Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (1): 221-233.doi: 10.12305/j.issn.1001-506X.2023.01.26
• Guidance, Navigation and Control • Previous Articles
An intelligent trajectory prediction algorithm of reentry glide target based on control parameter estimation
Mingjie LI, Chijun ZHOU, Humin LEI, Lei SHAO, Changxin LUO
- Air Defense and Anti-Missile College, Air Force Engineering University, Xi'an 710051, China
-
Received:2021-09-09Online:2023-01-01Published:2023-01-03 -
Contact:Chijun ZHOU
CLC Number:
Cite this article
Mingjie LI, Chijun ZHOU, Humin LEI, Lei SHAO, Changxin LUO. An intelligent trajectory prediction algorithm of reentry glide target based on control parameter estimation[J]. Systems Engineering and Electronics, 2023, 45(1): 221-233.
share this article
Fig.1
Rapid generation process of trajectory data"

Fig.2
Weaving skip maneuvering trajectories and variation of attack angle"

Fig.3
Turning equilibrium maneuvering trajectories and variation of attack angle"
Table 1
Setting of simulation parameters"
| 机动模式 | ||||
| a | b | c | ||
| 摆动滑翔 | 幅值/km | l=10 | l=30 | l=50 |
| 频率系数/m-1 | ω=5.00e-07 | ω=5.41e-07 | ω=5.88e-07 | |
| 转弯平衡 | 弧度系数/m-1 | a=2.63e-08 | a=3.13e-08 | a=3.45e-08 |

Fig.4
Variation law of KD, β, KL in turning skip mode"


Fig.5
Variation law of ξv, ξt, ξc in turning skip mode"
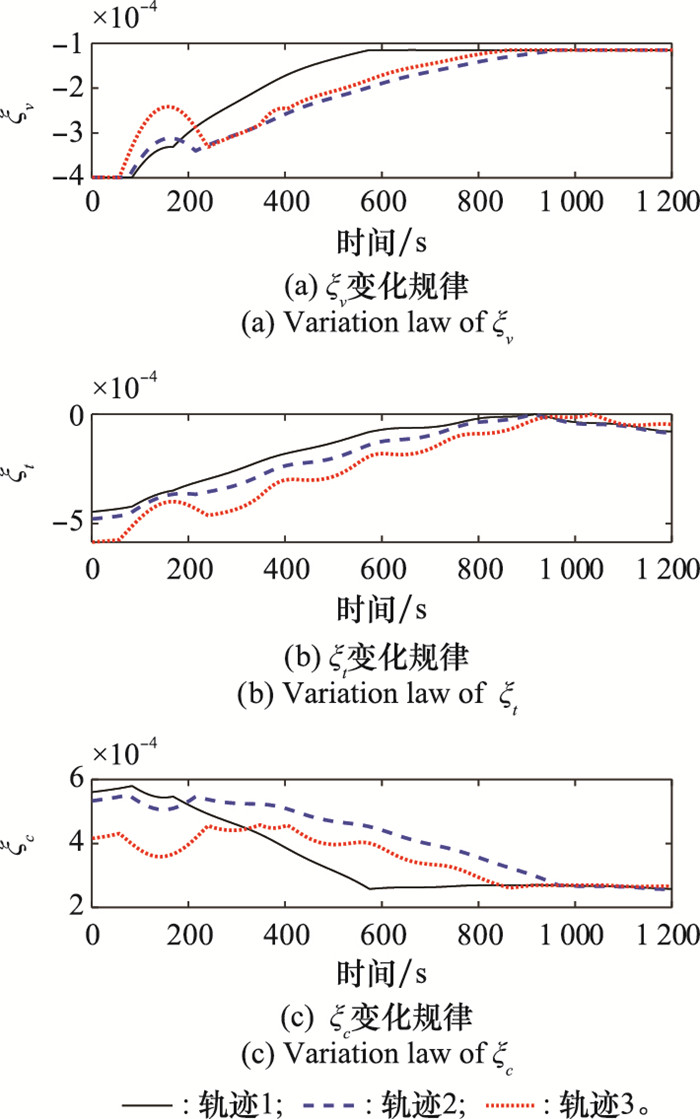
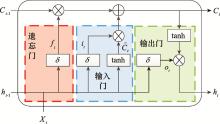
Fig.6
Structure of LSTM network"
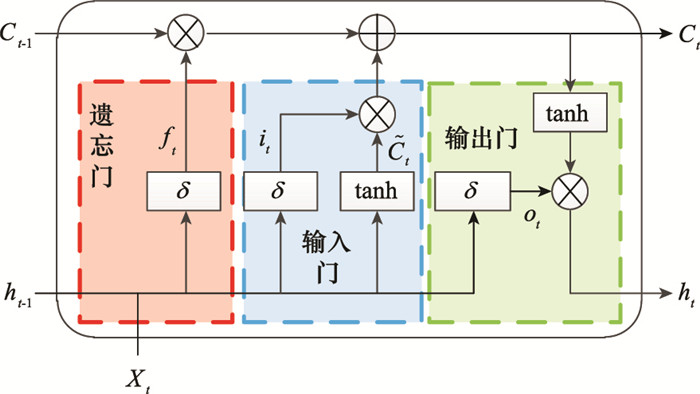

Fig.7
Structure of intelligent trajectory prediction algorithm based on control parameters"


Fig.8
Result of last point modification network"


Fig.9
Filtering and modification result of parameters KD, β, KL"
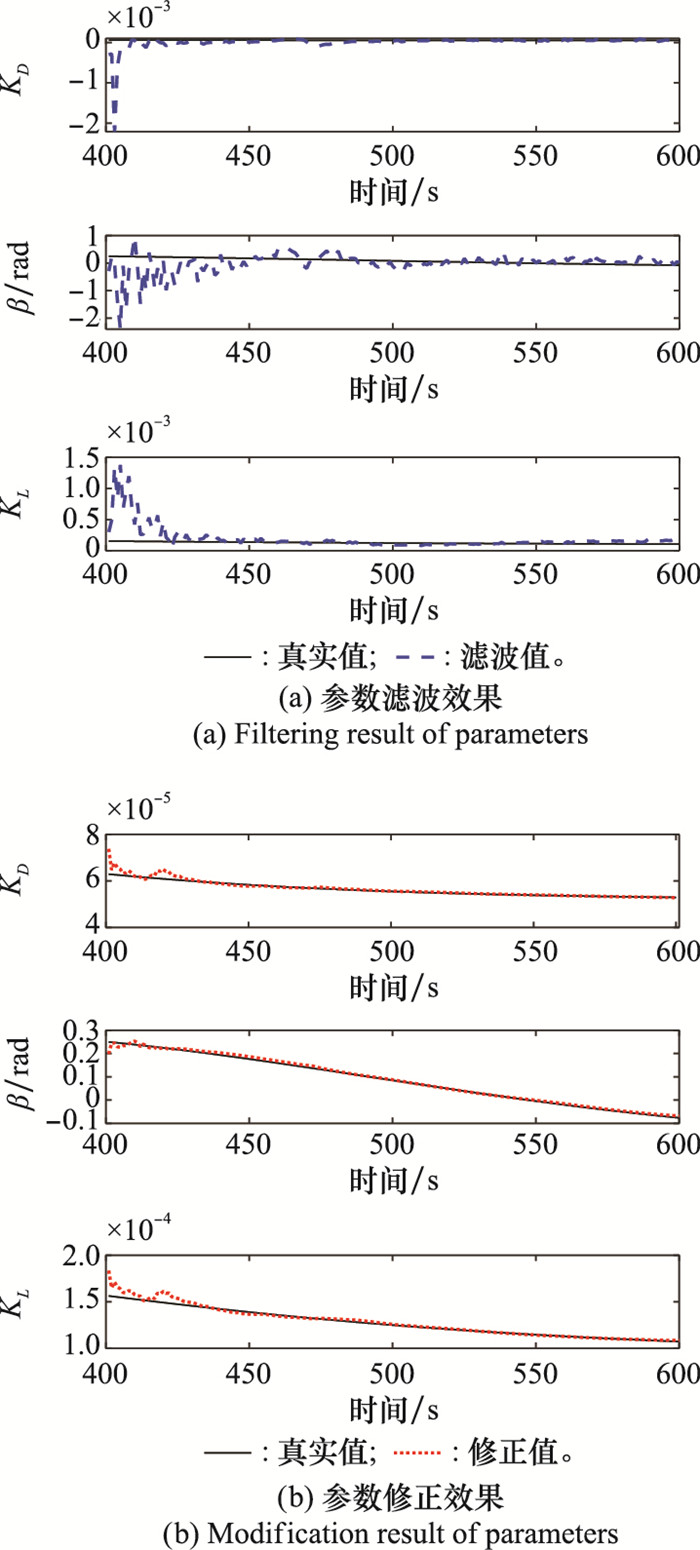

Fig.10
Filtering and modification result of parameters ξv, ξt, ξc"


Fig.11
Comparison result with or without filtering parameters modification network"
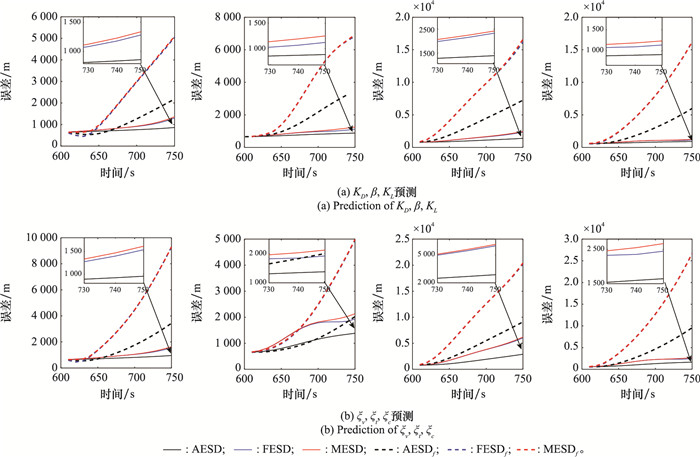
Table 2
Prediction error with or without modification network in 150 s m"
| 机动模式 | LSTM-DBL | LSTM-VTC | |||||||||||||
| 无修正网络 | 有修正网络 | 无修正网络 | 有修正网络 | ||||||||||||
| AESD | FESD | MESD | AESD | FESD | MESD | AESD | FESD | MESD | AESD | FESD | MESD | ||||
| 摆动平衡 | 2 184.70 | 5 057.76 | 5 101.18 | 862.93 | 1 304.57 | 1 360.30 | 3 433.40 | 9 301.19 | 9 302.30 | 958.75 | 1 553.21 | 1 631.40 | |||
| 摆动跳跃 | 3 274.29 | 6 836.88 | 6 932.67 | 884.03 | 1 124.26 | 1 252.08 | 2 024.38 | 4 969.29 | 4 990.14 | 1 384.02 | 1 929.26 | 2 133.39 | |||
| 转弯平衡 | 7 259.84 | 16 194.01 | 16 620.07 | 907.94 | 1 138.51 | 1 236.36 | 9 100.33 | 20 235.87 | 20 417.00 | 1 651.39 | 2 458.24 | 2 682.99 | |||
| 转弯跳跃 | 5 982.49 | 16 194.54 | 16 201.27 | 1 396.78 | 2 354.75 | 2 444.48 | 9 570.43 | 26 667.86 | 26 667.86 | 2 893.55 | 6 037.86 | 6 195.15 | |||
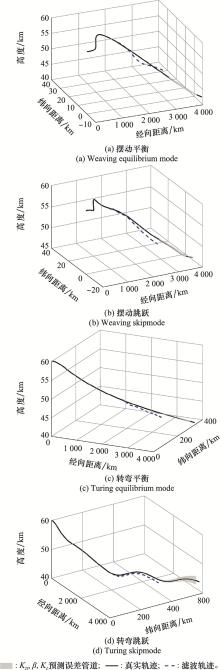
Fig.12
Error pipe of LSTM-DBL"
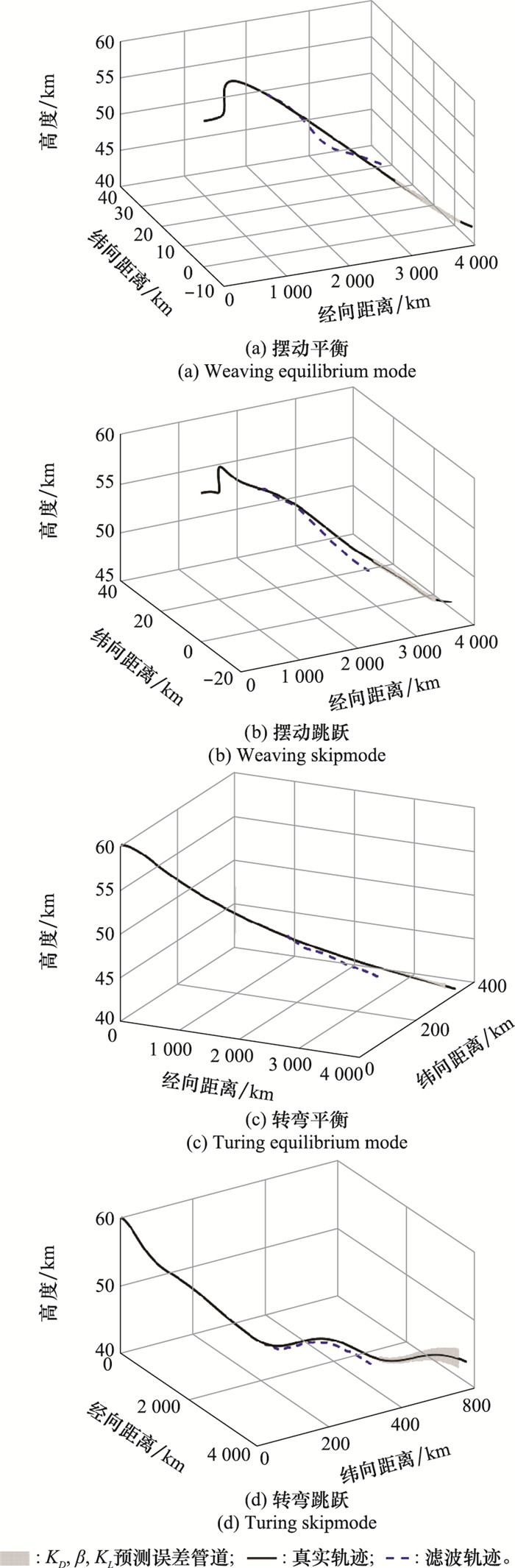
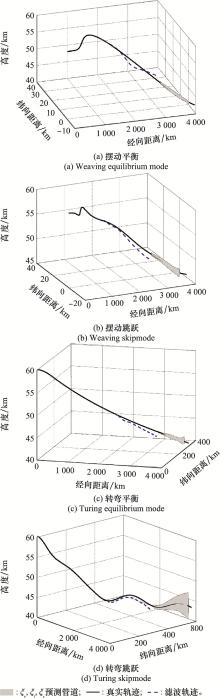
Fig.13
Error pipe of LSTM-VTC"

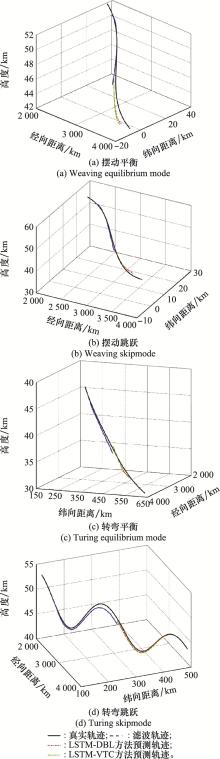
Fig.14
Predicted trajectories in different maneuvering modes with atmospheric density error"
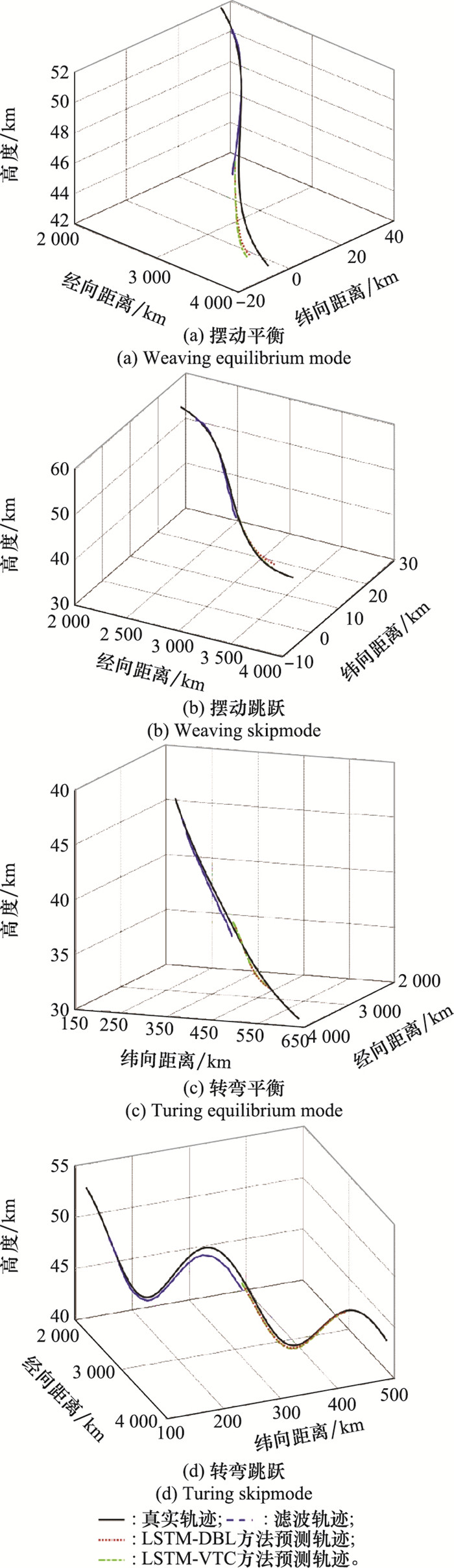
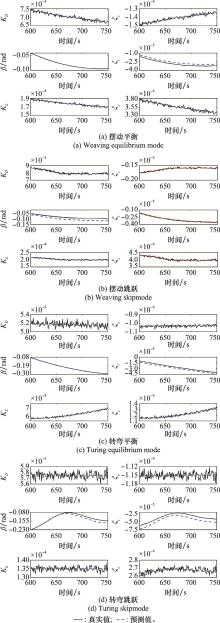
Fig.15
Prediction results of control parameters with atmospheric density error"
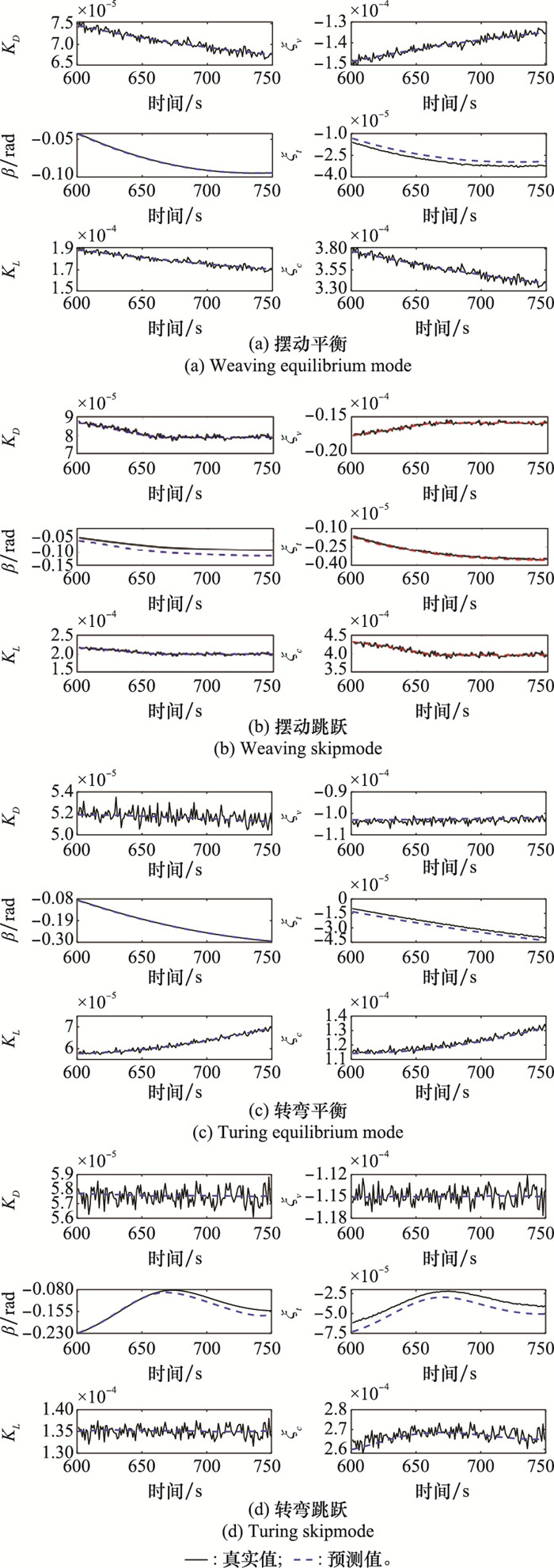
Fig.16
Trajectoris prediction results with different maneuvering modes"
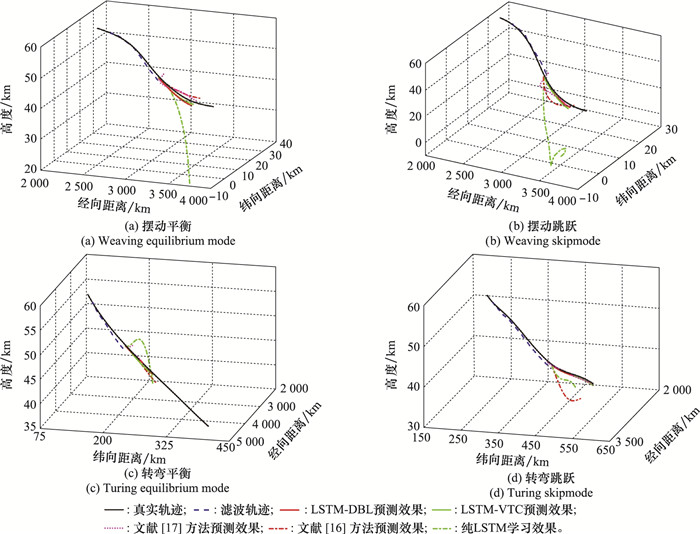
Table 3
Comparison results of different prediction methods"
| 算法 | 机动模式 | |||||
| 摆动平衡 | 摆动跳跃 | 转弯平衡 | 转弯跳跃 | 平均用时/s | ||
| LSTM-VTC | AESD/m | 958.75 | 1 384.02 | 1 651.39 | 2 893.55 | 0.015 3 |
| MESD/m | 1 631.40 | 2 133.39 | 2 682.99 | 6 195.15 | ||
| LSTM-DBL | AESD/m | 862.93 | 884.03 | 907.94 | 1 396.78 | 0.015 6 |
| MESD/m | 1 360.30 | 1 252.08 | 1 236.36 | 2 444.48 | ||
| ξv, ξt, ξc拟合 | AESD/m | 59 248.47 | 50 351.25 | 17 856 336 | 26 832.49 | 0.010 4 |
| MESD/m | 160 146.41 | 129 858.74 | 383 113.43 | 93 577.18 | ||
| KD, β, KL拟合 | AESD/m | 69 138.20 | 44 811.88 | 193 924.60 | 14 935.28 | 0.011 2 |
| MESD/m | 173 555.06 | 99 170.00 | 388 346.18 | 30 292.94 | ||
| 纯LSTM | AESD/m | 4 837.72 | 4 041.20 | 8 633.52 | 3 269.51 | 0.008 5 |
| MESD/m | 8 109.31 | 9 658.73 | 18 070.91 | 13 616.74 | ||
| 1 | XIE Y, LIU L H, TANG G J, et al. A reentry trajectory planning approach satisfying waypoint and no-fly zone constraints[C]//Proc. of the 5th International Conference on Recent Advances in Space Technologies, 2011: 241-246. |
| 2 |
LI F , XIONG J J , LAN X H , et al. Hypersonic vehicle trajectory prediction algorithm based on hough transform[J]. Chinese Journal of Electronics, 2021, 30 (5): 918- 930.
doi: 10.1049/cje.2021.07.003 |
| 3 | LUO C X , LEI H M , LI J , et al. A new adaptive neural control scheme for hypersonic vehicle with actuators multiple constraints[J]. Nonlinear Dynamics, 2020, 100 (3): 529- 553. |
| 4 | FERREIRA L O. Nonlinear dynamics and stability of hypersonic reentry vehicles[D]. Michigan: University of Michigan, 1995. |
| 5 |
CHEN X Q , HOU Z X , LIU J X , et al. Phugoid dynamic characteristic of hypersonic gliding vehicles[J]. Science China: Information Sciences, 2011, 54, 542- 550.
doi: 10.1007/s11432-011-4196-9 |
| 6 | VINH N X, KIM E K, GREENWOOD D T. Second-order analytical solutions for re-entry trajectories[C]//Proc. of the AIAA Atmospheric Flight Mechanic Conference, 1993. |
| 7 | VINH N X, KUO Z S. Improved matched asymptotic solutions for three-dimensional atmospheric skip trajectories[C]//Proc. of the AIAA/AAS Astrodynamic Conference, 1996. |
| 8 |
LU P . Asymptotic analysis of quasi-equilibrium glide in lifting entry flight[J]. Journal of Guidance, Control, and Dynamics, 2006, 29 (3): 662- 670.
doi: 10.2514/1.15789 |
| 9 |
韩春耀, 熊家军. 平衡滑翔高超声速飞行器弹道预测方法[J]. 现代防御技术, 2016, 44 (5): 120- 124.
doi: 10.3969/j.issn.1009-086x.2016.05.020 |
|
HAN C Y , XIONG J J . Prediction algorithm of equilibrium gliding hypersonic vehicle trajectory[J]. Modern Defence Techno-logy, 2016, 44 (5): 120- 124.
doi: 10.3969/j.issn.1009-086x.2016.05.020 |
|
| 10 |
程云鹏, 孙成志, 闫晓东. 基于SVM和EKF的高超声速滑翔飞行器轨迹预报[J]. 北京航空航天大学学报, 2020, 46 (11): 2094- 2105.
doi: 10.13700/j.bh.1001-5965.2020.0050 |
|
CHENG Y P , SUN C Z , YAN X D . Trajectory prediction of hypersonic glide vehicle based on SVM and EKF[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46 (11): 2094- 2105.
doi: 10.13700/j.bh.1001-5965.2020.0050 |
|
| 11 | LIU Y, LI X R. Intent based trajectory prediction by multiple model prediction and smoothing[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2015: AIAA 2015-1324. |
| 12 |
GUILLERMO F , JUAN A B , JAVIER L L . Generation of aircraft intent based on a microstrategy search tree[J]. IEEE Trans.on Intelligent Transportation Systems, 2017, 18 (6): 1405- 1421.
doi: 10.1109/TITS.2016.2606368 |
| 13 |
张凯, 熊家军. 高超声速滑翔飞行器长期轨迹预测问题探讨[J]. 战术导弹技术, 2018, (4): 13- 17.
doi: 10.16358/j.issn.1009-1300.2018.7.216 |
|
ZHANG K , XIONG J J . Discussion on long-term trajectory prediction of hypersonic gliding reentry vehicle[J]. Tactical Missile Technology, 2018, (4): 13- 17.
doi: 10.16358/j.issn.1009-1300.2018.7.216 |
|
| 14 |
张凯, 熊家军, 李凡, 等. 基于意图推断的高超声速滑翔目标贝叶斯轨迹预测[J]. 宇航学报, 2018, 39 (11): 1258- 1265.
doi: 10.3873/j.issn.1000-1328.2018.11.008 |
|
ZHANG K , XIONG J J , LI F , et al. Bayesian trajectory prediction for a hypersonic gliding reentry vehicle based on intent inference[J]. Journal of Astronautics, 2018, 39 (11): 1258- 1265.
doi: 10.3873/j.issn.1000-1328.2018.11.008 |
|
| 15 |
HU Y D , GAO C S , LI J L , et al. Novel trajectory prediction algorithms for hypersonic gliding vehicles based on maneuver mode on-line identification and intent inference[J]. Measurement Science and Technology, 2021, 32 (11): 115012.
doi: 10.1088/1361-6501/ac1284 |
| 16 | 翟岱亮, 雷虎民, 李海宁, 等. 面向轨迹预测的高超声速飞行器气动性能分析[J]. 固体火箭技术, 2017, 40 (1): 115- 120. |
| ZHAI D L , LEI H M , LI H N , et al. Trajectory prediction oriented aerodynamic performances analysis of hypersonic vehicles[J]. Journal of Solid Rocket Technology, 2017, 40 (1): 115- 120. | |
| 17 |
李世杰, 雷虎民, 周池军, 等. 基于控制变量估计的高超声速再入滑翔目标轨迹预测算法[J]. 系统工程与电子技术, 2020, 42 (10): 2320- 2327.
doi: 10.3969/j.issn.1001-506X.2020.10.21 |
|
LI S J , LEI H M , ZHOU C J , et al. Trajectory prediction algorithm for hypersonic reentry gliding target based on control variables estimation[J]. Systems Engineering and Electronics, 2020, 42 (10): 2320- 2327.
doi: 10.3969/j.issn.1001-506X.2020.10.21 |
|
| 18 |
韩春耀, 熊家军, 张凯. 无动力滑翔高超声速飞行器轨迹预测方法[J]. 现代防御技术, 2018, 46 (3): 146- 151.
doi: 10.3969/j.issn.1009-086x.2018.03.022 |
|
HAN C Y , XIONG J J , ZHANG K . Method of trajectory prediction for unpowered gliding hypersonic vehicle[J]. Modern Defence Technology, 2018, 46 (3): 146- 151.
doi: 10.3969/j.issn.1009-086x.2018.03.022 |
|
| 19 |
GERS F A , SCHMIDHUBER J , CUMMINS F . Learning to forget: continual prediction with LSTM[J]. Neural Computation, 2000, 12 (10): 2451- 2471.
doi: 10.1162/089976600300015015 |
| 20 |
LIU K L , PENG Q , SUN H B , et al. A transferred recurrent neural network for battery calendar health prognostics of energy-transportation systems[J]. IEEE Trans.on Industrial Informatics, 2022, 18 (11): 8172- 8181.
doi: 10.1109/TII.2022.3145573 |
| 21 |
XIE G , SHANGGUAN A , FEI R , et al. Motion trajectory prediction based on a CNN-LSTM sequential model[J]. Science China: Information Sciences, 2020, 63, 212207.
doi: 10.1007/s11432-019-2761-y |
| 22 | 谢磊, 丁达理, 魏政磊, 等. AdaBoost-PSO-LSTM网络实时预测机动轨迹[J]. 系统工程与电子技术, 2021, 43 (6): 1651- 1658. |
| XIE L , DING D L , WEI Z L , et al. Real time prediction of maneuver trajectory for AdaBoost-PSO-LSTM[J]. Systems Engineering and Electronics, 2021, 43 (6): 1651- 1658. | |
| 23 | 蔡远利, 邓逸凡, 苏悦华. 高超声速飞行器LSTM弹道分类与预报方法[C]//第21届中国系统仿真技术及其应用学术年会, 2020: 311-315. |
| CAI Y L, DENG Y F, SU Y H. LSTM based trajectory classification and prediction for hypersonic vehicle[C]//Proc. of the 21th China Annual Conference on System Simulation Technology and Application, 2020: 311-315. | |
| 24 |
XIE Y F , ZHUANG X B , XI Z P , et al. Dual-channel and bidirectional neural network for hypersonic glide vehicle trajectory prediction[J]. IEEE Access, 2021, 9, 92913- 92924.
doi: 10.1109/ACCESS.2021.3092515 |
| 25 |
LI G H , ZHANG H B , TANG G J . Flight-corridor analysis for hypersonic glide vehicles[J]. Journal of Aerospace Engineering, 2017, 30 (1): 06016005.
doi: 10.1061/(ASCE)AS.1943-5525.0000667 |
| 26 | LI G H , ZHANG H B , TANG G J . Maneuver characteristics analysis for hypersonic glide vehicles[J]. Aerospace Science and Technology, 2015, 43, 321- 328. |
| 27 | 雍恩米, 唐国金, 陈磊. 基于Gauss伪谱方法的高超声速飞行器再入轨迹快速优化[J]. 宇航学报, 2008, 29 (6): 1766- 1772. |
| YONG E M , TANG G J , CHEN L . Rapid trajectory optimization for hypersonic reentry vehicle via Gauss pseudospectral method[J]. Journal of Astronautics, 2008, 29 (6): 1766- 1772. | |
| 28 | PHILLIPS T H. A common aero vehicle (CAV) model, description, and employment guide[R]. Arlington: Schafer Corporation for AFRL and AFSPC, 2003. |
| 29 | LI S J , LEI H M , SHAO L , et al. Multiple model tracking for hypersonic gliding vehicles with aerodynamic modeling and analysis[J]. IEEE Access, 2019, 7, 28011- 28018. |
| 30 | 韩丁, 盛夏, 尹珊建, 等. 临近空间大气参数误差特性分析[J]. 遥感学报, 2017, 21 (1): 149- 158. |
| HAN D , SHENG X , YIN S J , et al. Deviation characteristics for atmospheric parameters in near space[J]. Journal of Remote Sensing, 2017, 21 (1): 149- 158. |
| [1] | Ruiping JI, Chengyi ZHANG, Yan LIANG, Yuedong WANG. Trajectory prediction of boost-phase ballistic missile based on LSTM [J]. Systems Engineering and Electronics, 2022, 44(6): 1968-1976. |
| [2] | Lei XIE, Dali DING, Zhenglei WEI, Andi TANG, Peng ZHANG. Real time prediction of maneuver trajectory for AdaBoost-PSO-LSTM network [J]. Systems Engineering and Electronics, 2021, 43(6): 1651-1658. |
| [3] | Yuke HU, Wei XIA, Xiaoxuan HU, Haiquan SUN, Yunhui WANG. Vessel trajectory prediction based on recurrent neural network [J]. Systems Engineering and Electronics, 2020, 42(4): 871-877. |
| [4] | Hongpeng ZHANG, Changqiang HUANG, Yongbo XUAN, Shangqin TANG. Real-time prediction of air combat flight trajectory using GRU [J]. Systems Engineering and Electronics, 2020, 42(11): 2546-2552. |
| [5] | Guanglei MENG, Mingzhe ZHOU, Haiyin PIAO, Huimin ZHANG. Threat assessment method of dual-aircraft formation based on cooperative tactical recognition [J]. Systems Engineering and Electronics, 2020, 42(10): 2285-2293. |
| [6] | Shijie LI, Humin LEI, Chijun ZHOU, Tao ZHANG. Trajectory prediction algorithm for hypersonic reentry gliding target based on control variables estimation [J]. Systems Engineering and Electronics, 2020, 42(10): 2320-2327. |
| [7] | ZHANG Bolun, ZHOU Di, WU Shikai. Maneuver model and trajectory prediction of near space hypersonic aircraft [J]. Systems Engineering and Electronics, 2019, 41(9): 2072-2079. |
| [8] | HU Zhiheng, ZHOU Di, ZOU Xinguang. Guidance law estimation and trajectory prediction of interceptor missile [J]. Systems Engineering and Electronics, 2018, 40(3): 609-614. |
| [9] | DU Guangyang, ZHENG Xuehe. Trajectory prediction method under the condition of radar cluster targets tracking [J]. Systems Engineering and Electronics, 2018, 40(12): 2683-2688. |
| [10] | HAN Chunyao, XIONG Jiajun, ZHANG Kai, LAN Xuhui. Decomposition ensemble trajectory prediction algorithm for hypersonic vehicle [J]. Systems Engineering and Electronics, 2018, 40(1): 151-158. |
| [11] | ZHU Xiao-hui, ZHANG Jun. Air traffic complexity evaluation method based on probabilistic trajectory prediction [J]. Systems Engineering and Electronics, 2014, 36(2): 300-305. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||