Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (4): 1329-1335.doi: 10.12305/j.issn.1001-506X.2022.04.31
• Guidance, Navigation and Control • Previous Articles Next Articles
Virtual IMU and turntable attitude compensation for HITL simulation
Guofeng ZHOU1,2, Zhe CHEN1,*, Rui LYU1, Haifeng TU1, Shan XU1
- 1. Tactical Weapons Division, China Academy of Launch Vehicle Technology, Beijing 100076, China
2. College of Aerospace Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
-
Received:2021-09-21Online:2022-04-01Published:2022-04-01 -
Contact:Zhe CHEN
CLC Number:
Cite this article
Guofeng ZHOU, Zhe CHEN, Rui LYU, Haifeng TU, Shan XU. Virtual IMU and turntable attitude compensation for HITL simulation[J]. Systems Engineering and Electronics, 2022, 44(4): 1329-1335.
share this article

Fig.1
Two simulation states of IMU"


Fig.2
Horizontal turntable azimuth diagram"
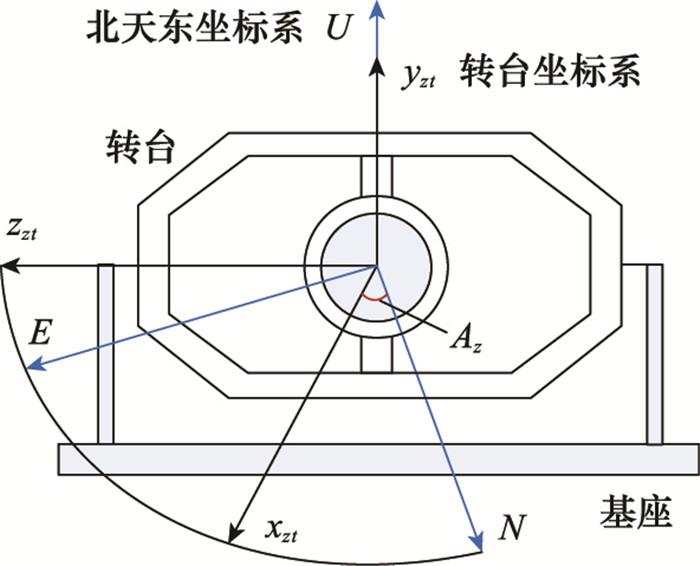
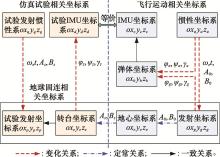
Fig.3
Relationship between coordinates"

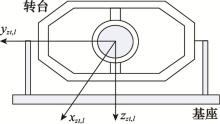
Fig.4
Vertical drive diagram of horizontal turntable"
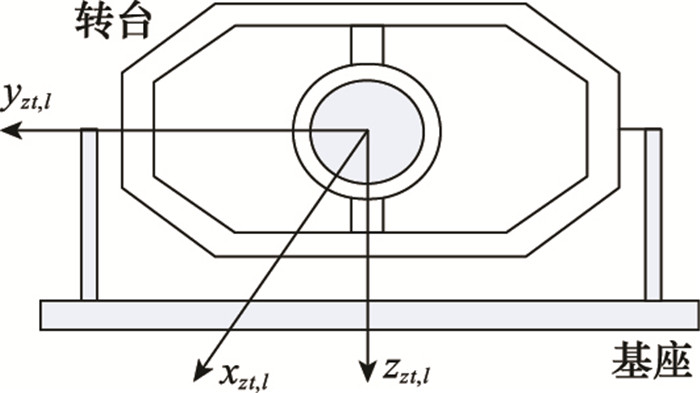
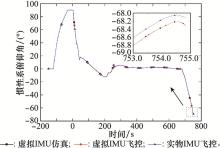
Fig.5
Pitch angles of virtual IMU"
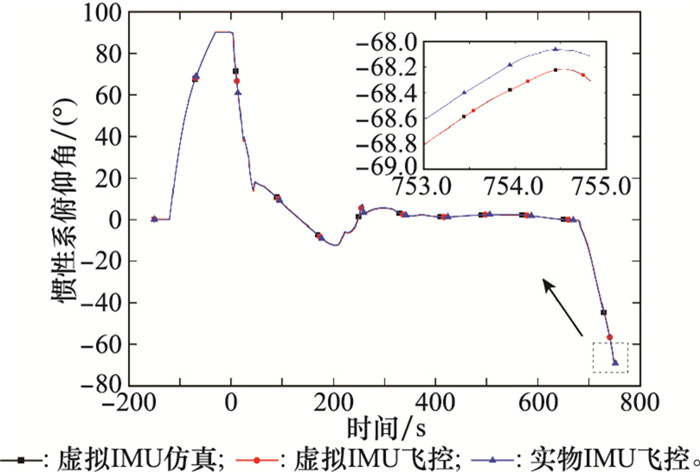

Fig.6
Yaw angles of virtual IMU"
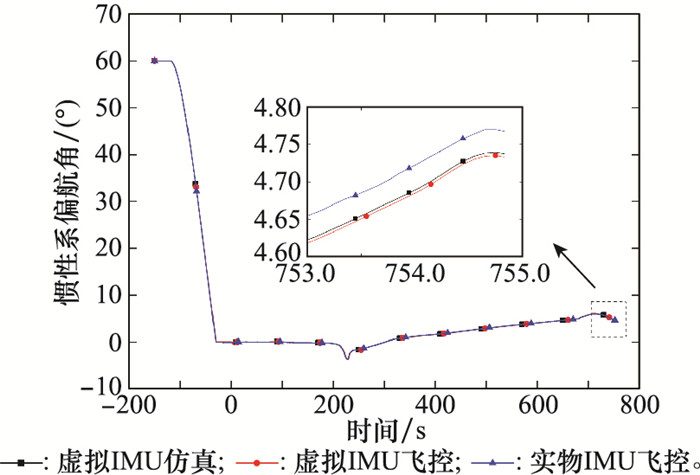
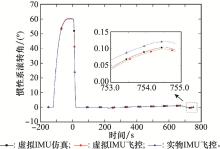
Fig.7
Roll angles of virtual IMU"
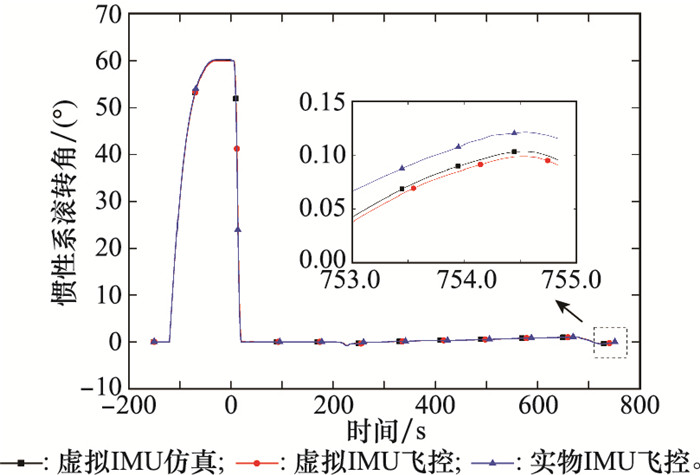
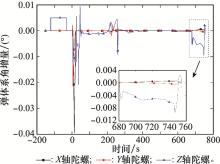
Fig.8
Angle increase of virtual IMU"
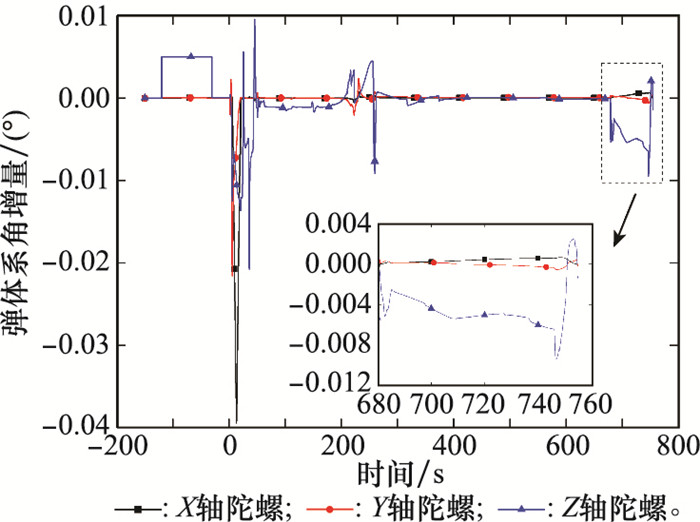
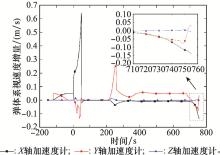
Fig.9
Speed increase of virtual IMU"
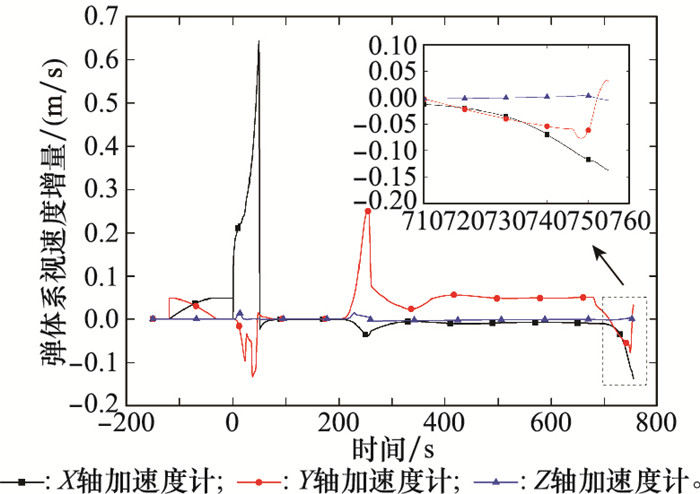

Fig.10
Pitch angles of physical IMU"

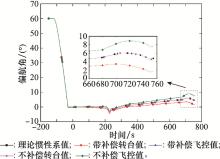
Fig.11
Yaw angles of physical IMU"
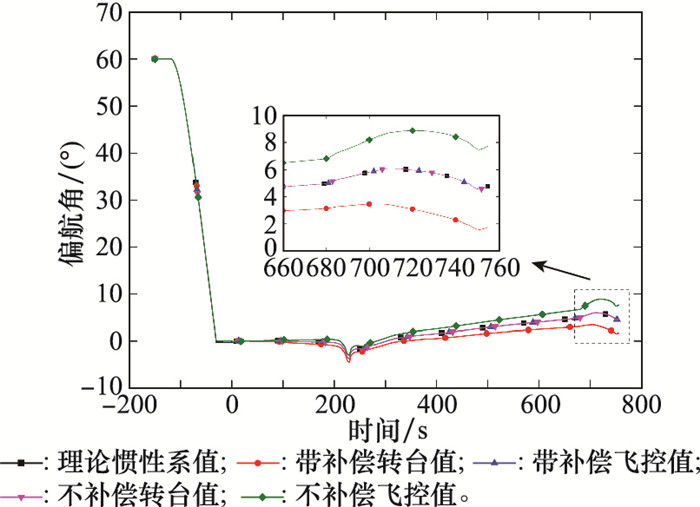
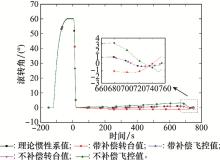
Fig.12
Roll angles of physical IMU"
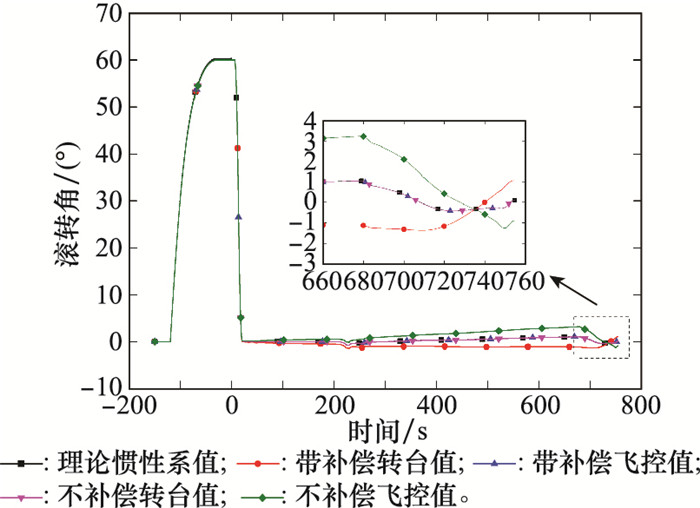
Table 1
Comparison of terminal attitude angles (°)"
| 序号 | 类别 | 名称 | 俯仰角 | 偏航角 | 滚转角 |
| 1 | 虚拟 IMU | 地面仿真结果 | -68.396 | 4.717 | 0.080 |
| 2 | 飞控计算结果 | -68.396 | 4.716 | 0.079 | |
| 3 | 实物对比结果 | -68.318 | 4.733 | 0.092 | |
| 4 | 实物 IMU | 理论惯性值 | -68.306 | 4.738 | 0.096 |
| 5 | 带补偿转台值 | -68.351 | 1.736 | 1.074 | |
| 6 | 带补偿飞控值 | -68.318 | 4.733 | 0.092 | |
| 7 | 不补偿转台值 | -68.319 | 4.734 | 0.092 | |
| 8 | 不补偿飞控值 | -68.328 | 7.729 | -0.896 |
| 1 | 蔡安江, 蒋周月, 郭师虹, 等. 半物理仿真技术工业应用现状及发展趋势[J]. 航天控制, 2018, 36 (3): 52- 56. |
| CAI A J , JIANG Z Y , GUO S H , et al. Development status and trends of hardware-in-the-loop simulation technology in industry[J]. Aerospace Control, 2018, 36 (3): 52- 56. | |
| 2 | YU S M , ZHENG S T , YANG Y . Hardware-in-the-loop simulation system for space manipulator docking: model, stability and experimental evaluation[J]. Journal of Beijing Institute of Technology, 2020, 29 (1): 89- 102. |
| 3 |
IRUM I , ROOH A , MALIK A . Hardware-in-the-loop flight motion simulation of flexible variable sweep aircraft[J]. Aircraft Engineering and Aerospace Technology, 2018, 90 (9): 1428- 1437.
doi: 10.1108/AEAT-08-2017-0180 |
| 4 |
SUN J X , LI B Y , WEN C Y , et al. Design and implementation of a real-time hardware-in-the-loop testing platform for a dual-rotor tail-sitter unmanned aerial vehicle[J]. Mechatronics, 2018, 56, 1- 15.
doi: 10.1016/j.mechatronics.2018.10.001 |
| 5 | 杨宝庆, 马杰, 姚郁. 飞行器半实物仿真装备研究进展与展望[J]. 宇航学报, 2020, 41 (6): 657- 665. |
| YANG B Q , MA J , YAO Y . Research progress and prospects of flight vehicle simulators for HWIL simulation[J]. Journal of Astronautics, 2020, 41 (6): 657- 665. | |
| 6 | 吕隽, 孔文华, 李景. 国外战术导弹半实物仿真试验验证能力发展分析[J]. 战术导弹技术, 2020, (2): 99- 104. |
| LV J , KONG W H , LI J . Development analysis of foreign tactical missile hardware-in-the-loop simulation capability[J]. Tactical Missile Technology, 2020, (2): 99- 104. | |
| 7 | 赵子鹏. 半实物仿真系统导弹姿态模拟奇异性研究[C]//2017年航空智能装备与试验测试技术年会论文集, 2017: 93-96. |
| ZHAO Z P. Research on the singularity of missile posture in hardware-in-the-loop simulation system[C]//Proc. of the Aviation Intelligent Equipment and Test Technology Conference, 2017: 93-96. | |
| 8 | XU X Z , ZHENG C L , XU F Q . A real-time numerical decoupling method for multi-DoF magnetic levitation rotary table[J]. Journal of Engineering, 2019, 9 (16): 2662- 2667. |
| 9 |
叶立军, 王静吉, 朱文山. 转台高精度模拟卫星三轴角速度解耦算法研究[J]. 上海航天(中英文), 2014, 31 (3): 15- 19.
doi: 10.3969/j.issn.1006-1630.2014.03.003 |
|
YE L J , WANG J J , ZHU W S . Research on decoupling algorithm of turntable high-fidelity simulating satellite's angular velocity[J]. Aerospace Shanghai (Chinese & English), 2014, 31 (3): 15- 19.
doi: 10.3969/j.issn.1006-1630.2014.03.003 |
|
| 10 |
李松健, 白涛, 熊淑杰, 等. 新型三轴转台模拟卫星飞行解耦方法研究[J]. 电子设计工程, 2016, 24 (3): 72- 75.
doi: 10.3969/j.issn.1674-6236.2016.03.022 |
|
LI S J , BAI T , XIONG S J , et al. A novel research on decoupling algorithm of turntable simulating satellite's flight[J]. Electronic Design Engineering, 2016, 24 (3): 72- 75.
doi: 10.3969/j.issn.1674-6236.2016.03.022 |
|
| 11 | 闽跃军, 魏宗康. 基于稳定奇异值的惯性平台全姿态控制方法[J]. 导航与控制, 2020, 19 (4/5): 143- 153. |
| MIN Y J , WEI Z K . All attitudes control method of inertial platform based on stable singular value[J]. Navigation and Control, 2020, 19 (4/5): 143- 153. | |
| 12 | 陈凯, 董凯凯, 陈朋印, 等. 半实物仿真中三轴转台姿态运动相似性研究[J]. 机械科学与技术, 2016, 35 (12): 1950- 1955. |
| CHEN K , DONG K K , CHEN P Y , et al. Attitude similarity of three-axis flight motion simulator in hardware-in-the-loop simulation[J]. Mechanical Science and Technology for Aerospace Engineering, 2016, 35 (12): 1950- 1955. | |
| 13 | 涂海峰, 阳丰俊, 李浩. 基于立式转台的导弹控制系统全射向半实物仿真技术研究[J]. 导弹与航天运载技术, 2019, (1): 80- 83. |
| TU H F , YANG F J , LI H . The whole direction of shooting for missile control system semi-physical simulation based on vertical turntable[J]. Missiles and Space Vehicles, 2019, (1): 80- 83. | |
| 14 | 纪彦宇, 李鑫, 金益辉, 等. 基于一子级栅格舵落区控制的高精度三轴转台指令算法的设计[J]. 上海航天(中英文), 2020, 37 (S2): 1- 6. 1-6, 35 |
| JI Y Y , LI X , JIN Y H , et al. Algorithm of three-axis precise turntable command based on one-level grid rudder landing zone control[J]. Aerospace Shanghai (Chinese & English), 2020, 37 (S2): 1- 6. 1-6, 35 | |
| 15 | 周胜良, 钟金凤, 高四宏. 卫星姿控系统半物理仿真中转台控制算法的实现[J]. 电子产品世界, 2016, 23 (Z1): 61- 63. |
| ZHOU S L , ZHONG J F , GAO S H . Realization of turntable control in semi-physical simulation of satellite control system[J]. Electronic Engineering & Product World, 2016, 23 (Z1): 61- 63. | |
| 16 | 陈克俊, 刘鲁华, 孟云鹤. 远程火箭飞行动力学与制导[M]. 北京: 国防工业出版社, 2014. |
| CHEN K J , LIU L H , MENG Y H . Launch vehicle flight dynamics and guidance[M]. Beijing: National Defense Industry Press, 2014. | |
| 17 |
赵书占, 许轲, 褚建川, 等. 基于捷联导引头去耦问题惯测注入方法研究[J]. 激光与红外, 2021, 51 (2): 232- 236.
doi: 10.3969/j.issn.1001-5078.2021.02.018 |
|
ZHAO S Z , XU K , CHU J C , et al. Research on INS injection method based on strap-down seeker decoupling[J]. Laser & Infrared, 2021, 51 (2): 232- 236.
doi: 10.3969/j.issn.1001-5078.2021.02.018 |
| [1] | Jia HUANG, Sijiang CHANG. Data-driven method based impact time and impact angle control guidance law [J]. Systems Engineering and Electronics, 2022, 44(10): 3213-3220. |
| [2] | Xingguang XU, Xiaofeng WANG, Lu YAO, Zhang REN. Formation configuration and communication topology optimization for fixed-wing UAVs [J]. Systems Engineering and Electronics, 2022, 44(9): 2936-2946. |
| [3] | Mengping ZHOU, Xiuyun MENG, Junhui LIU. Design of optimal sliding mode guidance law for head-on interception of maneuvering targets with large angle of fall [J]. Systems Engineering and Electronics, 2022, 44(9): 2886-2893. |
| [4] | Chuanxu LI, Xiuyun MENG, Jie WANG. Design of aircraft trajectory tracking controller based on disturbance observer [J]. Systems Engineering and Electronics, 2022, 44(8): 2593-2600. |
| [5] | Jinlin ZHANG, Jiong LI, Humin LEI, Wanli LI, Xiao TANG. Capture region of 3D realistic true proportional navigation with finite overload [J]. Systems Engineering and Electronics, 2022, 44(3): 986-997. |
| [6] | Qi WANG, Zhizhong LIAO, Fei YAN. Algorithm for countering velocity gate pull-off jamming of radar seeker based on probability data association [J]. Systems Engineering and Electronics, 2022, 44(2): 448-454. |
| [7] | Wanli LI, Jiong LI, Humin LEI, Changxin LUO, Shijie LI. Analysis of capture region based on sliding mode variable structure guidance law [J]. Systems Engineering and Electronics, 2021, 43(11): 3321-3329. |
| [8] | Chunsi XIE, Zhiying LIU, Yu SANG. Target recognition model of ship-to-land missile based on feature matching [J]. Systems Engineering and Electronics, 2021, 43(8): 2244-2253. |
| [9] | Xiaohai WANG, Xiuyun MENG, Feng ZHOU, Wenjie QIU. Sliding mode guidance law with impact angle constraint based on bias proportional navigation [J]. Systems Engineering and Electronics, 2021, 43(5): 1295-1302. |
| [10] | Yuekun ZHANG, Xiaohong JIA, Xiaoyang ZHANG, Weiqiang WANG. Integrated design of detection guidance and control based on finite time disturbance observer [J]. Systems Engineering and Electronics, 2021, 43(5): 1326-1334. |
| [11] | Jing SU, Huafeng HE, Yaomin HE, Yifan WANG, Xiaofei HAN. Filtering algorithm of missile-borne SINS/SAR integrated navigation considering SAR measurement characteristics [J]. Systems Engineering and Electronics, 2021, 43(4): 1044-1049. |
| [12] | Jiahui GUO, Binan JIANG, Zonghao TIAN. Guidance law design of guided projectile with impact angle and field-of-view constraints [J]. Systems Engineering and Electronics, 2021, 43(4): 1050-1056. |
| [13] | Zhiying LIU, Chunsi XIE, Jinjun LI, Yu SANG. Smoke region segmentation recognition algorithm based on improved Deeplabv3+ [J]. Systems Engineering and Electronics, 2021, 43(2): 328-335. |
| [14] | Zhizhong LIAO, Qi WANG. Influence and countermeasures of radar seeker pointing error on missile guidance [J]. Systems Engineering and Electronics, 2021, 43(2): 519-525. |
| [15] | Yu YANG, Da WU, Feng GAO, Jianjun DENG. Composite guidance law design method for super-low altitude engagement [J]. Systems Engineering and Electronics, 2021, 43(1): 208-215. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||