
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (1): 269-279.doi: 10.23919/JSEE.2024.000130
• CONTROL THEORY AND APPLICATION • Previous Articles
Yuxuan DENG( ), Qingling WANG()
), Qingling WANG()
Received:2023-11-07
Accepted:2024-07-28
Online:2025-02-18
Published:2025-03-18
Contact:
Qingling WANG
E-mail:yuxuandeng@seu.edu.cn;csuwql@gmail.com
About author:Supported by:Yuxuan DENG, Qingling WANG. Observed-based adaptive neural tracking control for nonlinear systems with unknown control directions and input delay[J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 269-279.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
System output y and the desired trajectory yd of Example 1"
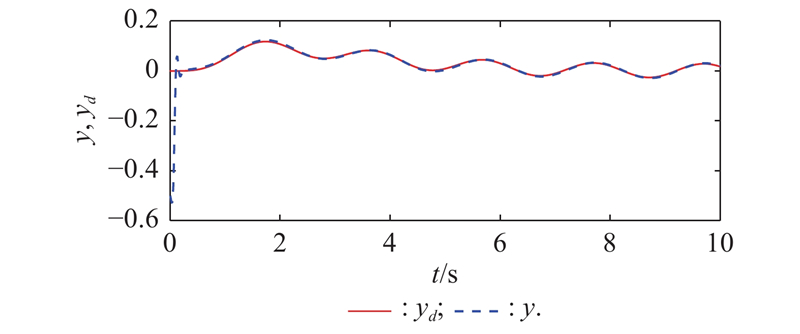
Fig 2
Trajectories (0?1 s) of system states and new states estimation"
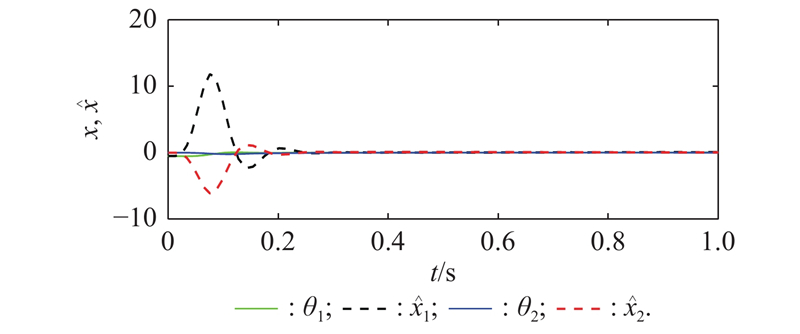
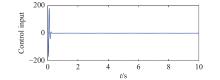
Fig 3
Control input u(t) of Example 1"
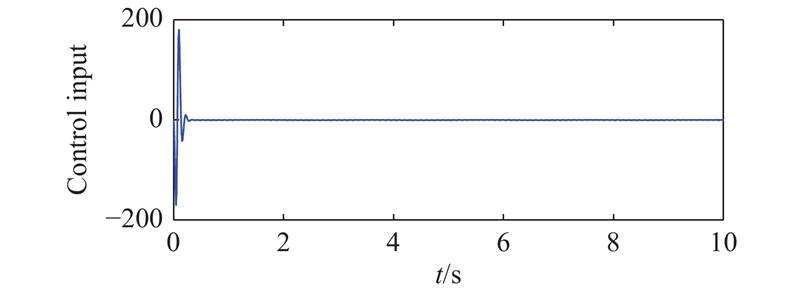
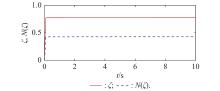
Fig 4
Nussbaum function N(ζ) and its argument ζ"
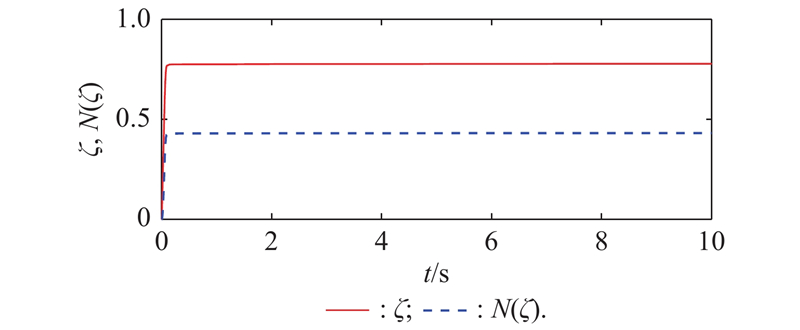
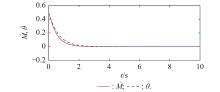
Fig 5
Adaptive parameters $\hat {\boldsymbol{M}}$, $\hat {\boldsymbol{\theta}} $"
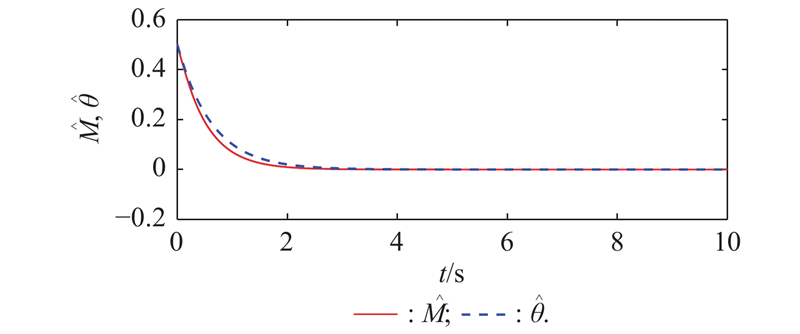
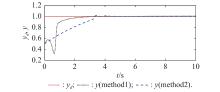
Fig 6
System output tracking y and its reference yd of Example 2"
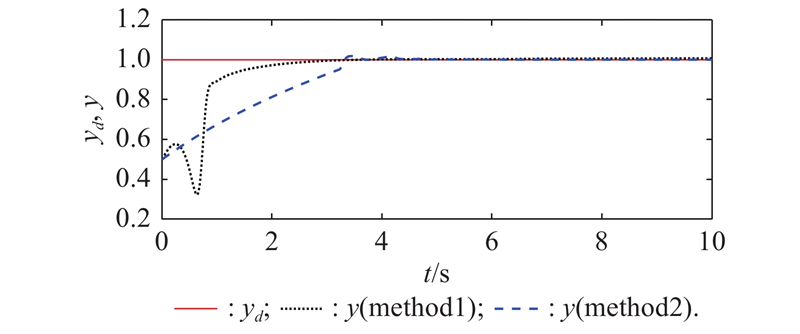
Fig 7
Control input u(t) of Example 3"
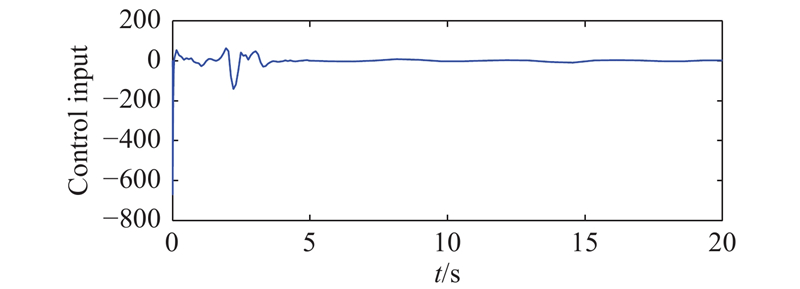
Fig 8
System output tracking y and its reference yd of Example 3"
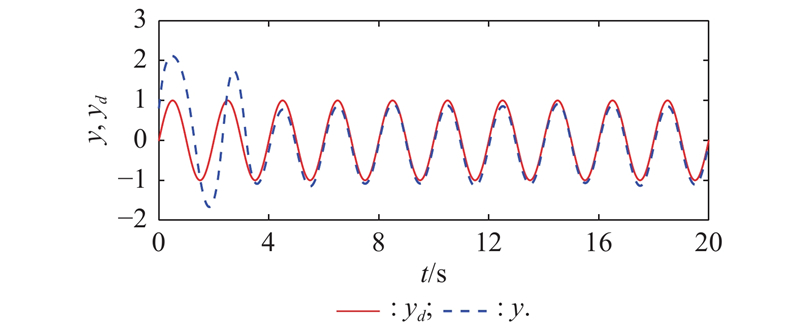
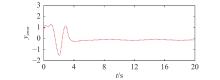
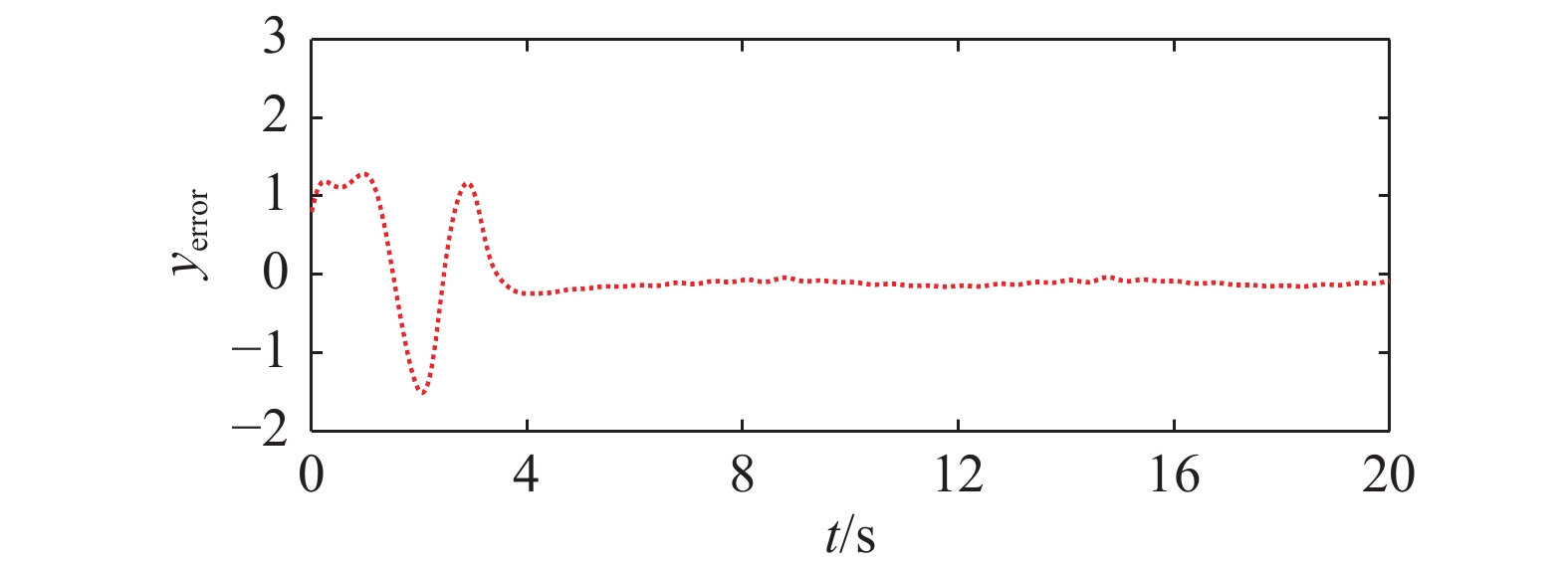
Fig 9
System output tracking error yerror of Example 3"
| 1 |
MAHGOUB Y, EL-BADAWY A Nonlinear disturbance observer-based control of a structural dynamic model of a twin-tailed fighter aircraft. Nonlinear Dynamics, 2022, 108 (1): 315- 328.
doi: 10.1007/s11071-022-07213-z |
| 2 |
MA J L, ZHUANG G M, CUI G Z, et al Observer-based adaptive control for nonlinear input-delay systems with unknown control directions. International Journal of Systems Science, 2019, 50 (8): 1543- 1555.
doi: 10.1080/00207721.2019.1616848 |
| 3 |
JASIM O A, VERES S M A robust controller for multi rotor UAVS. Aerospace Science and Technology, 2020, 105, 106010.
doi: 10.1016/j.ast.2020.106010 |
| 4 |
KOSUT R, FRIEDLANDER B Robust adaptive control: conditions for global stability. IEEE Trans. on Automatic Control, 1985, 30 (7): 610- 624.
doi: 10.1109/TAC.1985.1104020 |
| 5 | SHU Y J BLF-based neural dynamic surface control for stochastic nonlinear systems with time delays and full-state constraints. International Journal of Control, 2023, 97 (5): 982- 998. |
| 6 | SHU Y J Neural dynamic surface control for stochastic nonlinear systems with unknown control directions and unmodelled dynamics. IET Control Theory & Applications, 2023, 17 (6): 649- 661. |
| 7 | CUI D, XIANG Z R Nonsingular fixed-time fault-tolerant fuzzy control for switched uncertain nonlinear systems. IEEE Trans. on Fuzzy Systems, 2022, 31 (1): 174- 183. |
| 8 |
CHEN Z Y, NIU B, ZHANG L, et al Command filtering-based adaptive neural network control for uncertain switched nonlinear systems using event-triggered communication. International Journal of Robust and Nonlinear Control, 2022, 32 (11): 6507- 6522.
doi: 10.1002/rnc.6154 |
| 9 |
SONG J C, YAN M D, YANG P P Neural adaptive dynamic surface asymptotic tracking control for a class of uncertain nonlinear system. Circuits, Systems, and Signal Processing, 2021, 40, 1673- 1698.
doi: 10.1007/s00034-020-01558-9 |
| 10 |
CHEN S Y, WANG Y C, SHI W R, et al Adaptive robust dynamic surface control for uncertain strict-feedback nonlinear systems using fuzzy logic systems. Asian Journal of Control, 2021, 23 (2): 761- 773.
doi: 10.1002/asjc.2253 |
| 11 |
YANG Y K, NIU Y G Event-triggered adaptive neural back-stepping control for nonstrict-feedback nonlinear time-delay systems. Journal of the Franklin Institute, 2020, 357 (8): 4624- 4644.
doi: 10.1016/j.jfranklin.2020.02.003 |
| 12 |
WANG C W, JI X H, ZHANG Z Y, et al Tracking differentiator based back-stepping control for valve-controlled hydraulic actuator system. ISA Transactions, 2022, 119, 208- 220.
doi: 10.1016/j.isatra.2021.02.028 |
| 13 |
MIN X, BALDI S, YU W W, et al Low-complexity control with funnel performance for uncertain nonlinear multi-agent systems. IEEE Trans. on Automatic Control, 2024, 69 (3): 1975- 1982.
doi: 10.1109/TAC.2023.3302855 |
| 14 | SWAROOP D, GERDES J C, YIP P P, et al. Dynamic surface control of nonlinear systems. Proc. of the American Control Conference, 1997: 3028−3034. |
| 15 |
GAO S G, DONG H R, NING B Neural adaptive dynamic surface control for uncertain strict-feedback nonlinear systems with nonlinear output and virtual feedback errors. Nonlinear Dynamics, 2017, 90, 2851- 2867.
doi: 10.1007/s11071-017-3847-9 |
| 16 |
JU P L, JU Y F, SONG J C Fuzzy adaptive asymptotic control for a class of large-scale high-order unknown nonlinear systems. Applied Sciences, 2023, 13 (15): 8968.
doi: 10.3390/app13158968 |
| 17 | PARK J H, LEE T H, LIU Y, et al. Dynamic systems with time delays: stability and control: volume 4. Singapore: Springer, 2019. |
| 18 | LU J, JIANG B, ZHENG W X Potential impacts of delay on stability of impulsive control systems. IEEE Trans. on Automatic Control, 2021, 67 (10): 5179- 5190. |
| 19 |
CHEN X Y, LIU Y, RUAN Q H, et al Stabilization of nonlinear time-delay systems: flexible delayed impulsive control. Applied Mathematical Modelling, 2023, 114, 488- 501.
doi: 10.1016/j.apm.2022.10.013 |
| 20 |
LIU Y, XU J Y, LU J Q, et al Stability of stochastic time-delay systems involving delayed impulses. Automatica, 2023, 152, 110955.
doi: 10.1016/j.automatica.2023.110955 |
| 21 |
FANG F, DING H T, LIU Y T, et al Fault tolerant sampled-data H control for networked control systems with probabilistic time-varying delay. Information Sciences, 2021, 544, 395- 414.
doi: 10.1016/j.ins.2020.08.063 |
| 22 | ZHANG D W, LIU G P, CAO L Proportional integral predictive control of high-order fully actuated networked multiagent systems with communication delays. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2022, 53 (2): 801- 812. |
| 23 |
ZHANG X M, HAN Q L, GE X A novel approach to H performance analysis of discrete-time networked systems subject to network-induced delays and malicious packet dropouts. Automatica, 2022, 136, 110010.
doi: 10.1016/j.automatica.2021.110010 |
| 24 |
TIAN Z D, WANG Y H Predictive control compensation for networked control system with time-delay. Journal of Systems and Control Engineering, 2022, 236 (1): 107- 124.
doi: 10.1177/09596518211018298 |
| 25 |
SONG G F, ZHANG Z M, ZHU Y N, et al Discrete-time control for highly nonlinear neutral stochastic delay systems. Applied Mathematics and Computation, 2022, 430, 127313.
doi: 10.1016/j.amc.2022.127313 |
| 26 |
DU Y, YANG Q S, ZHAN X S, et al Optimal tracking performance of network time-delay systems with multiple constraints. Asian Journal of Control, 2024, 26 (1): 393- 402.
doi: 10.1002/asjc.3211 |
| 27 |
WANG Z C, SUN J, CHEN J, et al Finite-time stability of switched nonlinear time-delay systems. International Journal of Robust and Nonlinear Control, 2020, 30 (7): 2906- 2919.
doi: 10.1002/rnc.4928 |
| 28 | PARK J H. Recent advances in control problems of dynamical systems and networks. Berlin: Springer International Publishing, 2021. |
| 29 | DEEPAK V D, ARUN N, SHIHABUDHEEN K Time-delay systems: recent trends and advancements. IFAC Papersonline, 2022, 55 (1): 290- 297. |
| 30 |
LIU Y C, ZHU Q D, WANG L P Event-based adaptive fuzzy control design for nonstrict-feedback nonlinear time-delay systems with state constraints. ISA Transactions, 2022, 125, 134- 145.
doi: 10.1016/j.isatra.2021.07.001 |
| 31 |
ZHANG X M, HAN Q L, GE X The construction of augmented Lyapunov-Krasovskii functionals and the estimation of their derivatives in stability analysis of time-delay systems: a survey. International Journal of Systems Science, 2022, 53 (12): 2480- 2495.
doi: 10.1080/00207721.2021.2006356 |
| 32 |
XU K, WANG H, LIU P X Adaptive fixed-time control for high-order stochastic nonlinear time-delay systems: an improved Lyapunov-Krasovskii function. IEEE Trans. on Cybernetics, 2024, 54 (2): 776- 786.
doi: 10.1109/TCYB.2023.3337792 |
| 33 | ZHANG X, LIN W, LIN Y Nonsmooth feedback control of time-delay nonlinear systems: a dynamic gain based approach. IEEE Trans. on Automatic Control, 2016, 62 (1): 438- 444. |
| 34 | WANG H Q, LIU X P, LIU K F, et al Approximation-based adaptive fuzzy tracking control for a class of nonstrict-feedback stochastic nonlinear time-delay systems. IEEE Trans. on Fuzzy Systems, 2014, 23 (5): 1746- 1760. |
| 35 | LI D P, LIU Y J, TONG S, et al Neural networks-based adaptive control for nonlinear state constrained systems with input delay. IEEE Trans. on Cybernetics, 2018, 49 (4): 1249- 1258. |
| 36 |
YOU F Q, CHEN N, ZHU Z, et al Adaptive fuzzy control for nonlinear state constrained systems with input delay and unknown control coefficients. IEEE Access, 2019, 7, 53718- 53730.
doi: 10.1109/ACCESS.2019.2912630 |
| 37 |
MA J L, XU S Y, ZHUANG G M, et al Adaptive neural network tracking control for uncertain nonlinear systems with input delay and saturation. International Journal of Robust and Nonlinear Control, 2020, 30 (7): 2593- 2610.
doi: 10.1002/rnc.4887 |
| 38 |
WANG H Q, LIU S W, YANG X B Adaptive neural control for non-strict-feedback nonlinear systems with input delay. Information Sciences, 2020, 514, 605- 616.
doi: 10.1016/j.ins.2019.09.043 |
| 39 | WANG T, WU J, WANG Y J, et al Adaptive fuzzy tracking control for a class of strict-feedback nonlinear systems with time-varying input delay and full state constraints. IEEE Trans. on Fuzzy Systems, 2019, 28 (12): 3432- 3441. |
| 40 |
FISCHER N, DANI A, SHARMA N, et al Saturated control of an uncertain nonlinear system with input delay. Automatica, 2013, 49 (6): 1741- 1747.
doi: 10.1016/j.automatica.2013.02.013 |
| 41 |
LIU Z Q Adaptive extended state observer based heading control for surface ships associated with sideslip compensation. Applied Ocean Research, 2021, 110, 102605.
doi: 10.1016/j.apor.2021.102605 |
| 42 | CHANG J, DE BREUKER R, WANG X R Adaptive nonlinear incremental flight control for systems with unknown control effectiveness. IEEE Trans. on Aerospace and Electronic Systems, 2022, 59 (1): 228- 240. |
| 43 | NUSSBAUM R D Some wangs on a conjecture in parameter adaptive control. Systems & Control Letters, 1983, 3 (5): 243- 246. |
| 44 |
ZHAO N N, OUYANG X Y, WU L B, et al Event-triggered adaptive prescribed performance control of uncertain nonlinear systems with unknown control directions. ISA Transactions, 2021, 108, 121- 130.
doi: 10.1016/j.isatra.2020.08.027 |
| 45 | HUANG L T, LI Y M, TONG S C Fuzzy adaptive output feedback control for mimo switched nontriangular structure nonlinear systems with unknown control directions. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2017, 50 (2): 550- 564. |
| 46 |
DU P H, PAN Y N, CHADLI M, et al Asymptotic tracking control for constrained nonstrict-feedback mimo nonlinear systems via parameter compensations. International Journal of Robust and Nonlinear Control, 2020, 30 (8): 3365- 3381.
doi: 10.1002/rnc.4938 |
| 47 |
ZHANG W F, YUE H Y, CHEN Q J, et al Fraction dynamic-surface-based adaptive neural finite-time control for stochastic nonlinear systems subject to unknown control directions, time-varying input delay and state delay. Journal of the Franklin Institute, 2022, 359 (18): 10355- 10391.
doi: 10.1016/j.jfranklin.2022.10.029 |
| 48 |
DENG X F, ZHANG C, GE Y Adaptive neural network dynamic surface control of uncertain strict-feedback nonlinear systems with unknown control direction and unknown actuator fault. Journal of the Franklin Institute, 2022, 359 (9): 4054- 4073.
doi: 10.1016/j.jfranklin.2022.04.010 |
| 49 |
SHOU Y X, XU B, PU H Y, et al Composite learning control of strict-feedback nonlinear system with unknown control gain function. International Journal of Robust and Nonlinear Control, 2023, 33 (13): 7793- 7810.
doi: 10.1002/rnc.6797 |
| 50 |
SHI W R, HOU M Z, HAO M R Adaptive robust dynamic surface asymptotic tracking for uncertain strict-feedback nonlinear systems with unknown control direction. ISA Transactions, 2022, 121, 95- 104.
doi: 10.1016/j.isatra.2021.04.009 |
| 51 | CHENG H, HUANG X C, CAO H W Asymptotic tracking control for uncertain nonlinear strict-feedback systems with unknown time-varying delays. IEEE Trans. on Neural Networks and Learning Systems, 2022, 34 (12): 9821- 9831. |
| 52 |
LIU X, TONG D B, CHEN Q Y, et al Observer-based adaptive funnel dynamic surface control for nonlinear systems with unknown control coefficients and hysteresis input. Neural Processing Letters, 2022, 54 (6): 4681- 4710.
doi: 10.1007/s11063-022-10827-4 |
| 53 |
SHU Y J, TONG Y H, YU C G Robust neural tracking control for switched nonaffine stochastic nonlinear systems with unknown control directions and backlash-like hysteresis. Journal of the Franklin Institute, 2020, 357 (5): 2791- 2812.
doi: 10.1016/j.jfranklin.2019.12.011 |
| [1] | Jianping ZHOU, Wei LI, Qunli XIA, Huan JIANG. Robust missile autopilot design based on dynamic surface control [J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 160-171. |
| [2] | Xianting Bi and Xiaoping Shi. Attitude stabilization of rigid spacecraft implemented in backstepping control with input delay [J]. Systems Engineering and Electronics, 2017, 28(5): 955-962. |
| [3] | Yueyue Ma, Jie Guo, and Shengjing Tang. BTT autopilot design for agile missiles with aerodynamic uncertainty [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 802-. |
| [4] | Li Zhou and Shumin Fei. Adaptive dynamic surface control for air-breathing hypersonic vehicle [J]. Journal of Systems Engineering and Electronics, 2013, 24(3): 463-. |
| [5] | Jing Li, Junmin Li, and Yuli Xiao. Adaptive NN stabilization for stochastic systems with discrete and distributed time-varying delays [J]. Journal of Systems Engineering and Electronics, 2011, 22(6): 954-966. |
| [6] | Li Zhou, Shumin Fei, and Changsheng Jiang. Adaptive integral dynamic surface control based on fully tuned radial basis function neural network [J]. Journal of Systems Engineering and Electronics, 2010, 21(6): 1072-1078. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||