Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (1): 193-201.doi: 10.12305/j.issn.1001-506X.2023.01.23
• Guidance, Navigation and Control • Previous Articles
Improved three-dimensional A* algorithm of real-time path planning based on reinforcement learning
Zhi REN1,2, Dong ZHANG1,2,*, Shuo TANG1,2
- 1. School of Astronautics, Northwestern Polytechnical University, Xi'an 710072, China
2. Shaanxi Key Laboratory of Space Vehicle Design, Xi'an 710072, China
-
Received:2021-08-12Online:2023-01-01Published:2023-01-03 -
Contact:Dong ZHANG
CLC Number:
Cite this article
Zhi REN, Dong ZHANG, Shuo TANG. Improved three-dimensional A* algorithm of real-time path planning based on reinforcement learning[J]. Systems Engineering and Electronics, 2023, 45(1): 193-201.
share this article
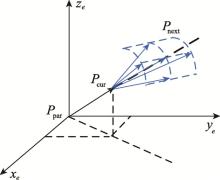
Fig.1
Schematic diagram of expansion mode"

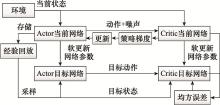
Fig.2
Schematic diagram of Actor-Critic network"
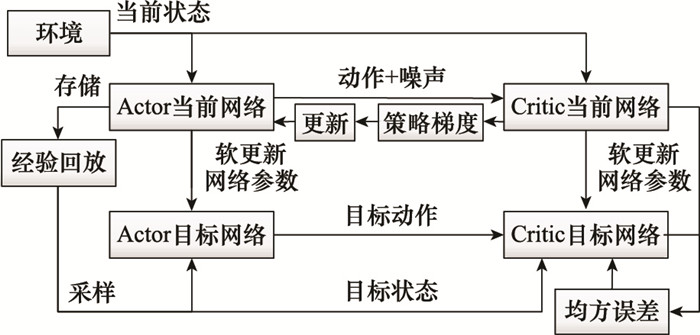
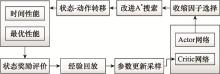
Fig.3
Schematic diagram of algorithm cycle structure"
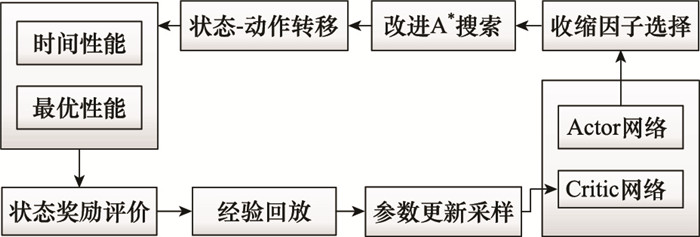

Fig.4
Flow chart of algorithm combined with DDPG"
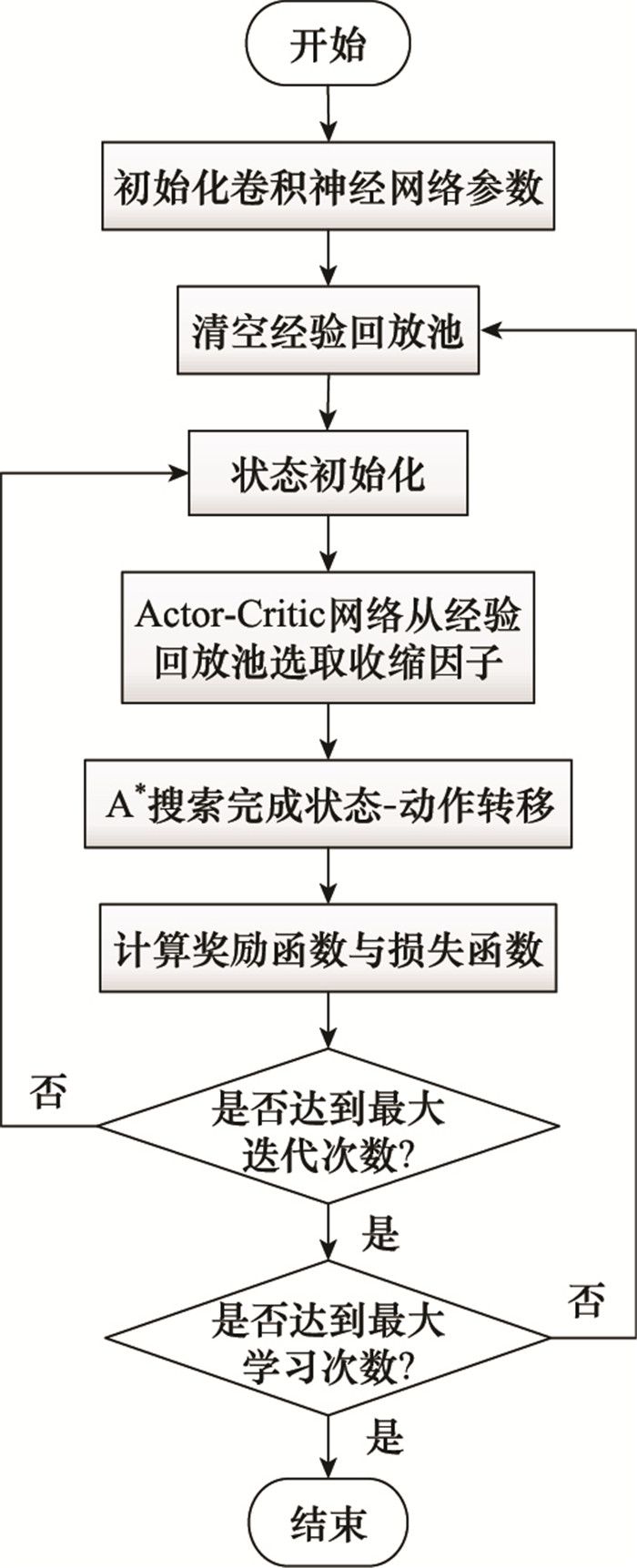

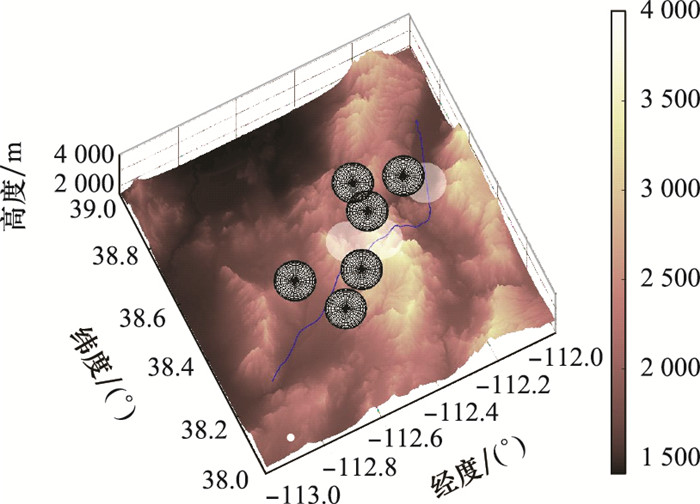
Fig.5
Topographic map of battlefield environment"
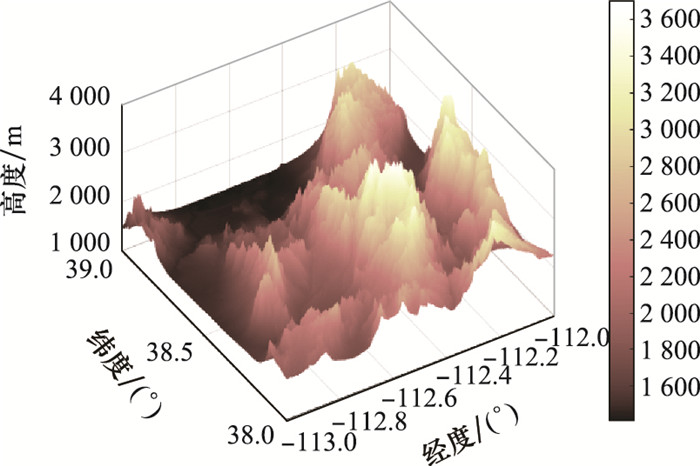
Table 1
Aircraft performance parameters table"
| 序号 | 性能 | 性能参数 |
| 1 | 飞行速度/(m/s) | 200 |
| 2 | 安全飞行高度/m | 500 |
| 3 | 最大俯仰角/(°) | 20 |
| 4 | 最大航向角/(°) | 45 |
| 5 | 最小转弯半径/m | 1 242.6 |
Table 2
Prohibited area parameters table"
| 序号 | 经纬坐标/(°) | 威胁半径/km |
| 1 | (112.4, 38.6) | 5 |
| 2 | (112.7, 38.4) | 5 |
| 3 | (112.5, 38.44) | 5 |
| 4 | (112.6, 38.25) | 5 |
| 5 | (112.4, 38.4) | 5 |
| 6 | (112.2, 38.5) | 5 |
Fig.6
2D comparison diagram of planning results between standard and improved A* algorithm"
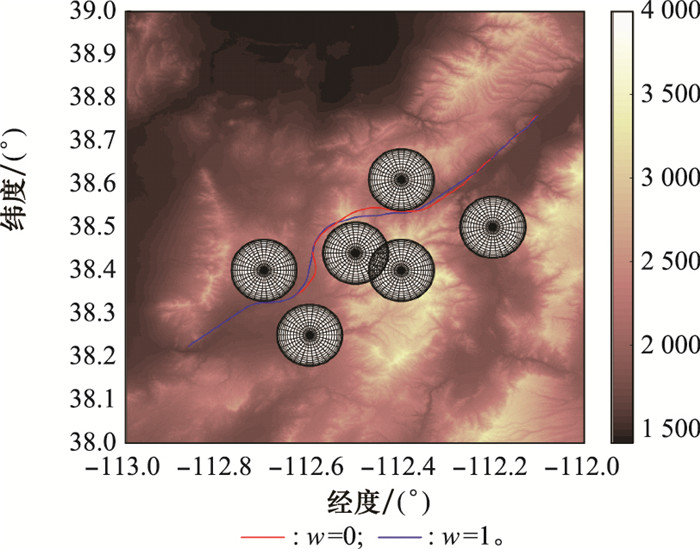
Fig.7
3D comparison diagram of planning results between standard and improved A* algorithm"
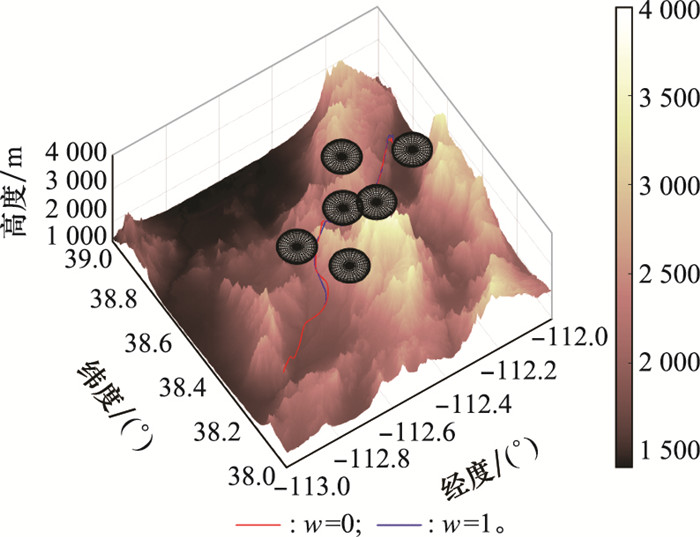
Table 3
Reward function parameters table"
| 序号 | 性能 | 性能参数 |
| 1 | ti*/s | 264.13 |
| 2 | timax/s | 0.932 |
| 3 | ei* | 49 |
| 4 | eimax | 53 |
Table 4
Convolutional neural network parameters table"
| 序号 | 性能 | 性能参数 |
| 1 | Actor网络学习率 | 0.001 |
| 2 | Critic网络学习率 | 0.002 |
| 3 | Batch训练样本大小 | 128 |
| 4 | 经验回放池大小 | 10 000 |
| 5 | 软策略更新因子 | 0.01 |
| 6 | 收缩因子初值 | 0.4 |
| 7 | 即时回报收敛因子 | 0.9 |

Fig.8
Variation diagram of improved algorithm optimal performance"
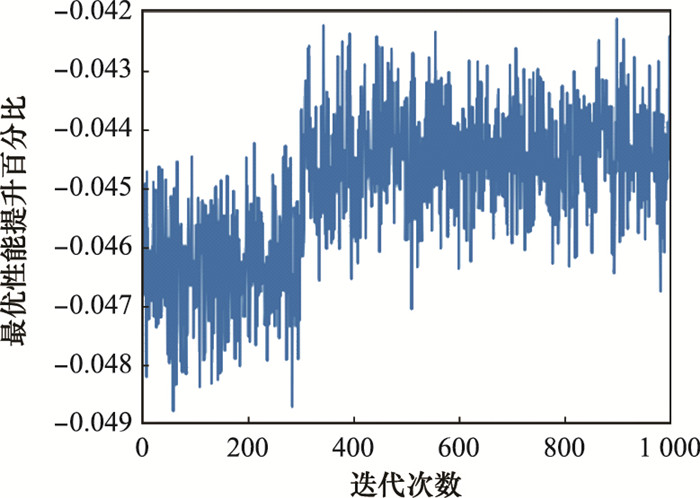
Fig.9
Variation diagram of improved algorithm time performance"
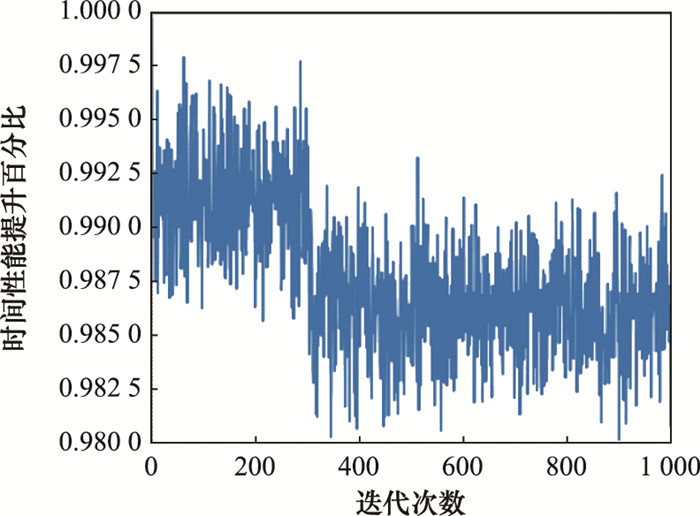
Fig.10
Diagram of shrinkage factor of iterative convergence"
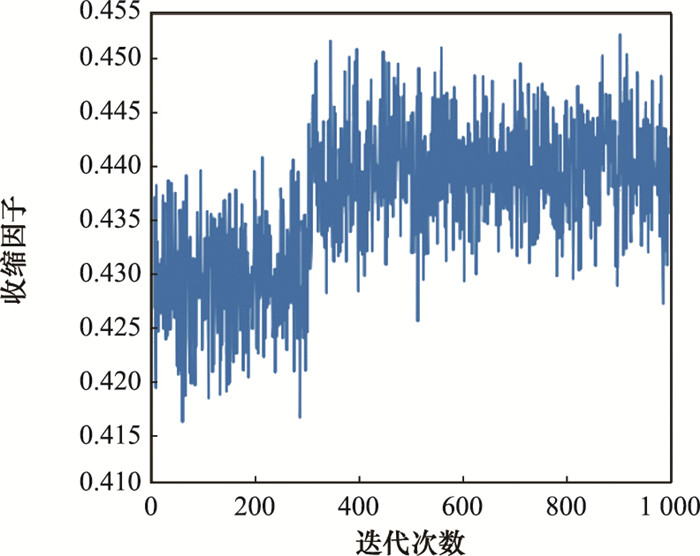
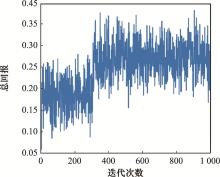
Fig.11
Diagram of total reward of iterative convergence"
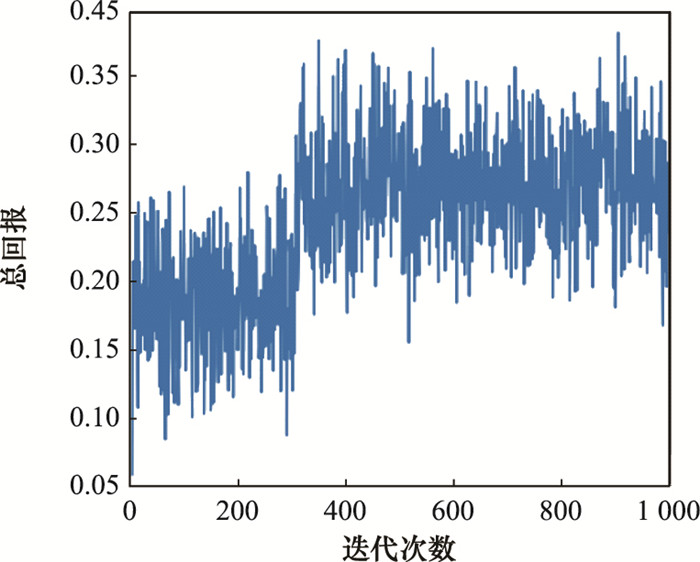
Table 5
Simulation scene parameters table (°)"
| 场景 | 起始节点 | 目标节点 | 禁飞区1 | 禁飞区2 | 禁飞区3 | 禁飞区4 | 禁飞区5 | 禁飞区6 |
| 1 | (112.9, 38.2) | (112.1, 38.8) | (112.4, 38.6) | (112.7, 38.4) | (112.5, 38.44) | (112.6, 38.25) | (112.4, 38.4) | (112.2, 38.5) |
| 2 | (112.9, 38.7) | (112.1, 38.2) | (112.4, 38.6) | (112.7, 38.4) | (112.5, 38.44) | (112.6, 38.25) | (112.4, 38.4) | (112.2, 38.5) |
| 3 | (112.9, 38.5) | (112.1, 38.4) | (112.4, 38.6) | (112.7, 38.4) | (112.5, 38.44) | (112.6, 38.25) | (112.4, 38.4) | (112.2, 38.5) |
| 4 | (112.9, 38.2) | (112.1, 38.8) | (112.7, 38.3) | (112.4, 38.6) | (112.4, 38.3) | (112.2, 38.4) | (112.6, 38.3) | (112.6, 38.4) |
| 5 | (112.9, 38.7) | (112.1, 38.2) | (112.7, 38.3) | (112.4, 38.6) | (112.4, 38.3) | (112.2, 38.4) | (112.6, 38.3) | (112.6, 38.4) |
| 6 | (112.9, 38.5) | (112.1, 38.4) | (112.7, 38.3) | (112.4, 38.6) | (112.4, 38.3) | (112.2, 38.4) | (112.6, 38.3) | (112.6, 38.4) |
Table 6
Simulation results table of different scenarios"
| 场景 | DDPG训练策略 | 指数衰减方法 | |||
| 仿真时间/s | 节点 | 仿真时间/s | 节点 | ||
| 1 | 1.373 | 52 | 9.612 | 69 | |
| 2 | 2.651 | 61 | 38.347 | 76 | |
| 3 | 0.894 | 54 | 2.811 | 54 | |
| 4 | 1.081 | 46 | 4.692 | 50 | |
| 5 | 1.670 | 52 | 19.793 | 74 | |
| 6 | 0.612 | 47 | 6.185 | 48 | |
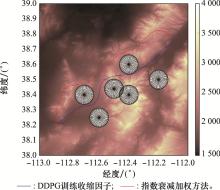
Fig.12
2D comparison diagram of planning results between two improved A* algorithms"
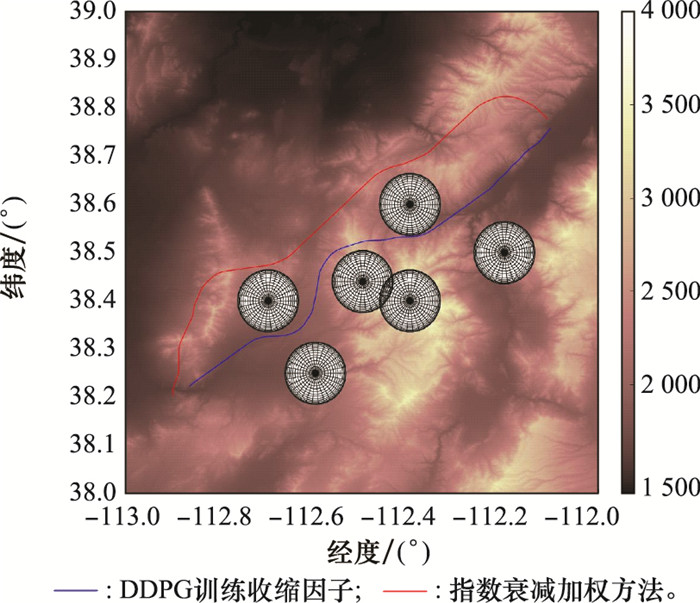
Fig.13
3D comparison diagram of planning results between two improved A* algorithms"
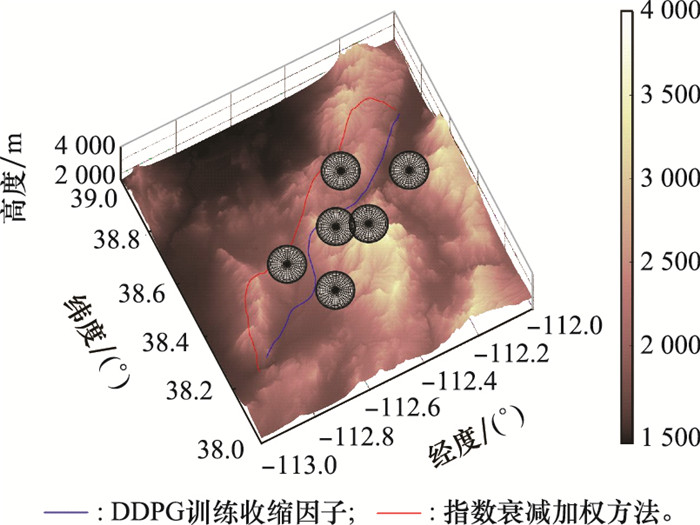
Fig.14
2D diagram of planning results for improved algorithm in dynamic scenario"
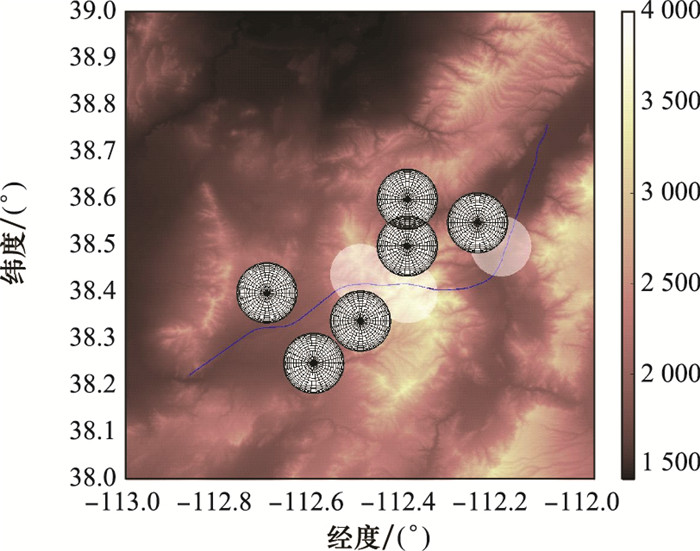
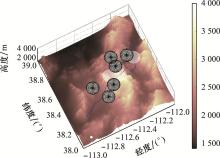
Fig.15
3D diagram of planning results for improved algorithm in dynamic scenario"
| 1 |
PARK S O , MIN C L , KIM J . Trajectory planning with collision avoidance for redundant robots using Jacobian and artificial potential field-based real-time inverse kinematics[J]. International Journal of Control, Automation and Systems, 2020, 18 (8): 2095- 2107.
doi: 10.1007/s12555-019-0076-7 |
| 2 | JAMSHIDI V , NEKOUKAR V , REFAN M H . Analysis of parallel genetic algorithm and parallel particle swarm optimization algorithm UAV path planning on controller area network[J]. Journal of Control, Automation and Electrical Systems, 2019, 31 (1): 129- 140. |
| 3 | QU C Z , GAI W D , ZHONG M Y , et al. A novel reinforcement learning based grey wolf optimizer algorithm for unmanned aerial vehicles (UAVs) path planning[J]. Applied Soft Computing, 2020, 89 (1): 106099. |
| 4 | RASHID R, PERUMAL N, ELAMVAZUTHI I, et al. Mobile robot path planning using ant colony optimization[C]//Proc. of the 2nd IEEE International Symposium on Robotics and Manufacturing Automation, 2016: 16657753. |
| 5 | XU Z , ZHANG E , CHEN Q W . Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization[J]. Journal of Systems Engineering and Electronics, 2020, 31 (1): 130- 141. |
| 6 |
LAI Q , XU G H . A new path planning method of mobile robot based on adaptive dynamic firefly algorithm[J]. Modern Physics Letters B, 2020, 34 (29): 2050322.
doi: 10.1142/S0217984920503224 |
| 7 | SHANG E , DAI B , NIE Y M , et al. An improved A-Star based path planning algorithm for autonomous land vehicles[J]. International Journal of Advanced Robotic Systems, 2020, 17 (5) |
| 8 |
ZHANG A , CHONG L , BI W H . Rectangle expansion A* pathfinding for grid maps[J]. Chinese Journal of Aeronautics, 2016, 29 (5): 1385- 1396.
doi: 10.1016/j.cja.2016.04.023 |
| 9 | 赵真明, 孟正大. 基于加权A*算法的服务型机器人路径规划[J]. 华中科技大学学报(自然科学版), 2008, 36 (S1): 196- 198. |
| ZHAO Z M , MENG Z D . Path planning of service robot based on weighted A* algorithm[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2008, 36 (S1): 196- 198. | |
| 10 | REN Y Y, SONG X R, GAO S. Research on path planning of mobile robot based on improved A* in special environment[C]//Proc. of the 3rd IEEE International Symposium on Autonomous Systems, 2019: 12-16. |
| 11 | LIU S W, MA Y. Research for bidirectional path planning based on an improved A* algorithm[C]//Proc. of the IEEE International Conference on Advances in Electrical Engineering and Computer Applications, 2020: 1036-1039. |
| 12 | SHANG E, DAI B, NIE Y M, et al. A guide-line and key-point based A-star path planning algorithm for autonomous land vehicles[C]//Proc. of the 23rd IEEE International Conference on Intelligent Transportation Systems, 2020. |
| 13 | 王生印, 龙腾, 王祝, 等. 基于即时修复式稀疏A*算法的动态航迹规划[J]. 系统工程与电子技术, 2018, 40 (12): 2714- 2721. |
| WANG S Y , LONG T , WANG Z , et al. Dynamic path planning based on real-time repair sparse A* algorithm[J]. Systems Engineering and Electronics, 2018, 40 (12): 2714- 2721. | |
| 14 | 王维, 裴东, 冯璋. 改进A*算法的移动机器人最短路径规划[J]. 计算机应用, 2018, 38 (5): 1523- 1526. |
| WANG W , PEI D , FENG Z . Shortest path planning for mobile robots based on improved A* algorithm[J]. Journal of Computer Applications, 2018, 38 (5): 1523- 1526. | |
| 15 | 李晨溪, 曹雷, 张永亮, 等. 基于知识的深度强化学习研究综述[J]. 系统工程与电子技术, 2017, 39 (11): 2603- 2613. |
| LI C X , CAO L , ZHANG Y L , et al. A review of knowledge based deep reinforcement learning[J]. Systems Engineering and Electronics, 2017, 39 (11): 2603- 2613. | |
| 16 | CHEN H Y , JI Y , NIU L . Reinforcement learning path planning algorithm based on obstacle area expansion strategy[J]. Intelligent Service Robotics, 2020, 13 (6): 289- 297. |
| 17 | LIN X G, GUO R X. Path planning of unmanned surface vehicle based on improved Q-learning algorithm[C]//Proc. of the 3rd IEEE International Conference on Electronic Information Technology and Computer Engineering, 2019: 302-306. |
| 18 | LI Y B, ZHANG S T, YE F, et al. A UAV path planning method based on deep reinforcement learning[C]//Proc. of the IEEE USNC-CNC-URSI North American Radio Science Meeting, 2020: 93-94. |
| 19 | 董培方, 张志安, 梅新虎, 等. 引入势场及陷阱搜索的强化学习路径规划算法[J]. 计算机工程与应用, 2018, 54 (16): 129- 134. |
| DONG P F , ZHANG Z A , MEI X H , et al. Reinforcement learning path planning algorithm based on gravitational potential field and trap search[J]. Computer Engineering and Applications, 2018, 54 (16): 129- 134. | |
| 20 | ZHENG S F , LIU H . Improved multi-agent deep deterministic policy gradient for path planning-based crowd simulation[J]. IEEE Access, 2019, 7, 147755- 147770. |
| 21 | GAO J L , YE W J , GUO J , et al. Deep reinforcement learning for indoor mobile robot path planning[J]. Sensors, 2020, 20 (19): 5493. |
| 22 | GAO X , FANG Y W , WU Y L . Fuzzy Q learning algorithm for dual-aircraft path planning to cooperatively detect targets by passive radars[J]. Journal of Systems Engineering and Electronics, 2013, 24 (5): 800- 810. |
| 23 | LI B H , WU Y J . Path planning for UAV ground target tracking via deep reinforcement learning[J]. IEEE Access, 2020, 8, 29064- 29074. |
| 24 | CHEN Y, HU J L, HIRASAWA K, et al. Optimizing reserve size in genetic algorithms with reserve selection using reinforcement learning[C]//Proc. of the IEEE SICE Annual Conference, 2007: 1341-1347. |
| 25 | ADARSG S, HUNG L, SUSHIL L, et al. Deep reinforcement learning using genetic algorithm for parameter optimization[C]//Proc. of the 3rd IEEE International Conference on Robotic Computing, 2019: 596-601. |
| 26 | SYED I A M, MOINUL I, MD M U. Q-learning based particle swarm optimization algorithm for optimal path planning of swarm of mobile robots[C]//Proc. of the 1st IEEE International Conference on Advances in Science, Engineering and Robo-tics Technology, 2019. |
| 27 | 封硕, 郑宝娟, 陈文兴, 等. 支持强化学习RNSGA-Ⅱ算法在航迹规划中应用[J]. 计算机工程与应用, 2020, 56 (3): 246- 251. |
| FENG S , ZHENG B J , CHEN W X , et al. Application of reinforcement learning RNSGA- Ⅱ algorithm in flight path planning[J]. Computer Engineering and Applications, 2020, 56 (3): 246- 251. | |
| 28 | 曾国奇, 赵民强, 刘方圆, 等. 基于网格PRM的无人机多约束航路规划[J]. 系统工程与电子技术, 2016, 38 (10): 2310- 2316. |
| ZENG G Q , ZHAO M Q , LIU F Y , et al. Multi-constraints UAV path planning based on grid PRM[J]. Systems Engineering and Electronics, 2016, 38 (10): 2310- 2316. | |
| 29 | WU X L , XU L , ZHEN R , et al. Bi-directional adaptive A* algorithm toward optimal path planning for large-scale UAV under multi-constraints[J]. IEEE Access, 2020, 8, 85431- 85440. |
| 30 | XU Z Y, TANG J, MENG J S, et al. Experience-driven networking: a deep reinforcement learning based approach[C]//Proc. of the IEEE Conference on Computer Communications, 2018: 1871-1879. |
| 31 | XU Z, LIU X, CHEN Q L. Application of improved Astar algorithm in global path planning of unmanned vehicles[C]//Proc. of the IEEE Chinese Automation Congress, 2019: 2075-2080. |
| [1] | Zijie MA, Yongjun XIE. Dynamic stealth of cruise missile in system combat [J]. Systems Engineering and Electronics, 2022, 44(9): 2826-2831. |
| [2] | Bakun ZHU, Weigang ZHU, Wei LI, Ying YANG, Tianhao GAO. Research on decision-making modeling of cognitive jamming for multi-functional radar based on Markov [J]. Systems Engineering and Electronics, 2022, 44(8): 2488-2497. |
| [3] | Guan WANG, Haizhong RU, Dali ZHANG, Guangcheng MA, Hongwei XIA. Design of intelligent control system for flexible hypersonic vehicle [J]. Systems Engineering and Electronics, 2022, 44(7): 2276-2285. |
| [4] | Lingyu MENG, Bingli GUO, Wen YANG, Xinwei ZHANG, Zuoqing ZHAO, Shanguo HUANG. Network routing optimization approach based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(7): 2311-2318. |
| [5] | Dongzi GUO, Rong HUANG, Hechuan XU, Liwei SUN, Naigang CUI. Research on deep deterministic policy gradient guidance method for reentry vehicle [J]. Systems Engineering and Electronics, 2022, 44(6): 1942-1949. |
| [6] | Mingren HAN, Yufeng WANG. Optimization method for orbit transfer of all-electric propulsion satellite based on reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(5): 1652-1661. |
| [7] | Li HE, Liang SHEN, Hui LI, Zhuang WANG, Wenquan TANG. Survey on policy reuse in reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(3): 884-899. |
| [8] | Bakun ZHU, Weigang ZHU, Wei LI, Ying YANG, Tianhao GAO. Multi-function radar intelligent jamming decision method based on prior knowledge [J]. Systems Engineering and Electronics, 2022, 44(12): 3685-3695. |
| [9] | Qingqing YANG, Yingying GAO, Yu GUO, Boyuan XIA, Kewei YANG. Target search path planning for naval battle field based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(11): 3486-3495. |
| [10] | Bin ZENG, Hongqiang ZHANG, Houpu LI. Research on anti-submarine strategy for unmanned undersea vehicles [J]. Systems Engineering and Electronics, 2022, 44(10): 3174-3181. |
| [11] | Qitian WAN, Baogang LU, Yaxin ZHAO, Qiuqiu WEN. Autopilot parameter rapid tuning method based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(10): 3190-3199. |
| [12] | Bin ZENG, Rui WANG, Houpu LI, Xu FAN. Scheduling strategies research based on reinforcement learning for wartime support force [J]. Systems Engineering and Electronics, 2022, 44(1): 199-208. |
| [13] | Zhiwei JIANG, Yang HUANG, Qihui WU. Anti-interference frequency allocation based on kernel reinforcement learning [J]. Systems Engineering and Electronics, 2021, 43(6): 1547-1556. |
| [14] | Jiayi LIU, Shaohua YUE, Gang WANG, Xiaoqiang YAO, Jie ZHANG. Cooperative evolution algorithm of multi-agent system under complex tasks [J]. Systems Engineering and Electronics, 2021, 43(4): 991-1002. |
| [15] | An YAN, Zhang CHEN, Chaoyang DONG, Kanghui HE. Attitude balance control of two-wheeled robot based on fuzzy reinforcement learning [J]. Systems Engineering and Electronics, 2021, 43(4): 1036-1043. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||