Journal of Systems Engineering and Electronics ›› 2026, Vol. 37 ›› Issue (1): 45-63.doi: 10.23919/JSEE.2026.000025
-
收稿日期:2025-12-12出版日期:2026-02-18发布日期:2026-03-09
Hybrid path planning for USVs using improved A* and DWA
Guangwei WANG1,2,3( ), Le YANG4(), Zhikun TAN1,2(), Yichen LI1,2(), Wenbin YU1,2,*()
), Le YANG4(), Zhikun TAN1,2(), Yichen LI1,2(), Wenbin YU1,2,*()
- 1School of Automation and Intelligent Sensing, Shanghai Jiao Tong University, Shanghai 200240, China
2Key Laboratory of System Control and Information Processing, Ministry of Education of China, Shanghai 200240, China
3Tianjin Navigation Instruments Research Institute, Tianjin 300074, China
4Hangzhou Changwangzhichuang Co., Ltd, Hangzhou 310013, China
-
Received:2025-12-12Online:2026-02-18Published:2026-03-09 -
Contact:Wenbin YU E-mail:ray7772008@163.com;anti_i@163.com;zhikuntan@sjtu.edu.cn;liyichensjtu@sjtu.edu.cn;yuwenbin@sjtu.edu.cn -
About author:
WANG Guangwei was born in 1983. He received his B.E. degree in electrical engineering and automation from Northwestern Polytechnical University, Xi’an, China, in 2007, and M.E. degree in motors and electrical appliances from Northwestern Polytechnical University, Xi’an, China, in 2010. He is currently pursuing his Ph.D. degree in electronic information at Shanghai Jiao Tong University, Shanghai, China. His main research interests include underwater navigation and data analysis technologies. E-mail: ray7772008@163.com
YANG Le was born in 1992. He received his B.S. degree in geographic information system from Anhui Normal University, Wuhu, China, in 2015, and M.A. degree in agricultural informatization from Nanjing Agricultural University, Nanjing, China, in 2018. He is currently serving as deputy director of the Large Model Center at Hangzhou Changwang Zhichuang Technology Co., Ltd., Hangzhou, China. His main research interests include algorithm research in individual and swarm intelligence for unmanned equipment, covering target detection, tracking, re-identification, path planning, swarm collaboration, multimodal large models and intelligent agent development in the field of computer vision. E-mail: anti_i@163.com
TAN Zhikun was born in 1999. He received his B.E. degree in marine engineering from Huazhong University of Science and Technology, Wuhan, China, in 2020, and M.E. degree in fluid mechanics from China Ship Science Research Center, Wuxi, China, in 2020. He is currently pursuing his Ph.D. degree in control science and engineering at Shanghai Jiao Tong University, Shanghai, China. His main research interests include cross-domain formation control and target tracking. E-mail: zhikuntan@sjtu.edu.cn
LI Yichen was born in 1993. He received his B.S. degree in detection, guidance and control technology from Northwestern Polytechnical University, Xi’an, China, in 2016, and Ph.D. degree in control science and engineering from Shanghai Jiao Tong University, Shanghai, China, in 2022. He is now a postdoc in control science and engineering with Shanghai Jiao Tong University, Shanghai, China. His main research interests include underwater multi-robot localization and trajectory planning, wireless networks, and information fusion. E-mail: liyichensjtu@sjtu.edu.cn
YU Wenbin was born in 1983. He received his Ph.D. degree in control science and engineering from Shanghai Jiao Tong University, Shanghai, China, in 2016. He is currently an associate professor with the Department of Automation, Shanghai Jiao Tong University. His main research interests include data fusion and control strategy for autonomous underwater vehicle system. E-mail: yuwenbin@sjtu.edu.cn -
Supported by:This work was supported by the National Nature Science Foundation of China (62203299;62373246;62388101), the Research Fund of State Key Laboratory of Deep-Sea Manned Vehicles (2024SKLDMV04), the Oceanic Interdisciplinary Program of Shanghai Jiao Tong University (SL2023MS007), and the Startup Fund for Young Faculty at SJTU (24X010502929).
引用本文
. [J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 45-63.
Guangwei WANG, Le YANG, Zhikun TAN, Yichen LI, Wenbin YU. Hybrid path planning for USVs using improved A* and DWA[J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 45-63.

"

"

"
"

"
"

"
"
"
"

"
"
"
"
"
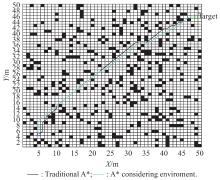
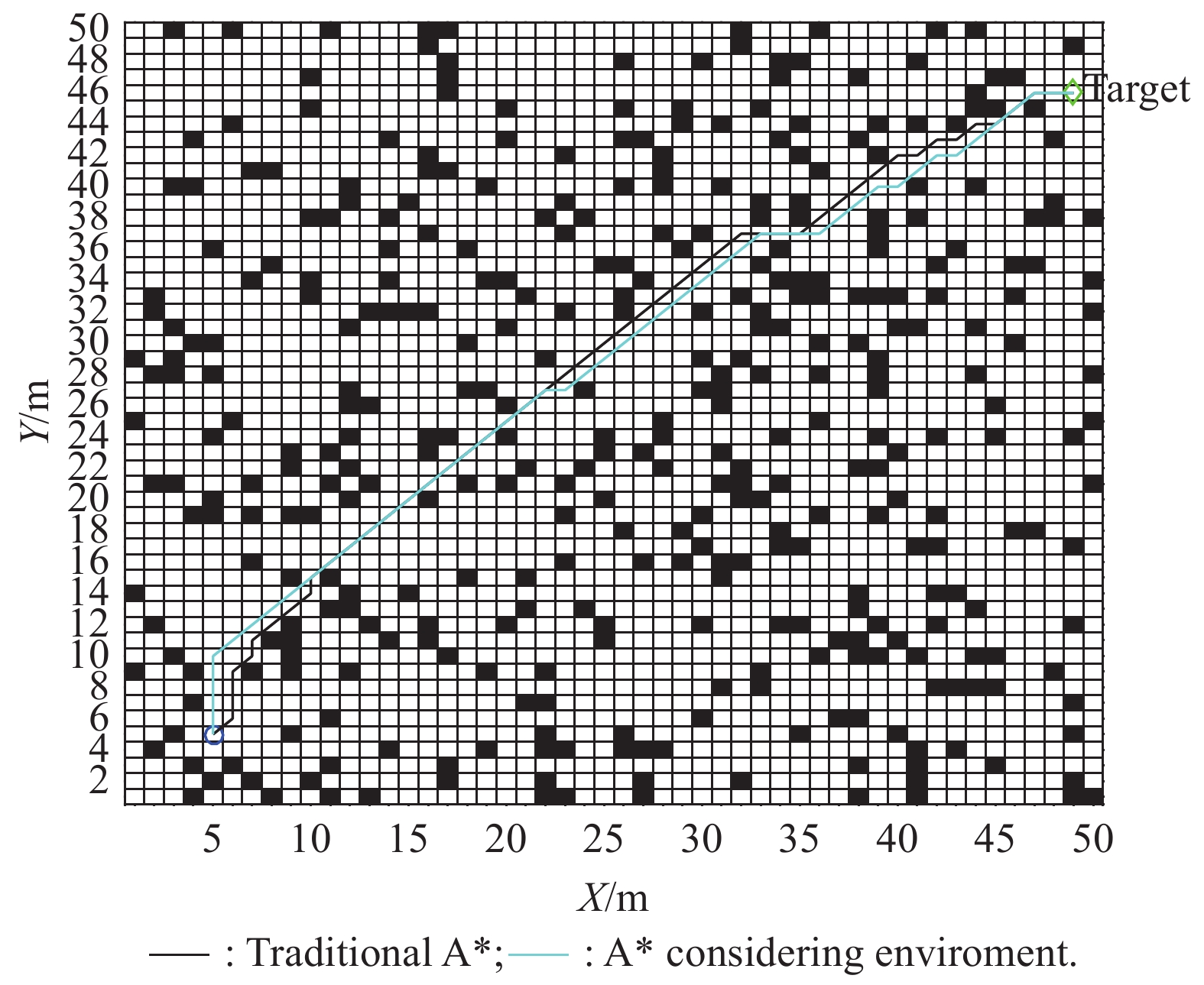
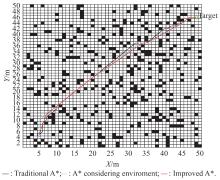
| Parameter | Traditional A* | A* considering obstacles | Optimization algorithm |
| Number of inflection nodes | 15 | 10 | 5 |
| Turning angle/(°) | 675.00 | 450.00 | 164.06 |
| Path length/m | 63.91 | 63.91 | 61.94 |
"
| Parameter | Value |
| 0.2/0.5/0.7 | |
"
"
"
"
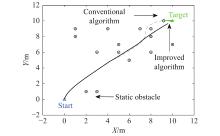
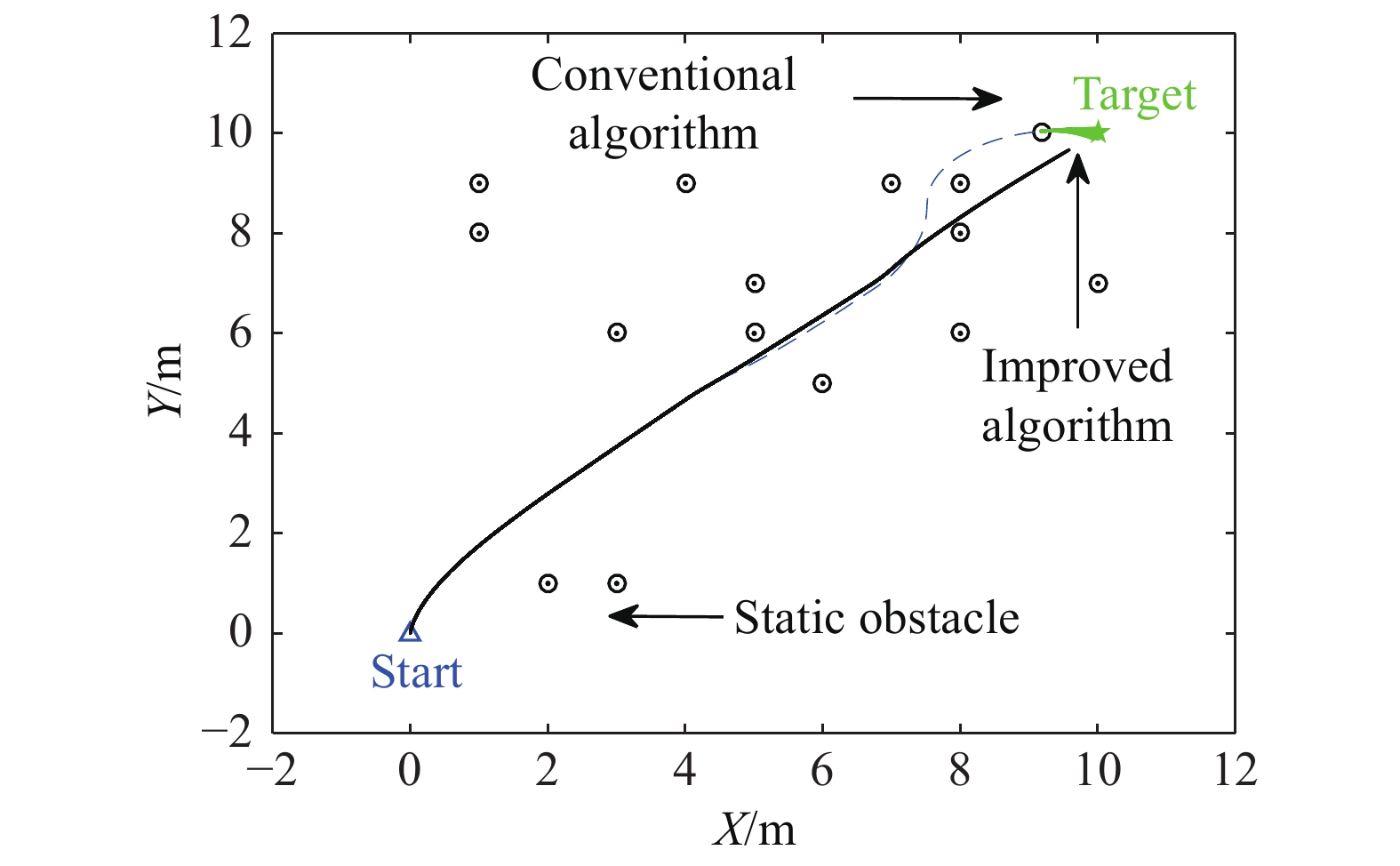
| Radius of obstacle expansion circle/m | Time of navigation/s | Path length/m | Average velocity/(m/s) | ||||||||
| Traditional algorithm | Improved algorithm | Time reduction rate/% | Traditional algorithm | Improved algorithm | Time reduction rate/% | Traditional algorithm | Improved algorithm | Time reduction rate/% | |||
| 0.2 | 48.72 | 22.83 | 53.14 | 14.91 | 14.27 | 4.29 | 0.31 | 0.63 | 103.22 | ||
| 0.5 | 83.85 | 33.27 | 60.32 | 20.32 | 14.71 | 27.61 | 0.24 | 0.44 | 83.33 | ||
| 0.7 | 33.36 | 19.78 | 40.70 | 19.94 | 17.76 | 10.93 | 0.60 | 0.90 | 50.00 | ||

"

"

"

"
"
| Time of navigation/s | Path length/m | Average velocity/(m/s) | |
| 0 | 72.40 | 14.63 | 0.20 |
| 0.05 | 57.34 | 14.32 | 0.25 |
| 0.1 | 56.91 | 14.95 | 0.26 |
| 0.3 | 54.88 | 15.80 | 0.29 |
"
"
"
"
"

"

"
"

"

| 1 |
JIANG X L, XIA G H Dissipative leaderless formation via nonfragile memory sampled-data control for unmanned surface vehicles with switching topologies. IEEE/ASME Trans. on Mechatronics, 2024, 30 (1): 203- 214.
doi: 10.1109/tmech.2024.3391748 |
| 2 |
SHI J, YE M J Distributed optimal formation control for unmanned surface vessels by a regularized game-based approach. IEEE/CAA Journal of Automatica Sinica, 2024, 11 (1): 276- 278.
doi: 10.1109/JAS.2023.123930 |
| 3 |
XIA J W, ZHU X F, ZHONG L, et al LSTM-DPPO based deep reinforcement learning controller for path following optimization of unmanned surface vehicle. Journal of Systems Engineering and Electronics, 2023, 34 (5): 1343- 1358.
doi: 10.23919/JSEE.2023.000113 |
| 4 |
LIU Z X, ZHANG Y M, YU X, et al Unmanned surface vehicles: an overview of developments and challenges. Annual Reviews in Control, 2016, 41, 71- 93.
doi: 10.1016/j.arcontrol.2016.04.018 |
| 5 |
LOU M M, YANG X F, HU J B, et al Design and field test of collision avoidance method with prediction for USVs: a deep deterministic policy gradient approach. IEEE Internet of Things Journal, 2024, 12 (3): 3363- 3372.
doi: 10.1109/jiot.2024.3479322 |
| 6 | PATIL G, KASHID S, RANE A, et al. Analyzing and implementing pathfinding algorithms for flight route planning in Java. Proc. of the IEEE International Conference on Inventive Computation Technologies, 2025: 28−33. |
| 7 | BABU T, NAYAK D, MISHRA S. Enhancing greedy best-first search with dynamic heuristic for puzzle solving. Proc. of the IEEE International Conference on Emerging Technologies in Computing and Communication, 2025. DOI: 10.1109/ETCC65847.2025.11108541. |
| 8 |
LIN Z, WU K, SHEN R L, et al An efficient and accurate A-star algorithm for autonomous vehicle path planning. IEEE Trans. on Vehicular Technology, 2023, 73 (6): 9003- 9008.
doi: 10.1109/tvt.2023.3348140 |
| 9 |
ZHENG D L, RIDDERHOF J, ZHANG Z Y, et al CS-BRM: a probabilistic roadmap for consistent belief space planning with reachability guarantees. IEEE Trans. on Robotics, 2024, 40, 1630- 1649.
doi: 10.1109/TRO.2024.3355375 |
| 10 |
KHUAT T H, BUI D N, NGUYEN H T, et al Multi-goal rapidly exploring random tree with safety and dynamic constraints for UAV cooperative path planning. IEEE Trans. on Vehicular Technology, 2025, 74 (9): 13446- 13457.
doi: 10.1109/TVT.2025.3560658 |
| 11 |
HOU Y, QIN X M, HAN H G, et al Multiobjective ant colony optimization algorithm based on dynamic constraint evaluation strategy for highly constrained optimization. IEEE Trans. on Cybernetics, 2025, 55 (10): 4570- 4582.
doi: 10.1109/TCYB.2025.3591275 |
| 12 |
FENG T P, LI J M, JIANG H, et al The optimal global path planning of mobile robot based on improved hybrid adaptive genetic algorithm in different tasks and complex road environments. IEEE Access, 2024, 12, 18400- 18415.
doi: 10.1109/ACCESS.2024.3357990 |
| 13 |
GAN X L, HUO Z H, LI W DP-A*: for path planning of UGV and contactless delivery. IEEE Trans. on Intelligent Transportation Systems, 2023, 25 (1): 907- 919.
doi: 10.1109/tits.2023.3258186 |
| 14 |
JONNALAGADDA A, SAI Y, BHARAT M V, et al Efficient path planning in multi-agent environment of AAVS with payloads. IEEE Access, 2025, 13, 57932- 57942.
doi: 10.1109/ACCESS.2025.3554546 |
| 15 |
DANIEL K, NASH A, KOENIG S, et al Theta*: any-angle path planning on grids. Journal of Artificial Intelligence Research, 2010, 39, 533- 579.
doi: 10.1613/jair.2994 |
| 16 |
MANYAM S G, CASBEER D W, TAYLOR C Hybrid Theta*: motion planning for dubins vehicles with integral constraints. IEEE Robotics and Automation Letters, 2024, 10 (2): 1497- 1504.
doi: 10.1109/lra.2024.3522786 |
| 17 |
LIU H X, ZHANG Y H ASL-DWA: an improved A-star algorithm for indoor cleaning robots. IEEE Access, 2022, 10, 99498- 99515.
doi: 10.1109/ACCESS.2022.3206356 |
| 18 |
WANG M H, XU J, ZHANG J, et al An autonomous navigation method for orchard rows based on a combination of an improved A-star algorithm and SVR. Precision Agriculture, 2024, 25 (3): 1429- 1453.
doi: 10.1007/s11119-024-10118-z |
| 19 |
SANG H Q, YOU Y S, SUN X J, et al The hybrid path planning algorithm based on improved A* and artificial potential field for unmanned surface vehicle formations. Ocean Engineering, 2021, 223, 108709.
doi: 10.1016/j.oceaneng.2021.108709 |
| 20 |
ZHANG H X, TAO Y D, ZHU W L Global path planning of unmanned surface vehicle based on improved A-star algorithm. Sensors, 2023, 23 (14): 6647.
doi: 10.3390/s23146647 |
| 21 |
WANG Y L, YU X M, LIANG X, et al A COLREGs-based obstacle avoidance approach for unmanned surface vehicles. Ocean Engineering, 2018, 169 (1): 110- 124.
doi: 10.1016/j.oceaneng.2018.09.012 |
| 22 |
GIBSON J, SCHULER T, MCGUIRE L, et al Swarm and multi-agent time-based A* path planning for lighter-than-air systems. Unmanned Systems, 2020, 8 (3): 253- 260.
doi: 10.1142/S2301385020500181 |
| 23 |
HE Z B, LIU C G, CHU X M, et al Dynamic anti-collision A-star algorithm for multi-ship encounter situations. Applied Ocean Research, 2022, 118, 102995.
doi: 10.1016/j.apor.2021.102995 |
| 24 |
SHAN S F, SHAO J J, ZHANG H J, et al Research and validation of self-driving path planning algorithm based on optimized A*-artificial potential field method. IEEE Sensors Journal, 2024, 24 (15): 24708- 24722.
doi: 10.1109/JSEN.2024.3410271 |
| 25 |
SONG Y C, WANG R H, BI Q C, et al STVO: spatial-temporal constrained velocity obstacle for safe navigation among pedestrians. IEEE Trans. on Vehicular Technology, 2025, 74 (9): 13580- 13591.
doi: 10.1109/TVT.2025.3565734 |
| 26 |
CHEN Z, ZHANG Y M, ZHANG Y G, et al A hybrid path planning algorithm for unmanned surface vehicles in complex environment with dynamic obstacles. IEEE Access, 2019, 7, 126439- 126449.
doi: 10.1109/ACCESS.2019.2936689 |
| 27 |
ZHANG J, CUI Y N, LI G F, et al Dynamic path planning algorithm for unmanned surface vehicle under island-reef environment. IEEE Trans. on Aerospace and Electronic Systems, 2023, 59 (5): 7252- 7268.
doi: 10.1109/taes.2023.3286823 |
| 28 |
CHEN H, LIN Z L, CHEN Z M, et al Adaptive DWA algorithm with decision tree classifier for dynamic planning in USV navigation. Ocean Engineering, 2025, 321, 120328.
doi: 10.1016/j.oceaneng.2025.120328 |
| 29 |
ZHU W L, CHEN Z F Research on path planning for mobile charging robots based on improved A* and DWA algorithms. Electronics, 2025, 14 (12): 2318.
doi: 10.3390/electronics14122318 |
| 30 |
GUAN W, WANG K Autonomous collision avoidance of unmanned surface vehicles based on improved A-star and dynamic window approach algorithms. IEEE Intelligent Transportation Systems Magazine, 2023, 15 (3): 36- 50.
doi: 10.1109/MITS.2022.3229109 |
| 31 |
SONG R, LIU Y C, BUCKNALL R Smoothed A* algorithm for practical unmanned surface vehicle path planning. Applied Ocean Research, 2019, 83, 9- 20.
doi: 10.1016/j.apor.2018.12.001 |
| 32 |
DU Z, WEN Y Q, XIAO C S, et al Trajectory-cell based method for the unmanned surface vehicle motion planning. Applied Ocean Research, 2019, 86, 207- 221.
doi: 10.1016/j.apor.2019.02.005 |
| 33 |
BITAR G, MARTINSEN A B, LEKKAS A M, et al Two-stage optimized trajectory planning for ASVs under polygonal obstacle constraints: theory and experiments. IEEE Access, 2020, 8, 199953- 199969.
doi: 10.1109/ACCESS.2020.3035256 |
| 34 |
WANG Y L, YU X M, LIANG X Design and implementation of global path planning system for unmanned surface vehicle among multiple task points. International Journal of Vehicle Autonomous Systems, 2018, 14 (1): 82- 105.
doi: 10.1504/ijvas.2018.10014293 |
| 35 |
SU Y X, XIN J Y, SUN C Y Dynamic path planning for mobile robots based on improved RRT* and DWA algorithms. IEEE Trans. on Industrial Electronics, 2025, 72 (10): 10595- 10604.
doi: 10.1109/TIE.2025.3546349 |
| 36 |
JIAN Z Q, ZHANG S Y, SUN L F, et al Long-term dynamic window approach for kinodynamic local planning in static and crowd environments. IEEE Robotics and Automation Letters, 2023, 8 (6): 3294- 3301.
doi: 10.1109/LRA.2023.3266664 |
| 37 |
YASUDA S, KUMAGAI T, YOSHIDA H Safe and efficient dynamic window approach for differential mobile robots with stochastic dynamics using deterministic sampling. IEEE Robotics and Automation Letters, 2023, 8 (5): 2614- 2621.
doi: 10.1109/LRA.2023.3257681 |
| 38 |
HU Y W, CHEN X F, TANG P P, et al A path planning framework for robots based on improved parallel sampling RRT and offset guidance DWA. IEEE Sensors Journal, 2025, 25 (18): 35597- 35608.
doi: 10.1109/JSEN.2025.3596346 |
| 39 |
HUANG J H, ZENG J, CHI X M, et al Dynamic collision avoidance using velocity obstacle-based control barrier functions. IEEE Trans. on Control Systems Technology, 2025, 33 (5): 1601- 1615.
doi: 10.1109/TCST.2025.3546076 |
| 40 | DE BOOIJ A, THEUNISSEN E. Analyzing the impact of sensor noise in the TCPA-DCPA domain. Proc. of the AIAA DATC/IEEE 43rd Digital Avionics Systems Conference, 2024. DOI: 10.1109/DASC62030.2024.10749449. |
| No related articles found! |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||