
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (3): 744-753.doi: 10.23919/JSEE.2023.000074
• CONTROL THEORY AND APPLICATION • Previous Articles
Liang WEI1( ), Guiyang ZHANG2(), Ju HUO1,*(), Muyao XUE3()
), Guiyang ZHANG2(), Ju HUO1,*(), Muyao XUE3()
Received:2021-07-30
Online:2023-06-15
Published:2023-06-30
Contact:
Ju HUO
E-mail:weiliangts@163.com;gyzhang@cslg.edu.cn;torch@hit.edu.cn;xuemuyao@163.com
About author:Supported by:Liang WEI, Guiyang ZHANG, Ju HUO, Muyao XUE. Novel camera calibration method based on invariance of collinear points and pole–polar constraint[J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 744-753.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
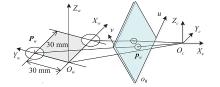
Fig 1
Pinhole imaging model of camera"
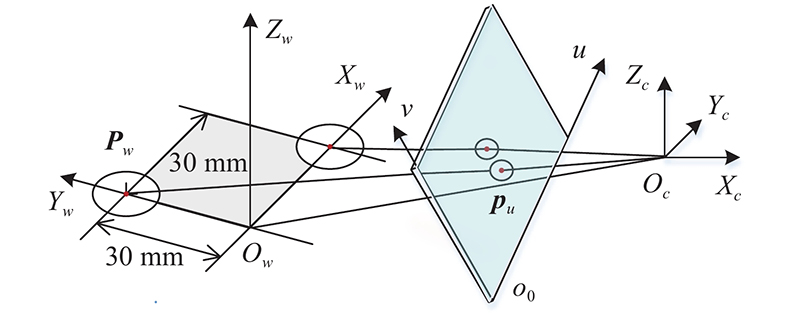
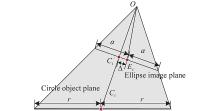
Fig 2
Eccentricity error of circle center"
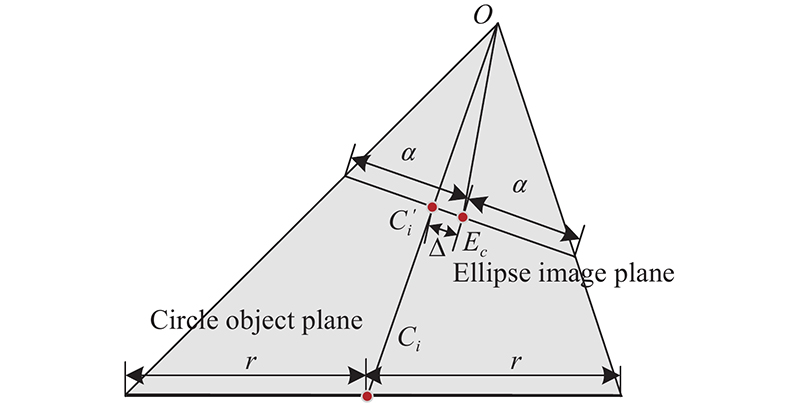
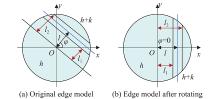
Fig 3
Normalized ideal two-dimsional edge model"
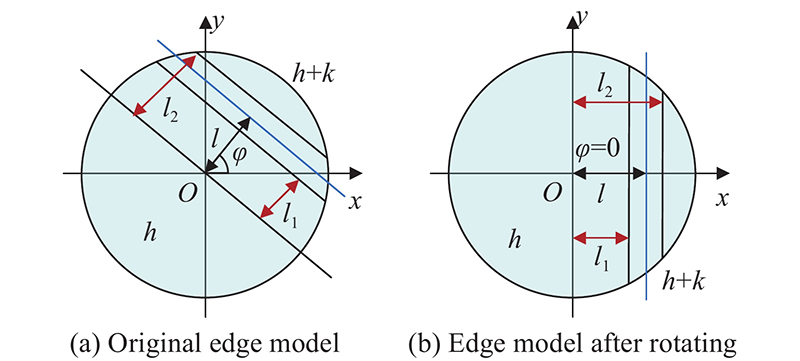
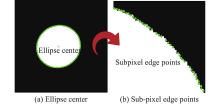
Fig 4
Ellipse extraction"
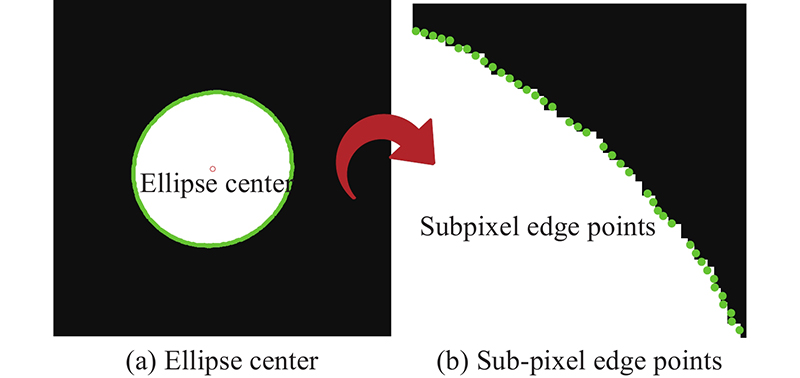

Fig 5
Schematic of concentric circle projection"
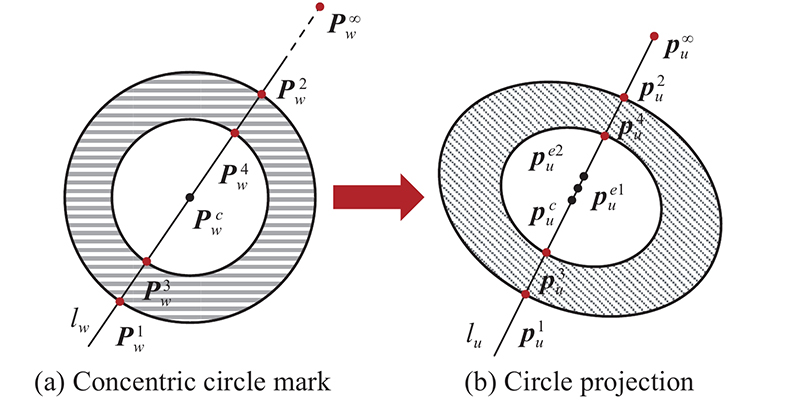
Table 1
Edge and center location accuracy pixel "
| Location accuracy | Gaussian white noise | |||
| | | | ||
| Edge location | Mean error | 0.050 1 | 0.086 7 | 0.106 4 |
| Variance | 0.019 8 | 0.030 7 | 0.251 2 | |
| Fitting center | Coordinate deviation | (0.036 1,0.022 3) | (0.041 4,0.014 2) | (0.054 1,0.012 1) |
| Distance error | 0.042 4 | 0.043 7 | 0.055 4 | |
Fig 6
Influence of rotation angle"
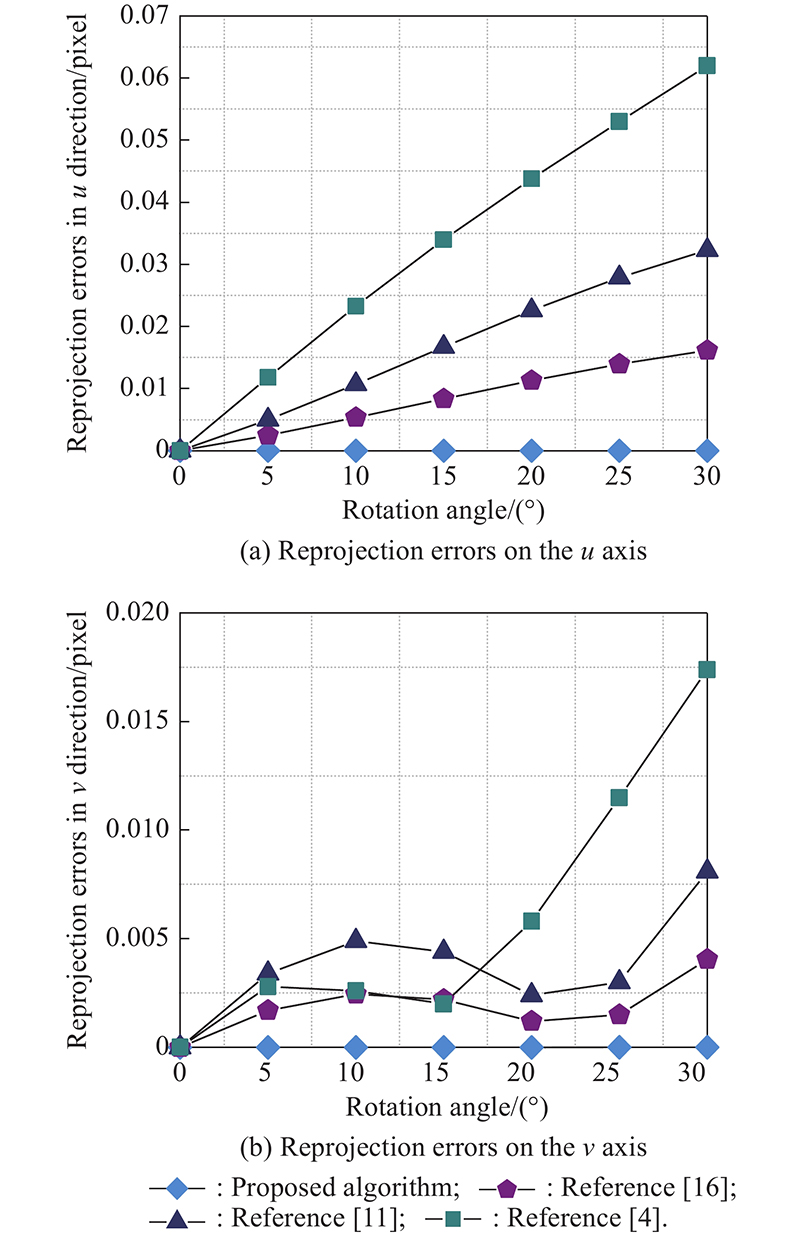

Fig 7
Influence of noise"
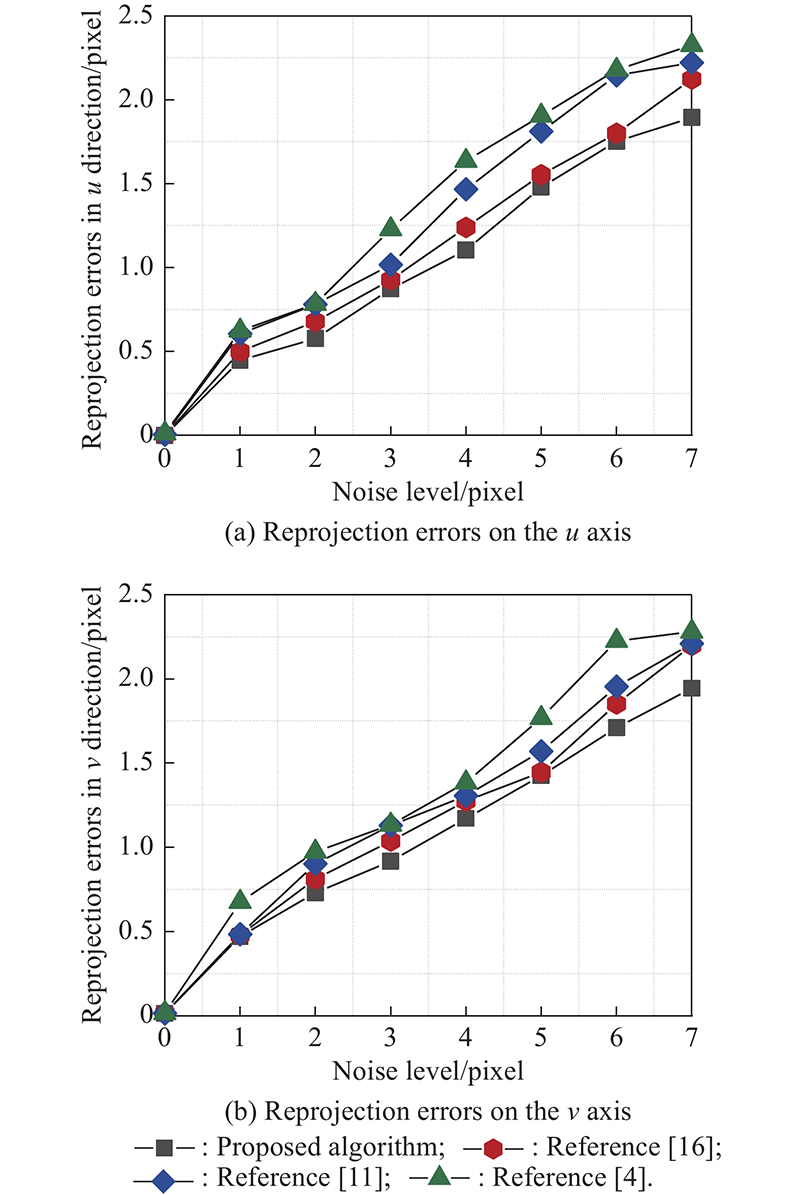
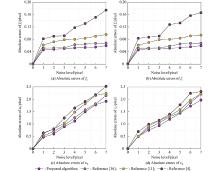
Fig 8
Absolute errors for the four intrinsic parameters"
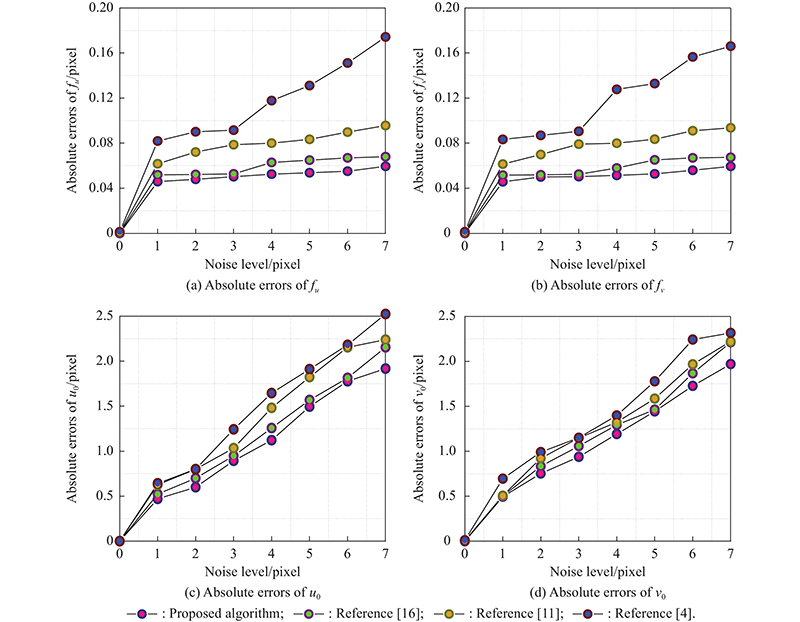
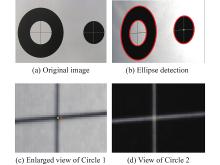
Fig 9
Center location in real images"
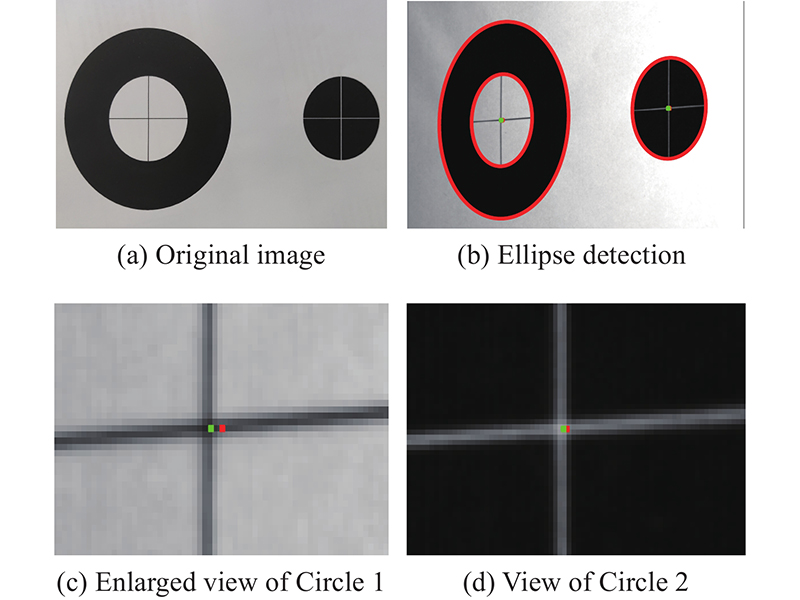
Table 2
Edge and center of ellipse in perspective projection pixel "
| No. | Concentric circle | Circle | |
| 1 | (257.290 6,194.163 7) | (323.476 4,124.467) | (512.191 6,162.626 9) |
| 2 | (271.942 6,250.243) | (167.923 6,465.429 1) | (493.319 5,203.224 7) |
| 3 | (264.001,209.842 4) | (104.484 9,407.255 9) | (641.911 8,276.296 5) |
| 4 | (271.023 2,238.535 9) | (75.152 5,328.070 5) | (532.757 7,333.176 6) |
| 5 | (154.277 3,205.306 3) | (77.085 3,339.652 8) | (496.89,284.526 3) |
| 6 | (154.246 5,323.018 9) | (125.408 1,98.222 5) | (495.664 8,195.235 5) |
| 7 | (254.684,323.241 9) | (71.091 6,246.484 7) | (582.305 7,341.247 5) |
| 8 | (271.209 8,266.330 4) | (335.611 1,151.473 6) | (624.006 5,311.547 3) |
| 9 | (251.659 8,185.683 3) | (278.431,68.076 5) | (648.944 3,232.622 3) |
| 10 | (256.611 4,193.771 9) | (172.061,58.068 8) | (648.098 7,248.539 1) |
| 11 | (265.711 1,297.18) | (280.737 5,69.936 6) | (547.235 5,131.304 5) |
| 12 | (239.580 8,343.049 2) | (340.899 7,167.243 1) | (611.235 5,325.248 7) |
| 13 | (176.241 6,349.518 3) | (348.717 8,208.216 4) | (640.550 6,280.305 7) |
| 14 | (141.679 8,274.278 6) | (172.476 4,467.438 8) | (595.547 3,128.567 3) |
| 15 | (164.932,187.213) | (91.644 1,155.172 6) | (646.799 1,203.622 3) |
| Ellipse center | (208.121 5,259.962 1) | (211.052,259.932 8) | (570.910 1,234.413 2) |
Table 3
Center location result pixel "
| Center location | Proposed method | Traditional method |
| Concentric circle | (205.208 9,260.007 9) | (207.490 1,259.991 4) |
| Circle | (568.737 4,234.347 4) | (569.448 1,234.332 8) |
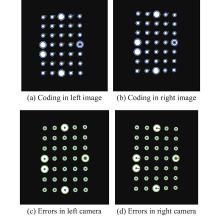
Fig 10
Coding results and the error compensation"
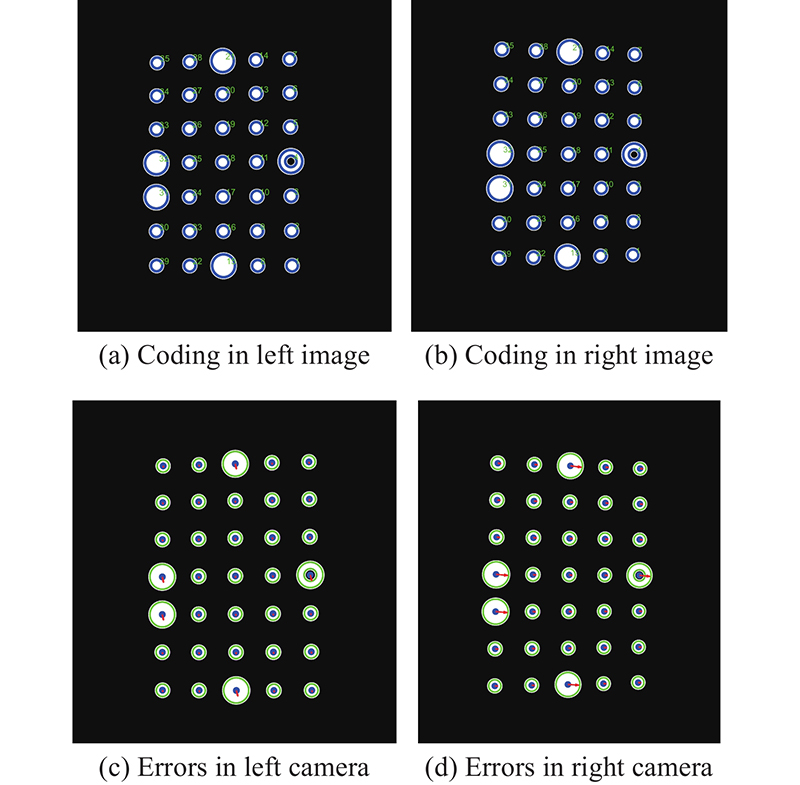
Table 4
Comparison of camera intrinsic parameters pixel "
| Parameter | Method | |
| Proposed | Traditional | |
| Left camera | | |
| | | |
| | | |
| | | |
| Right camera | | |
| | | |
| | | |
| | | |

Fig 11
Reprojection error distribution in image space"
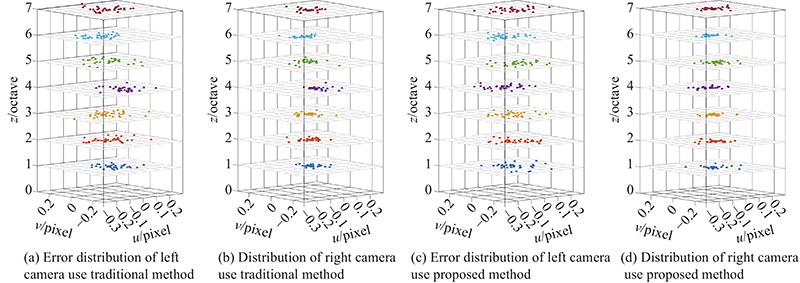
Table 5
Error of standard ruler measurement mm "
| Parameter | Method | |
| Traditional | Proposed | |
| Measuring distance | 119.914 7 | 119.97 |
| Absolute error | 0.085 3 | 0.03 |
| 1 |
ZHANG J, ZHU J, DENG H X, et al Multi-camera calibration method based on a multi-plane stereo target. Applied Optics, 2019, 58 (34): 9353- 9359.
doi: 10.1364/AO.58.009353 |
| 2 |
HUO J, LI Y H, YANG M Multi-camera calibration method based on minimizing the difference of reprojection error vectors. Journal of Systems Engineering and Electronics, 2018, 29 (4): 844- 853.
doi: 10.21629/JSEE.2018.04.19 |
| 3 |
HUANG B, SUN Y R, ZHU Y F, et al Vision pose estimation from planar dual circles in a single image. Optik, 2016, 127 (10): 4275- 4280.
doi: 10.1016/j.ijleo.2016.01.122 |
| 4 |
ZHANG Z Y A flexible new technique for camera calibration. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2000, 22 (11): 1330- 1334.
doi: 10.1109/34.888718 |
| 5 |
ZHAO Z J, LIU Y C Applications of projected circle centers in camera calibration. Machine Vision and Applications, 2010, 21 (3): 301- 307.
doi: 10.1007/s00138-008-0162-y |
| 6 |
YANG F L, ZHAO Y, WANG X C Two separate circles with same-radius: projective geometric properties and applicability in camera calibration. IEEE Access, 2020, 8, 16795- 16806.
doi: 10.1109/ACCESS.2020.2963884 |
| 7 |
LIANG S X, ZHAO Y Camera calibration based on the common pole-polar properties between two coplanar circles with various positions. Applied Optics, 2020, 59 (17): 5167- 5178.
doi: 10.1364/AO.388109 |
| 8 |
WANG Z P, CHEN D R, GONG J L, et al Fast high-precision ellipse detection method. Pattern Recognition, 2021, 111, 107741.
doi: 10.1016/j.patcog.2020.107741 |
| 9 |
THURNHOFER-HEMSI K, LOPEZ-RUBIO E, BLAZQUEZ-PARRA E B, et al Ellipse fitting by spatial averaging of random ensembles. Pattern Recognition, 2020, 106, 107406.
doi: 10.1016/j.patcog.2020.107406 |
| 10 | LU C S, XIA S Y, SHAO M, et al Arc-support line segments revisited: an efficient high-quality ellipse detection. IEEE Trans. on Image Processing, 2019, 29, 768- 781. |
| 11 |
XIE Z X, WANG X M Research on extraction algorithm of projected circular centers of marked points on the planar calibration targets. Optics and Precision Engineering, 2019, 27 (2): 440- 449.
doi: 10.3788/OPE.20192702.0440 |
| 12 | GUO Y B, YAO Y, DI X G Subpixel location algorithm for circle target center based on spatial moment. Journal of Jilin University, 2009, 39 (1): 160- 163. |
| 13 |
SHEN Y J, ZHANG X, CHENG W, et al Quasi-eccentricity error modeling and compensation in vision metrology. Measurement Science and Technology, 2018, 29 (4): 045006.
doi: 10.1088/1361-6501/aaa5e7 |
| 14 |
SU S, LUO Y, YANG K K, et al A novel camera calibration method based on multilevel-edge-fitting ellipse-shape danalytical model. IEEE Sensors Journal, 2020, 20 (11): 5818- 5826.
doi: 10.1109/JSEN.2020.2972615 |
| 15 |
CUI J S, HUO J, YANG M The circular mark projection error compensation in camera calibration. Optik, 2015, 126 (20): 2458- 2463.
doi: 10.1016/j.ijleo.2015.06.017 |
| 16 |
LI Y H, HUO J, YANG M, et al Algorithm of locating the sphere center imaging point based on novel edge model and Zernike moments for vision measurement. Journal of Modern Optics, 2019, 66 (2): 218- 227.
doi: 10.1080/09500340.2018.1515377 |
| 17 |
AHN S J, WARNECKE H J, KOTOWSKI R Systematic geometric image measurement errors of circular object targets: mathematical formulation and correction. The Photogrammetric Record, 1999, 16 (93): 485- 502.
doi: 10.1111/0031-868X.00138 |
| 18 |
ZHU W D, CAO L H, MEI B, et al Calibration of industrial cameras using asymmetric circle center projection. Optics and Precision Engineering, 2014, 22 (8): 2267- 2273.
doi: 10.3788/OPE.20142208.2267 |
| 19 |
LU X D, XUE J P, ZHANG Q C High camera calibration method based on true coordinate computation of circle center. Chinese Journal of Lasers, 2020, 47 (3): 0304008.
doi: 10.3788/CJL202047.0304008 |
| 20 | LIU Q, SU H. Correction of the asymmetrical circular projection in DLT camera calibration. Proc. of the Conference on Image and Signal Processing, 2008: 344−348. |
| 21 | WEI Z Z, ZHANG G J A distortion error model of the perspective projection of ellipse center and its simulation. Chinese Journal of Scientific Instrument, 2003, 24 (2): 160- 164. |
| 22 | DAI D C, YAO M L, JIN W, et al Optimum design of sparse concentric rings array. Systems Engineering and Electronics, 2018, 40 (4): 739- 745. |
| 23 | BU L B, HUO H T, LIU X Y, et al Concentric circle grids for camera calibration with considering lens distortion. Optics and Lasers in Engineering, 2021, 140 (11): 106527. |
| 24 | WU J F, LIU G X. Nonmetric calibration of camera lens distortion using concentric circles pattern. Proc. of the Conference on Mechanic Automation and Control Engineering, 2010: 3338−3341. |
| 25 |
HE D, LIU X L, PENG X, et al Eccentricity error identification and compensation for high-accuracy 3D optical measurement. Measurement Science and Technology, 2013, 24 (7): 075402.
doi: 10.1088/0957-0233/24/7/075402 |
| 26 | AN J J, GAO N, CHEN C, et al Correcting method and evaluation of eccentricity error of circle target. Laser & Optoelectronics Progress, 2017, 54 (4): 041203. |
| 27 |
YANG S R, LIU M, YIN S B, et al An improved method for location of concentric circles in vision measurement. Measurement, 2017, 100, 243- 251.
doi: 10.1016/j.measurement.2016.12.045 |
| 28 |
ZHANG B W, LI Y F, CHEN S Y Concentric-circle-based camera calibration. IET Image Processing, 2012, 6 (7): 870- 876.
doi: 10.1049/iet-ipr.2011.0421 |
| [1] | Ju HUO, Yunhui LI, Ming YANG. Multi-channel signal parameters joint optimization for GNSS terminals [J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 844-853. |
| [2] |
Meng An*, Zhiguo Jiang, Danpei Zhao.
High speed robust image registration and localization using optimized algorithm and its performances evaluation [J]. Journal of Systems Engineering and Electronics, 2010, 21(3): 520-526. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||