
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (2): 380-396.doi: 10.23919/JSEE.2024.000122
• DEFENCE ELECTRONICS TECHNOLOGY • Previous Articles
Zhan CHEN( ), Yangwang FANG(), Ruitao ZHANG(), Wenxing FU()
), Yangwang FANG(), Ruitao ZHANG(), Wenxing FU()
Received:2024-05-10
Online:2025-04-18
Published:2025-05-20
Contact:
Yangwang FANG
E-mail:chenzhan@mail.nwpu.edu.cn;ywfang@nwpu.edu.cn;ruitaozhang@mail.nwpu.edu.cn;wenxingfu@nwpu.edu.cn
About author:Supported by:Zhan CHEN, Yangwang FANG, Ruitao ZHANG, Wenxing FU. Factor graph method for target state estimation in bearing-only sensor network[J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 380-396.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
System model for cooperative state estimation"
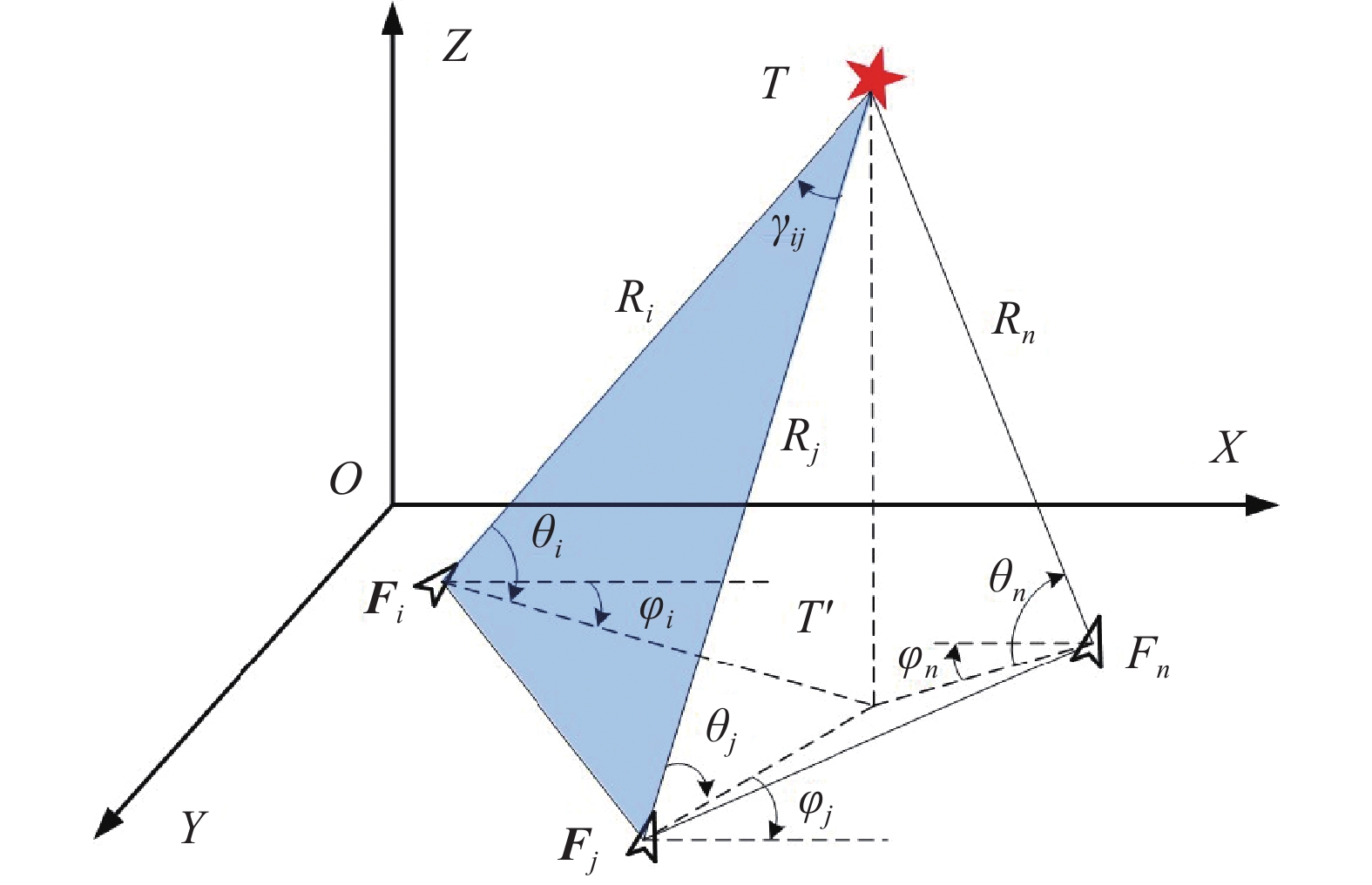
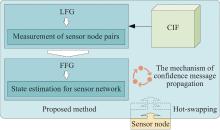
Fig 2
Structure of the proposed method"
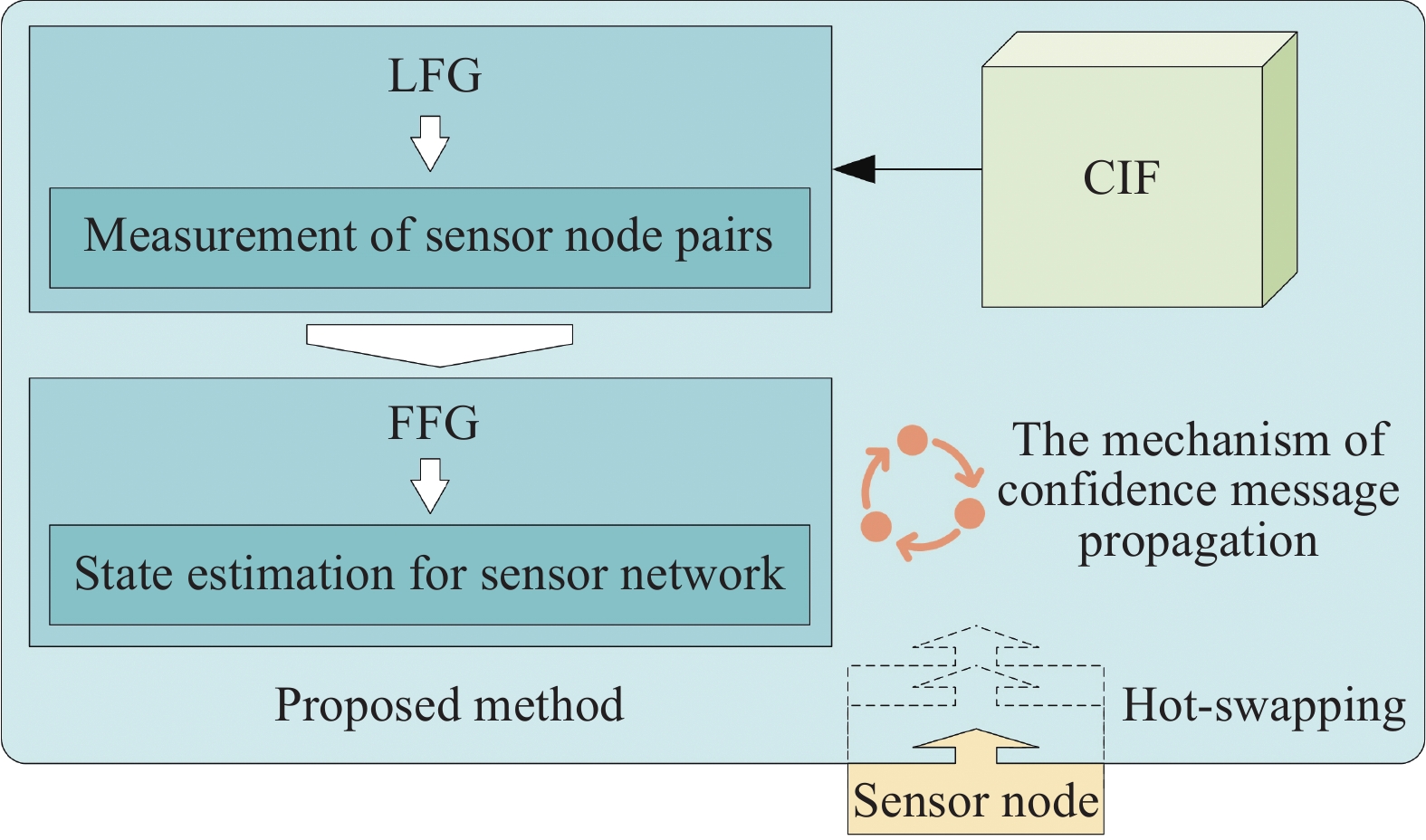

Fig 3
LFG structure of sensor node pairs"
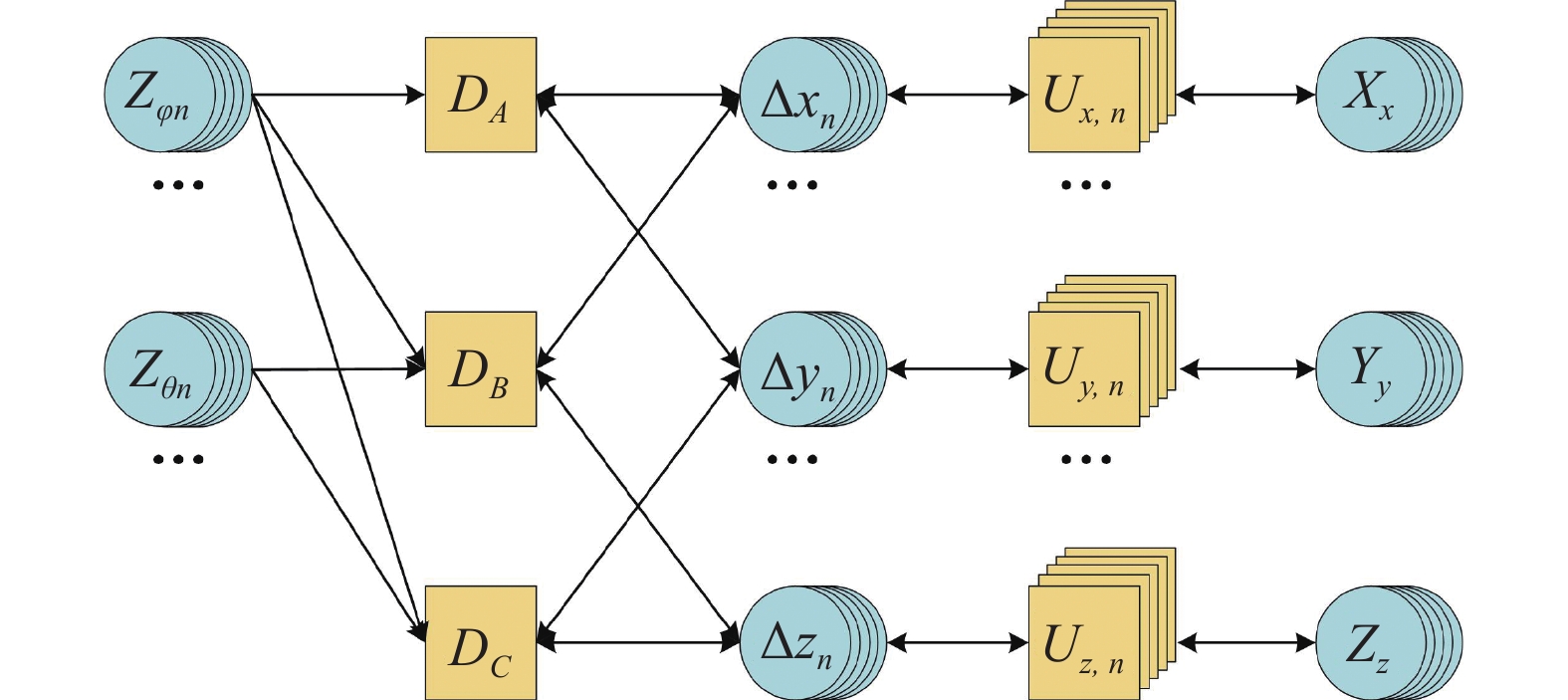

Fig 4
FFG structure of sensor node network"
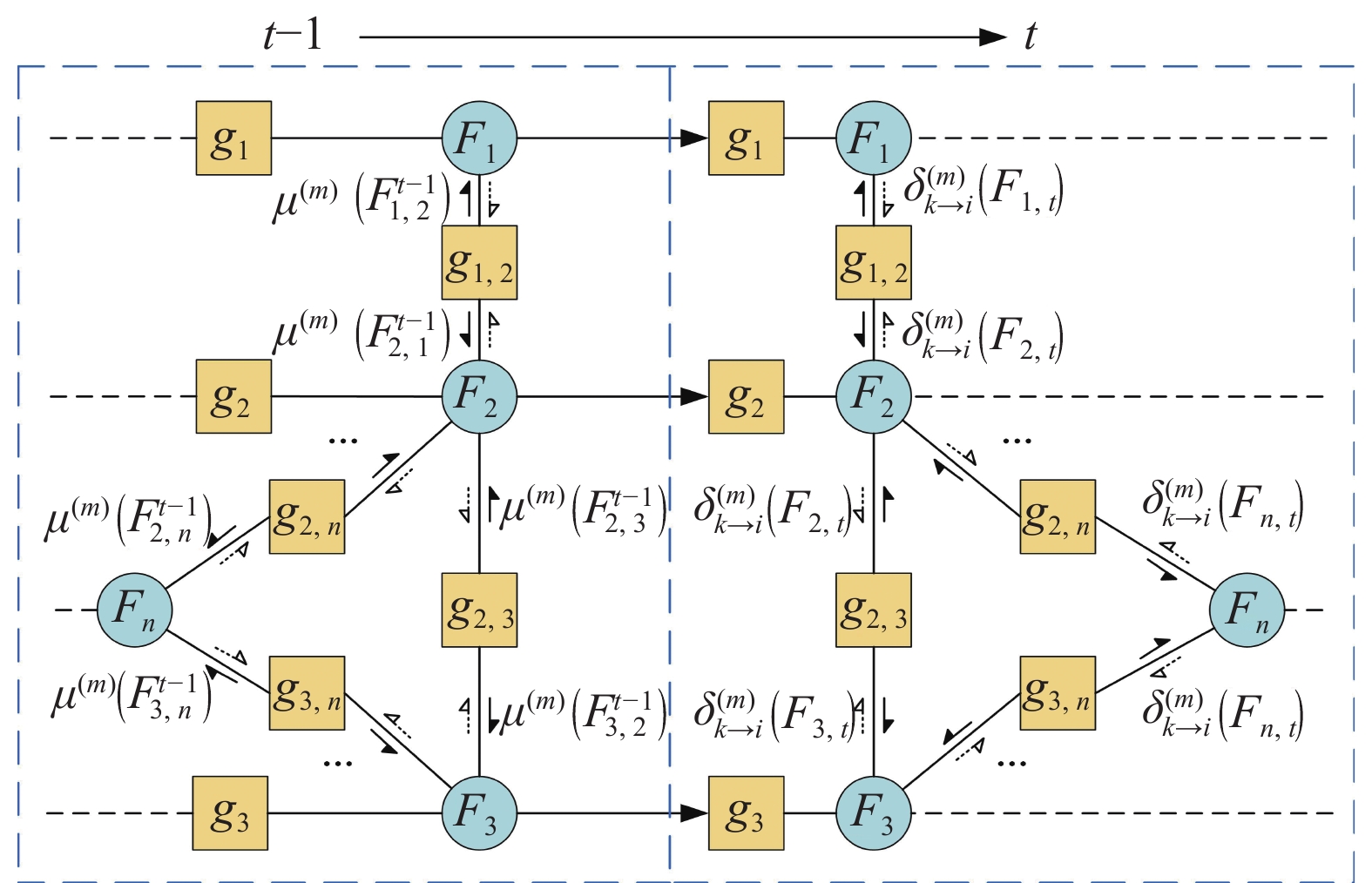

Fig 5
Process and status of FG-DCIF"
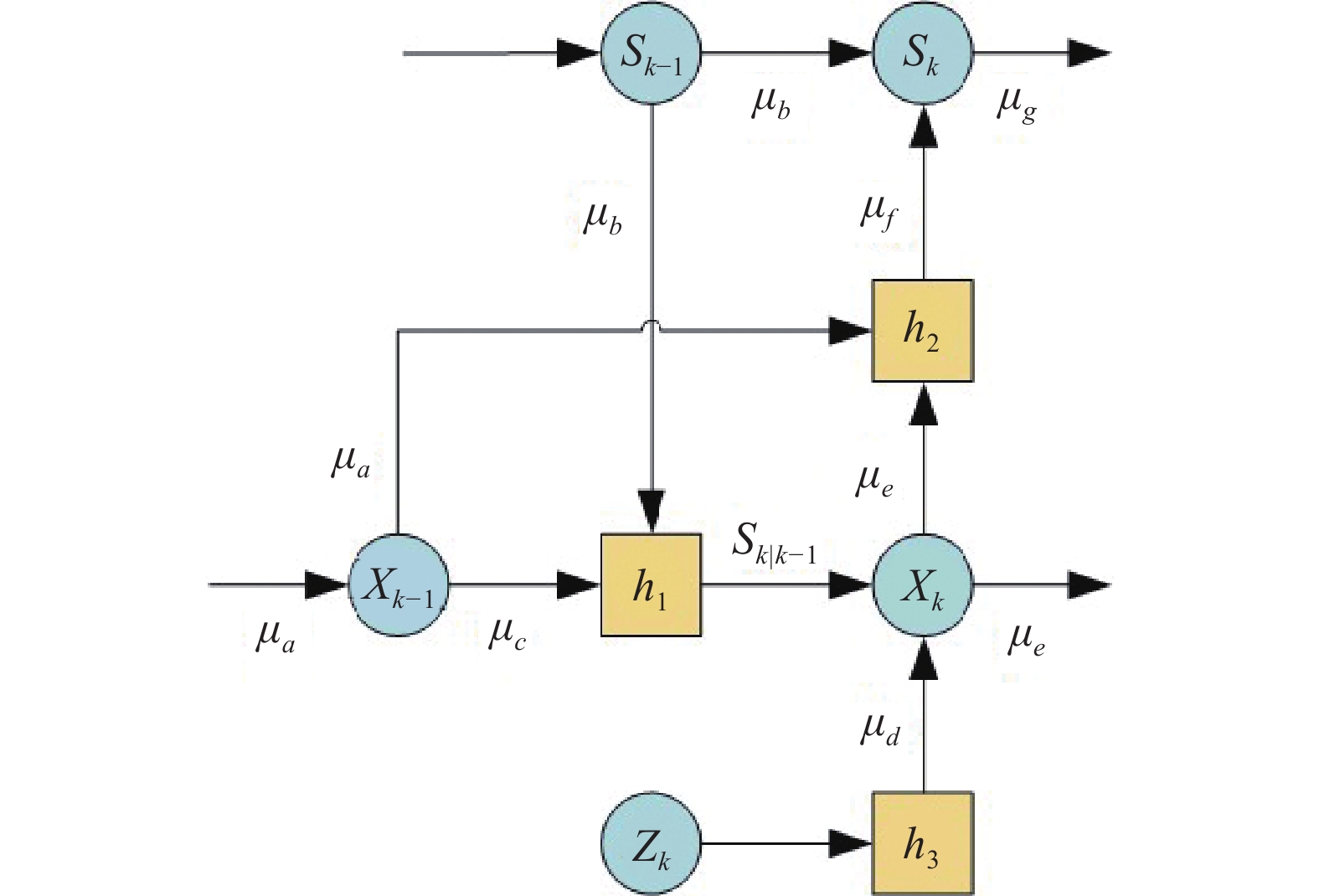
Table 1
Experimental initial simulation parameters"
| Axis | F1 | F2 | F3 | F4 | F5 |
| x/m | |||||
| y/m | |||||
| z/m |

Fig 6
Comparison of track trajectory"
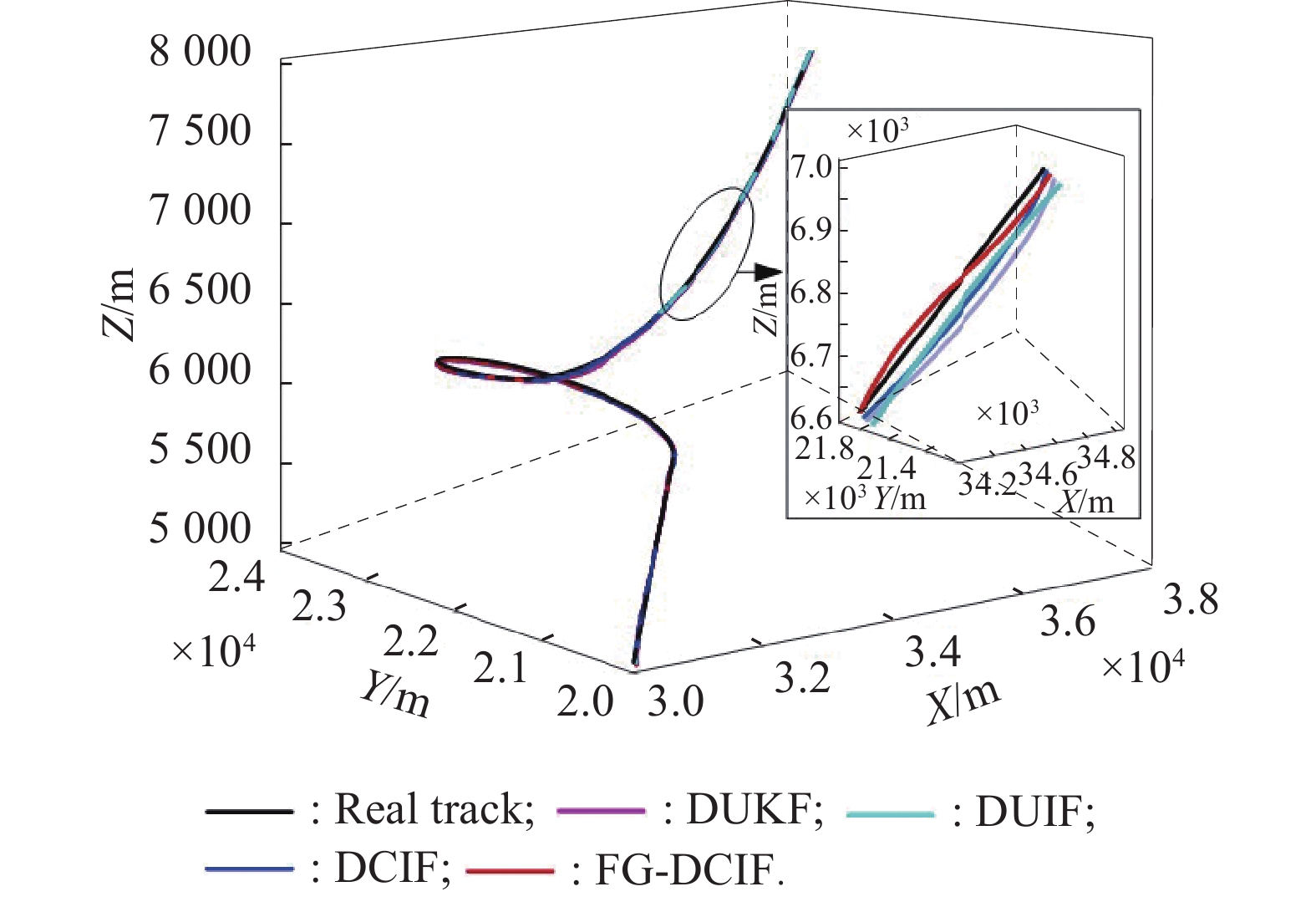
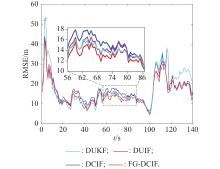
Fig 7
RMSEs of spatial position estimation"
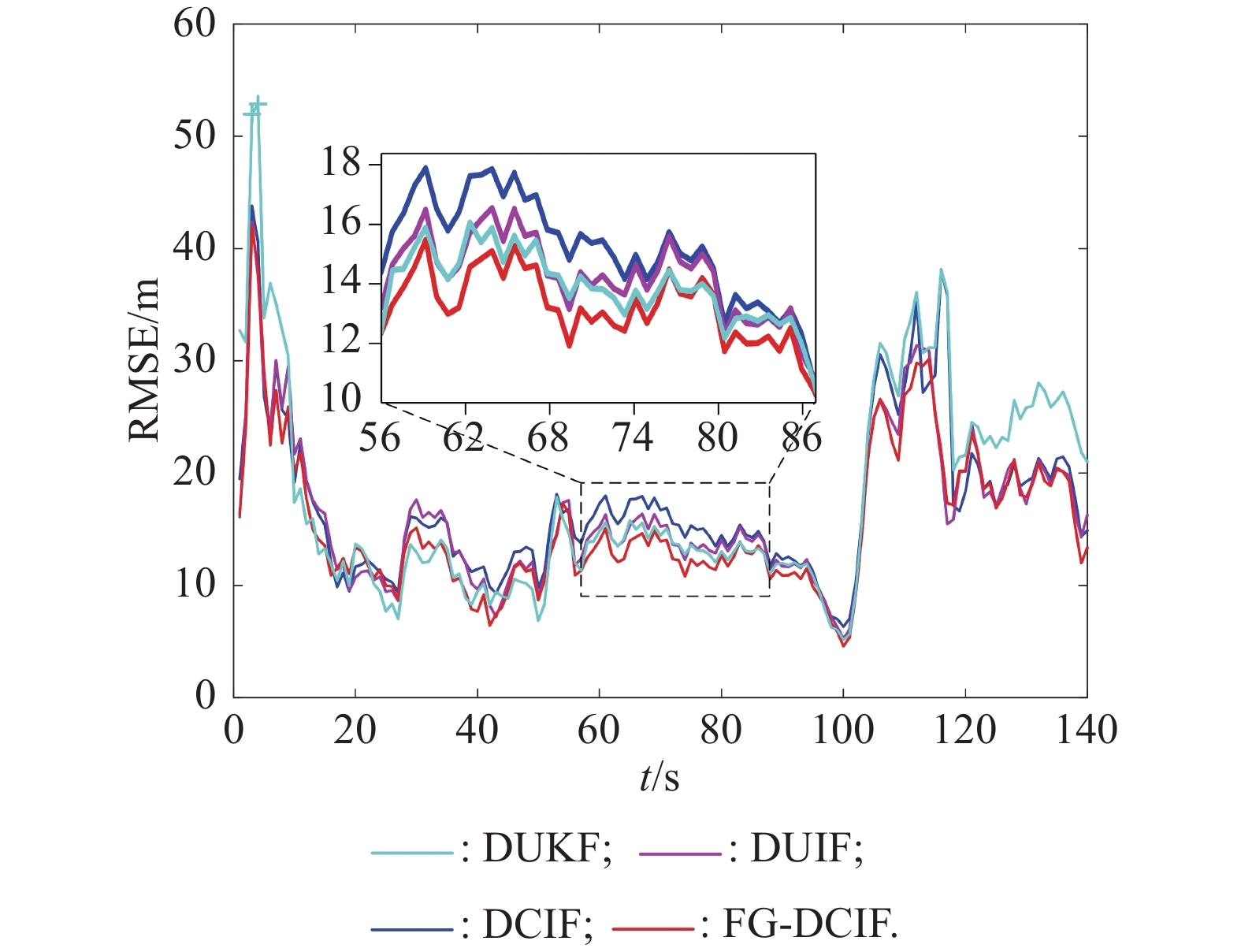
Fig 8
RMSEs of speed estimation"
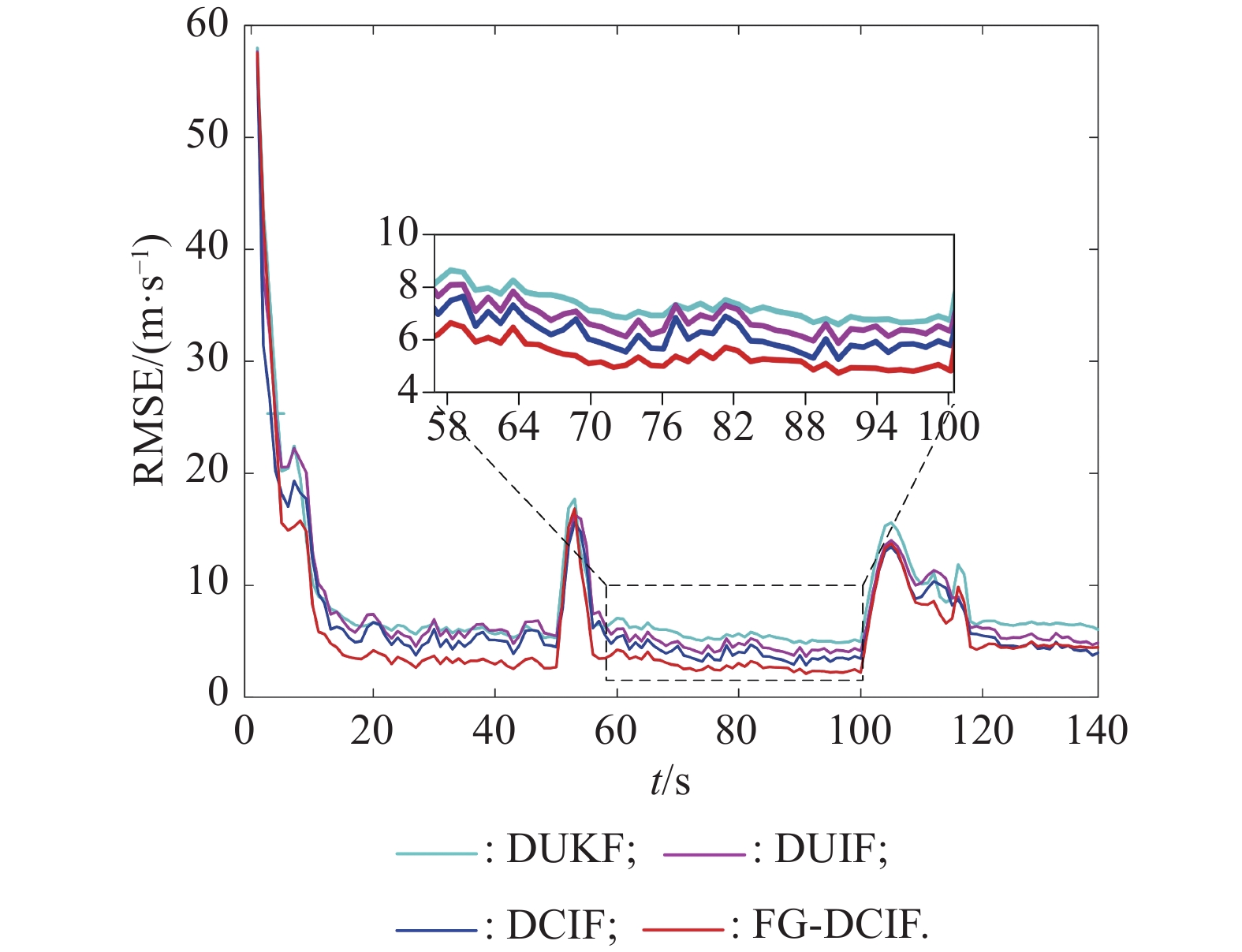
Fig 9
RMSEs of acceleration estimation"
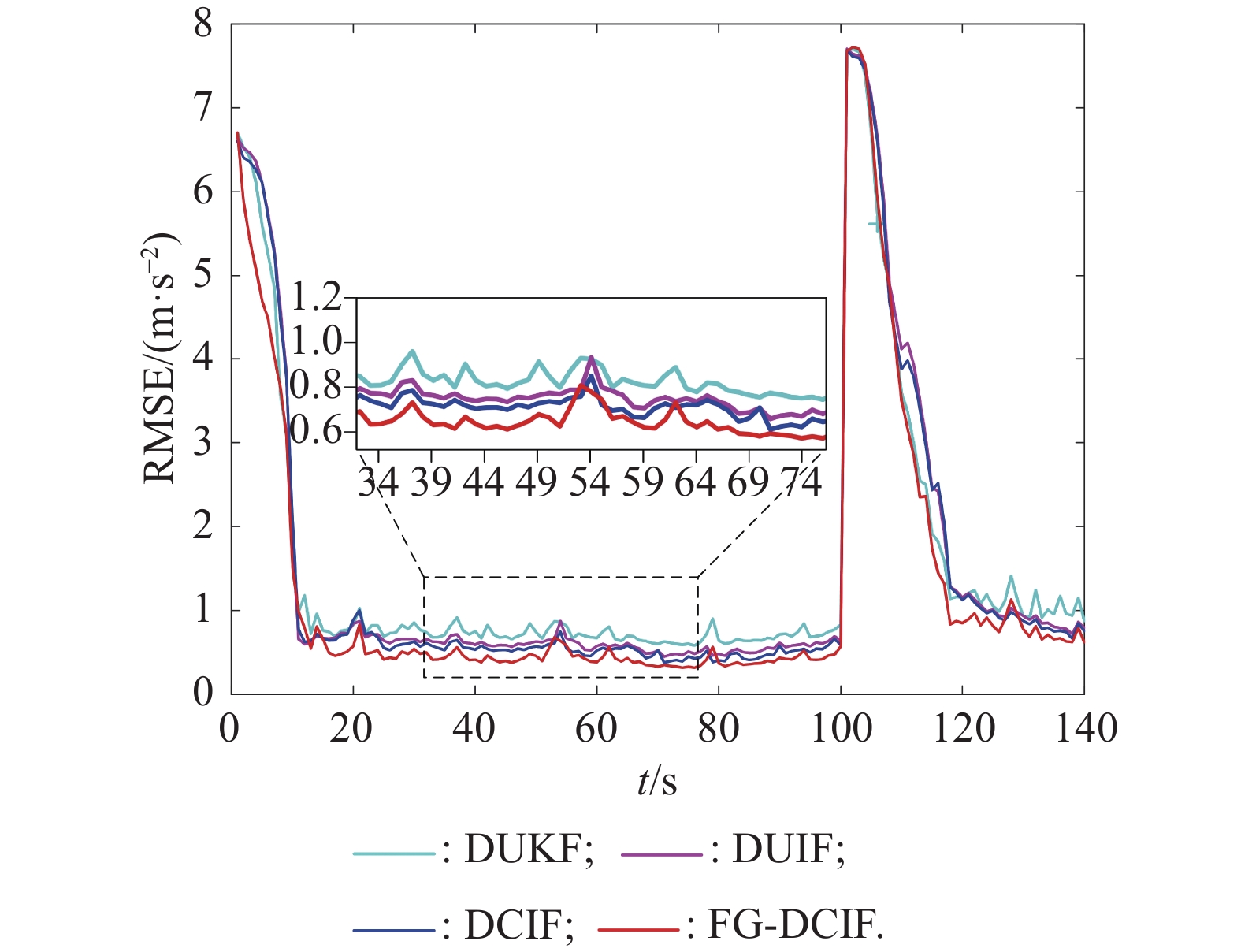
Fig 10
Spatial position estimation curves in three directions"
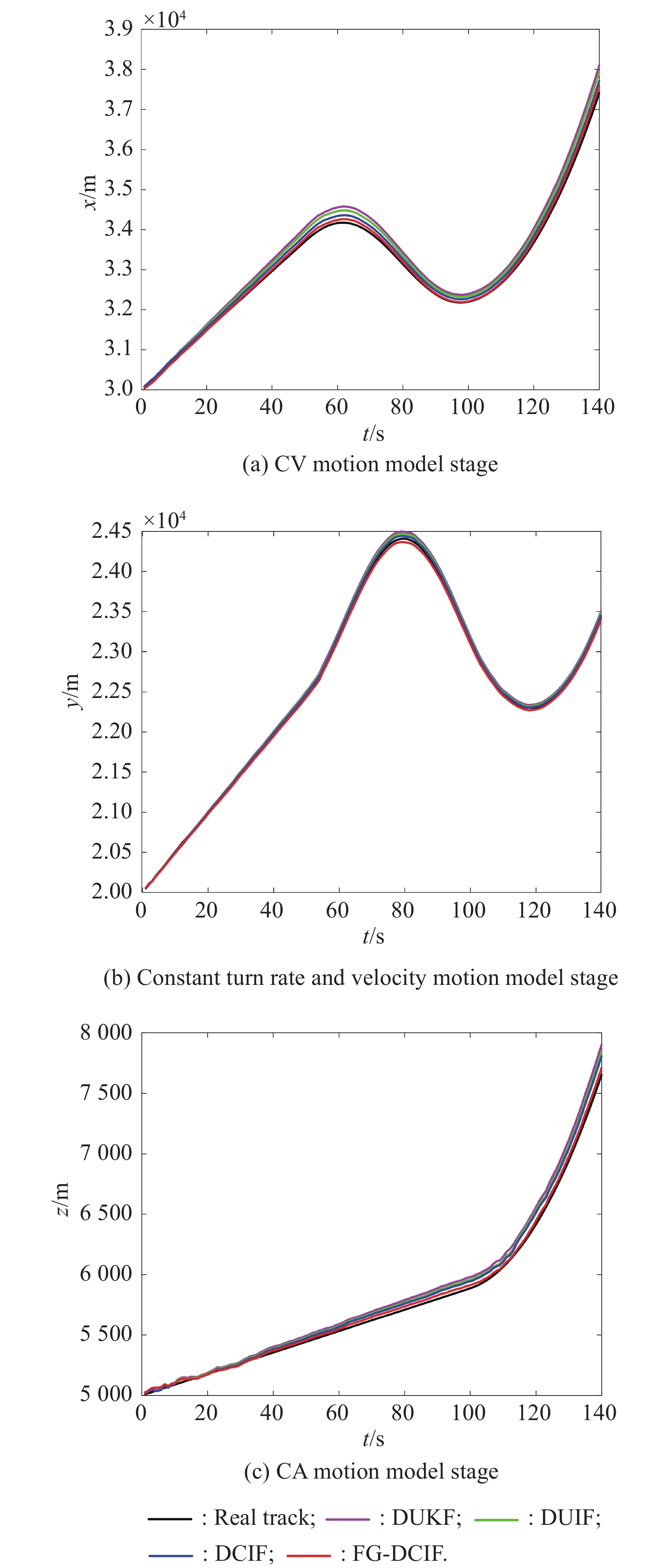
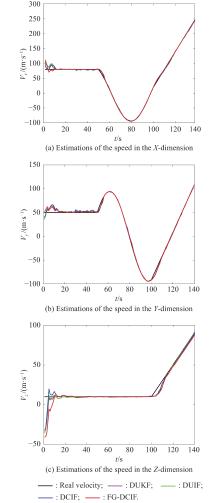
Fig 11
Speed estimation curves in three directions"
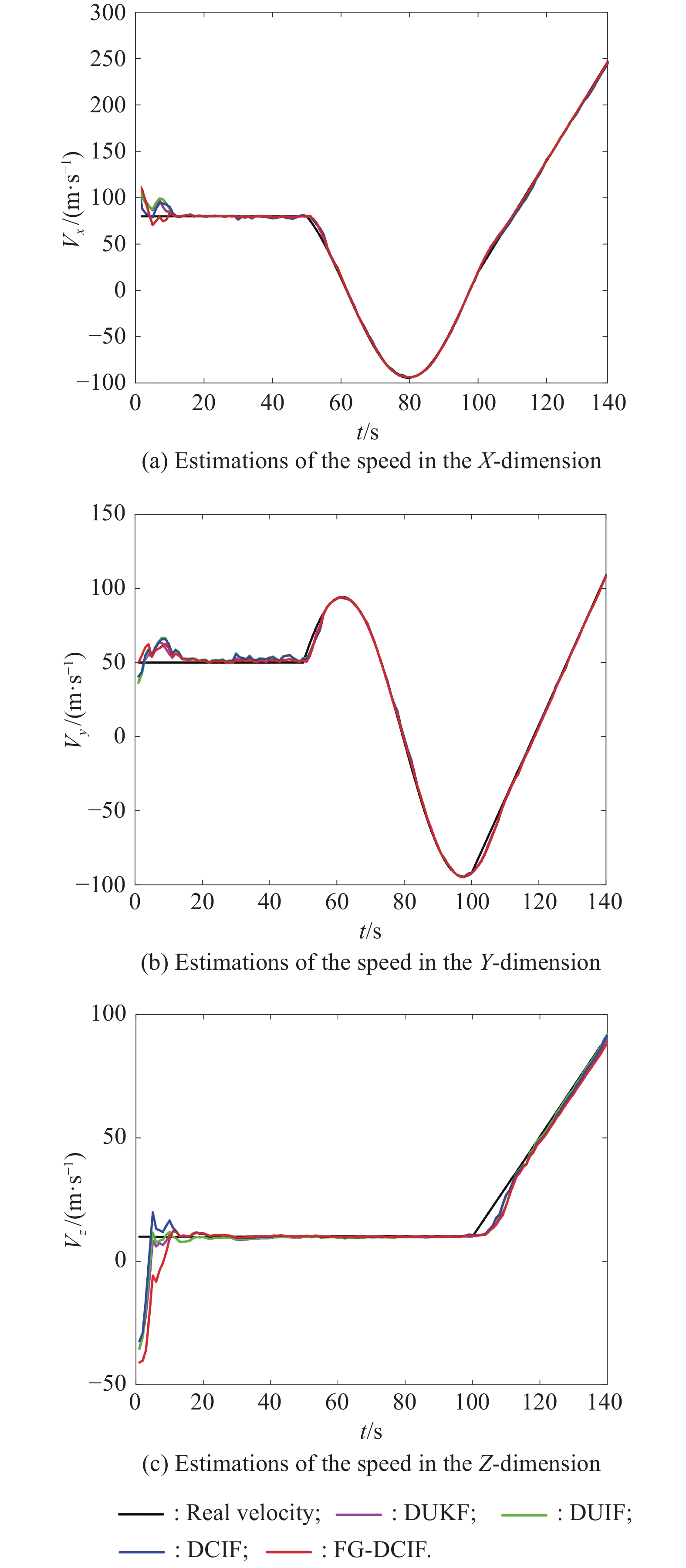
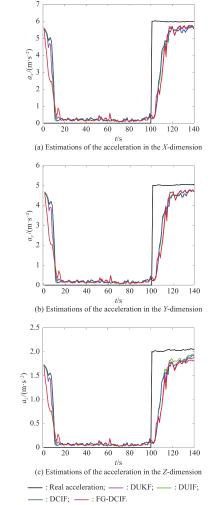
Fig 12
Acceleration estimation curves in three directions"
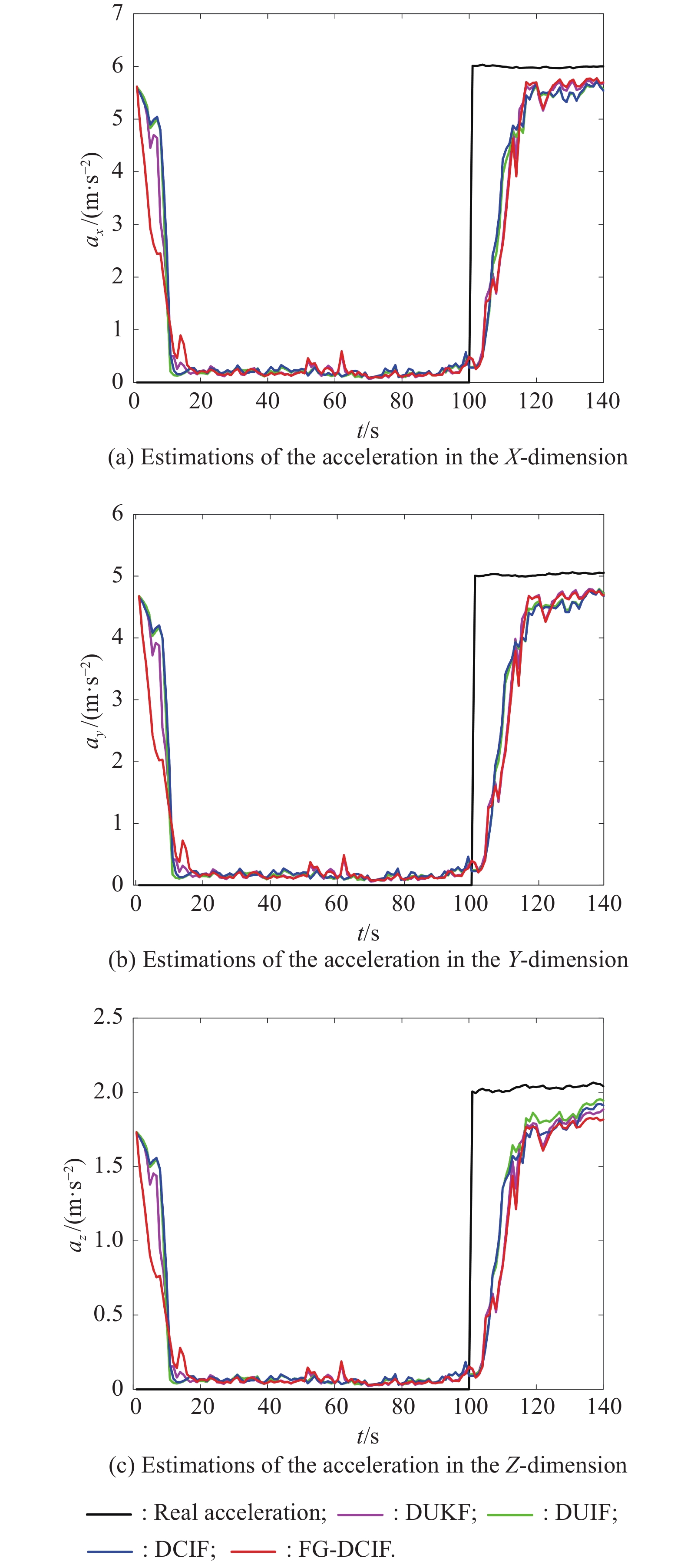

Fig 13
Hot-swappable performance of methods"
| 1 |
DU B, SUN D F, HWANLT I Distributed state estimation for stochastic linear hybrid systems with finite-time fusion. IEEE Trans. on Aerospace and Electronic Systems, 2021, 57 (5): 3084- 3095.
doi: 10.1109/TAES.2021.3082672 |
| 2 |
HAN X Y, LIU M Q, ZHANG S L, et al A multi-node cooperative bearing-only target passive tracking algorithm via UWSNs. IEEE Sensors Journal, 2019, 19 (22): 10609- 10623.
doi: 10.1109/JSEN.2019.2931885 |
| 3 | YU Y H Consensus-based distributed mixture Kalman filter for maneuvering target tracking in wireless sensor networks. IEEE Trans. on Vehicular Technology, 2015, 65 (10): 8669- 8681. |
| 4 |
ZHONG S, PENG B, OUYANG L Q, et al A pseudolinear maximum correntropy Kalman filter framework for bearings-only target tracking. IEEE Sensors Journal, 2023, 23 (17): 19524- 19538.
doi: 10.1109/JSEN.2023.3283863 |
| 5 |
HAN B, HUANG H Q, LEI L, et al An improved IMM algorithm based on STSRCKF for maneuvering target tracking. IEEE Access, 2019, 7, 57795- 57804.
doi: 10.1109/ACCESS.2019.2912983 |
| 6 |
ZANG H W, XIE W X Constrained unscented Kalman filtering for bearings-only maneuvering target tracking. Chinese Journal of Electronics, 2020, 29 (3): 501- 507.
doi: 10.1049/cje.2020.02.006 |
| 7 |
ZHAO M, LI Y, HAO G Multi-sensor information fusion predictive control algorithm. International Journal of Multimedia and Ubiquitous Engineering, 2016, 11 (4): 49- 58.
doi: 10.14257/ijmue.2016.11.4.06 |
| 8 |
HAO G, SUN S Distributed fusion cubature Kalman filters for nonlinear systems. International Journal of Robust and Nonlinear Control, 2019, 29 (17): 5979- 5991.
doi: 10.1002/rnc.4709 |
| 9 |
HUANG Z H, MARELLI D, XU Y, et al Distributed target tracking using maximum likelihood Kalman filter with non-linear measurements. IEEE Sensors Journal, 2021, 21 (24): 27818- 27826.
doi: 10.1109/JSEN.2021.3125153 |
| 10 | WANG Y, WANG X G, CUI N G. Hybrid consensus based distributed pseudo-measurement information filter for small UAVs tracking in wireless sensor network. IET Radar, Sonar & Navigation, 2020, 14(4): 556–563. |
| 11 |
WEI Q, SU P, ZHOU L, et al Online tracking of maneuvering target trajectory based on chaotic time series prediction. Entropy, 2022, 24 (11): 1668.
doi: 10.3390/e24111668 |
| 12 |
ZHOU Y, ZHENG Z, HUANG J B, et al Distributed maximum correntropy cubature information filtering for tracking unmanned aerial vehicle. IEEE Sensors Journal, 2023, 23 (9): 9925- 9935.
doi: 10.1109/JSEN.2023.3261180 |
| 13 |
FARAHI F, YAZDI H S Probabilistic Kalman filter for moving object tracking. Signal Processing: Image Communication, 2020, 82, 115751.
doi: 10.1016/j.image.2019.115751 |
| 14 |
CHENG M, AZIZ M R K, MATSUMOTO T Integrated factor graph algorithm for DOA-based geolocation and tracking. IEEE Access, 2020, 8, 49989- 49998.
doi: 10.1109/ACCESS.2020.2979510 |
| 15 |
ZHANG H Y, ZHANG Z W AOA-based three-dimensional positioning and tracking using the factor graph technique. Symmetry, 2020, 12 (9): 1400.
doi: 10.3390/sym12091400 |
| 16 |
OLIVEIRA H, DIAS S S, DASILVABRUNO M G Cooperative terrain navigation using hybrid GMM/SMC message passing on factor graphs. IEEE Trans. on Aerospace and Electronic Systems, 2020, 56 (5): 3958- 3970.
doi: 10.1109/TAES.2020.2985316 |
| 17 | MOVAGHATI S, ARDAKANI M Particle-based message passing algorithm for inference problems in wireless sensor networks. IEEE Sensors Journal, 2010, 11 (3): 745- 754. |
| 18 |
MA X S, LIU X X, LI C L, et al A post-processing algorithm based on factor graph optimization for autonomous underwater vehicle integrated navigation. Transactions of the Institute of Measurement and Control, 2023, 45 (4): 595- 607.
doi: 10.1177/01423312221109880 |
| 19 |
LI C Y, GUO S X Characteristic evaluation via multi-sensor information fusion strategy for spherical underwater robots. Information Fusion, 2023, 95, 199- 214.
doi: 10.1016/j.inffus.2023.02.024 |
| 20 |
WANG R, DU J X, XIONG Z, et al Hierarchical collaborative navigation method for UAV swarm. Journal of Aerospace Engineering, 2021, 34 (1): 04020097.
doi: 10.1061/(ASCE)AS.1943-5525.0001216 |
| 21 |
LI H, SUN H M, ZHOU R H, et al Hybrid TDOA/FDOA and track optimization of UAV swarm based on a-optimality. Journal of Systems Engineering and Electronics, 2023, 34 (1): 149- 159.
doi: 10.23919/JSEE.2023.000008 |
| 22 |
NA K I, CHOI S, KIM J H Adaptive target tracking with interacting heterogeneous motion models. IEEE Trans. on Intelligent Transportation Systems, 2022, 23 (11): 21301- 21313.
doi: 10.1109/TITS.2022.3191814 |
| 23 | LI G C, KONG L G, YI W, et al Multiple model Poisson multi-Bernoulli mixture filter for maneuvering targets. IEEE Sensors Journal, 2020, 21 (3): 3143- 3154. |
| 24 |
LI L Q, XIE W X, LIU Z X Auxiliary truncated particle filtering with least-square method for bearings-only maneuvering target tracking. IEEE Trans. on Aerospace and Electronic Systems, 2016, 52 (5): 2562- 2567.
doi: 10.1109/TAES.2016.150048 |
| 25 | YANG X, ZHANG W A, YU L, et al Sequential Gaussian approximation filter for target tracking with nonsynchronous measurements. IEEE Trans. on Aerospace and Electronic Systems, 2018, 55 (1): 407- 418. |
| 26 |
CHEN Z, FU W X, ZHANG R T, et al Distributed cubature information filtering method for state estimation in bearing-only sensor network. Entropy, 2024, 26 (3): 236.
doi: 10.3390/e26030236 |
| 27 |
SONG Y, HSU L T Tightly coupled integrated navigation system via factor graph for UAV indoor localization. Aerospace Science and Technology, 2021, 108, 106370.
doi: 10.1016/j.ast.2020.106370 |
| 28 |
GOLA K K, GUPTA B Underwater sensor networks: comparative analysis on applications, deployment and routing techniques. IET Communications, 2020, 14 (17): 2859- 2870.
doi: 10.1049/iet-com.2019.1171 |
| 29 | ZHU X D, LAI J Z, ZHOU B C, et al. Weight factor graph co-location method for UAV formation based on navigation performance evaluation. IEEE Sensors Journal, 23(12): 13037–13051. |
| 30 |
SHI H R, LU F X, WANG H Y, et al Optimal observation configuration of UAVs based on angle and range measurements and cooperative target tracking in three-dimensional space. Journal of Systems Engineering and Electronics, 2020, 31 (5): 996- 1008.
doi: 10.23919/JSEE.2020.000074 |
| 31 |
LV Y W, YANG G H Centralized and distributed adaptive cubature information filters for multi-sensor systems with unknown probability of measurement loss. Information Sciences, 2023, 630, 173- 189.
doi: 10.1016/j.ins.2023.02.035 |
| 32 |
DENG Q, CHEN G, LU H X Adaptive sample-size unscented particle filter with partitioned sampling for three dimensional high-maneuvering target tracking. Applied Sciences, 2019, 9 (20): 4278.
doi: 10.3390/app9204278 |
| 33 |
VASUHI S, VAIDEHI V Target tracking using interactive multiple model for wireless sensor network. Information Fusion, 2016, 27, 41- 53.
doi: 10.1016/j.inffus.2015.05.004 |
| 34 |
JIANG H N, CAI Y L Adaptive fifth-degree cubature information filter for multi-sensor bearings-only tracking. Sensors, 2018, 18 (10): 3241.
doi: 10.3390/s18103241 |
| 35 |
LI L Q, SUN Y, LIU Z X Maximum fuzzy correntropy Kalman filter and its application to bearings-only maneuvering target tracking. International Journal of Fuzzy Systems, 2021, 23, 405- 418.
doi: 10.1007/s40815-020-00956-0 |
| [1] | Keyi LI, Zhengkun GUO, Gongjian ZHOU. State estimation in range coordinate using range-only measurements [J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 497-510. |
| [2] | Muhammad WASIM, Ahsan ALI. Airship aerodynamic model estimation using unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1318-1329. |
| [3] | Haoran SHI, Faxing LU, Hangyu WANG, Junfei XU. Optimal observation configuration of UAVs based on angle and range measurements and cooperative target tracking in three-dimensional space [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 996-1008. |
| [4] | Kai ZHANG, Jiajun XIONG, Tingting FU. Coupled dynamic model of state estimation for hypersonic glide vehicle [J]. Journal of Systems Engineering and Electronics, 2018, 29(6): 1284-1292. |
| [5] | Junyi Zuo and Xiaoping Zhong. Particle filter for nonlinear systems with multi-sensor asynchronous random delays [J]. Journal of Systems Engineering and Electronics, 2017, 28(6): 1064-1071. |
| [6] | Nan Wu, Bin Li, Hua Wang, Liang Hou, and Jingming Kuang. Parametric message passing-based relative navigation in joint tactical information distribution system [J]. Systems Engineering and Electronics, 2016, 27(1): 81-. |
| [7] | Wei Wang, Dan Li, and Liping Jiang. Best linear unbiased estimation algorithm with Doppler measurements in spherical coordinates [J]. Systems Engineering and Electronics, 2016, 27(1): 128-. |
| [8] | Fang Deng, Jie Chen, and Chen Chen. Adaptive unscented Kalman filter for parameter and state estimation of nonlinear high-speed objects [J]. Journal of Systems Engineering and Electronics, 2013, 24(4): 655-665. |
| [9] | Mei Liu, Jianguo Yu, Ling Yang, Lu Yao, and Yaosheng Zhang. Consecutive tracking for ballistic missile based on bearings-only during boost phase [J]. Journal of Systems Engineering and Electronics, 2012, 23(5): 700-707. |
| [10] | Guo Lei, Tang Bin & Liu Gang. Posterior Cramer-Rao lower bounds for bearing-only tracking [J]. Journal of Systems Engineering and Electronics, 2008, 19(1): 27-32. |
| [11] | Zhan Ronghui, Wang Ling, Wan Jianwei & Sun Zhongkang. Passive target tracking using marginalized particle filter [J]. Journal of Systems Engineering and Electronics, 2007, 18(3): 503-508. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||