Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (6): 1421-1438.doi: 10.23919/JSEE.2021.000121
-
收稿日期:2020-12-22出版日期:2022-01-05发布日期:2022-01-05
UAV cooperative air combat maneuver decision based on multi-agent reinforcement learning
Jiandong ZHANG1( ), Qiming YANG1,*(), Guoqing SHI1(), Yi LU2(), Yong WU1()
), Qiming YANG1,*(), Guoqing SHI1(), Yi LU2(), Yong WU1()
- 1 School of Electronics and Information, Northwestern Polytechnical University, Xi’an 710072, China
2 Shenyang Aircraft Design Institute, Shenyang 110035, China
-
Received:2020-12-22Online:2022-01-05Published:2022-01-05 -
Contact:Qiming YANG E-mail:jdzhang@nwpu.edu.cn;yangqm@nwpu.edu.cn;shiguoqing@nwpu.edu.cn;yiluemail@126.com;yongwu@nwpu.edu.cn -
About author:|ZHANG Jiandong was born in 1974. He is an associate professor at the Department of System and Control Engineering in Northwestern Polytechnical University, China. He received both his M.S. and Ph.D. degrees in system engineering from the same university. His research interests include modeling simulation and effectiveness evaluation of complex systems, development and design of integrated avionics system, and system measurement & test technologies. E-mail:
jdzhang@nwpu.edu.cn ||YANG Qiming was born in 1988. He received his master degree from Northwestern Polytechnical University (NPU), Xi’an, China in 2013. He was awarded with a Ph.D. degree in electronic science and technology in 2020. He is an assistant researcher of the NPU. His main research interests are artificial intelligence and its application on control and decision of UAV. E-mail: yangqm@nwpu.edu.cn|
|SHI Guoqing was born in 1974. He is an associate professor at the Department of System and Control Engineering in Northwestern Polytechnical University, China. He received his M.S. and Ph.D. degrees in system engineering from the same university. His research interests include integrated avionics system measurement & test technologies, development and design of embedded real-time systems, modeling simulation and effectiveness evaluation of complex systems, etc. E-mail:
shiguoqing@nwpu.edu.cn ||LU Yi was born in 1975. He graduated from Nanjing University of Aeronautics and Astronautics in 1998, majoring in aircraft guidance control and simulation. He is currently the deputy chief designer of Shenyang Aircraft Design Institute, and mainly engaged in fighter avionics system design work. E-mail:
yiluemail@126.com ||WU Yong was born in 1964. He is a professor at the Department of System and Control Engineering in Northwestern Polytechnical University, China. He received his M.S. degree in system fire control from the same university in 1988. His research interests include integrated avionics system measurement & test technologies, development and design of embedded real-time systems, modeling simulation and effectiveness evaluation of complex systems, etc. E-mail:
yongwu@nwpu.edu.cn -
Supported by:This work was supported by the Aeronautical Science Foundation of China (2017ZC53033) and the Seed Foundation of Innovation and Creation for Graduate Students in Northwestern Polytechnical University (CX2020156).
引用本文
. [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1421-1438.
Jiandong ZHANG, Qiming YANG, Guoqing SHI, Yi LU, Yong WU. UAV cooperative air combat maneuver decision based on multi-agent reinforcement learning[J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1421-1438.

"

"
"
"

"

"
"
"
"
| Number | Maneuver | Control value | ||
| | | | ||
| 1 | Forward maintain | 0 | 1 | 0 |
| 2 | Forward accelerate | 2 | 1 | 0 |
| 3 | Forward decelerate | ?1 | 0 | 0 |
| 4 | Left turn maintain | 0 | 8 | ?arc cos (1/8) |
| 5 | Left turn accelerate | 2 | 8 | ?arc cos (1/8) |
| 6 | Left turn decelerate | ?1 | 8 | ?arc cos (1/8) |
| 7 | Right turn maintain | 0 | 8 | arc cos (1/8) |
| 8 | Right turn accelerate | 2 | 8 | arc cos (1/8) |
| 9 | Right turn decelerate | ?1 | 8 | arc cos (1/8) |
| 10 | Upward maintain | 0 | 8 | 0 |
| 11 | Upward accelerate | 2 | 8 | 0 |
| 12 | Upward decelerate | ?1 | 8 | 0 |
| 13 | Downward maintain | 0 | 8 | |
| 14 | Downward accelerate | 2 | 8 | |
| 15 | Downward decelerate | ?1 | 8 | |
"
| Initial state | x/m | y/m | z/m | v/(m/s) | | | |
| Training episode | UAV1 | [?200, 200] | [?300, 300] | 3000 | 200 | 0 | [?60, 60] |
| UAV2 | [2500, 3500] | [?500, 500] | 3500 | 200 | 0 | [?60, 60] | |
| Target | [2500, 3500] | [2500, 3500] | [2800, 3800] | [150, 300] | 0 | [?60, 60] | |
| Evaluation episode | UAV1 | 0 | 0 | 3000 | 200 | 0 | 40 |
| UAV2 | 3000 | 0 | 3500 | 200 | 0 | 40 | |
| Target | 3000 | 3000 | 3000 | 220 | 0 | 45 | |
"
"
"
"
| Initial state | x/m | y/m | z/m | v/(m/s) | | | |
| Training episode | UAV1 | [?200, 200] | [?300, 300] | 3000 | 200 | 0 | [?60, 60] |
| UAV2 | [1500, 2500] | [?500, 500] | 3500 | 200 | 0 | [?60, 60] | |
| Target | [1000, 2 000] | [2500, 3500] | [2800, 3800] | [150, 300] | 0 | [120, 240] | |
| Evaluation episode | UAV1 | 0 | 0 | 3000 | 200 | 0 | 0 |
| UAV2 | 2 000 | 0 | 3500 | 200 | 0 | 0 | |
| Target | 1000 | 3000 | 3000 | 220 | 0 | 200 | |
"
"
| Initial State | x/m | y/m | z/m | v/(m/s) | | | |
| Training episode | UAV1 | [?200, 200] | [?300, 300] | 3000 | 200 | 0 | [10, 70] |
| UAV2 | [2800, 3200] | [?300, 300] | 3200 | 200 | 0 | [10, 70] | |
| Target1 | [2500, 3500] | [2500, 3500] | [2900, 3100] | [180, 220] | 0 | [?165, ?105] | |
| Target2 | [5500, 6500] | [2500, 3500] | [2900, 3100] | [180, 220] | 0 | [?165, ?105] | |
| Evaluation episode | UAV1 | 0 | 0 | 3000 | 200 | 0 | 40 |
| UAV2 | 3000 | 0 | 3200 | 200 | 0 | 40 | |
| Target1 | 3000 | 3000 | 3000 | 200 | 0 | ?135 | |
| Target2 | 6000 | 3000 | 3000 | 200 | 0 | ?135 | |
"
"
| Initial state | x/m | y/m | z/m | v/(m/s) | | | |
| Training episode | UAV1 | [?200, 200] | [?200, 200] | 3000 | 200 | 0 | [20, 60] |
| UAV2 | [2800, 3200] | [?200, 200] | 3200 | 200 | 0 | [20, 60] | |
| Target1 | [2500, 3500] | [2800, 3200] | [2900, 3100] | [180, 220] | 0 | [?155, ?115] | |
| Target2 | [5500, 6500] | [2800, 3200] | [2900, 3100] | [180, 220] | 0 | [?125, ?115] | |
| Evaluation episode | UAV1 | 0 | 0 | 3000 | 200 | 0 | 40 |
| UAV2 | 3000 | 0 | 3200 | 200 | 0 | 40 | |
| Target1 | 3000 | 3000 | 3000 | 200 | 0 | ?135 | |
| Target2 | 6000 | 3000 | 3000 | 200 | 0 | ?135 | |
"
"
| Initial state | x/m | y/m | z/m | v/(m/s) | | | |
| Training episode | UAV1 | [?200, 200] | [?200, 200] | 3000 | 200 | 0 | [20, 60] |
| UAV2 | [2800, 3200] | [?200, 200] | 3200 | 200 | 0 | [20, 60] | |
| Target1 | [2500, 3500] | [2800, 3200] | [2900, 3100] | [180, 220] | 0 | [?155, ?115] | |
| Target2 | [5500, 6500] | [2800, 3200] | [2900, 3100] | [180, 220] | 0 | [?125, ?115] | |
| Evaluation episode | UAV1 | [?100, 100] | [?100, 100] | 3000 | 200 | 0 | [35, 45] |
| UAV2 | [2900, 3100] | [?100, 100] | 3200 | 200 | 0 | [35, 45] | |
| Target1 | [2500, 3500] | [2800, 3200] | [2900, 3100] | [180, 220] | 0 | [?155, ?115] | |
| Target2 | [5500, 6500] | [2800, 3200] | [2900, 3100] | [180, 220] | 0 | [?125, ?115] | |
"
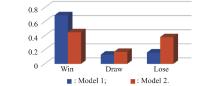
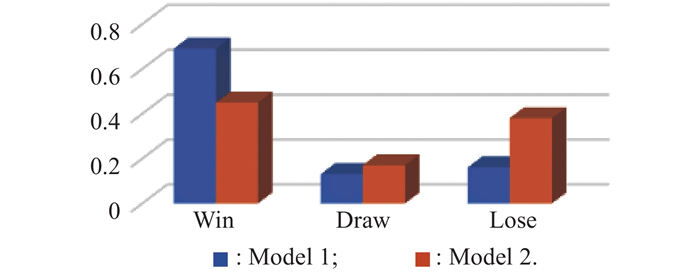
| Result | Condition |
| Win | All targets are shot down |
| Draw | Number of remaining targets and drones are equal |
| Lose | All UAVs are shot down |
"
| 1 |
ZHOU K, WEI R, XU Z, et al An air combat decision learning system based on a brain-like cognitive mechanism. Cognitive Computation, 2020, 12 (1): 128- 139.
doi: 10.1007/s12559-019-09683-7 |
| 2 |
YANG Q M, ZHANG J D, SHI G Q Modeling of UAV path planning based on IMM under POMDP framework. Journal of Systems Engineering and Electronics, 2019, 30 (3): 545- 554.
doi: 10.21629/JSEE.2019.03.12 |
| 3 |
MCGREW J S, HOW J P, WILLIAMS B, et al Air-combat strategy using approximate dynamic programming. Journal of Guidance, Control, and Dynamics, 2010, 33 (5): 1641- 1654.
doi: 10.2514/1.46815 |
| 4 | ZHOU K, WEI R X, XU Z F, et al A brain like air combat learning system inspired by human learning mechanism. Proc. of IEEE/CSAA Guidance, Navigation and Control Conference, 2018, 286- 293. |
| 5 | XU G, WEI S, ZHANG H Application of situation function in air combat differential games. Proc. of the 36th Chinese Control Conference, 2017, 5865- 5870. |
| 6 | PARK H, LEE B Y, TAHK M J, et al Differential game based air combat maneuver generation using scoring function matrix. International Journal of Aeronautical & Space Sciences, 2015, 17 (2): 204- 213. |
| 7 | SMITH R E, DIKE B A, MEHRA R K, et al Classifier systems in combat: two-sided learning of maneuvers for advanced fighter aircraft. Computer Methods in Applied Mechanics & Engineering, 2000, 186 (2): 421- 437. |
| 8 |
HANG C Q, DONG K S, HUANG H Q, et al Autonomous air combat maneuver decision using Bayesian inference and moving horizon optimization. Journal of Systems Engineering and Electronics, 2018, 29 (1): 86- 97.
doi: 10.21629/JSEE.2018.01.09 |
| 9 | GUO H F, HOU M Y, ZHANG Q J, et al UCAV robust maneuver decision based on statistics principle. Acta Armamentarii, 2017, 38 (1): 160- 167. |
| 10 | FU L, XIE H An UAV air-combat decision expert system based on receding horizon control. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41 (11): 1994- 1999. |
| 11 | ROGER W S, ALAN E B. Neural network models of air combat maneuvering. Las Cruces, U.S.: New Mexico State University, 1992. |
| 12 | DING L J, YANG Q M Research on air combat maneuver decision of UAVs based on reinforcement learning. Avionics Technology, 2018, 49 (2): 29- 35. |
| 13 | LIU P, MA Y A deep reinforcement learning based intelligent decision method for UCAV air combat. Proc. of Asian Simulation Conference, 2017, 274- 286. |
| 14 | ZUO J L, YANG R N, ZHANG Y, et al Intelligent decision-making in air combat maneuvering based on heuristic reinforcement learning. Acta Aeronautica et Astronautica Sinica, 2017, 38 (10): 217- 230. |
| 15 |
ZHANG X B, LIU G Q, YANG C J, et al Research on air confrontation maneuver decision-making method based on reinforcement learning. Electronics, 2018, 7 (11): 279.
doi: 10.3390/electronics7110279 |
| 16 | YANG Q M, ZHU Y, ZHANG J D, et al. UAV air combat autonomous maneuver decision based on DDPG algorithm. Proc. of the IEEE 15th International Conference on Control and Automation, 2019: 37−42. |
| 17 |
YANG Q M, ZHANG J D, SHI G Q, et al Maneuver decision of UAV in short-range air combat based on deep reinforcement learning. IEEE Access, 2020, 8, 363- 378.
doi: 10.1109/ACCESS.2019.2961426 |
| 18 |
WAN K F, GAO X G Robust motion control for UAV in dynamic uncertain environments using deep reinforcement learning. Remote Sensing, 2020, 12, 640.
doi: 10.3390/rs12040640 |
| 19 | ROBERT L S. Fighter combat—tactics and maneuvering. Maryland: Naval Institute Press, 1985. |
| 20 | XI Z F, XU A, KOU Y X, et al Decision process of multi-aircraft cooperative air combat maneuver. Systems Engineering and Electronics, 2020, 42 (2): 381- 389. |
| 21 | LI J X, TONG M A, JIN D K Bargaining differential game theory and application to multiple-airplane combat analysis. Systems Engineering-Theory & Practice, 1997, 6 (6): 68- 72. |
| 22 | WANG Y N, JIANG Y X An intelligent differential game on air combat decision. Flight Dynamics, 2003, 21 (1): 66- 70. |
| 23 | ZUO J L, ZHANG Y, YANG R N, et al Reconstruction and evaluation of medium-rang cooperation air combat decision-making process with two phase clustering. Systems Engineering and Electronics, 2020, 42 (1): 108- 117. |
| 24 | XIE R Z, LI J Y, LUO D L Research on maneuvering decisions for multi-UAVs Air combat. Proc. of the 11th IEEE International Conference on Control & Automation, 2014, 767- 772. |
| 25 | LUO D L, SHEN C L, WANG B, et al Air combat decision-making for cooperative multiple target attack using heuristic adaptive genetic algorithm. Proc. of the International Conference on Machine Learning and Cybernetics, 2005, 473- 478. |
| 26 |
SU M C, LAI S C, LIN S C, et al A new approach to multi-aircraft air combat assignments. Swarm and Evolutionary Computation, 2012, 6, 39- 46.
doi: 10.1016/j.swevo.2012.03.003 |
| 27 | WANG Y, ZHANG W, LI Y An efficient clonal selection algorithm to solve dynamic weapon-target assignment game model in UAV cooperative aerial combat. Proc. of the 35th Chinese Control Conference, 2016, 9578- 9581. |
| 28 |
TAL S, STEVE R, DAVE G Assigning micro UAVs to task tours in an urban terrain. IEEE Trans. on Control Systems Technology, 2007, 15 (4): 601- 612.
doi: 10.1109/TCST.2007.899154 |
| 29 | . PENG P, WEN Y, YANG Y, et al. Multiagent bidirectionally-coordinated nets: emergence of human-level coordination in learning to play star craft combat games. arXiv preprint arXiv: 1703.10069v4, 2017. |
| 30 | SILVER D, LEVER G, HEESS N, et al. Deterministic policy gradient algorithms. Proc. of the 31st International Conference on Machine Learning, 2014, 605- 619. |
| 31 | SUTTON R, MCALLESTER D, SINGH S, et al Policy gradient methods for reinforcement learning with function approximation. Proc. of the 13th Annual Neural Information Processing Systems Conference, 1999, 1057- 1063. |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||