Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (6): 1977-1983.doi: 10.12305/j.issn.1001-506X.2022.06.25
• Guidance, Navigation and Control • Previous Articles Next Articles
Integrated navigation method of high-speed spinning flying bodybased on AEKF
Yiping DONG1,2, Ning LIU1,2,*, Zhong SU1,2, Jingxiao WANG1,2, Hongyang BAI3
- 1. School of Automation, Beijing Information Science and Technology University, Beijing 100192, China
2. Beijing Key Laboratory of High Dynamic Navigation Technology, Beijing Information Science andTechnology University, Beijing 100192, China
3. School of Energy and Power Engineering, Nanjing University of Science and Technology, Nanjing 210094, China
-
Received:2021-07-22Online:2022-05-30Published:2022-05-30 -
Contact:Ning LIU
CLC Number:
Cite this article
Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF[J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983.
share this article

Fig.1
Integrated navigation system composition"
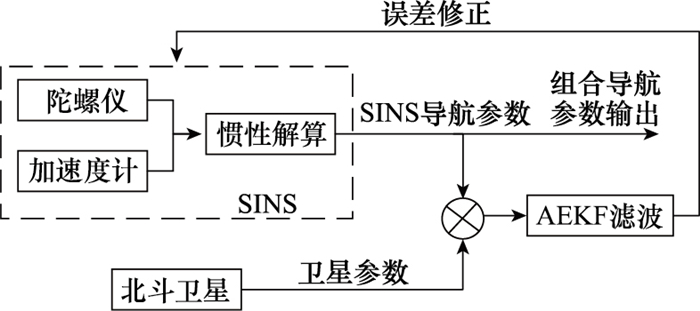
Fig.2
Hardware physical diagram"
Table 1
Simulation parameter error"
| 参数 | 误差项 | 误差值 |
| 陀螺仪 | 零位稳定性/(°/h) | 18 |
| 标度因数非线性/ppm | 3 200 | |
| 量程/(°/s) | ±7 200 | |
| 加速计 | 零位稳定性 | 12 mg |
| 标度因数非线性/ppm | 1 500 | |
| 量程 | ±30 g | |
| 状态协方差矩阵P | 位置/m2 | 0.0012 |
| 速度/(m·s-1) | 0.0012 | |
| 姿态/rad | 0.001 742 | |
| 过程噪声矩阵Q | 加速度计 | 122 mg |
| 陀螺仪/(°/h) | 182 | |
| 量测噪声矩阵R | 位置/m2 | 0.12 |
| 速度/(m·s-1) | 0.12 |

Fig.3
Measurement data of gyroscope"
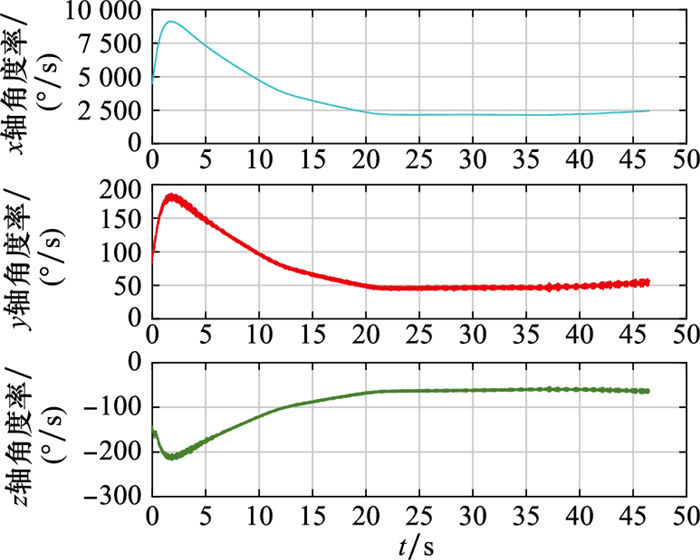
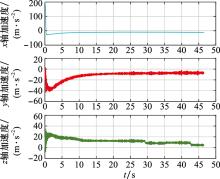
Fig.4
Measurement data of accelerometer"
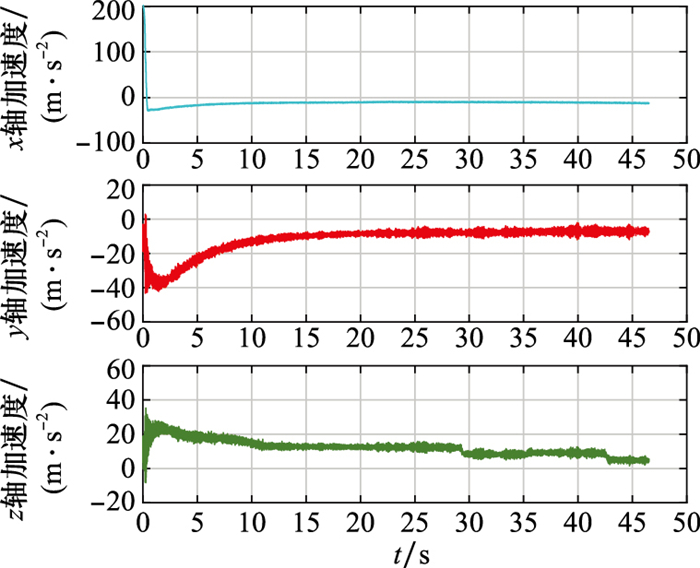

Fig.5
Integrated navigation track E-D plane information"
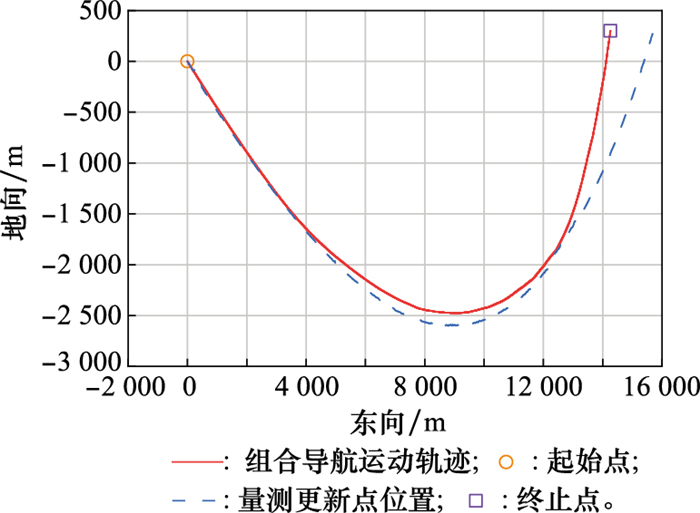
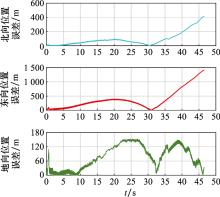
Fig.6
Position error before algorithm improvement"
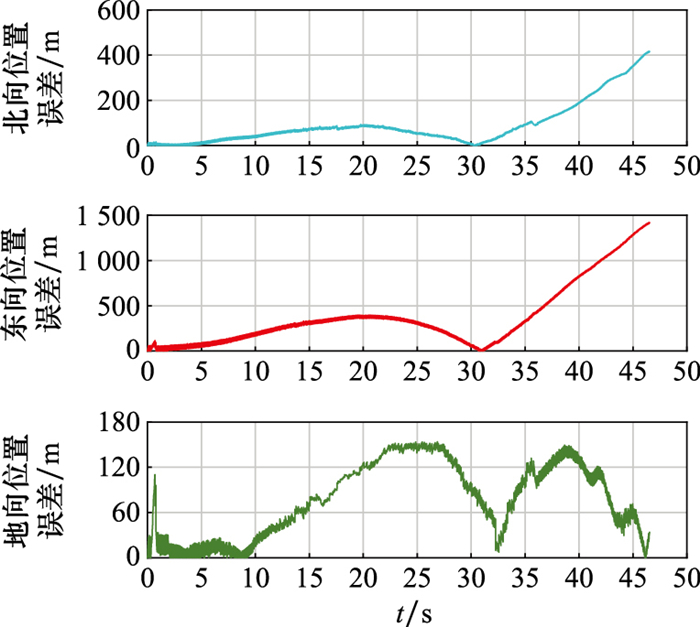
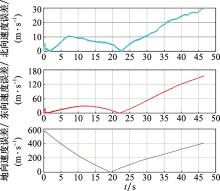
Fig.7
Velocity error before algorithm improvement"
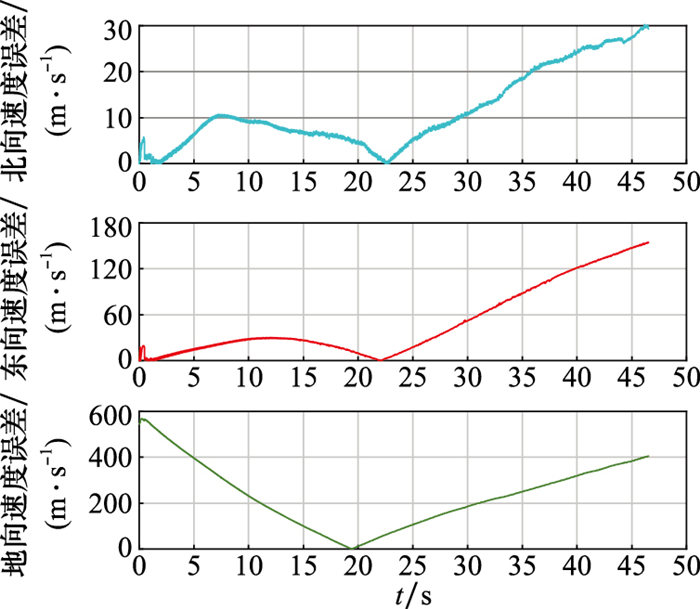
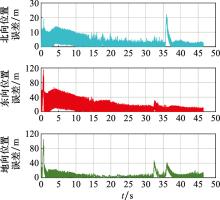
Fig.8
Position error when b=0.9"

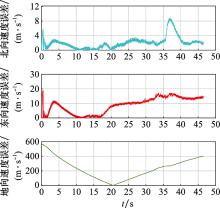
Fig.9
Velocity error when b=0.9"
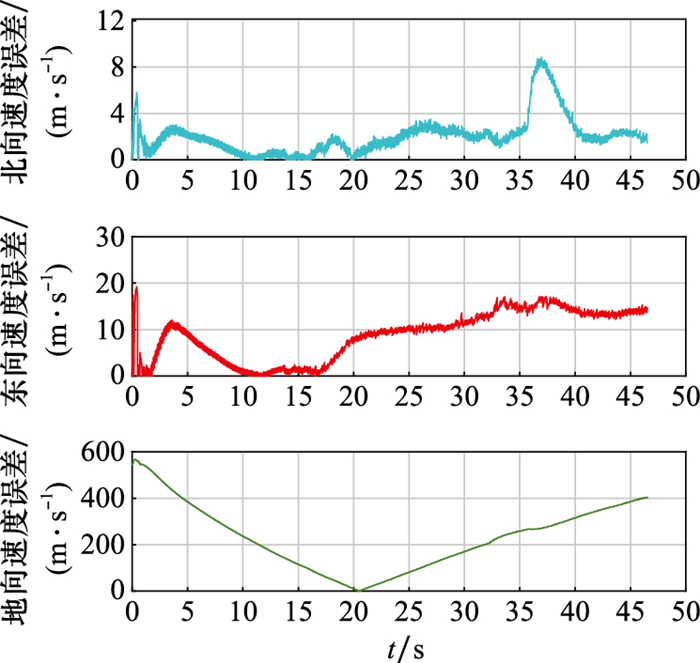

Fig.10
Position error when b=0.3"
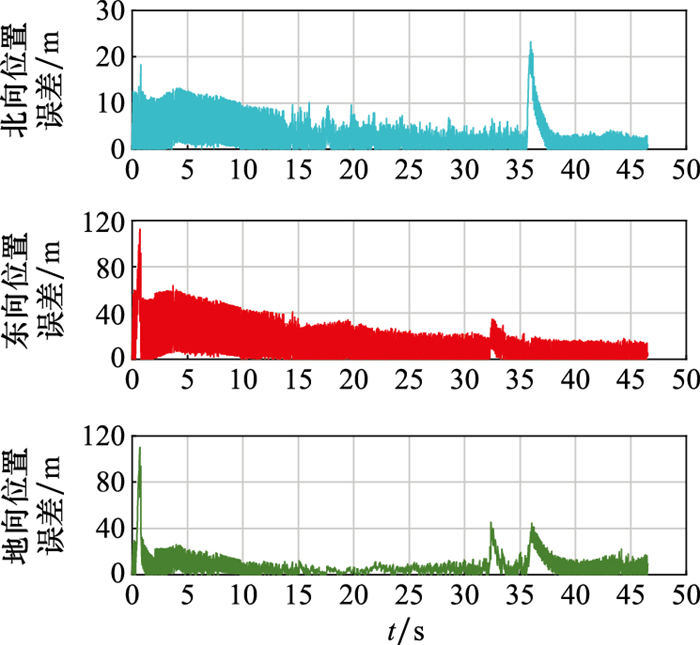
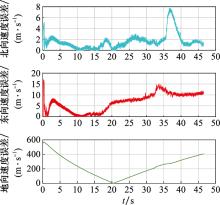
Fig.11
Velocity error when b=0.3"
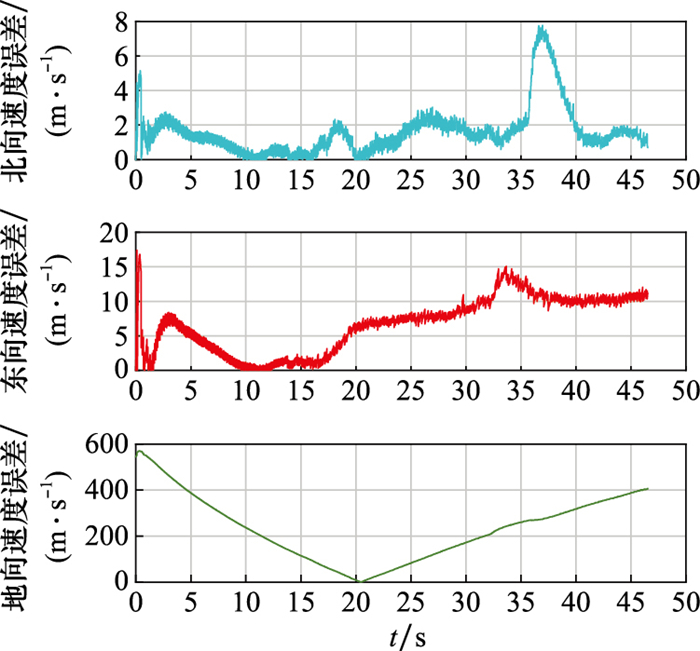
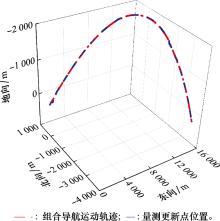
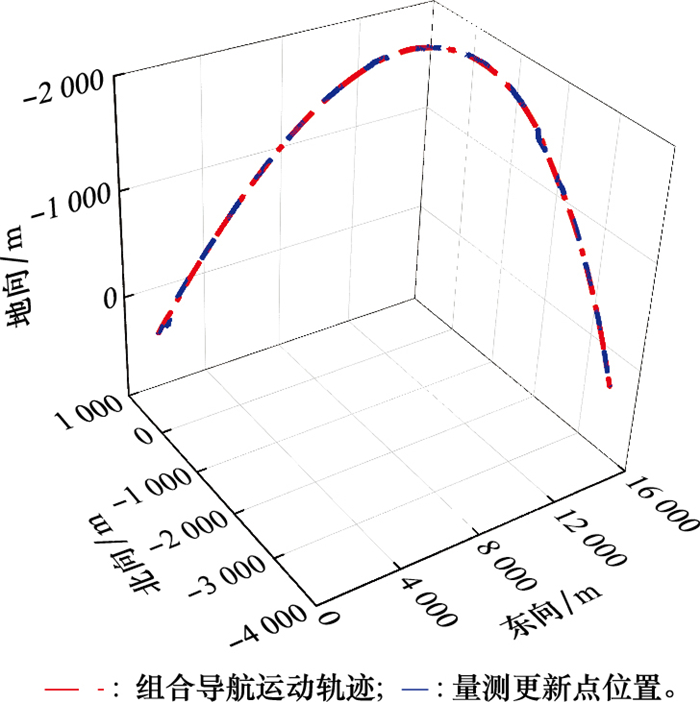
Fig.12
Integrated navigation motion trajectory diagram"
| 1 | WANG S E, LIU S, YANG G L, et al. The transfer alignment based on UKF for low-cost INS missile-borne weapons[C]//Proc. of the 6th International Conference on Information Science and Control Engineering, 2019: 1160-1163. |
| 2 | ANICHKINA T , PECZELI A , ROTH N . The future of US-Russian nuclear deterrence and arms control[J]. Bulletin of the Atomic Scientists, 2017, 73 (4): 1- 8. |
| 3 |
MI J , LI J , ZHANG X , et al. Roll angular rate measurement for high spinning projectiles based on redundant gyroscope system[J]. Micromachines, 2020, 11 (10): 940.
doi: 10.3390/mi11100940 |
| 4 | 路永乐, 潘英俊, 黎蕾蕾, 等. 采用双轴加速度计的旋转弹运动姿态角速率测量方法[J]. 中国惯性技术学报, 2015, 23 (2): 160- 164. |
| LU Y L , PAN Y J , LI L L , et al. Measurement method of projectile's heading and pitching angle velocities based on biaxial accelero-meter[J]. Journal of Chinese Inertial Technology, 2015, 23 (2): 160- 164. | |
| 5 |
BRAUN B . Performance analysis of GNSS-Aided inertial navigation systems on spinning flight vehicles[J]. Journal of Spacecraft and Rockets, 2019, 56 (5): 1624- 1635.
doi: 10.2514/1.A34403 |
| 6 | HOU B W, HE Z M, ZHOU H Y, et al. SINS/CNS integrated navigation system for ballistic missile based on maximum correntropy Kalman filter[C]//Proc. of the Annual American Control Conference, 2018: 1473-1478. |
| 7 |
LIU F C , SU Z , ZHAO H , et al. Attitude measurement for high-spinning projectile with a hollow MEMS IMU consisting of multiple accelerometers and gyros[J]. Sensors, 2019, 19 (8): 1799.
doi: 10.3390/s19081799 |
| 8 | REN B, LI H. On SINS for rocket bomb trajectory correction based on MEMS[C]//Proc. of the 3rd International Conference on Intelligent Networks and Intelligent Systems, 2010: 296- 299. |
| 9 | ZHAO H D , LI Z P , ZHANG H S . Ultra-tight GPS/INS integration based long-range rocket projectile navigation method[J]. Journal of Measurement Science and Instrumentation, 2015, 6 (2): 153- 160. |
| 10 |
ZHU J L , WU P L , BO Y M . A novel attitude estimation algorithm based on the non-orthogonal magnetic sensors[J]. Sensors, 2016, 16 (5): 730.
doi: 10.3390/s16050730 |
| 11 |
ZHAO H , SU Z , LIU F C , et al. Magnetometer-based phase shifting ratio method for high spinning projectile's attitude measurement[J]. IEEE Access, 2019, 7, 22509- 22522.
doi: 10.1109/ACCESS.2019.2896612 |
| 12 |
LIU D , WANG H J , QIA Q Y , et al. A low-cost method of improving the GNSS/SINS integrated navigation system using multiple receivers[J]. Electronics, 2020, 9 (7): 1079.
doi: 10.3390/electronics9071079 |
| 13 | NOVEL A, TRILAKSONO B R, SASON-GKO R A. Guided rocket navigation design and implementation on hardware in loop simulation[C]//Proc. of the 3rd International Conference on Instrumentation, Communications, Information Technology and Biomedical Engineering, 2013: 249-254. |
| 14 | 闫爱天, 陈雄, 周长省, 等. 基于地磁传感器与陀螺仪的姿态测量法[J]. 弹箭与制导学报, 2016, 36 (2): 143- 146. |
| YAN A T , CHEN X , ZHOU C S , et al. Attitude measurement method based on magnetometer and MEMS gyroscope[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2016, 36 (2): 143- 146. | |
| 15 |
张浩然, 易文俊, 管军, 等. 基于MEMS/北斗的火箭弹弹道参数测量方法[J]. 兵器装备工程学报, 2017, 38 (9): 41- 47.
doi: 10.11809/scbgxb2017.09.009 |
|
ZHANG H R , YI W J , GUAN J , et al. Research on rocket projectile ballistic parameters measurement based on MEMS/BD[J]. Journal of Ordnance Equipment Engineering, 2017, 38 (9): 41- 47.
doi: 10.11809/scbgxb2017.09.009 |
|
| 16 |
WANG M S , WU W Q , ZHOU P Y , et al. State transformation extended Kalman filter for GPS/SINS tightly coupled integration[J]. GPS Solutions, 2018, 22 (4): 112.
doi: 10.1007/s10291-018-0773-3 |
| 17 | YAO L , ZHANG H , HUANG X P . Analysis on error compensation for integrated navigation based on forgotten Kalman filter[J]. Journal of Physics Conference Series, 2019, 1187 (5): 2008. |
| 18 |
ZHAO X , LI J L , YAN X L , et al. Robust adaptive cubature Kalman filter and its application to ultra-tightly coupled SINS/GPS navigation system[J]. Sensors, 2018, 18 (7): 2352.
doi: 10.3390/s18072352 |
| 19 | CHEN Y M , LI W , WANG Y Q . A robust adaptive indirect in-motion coarse alignment method for GPS/SINS integrated navigation system[J]. Measurement, 2020, 172 (8): 108834. |
| 20 |
SEBESTA K D , BOIZOT N . A real-time adaptive high-gain EKF, applied to a quadcopter inertial navigation system[J]. IEEE Trans.on Industrial Electronics, 2014, 61 (1): 495- 503.
doi: 10.1109/TIE.2013.2253063 |
| 21 | 孟秀云, 王语嫣. 一种SINS/北斗紧组合导航系统的改进自适应扩展卡尔曼滤波算法[J]. 北京理工大学学报, 2018, 38 (6): 625- 630. 625-630, 636 |
| MENG X Y , WANG Y Y . An improved adaptive extended Kalmanfiltering algorithm of SINS/GPS tightly-coupled integrated navigation system[J]. Transactions of Beijing Institute of Technology, 2018, 38 (6): 625- 630. 625-630, 636 | |
| 22 | ALI J . Strapdown inertial navigation system/astronavigation system data synthesis using innovation-based fuzzy adaptive Kalman filtering[J]. IET Science, Measurement & Technology, 2010, 4 (5): 246- 255. |
| 23 |
MAHBOUB V , MOHAMMADI D . A constrained total extended Kalman filter for integrated navigation[J]. The Journal of Navigation, 2018, 71 (4): 971- 988.
doi: 10.1017/S0373463318000012 |
| 24 | LONG Z X, ZHANG X L, PENG X F. An improved adaptive extended Kalman filter used for target tracking[C]//Proc. of the Chinese Automation Congress, 2019: 1017-1022. |
| 25 | NARASIMHAPPA M , MAHINDRAKAR A D , GUIZILINI V C , et al. MEMS-based IMU drift minimization: Sage Husa adaptive robust Kalman filtering[J]. IEEE Sensors Journal, 2020, 20 (1): 250- 260. |
| 26 |
DING W D , WANG J L , RIZOS C , et al. Improving adaptive Kalman estimation in GPS/INS integration[J]. Journal of Navigation, 2007, 60 (3): 517- 529.
doi: 10.1017/S0373463307004316 |
| 27 | 陈沣, 杨鹏翔. 基于长航时飞行器的SINS/GNSS自适应组合导航算法[J]. 弹箭与制导学报, 2016, 36 (3): 18- 21. |
| CHENG F , YANG P X . Self-adaptive SINS/GNSS integrated arithmetic based on long-endurance aerial vehicle[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2016, 36 (3): 18- 21. | |
| 28 | 刘芳, 王斌翊, 何浩, 等. 一种适用于低成本制导火箭弹的坐标转换方法[J]. 火炮发射与控制学报, 2016, 37 (3): 36- 40. |
| LIU F , WANG B Y , HE H , et al. A method of coordinate transformation for low-cost guided rocket projectiles[J]. Journal of Gun Launch & Control, 2016, 37 (3): 36- 40. | |
| 29 | TITTERTON D H , WESTON J L . Strapdown inertial navigation technology[M]. London: The Institution of Engineering and Techology Digital Library, 2004. |
| 30 |
CHANG L B , LI J S , CHEN S Y . Initial alignment by attitude estimation for strapdown inertial navigation systems[J]. IEEE Trans.on Instrumentation and Measurement, 2015, 64 (3): 784- 794.
doi: 10.1109/TIM.2014.2355652 |
| [1] | Yingying JIANG, Shuguo PAN, Fei YE, Wang GAO, Chun MA, Hao WANG. Approach for detection of slowly growing fault based on robust estimation and improved AIME [J]. Systems Engineering and Electronics, 2022, 44(9): 2894-2902. |
| [2] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [3] | Zhaoqiang SUN, Zhigui WANG, Fei MENG, Luyu LI, Zhong YU, Yan CHEN. Ballistic target tracking filter design based on EKF and ballistic equations [J]. Systems Engineering and Electronics, 2022, 44(10): 3207-3212. |
| [4] | Shuguang SUN, Qixin WEN. Aircraft height optimization algorithm of integrated navigation in terminal area based on height anomaly compensation [J]. Systems Engineering and Electronics, 2021, 43(9): 2612-2619. |
| [5] | Zhe WEN, Hongwei BIAN, Heng MA, Tao ZANG. Simulation test method of inertial navigation polar performance at middle and low latitudes [J]. Systems Engineering and Electronics, 2021, 43(9): 2620-2627. |
| [6] | Renjie ZHAO, Baiqing HU, Xu LYU, Jiayu TIAN. Filtering algorithm of UKF integrated navigation based on dual-Euler angles [J]. Systems Engineering and Electronics, 2021, 43(7): 1912-1920. |
| [7] | Baojie CAI, Lei SHAO. Robust filtering algorithm based on three discriminant domain and least squares fitting [J]. Systems Engineering and Electronics, 2021, 43(5): 1346-1353. |
| [8] | Jing SU, Huafeng HE, Yaomin HE, Yifan WANG, Xiaofei HAN. Filtering algorithm of missile-borne SINS/SAR integrated navigation considering SAR measurement characteristics [J]. Systems Engineering and Electronics, 2021, 43(4): 1044-1049. |
| [9] | Zhizhong LIAO, Qi WANG. Influence and countermeasures of radar seeker pointing error on missile guidance [J]. Systems Engineering and Electronics, 2021, 43(2): 519-525. |
| [10] | Xing LIU, Houqing XIONG, Jianyin ZHAO, Min ZHU. State prediction method of online non-stationary dynamic system based on improved sparse KELM [J]. Systems Engineering and Electronics, 2020, 42(9): 2022-2032. |
| [11] | Xu LYU, Baiqing HU, Yongbin DAI, Renjie ZHAO. Application of USQUE based on PSO in attitude estimation of integrated navigation [J]. Systems Engineering and Electronics, 2020, 42(6): 1366-1371. |
| [12] | Kaixin LUO, Meiping WU, Ying FAN. Robust adaptive filtering based on maximum entropy method and its application [J]. Systems Engineering and Electronics, 2020, 42(3): 667-673. |
| [13] | Kanghui HE, Chaoyang DONG. Orthogonal transformed fifth-order cubature Kalman filter for navigation [J]. Systems Engineering and Electronics, 2020, 42(3): 680-685. |
| [14] | Xiaolong WANG, Haiying LIU, Jingqi WANG. Collaborative navigation of air-ground multi-agent based on hierarchical SLAM [J]. Systems Engineering and Electronics, 2020, 42(1): 166-171. |
| [15] | ZHANG Chuang, GUO Chen, ZHANG Daheng. Adaptive iterative particle filter and its application for ship integrated navigation [J]. Systems Engineering and Electronics, 2019, 41(4): 883-888. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||