
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (3): 775-782.doi: 10.23919/JSEE.2023.000071
• CONTROL THEORY AND APPLICATION • Previous Articles
Dakai LIU( ), Sven ESCHE()
), Sven ESCHE()
Received:2021-09-06
Online:2023-06-15
Published:2023-06-30
Contact:
Dakai LIU
E-mail:dliu18@stevens.edu;SEsche@stevens.edu
About author:Dakai LIU, Sven ESCHE. Revised barrier function-based adaptive finite- and fixed-time convergence super-twisting control[J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 775-782.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
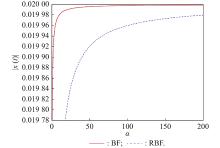
Fig 1
Comparison of the change of $\left| {\boldsymbol{x}} \right|$ between BF and RBF ( ${\boldsymbol{\delta}} {\boldsymbol{=}} {\boldsymbol{0.02}}$ , $\bar{\boldsymbol{ F}} {\boldsymbol{=}} {\boldsymbol{0.01}}$ , ${\boldsymbol{m}} {\boldsymbol{=}} {\boldsymbol{20}}$ ) "
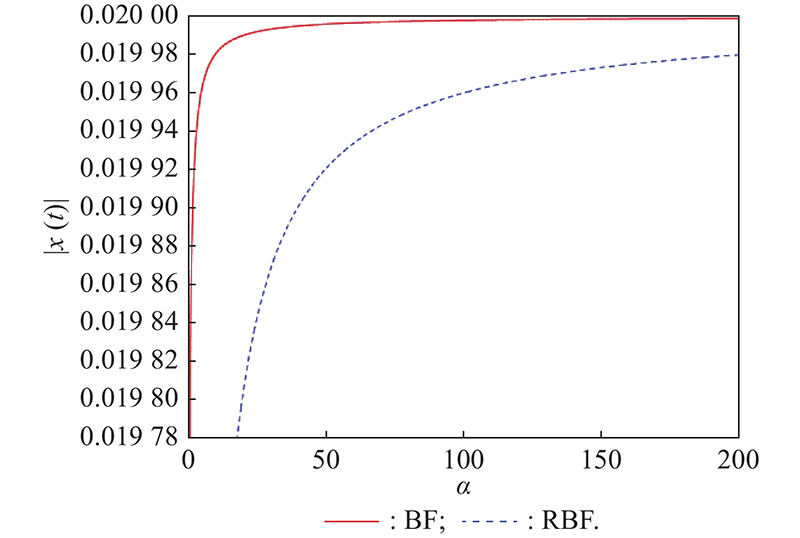
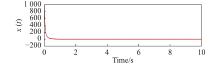
Fig 2
Plot of ${\boldsymbol{x}}$ with proposed control corresponding to ${\boldsymbol{x}}({\boldsymbol{0}}) = {{\boldsymbol{10}}^{\boldsymbol{3}}}$ "
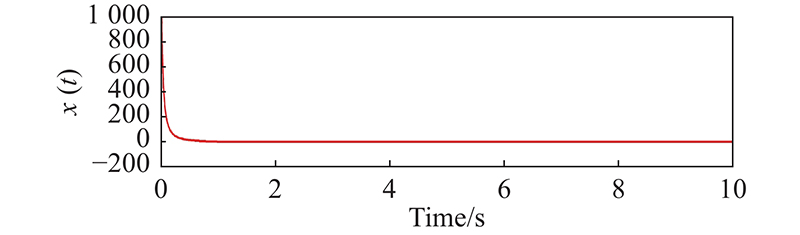
Fig 3
Zoomed-in plot of ${\boldsymbol{x}}$ with proposed control corresponding to ${\boldsymbol{x}}({\boldsymbol{0}}) = {{\boldsymbol{10}}^{\boldsymbol{3}}}$ "
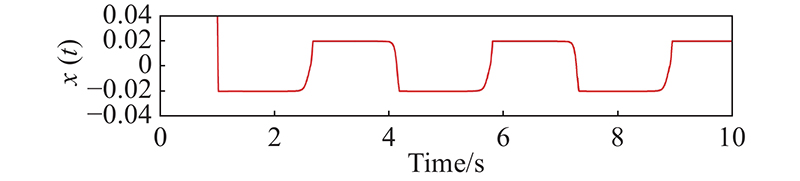
Fig 4
Plot of ${\boldsymbol{y}}$ with proposed control corresponding to ${\boldsymbol{x}}({\boldsymbol{0}}) = {{\boldsymbol{10}}^{\boldsymbol{3}}}$ "
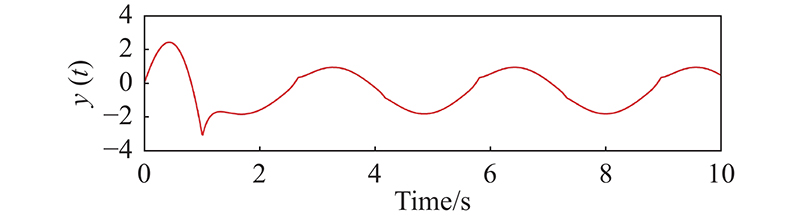
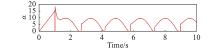
Fig 5
Plot of ${\boldsymbol{\alpha}}$ with proposed control corresponding to ${\boldsymbol{x}}({\boldsymbol{0}}) = {{\boldsymbol{10}}^{\boldsymbol{3}}}$ "
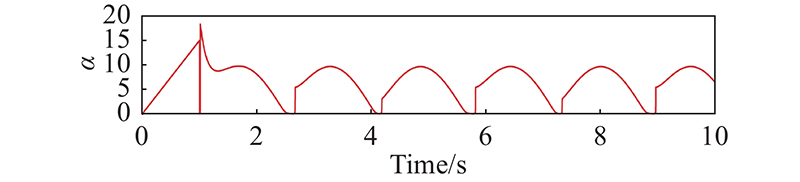
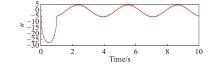
Fig 6
Plot of ${\boldsymbol{ u}}$ with proposed control corresponding to ${\boldsymbol{x}}({\boldsymbol{0}}) = {{\boldsymbol{10}}^{\boldsymbol{3}}}$ "
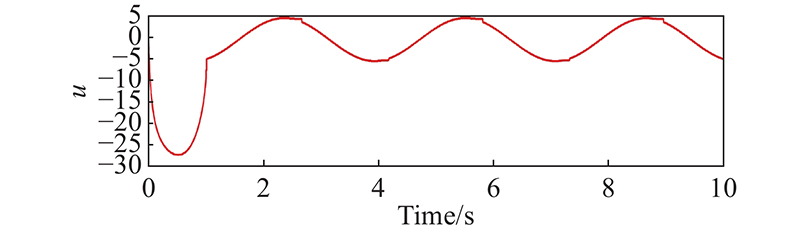
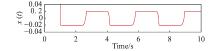
Fig 7
Zoomed-in plot of ${\boldsymbol{x}}$ with proposed control corresponding to ${\boldsymbol{x}}({\boldsymbol{0}}) = {{\boldsymbol{10}}^{\boldsymbol{6}}}$ "
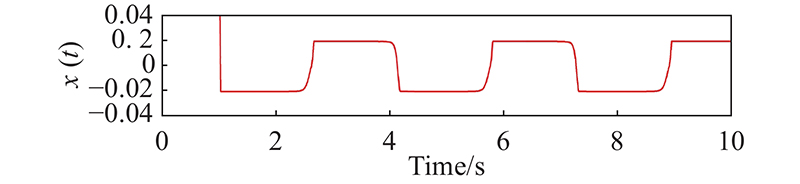
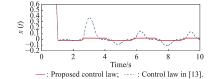
Fig 8
Comparison of plots of ${\boldsymbol{x}}$ under the two control laws corresponding to ${\boldsymbol{x}}({\boldsymbol{0}}) = {{\boldsymbol{10}}^{\boldsymbol{6}}}$ "
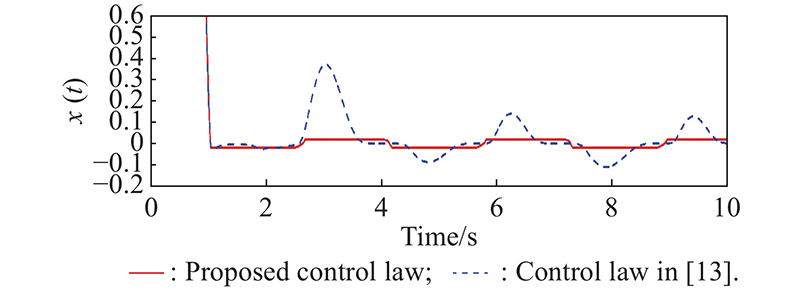
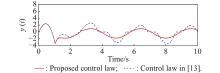
Fig 9
Comparison of plots of ${\boldsymbol{y}}$ under the two control laws corresponding to ${\boldsymbol{x}}({\boldsymbol{0}}) = {{\boldsymbol{10}}^{\boldsymbol{6}}}$ "
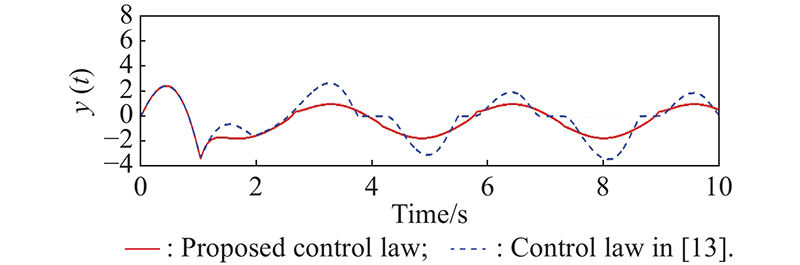
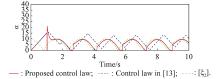
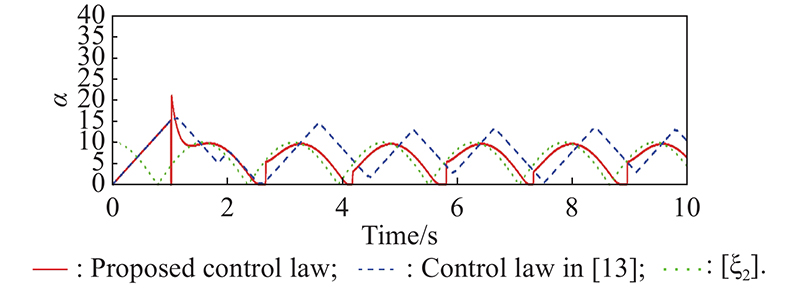
Fig 10
Comparison of plots of gain ${\boldsymbol{\alpha}}$ under the two control laws corresponding to ${\boldsymbol{x}}({\boldsymbol{0}}) = {{\boldsymbol{10}}^{\boldsymbol{6}}}$ "
| 1 | EDWARDS C, SPURGEON S. Sliding mode control: theory and applications. Florida: CRC Press, 1998. |
| 2 | UTKIN V I. Sliding modes in optimization and control problems. New York: Springer Verlag, 1992. |
| 3 |
EDWARDS C, SHTESSEL Y B Enhanced continuous higher order sliding mode control with adaptation. Journal of the Franklin Institute, 2019, 356 (9): 4773- 4784.
doi: 10.1016/j.jfranklin.2018.12.026 |
| 4 |
UTKIN V I, POZNYAK A S Adaptive sliding mode control with application to super-twist algorithm: equivalent control method. Automatica, 2013, 49, 39- 47.
doi: 10.1016/j.automatica.2012.09.008 |
| 5 |
SHTESSEL Y B, SHKOLNIKOV I A, LEVANT A Smooth second-order sliding modes: missile guidance application. Automatica, 2007, 43, 1470- 1476.
doi: 10.1016/j.automatica.2007.01.008 |
| 6 |
LIU D K, ESCHE S, WANG M G An adaptive super-twisting algorithm based on conditioning technique. Transactions of the Institute of Measurement and Control, 2022, 44 (2): 497- 505.
doi: 10.1177/01423312211040317 |
| 7 | SHTESSEL Y B, MORENO J A, PLESTAN F, et al. Super-twisting adaptive sliding mode control: a Lyapunov design. Proc. of the 49th IEEE Conference on Decision and Control, 2010: 5109−5113. |
| 8 |
EDWARDS C, SHTESSEL Y B Adaptive dual-layer super-twisting control and observation. International Journal of Control, 2016, 89 (9): 1759- 1766.
doi: 10.1080/00207179.2016.1175030 |
| 9 |
EDWARDS C, SHTESSEL Y B Adaptive continuous higher order sliding mode control. Automatica, 2016, 65, 183- 190.
doi: 10.1016/j.automatica.2015.11.038 |
| 10 | OLIVEIRA T R, CUNHA J P V, HSU L. Adaptive sliding mode control for disturbances with unknown bounds. Proc. of the 14th International Workshop on Variable Structure Systems, 2016: 59−64. |
| 11 |
TIAN B L, CUI J, LU H C, et al Adaptive finite-time attitude tracking of quadrotors with experiments and comparisons. IEEE Trans. on Industrial Electronics, 2019, 66, 9428- 9438.
doi: 10.1109/TIE.2019.2892698 |
| 12 |
NEGRETE-CHAVEZ D Y, MORENO J A Second-order sliding mode output feedback controller with adaptation. International Journal of Adaptive Control and Signal Processing, 2016, 30 (8−10): 1523- 1543.
doi: 10.1002/acs.2662 |
| 13 |
BASIN M, PANATHULA C B, SHTESSEL Y Adaptive uniform finite-/fixed-time convergent second-order sliding-mode control. International Journal of Control, 2016, 89 (9): 1777- 1787.
doi: 10.1080/00207179.2016.1184759 |
| 14 |
PLESTAN F, SHTESSEL Y, BREGEAULT V, et al New methodologies for adaptive sliding mode control. International Journal of Control, 2010, 83 (9): 1907- 1919.
doi: 10.1080/00207179.2010.501385 |
| 15 |
SHTESSEL Y, TALEB M, PLESTAN F A novel adaptive-gain supertwisting sliding mode controller: methodology and application. Automatica, 2012, 48, 759- 769.
doi: 10.1016/j.automatica.2012.02.024 |
| 16 | OBEID H, FRIDMAN L, LAGHROUCHE S, et al. Barrier function-based adaptive twisting controller. Proc. of the 15th International Workshop on Variable Structure Systems, 2018: 198−202. |
| 17 |
OBEID H, FRIDMAN L, LAGHROUCHE S, et al Adaptation of Levant’s differentiator based on barrier function. International Journal of Control, 2018, 91 (9): 2019- 2027.
doi: 10.1080/00207179.2017.1406149 |
| 18 |
OBEID H, FRIDMAN L M, LAGHROUCHE S, et al Barrier function-based adaptive sliding mode control. Automatica, 2018, 93, 540- 544.
doi: 10.1016/j.automatica.2018.03.078 |
| 19 |
OBEID H, LAGHROUCHE S, FRIDMAN L, et al Barrier function-based variable gain super-twisting controller. IEEE Trans. on Automatic Control, 2020, 65, 4928- 4933.
doi: 10.1109/TAC.2020.2974390 |
| 20 | OBEID H, LAGHROUCHE S, FRIDMAN L. A barrier function based-adaptive super-twisting controller for wind energy conversion system. Proc. of the 58th Conference on Decision and Control, 2019: 7869−7874. |
| 21 |
BASIN M, RODRIGUEZ-RAMIREZ P, DING S X, et al Continuous fixed-time convergent regulator for dynamic systems with unbounded disturbances. Journal of the Franklin Institute, 2018, 355 (5): 2762- 2778.
doi: 10.1016/j.jfranklin.2018.01.010 |
| 22 |
BASIN M Finite-and fixed-time convergent algorithms: Design and convergence time estimation. Annual Reviews in Control, 2019, 48, 209- 221.
doi: 10.1016/j.arcontrol.2019.05.007 |
| 23 | BASIN M, PANATHULA C B, SHTESSEL Y Multivariable continuous fixed-time second-order sliding mode control: design and convergence time estimation. IET Control Theory & Applications, 2017, 11 (8): 1104- 1111. |
| 24 |
BASIN M, SHTESSEL Y, ALDUKALI F Continuous finite-and fixed-time high-order regulators. Journal of the Franklin Institute, 2016, 353 (18): 5001- 5012.
doi: 10.1016/j.jfranklin.2016.09.026 |
| 25 |
BASIN M, RODRIGUEZ-RAMIREZ P, GARZA-ALONSO A Continuous fixed-time convergent super-twisting algorithm in case of unknown state and disturbance initial conditions. Asian Journal of Control, 2019, 21 (1): 323- 338.
doi: 10.1002/asjc.1924 |
| 26 | FILIPPOV A F. Differential equations with discontinuous righthand sides: control systems. Berlin: Springer Science & Business Media, 2013. |
| [1] | Fan WANG, Pengfei FAN, Yonghua FAN, Bin XU, Jie YAN. Robust adaptive control of hypersonic vehicle considering inlet unstart [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 188-196. |
| [2] |
Zhaoying LI, Shuai SHI, Hao LIU.
Trajectory tracking of tail-sitter aircraft by |
| [3] | Fuhui GUO, Pingli LU. Fast self-adapting high-order sliding mode control for a class of uncertain nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 690-699. |
| [4] | Yang LI, Mingyong LIU, Xiaojian ZHANG, Xingguang PENG. Global approximation based adaptive RBF neural network control for supercavitating vehicles [J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 797-804. |
| [5] | Ri Liu, Xiuxia Sun, Wenhan Dong, and Dong Wang. Finite-time adaptive sliding mode control for heavyweight airdrop operations [J]. Systems Engineering and Electronics, 2017, 28(2): 338-346. |
| [6] | Jiaoru Huang, Fucai Qian, Guo Xie, and Hengzhan Yang. Robust adaptive control for dynamic systems with mixed uncertainties [J]. Systems Engineering and Electronics, 2016, 27(3): 656-663. |
| [7] | Xuemei Zheng, Peng Li, Haoyu Li, and Danmei Ding. Adaptive backstepping-based NTSM control for unmatched uncertain nonlinear systems [J]. Systems Engineering and Electronics, 2015, 26(3): 557-564. |
| [8] | Yong Guo, Shenmin Song, and Liwei Deng. Finite-time coordination control for formation flying spacecraft [J]. Journal of Systems Engineering and Electronics, 2014, 25(5): 859-867. |
| [9] | Xuelian Yao, Gang Tao, and Ruiyun Qi. Adaptive actuator failure compensation and disturbance rejection scheme for spacecraft [J]. Journal of Systems Engineering and Electronics, 2014, 25(4): 648-. |
| [10] | Lei Li and Zhizhong Mao. Direct adaptive control for a class of MIMO nonlinear discrete-time systems [J]. Journal of Systems Engineering and Electronics, 2014, 25(1): 129-137. |
| [11] | Wenli Sun, Hong Cai, and Fu Zhao. FBFN-based adaptive repetitive control of nonlinearly parameterized systems [J]. Journal of Systems Engineering and Electronics, 2013, 24(6): 1003-1010. |
| [12] | Xunhong Lv, Bin Jiang, Ruiyun Qi, and Jing Zhao. Survey on nonlinear reconfigurable flight control [J]. Journal of Systems Engineering and Electronics, 2013, 24(6): 971-983. |
| [13] | Haibin Sun, Shihua Li, and Changyin Sun. Adaptive fault-tolerant controller design for airbreathing hypersonic vehicle with input saturation [J]. Journal of Systems Engineering and Electronics, 2013, 24(3): 488-. |
| [14] | Xiyuan Huang, Qing Wang, Yali Wang, Yanze Hou, and Chaoyang Dong. Adaptive augmentation of gain-scheduled controller for aerospace vehicles [J]. Journal of Systems Engineering and Electronics, 2013, 24(2): 272-280. |
| [15] | Chunsheng Liu and Shaojie Zhang. Novel robust control framework for morphing aircraft [J]. Journal of Systems Engineering and Electronics, 2013, 24(2): 281-287. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||