
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (2): 305-311.doi: 10.23919/JSEE.2022.000031
• ELECTRONICS TECHNOLOGY • Previous Articles Next Articles
Yu LI( ), Honglan WU(), Youchao SUN*()
), Honglan WU(), Youchao SUN*()
Received:2021-03-15
Online:2022-05-06
Published:2022-05-06
Contact:
Youchao SUN
E-mail:893792696@qq.com;wuhonglan@126.com;sunyc@nuaa.deu.cn
About author:Supported by:Yu LI, Honglan WU, Youchao SUN. Improved adaptive genetic algorithm based RFID positioning[J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 305-311.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Passive tag array"
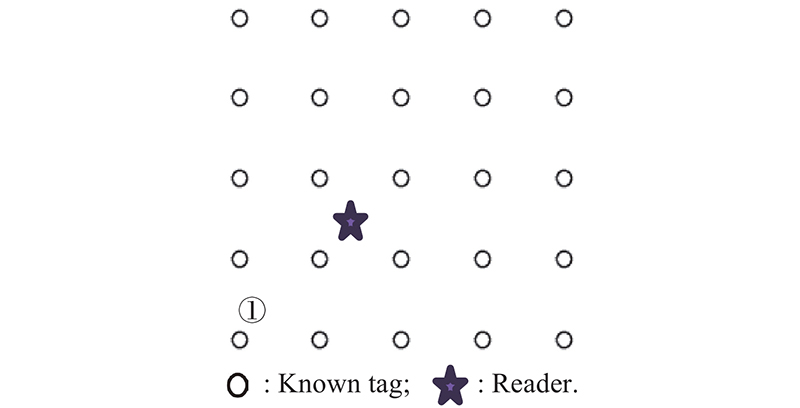
Fig 2
Feasible solution area"
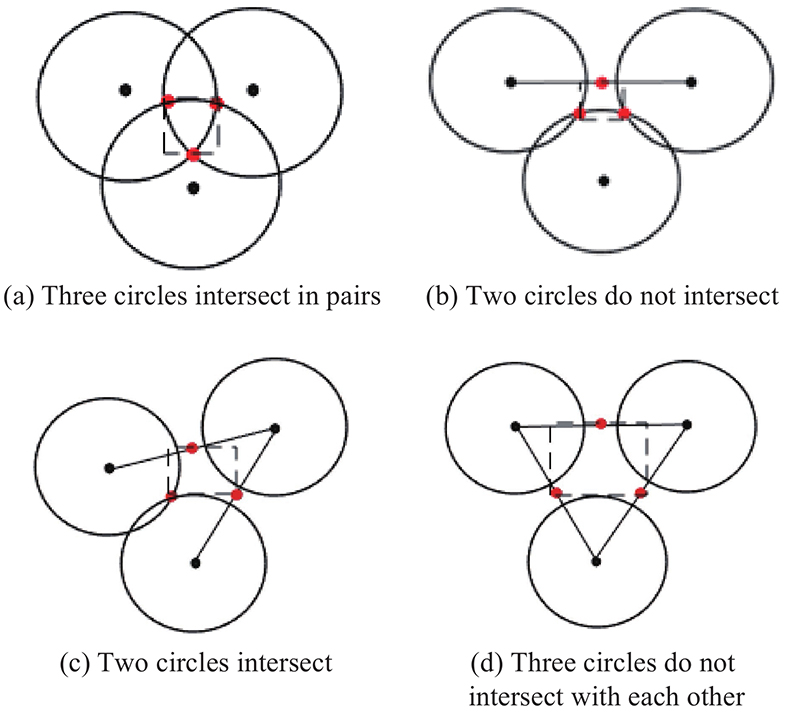

Fig 3
Algorithm work flow"
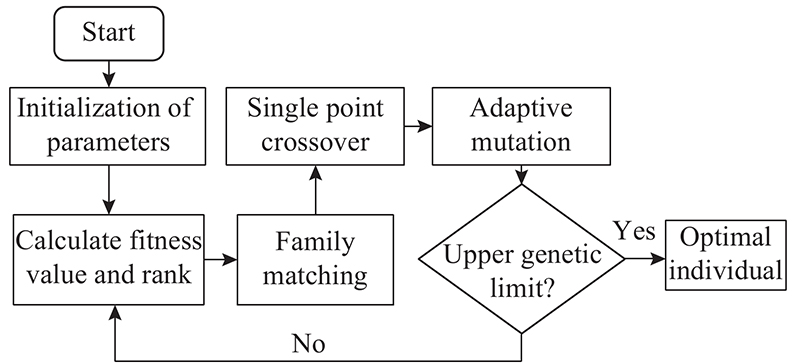

Fig 4
Part of the experimental setup"
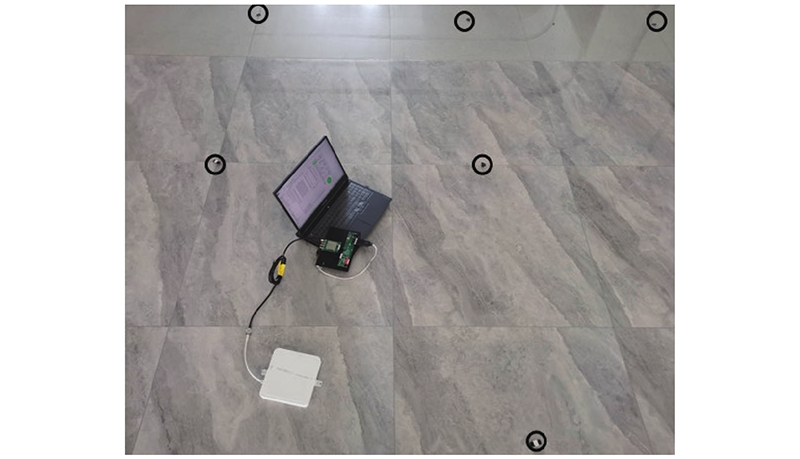
Table 1
Hardware specifications"
| Parameter | value |
| Operating voltage/V | 3.6?5.5 |
| Storage temperature/°C | ?20?85 |
| Spectrum range/MHz | 860?960 |
| Output power/dBm | 0?30 |
| Acceptance sensitivity/dBm | <?85 |
| Tag buffer | 1000 sheets |
| Baud rate/bps | 115 200 |
| Chip model | MR6P |
| Protocol standard | ISO 18000-6C |
| Spectrum range/MHz | 902-928 |

Fig 5
Test cell"
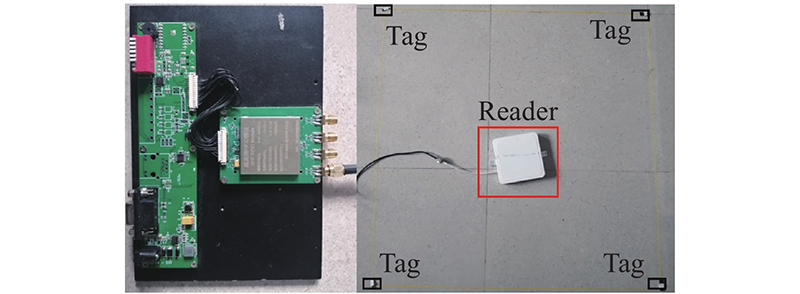
Fig 6
Positioned points"
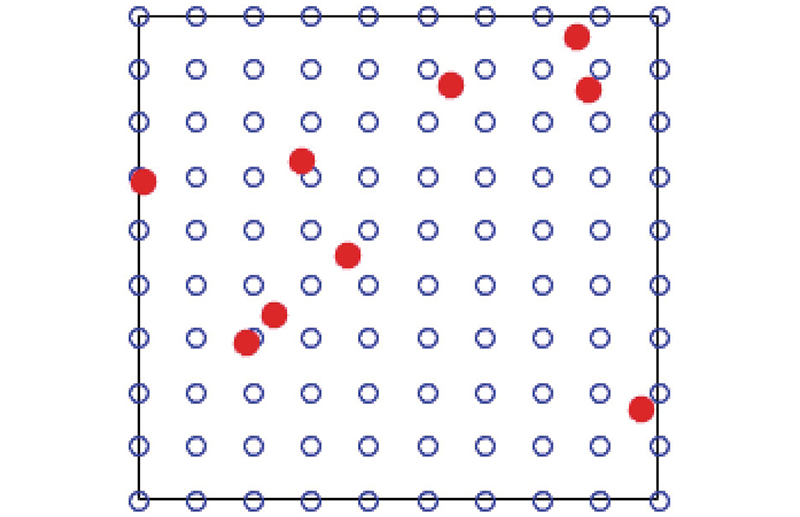
Fig 7
Fitted curve"
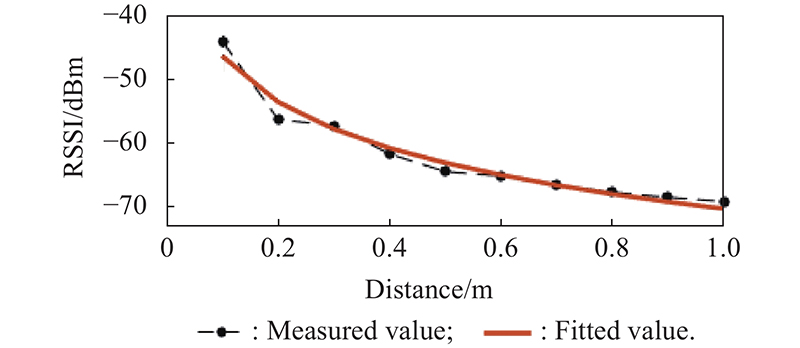
Fig 8
Iteration process"
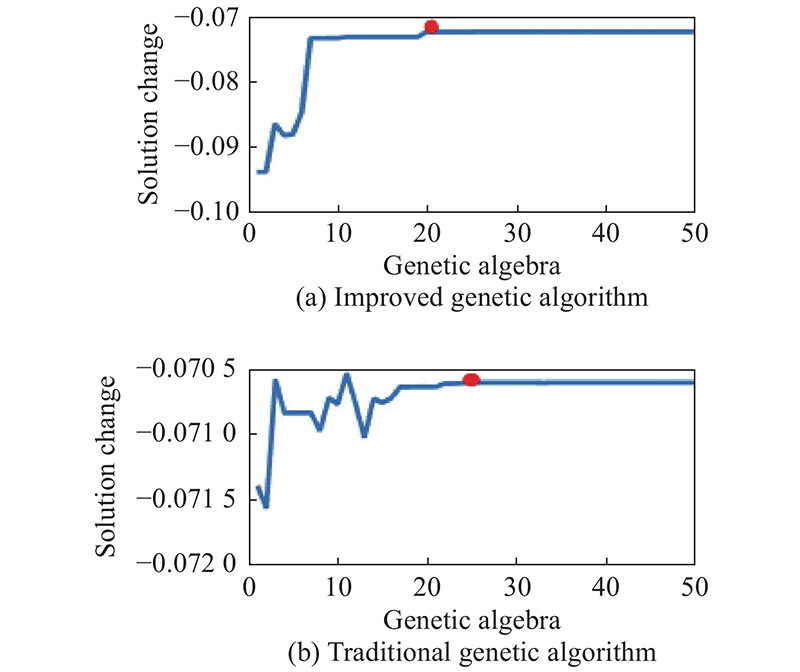
Table 2
Positioning results"
| Actual coordinate | Improved algorithm | Trilateral ranging algorithm | E/cm | E1/cm | E2/cm | |||||
| Improved | Trilateral | Improved | Trilateral | Improved | Trilateral | |||||
| (2.35,3.45) | (2.3219,3.4998) | (2.2893,3.4131) | 5.72 | 7.90 | 2.81 | 6.10 | 4.98 | 3.66 | ||
| (7.60,8.60) | (7.5667,8.5701) | (7.5153,8.5473) | 4.48 | 9.98 | 3.33 | 8.47 | 2.99 | 5.27 | ||
| (7.78,7.63) | (7.7674,7.6900) | (7.7304,7.7063) | 6.13 | 9.10 | 1.26 | 4.96 | 6.00 | 7.63 | ||
| (9.40,4.30) | (9.3612,4.3500) | (9.3499,4.3719) | 6.33 | 8.76 | 3.88 | 5.01 | 5.00 | 7.19 | ||
| (3.62,4.55) | (3.6735,4.5687) | (3.6841,4.6012) | 5.67 | 8.20 | 5.35 | 6.41 | 1.87 | 5.12 | ||
| (0.10,5.90) | (0.1319,5.8620) | (0.2100,5.8340) | 4.96 | 12.83 | 3.19 | 11.00 | 3.80 | 6.60 | ||
| (1.90,2.93) | (1.8933,2.8933) | (1.8700,2.8602) | 3.73 | 7.59 | 0.67 | 3.00 | 3.67 | 6.97 | ||
| (5.40,7.70) | (5.3626,7.7247) | (5.4261,7.7295) | 4.48 | 3.94 | 3.74 | 2.61 | 2.47 | 2.95 | ||
| (2.85,6.30) | (2.8000,6.2544) | (2.7804,6.2386) | 6.76 | 9.28 | 5.00 | 6.96 | 4.55 | 6.14 | ||
| (8.72,1.68) | (8.7673,1.6418) | (8.7986,1.6372) | 6.08 | 8.95 | 4.73 | 7.86 | 3.82 | 4.28 | ||
Fig 9
Point error"
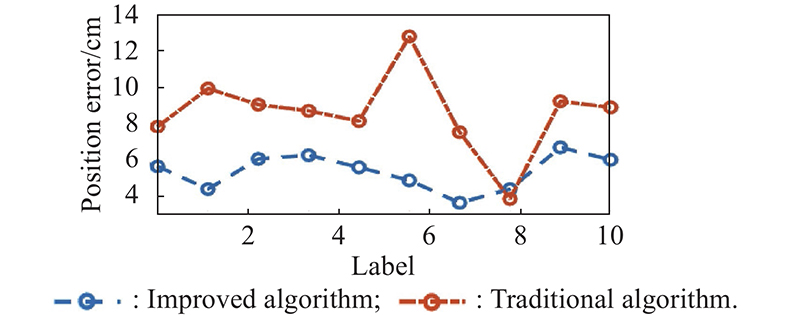
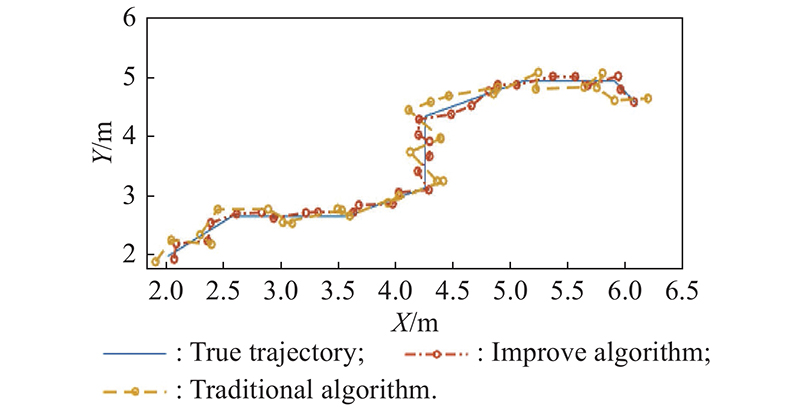
Fig 10
Trajectory positioning"
| 1 |
LIU F, LIU J, YIN Y Q, et al Survey on WiFi-based indoor positioning techniques. IET Communications, 2020, 14 (9): 1372- 1383.
doi: 10.1049/iet-com.2019.1059 |
| 2 |
ALSENY D, LU Z X, ZHAO X H Wireless indoor localization using passive RFID tags. Procedia Computer Science, 2019, 155, 210- 217.
doi: 10.1016/j.procs.2019.08.031 |
| 3 | MONTASR A, MOSELHI O RFID indoor location identification for construction projects. Automation in Construction, 2014, 39, 167- 179. |
| 4 | MUGAHID O, YUN T G Indoor distance estimation for passive UHF RFID tag based on RSSI and RCS. Measurement, 2018, 127 (10): 425- 430. |
| 5 | LI C Y, MO L F, ZHANG D K Review on UHF RFID localization methods. IEEE Journal of Radio Frequency Identification, 2019, 3 (4): 205- 215. |
| 6 |
EL-ABSI M, ZHENG F, ABUELHAIJA A, et al Indoor large-scale MIMO-based RSSI localization with low-complexity RFID infrastructure. Sensors, 2020, 20 (14): 3933.
doi: 10.3390/s20143933 |
| 7 | XUE F F, ZHAO J M, LI D G Precise localization of RFID tags using hyperbolic and hologram composite localization algrithm. Computer Communications, 2020, 157, 451- 460. |
| 8 | BIANG L, HUANG H S, WANG A Y, et al Positioning optimization of wireless sensor network based on PSO-BP algorithm. Telecommunications Technology, 2017, 57 (2): 139- 144. |
| 9 |
EBERHARDT M, LEHNER M, ASCHER A, et al An active UHF RFID localization system for fawn saving. Advances in Radio Science, 2015, 13, 87- 94.
doi: 10.5194/ars-13-87-2015 |
| 10 | DELLAERT F, FOX D, BURGARD W Monte Carlo localization for mobile robots. Proc. of the IEEE International Conference on Robotics and Automation, 2002, 1322- 1328. |
| 11 | XU C L, GAO J L, ZHANG X H, et al Bluetooth indoor positioning algorithm based on K-means and SVM. Sensors and Microsystems, 2019, 38 (2): 139- 141. |
| 12 | LAN Q Q, XIAO B X RFID positioning based on grid-based density peak clustering algorithm. Journal of Electronic Measurement and Instrument, 2018, 32 (10): 73- 78. |
| 13 | AMENDOLA S, LODATO R, MANZARI S, et al RFID technology for IoT-based personal healthcare in smart spaces. Internet of Things Journal, 2014, 1 (2): 144- 152. |
| 14 | CUI X R, WANG M Y, LI J, et al Indoor Wi-Fi positioning algorithm based on location fingerprint. Mobile Networks and Applications, 2021, 26 (4): 146- 155. |
| 15 |
MAKKI A, SIDDIG A, SAAD M, et al Survey of WiFi positioning using time-based techniques. Computer Networks, 2015, 88, 218- 233.
doi: 10.1016/j.comnet.2015.06.015 |
| 16 |
MAZHAR F, KHA M G, SALLBERG B Precise indoor positioning using UWB: a review of methods, algorithms and implementations. Wireless Personal Communications, 2017, 97 (3): 4467- 4491.
doi: 10.1007/s11277-017-4734-x |
| 17 |
ZHAO Y H, WONG W C, FENG T Y, et al Efficient and scalable calibration-free indoor positioning using crowdsourced data. IEEE Internet of Things Journal, 2020, 7 (1): 160- 175.
doi: 10.1109/JIOT.2019.2944929 |
| 18 | YANG X L, LIU Z, NIE W, et al AP optimization for Wi-Fi indoor positioning based on RSS feature fuzzy mapping and clustering. IEEE Access, 2020, 8, 153599- 153609. |
| 19 | YANG B, GUO L Y, GUO R J, et al A novel trilateration algorithm for RSSI-based indoor localization. IEEE Sensors Journal, 2020, 20 (14): 8164- 8172. |
| 20 | CHEN H N, SHU R, SUN S Y. Research and realization of RFID-based indoor positioning technology. Beijing Surveying and Mapping, 2016, 5: 65-68, 87. |
| 21 |
HAMDIA K M, ZHUANG X Y, RABCZUK T An efficient optimization approach for designing machine learning models based on genetic algorithm. Neural Computing and Applications, 2021, 33 (6): 1923- 1933.
doi: 10.1007/s00521-020-05035-x |
| 22 |
KANNOUF N, LABBI M, CHAHID Y, et al A key establishment attempt based on genetic algorithms applied to RFID technologies. International Journal of Information Security and Privacy, 2021, 15 (3): 33- 47.
doi: 10.4018/IJISP.2021070103 |
| 23 | PARGAS R P, HARROLD M J, PECK R R Test-data generation using genetic algorithms. Software Testing Verification and Reliability, 2015, 9 (4): 263- 282. |
| 24 | CANTUPAZ E. On random numbers and the performance of genetic algorithms. http://ssrn.com/abstract=3125461. |
| 25 | SHI L, LIU Y Indoor positioning algorithm for mobile nodes based on ultra-wideband signals. Journal of China Academy of Electronics, 2019, 14 (11): 1159- 1163. |
| 26 | SHIOZAWA K, MIYANO T Symbolic diffusion entropy rate of chaotic time series as a surrogate measure for the largest Lyapunov exponent. Physical Review E, 2019, 100 (3/1): 032221. |
| 27 | LIU L F, MIAO S X, HU H P, et al N-phase logistic chaotic sequence and its application for image encryption. IET Signal Processing, 2017, 10 (9): 1096- 1104. |
| 28 |
MAULIK U, BANDYOPADHYAY S Genetic algorithm-based clustering technique. Pattern Recognition, 2000, 33 (9): 1455- 1465.
doi: 10.1016/S0031-3203(99)00137-5 |
| 29 |
CHAKKARAVARTHY A P, CHANDRASEKAR A Anatomical region segmentation method from dermoscopic images of pigmented skin lesions. International Journal of Imaging Systems and Technology, 2020, 30 (3): 636- 652.
doi: 10.1002/ima.22404 |
| 30 | DEVAPRIYA W, BABU C, SRIHARI T Real time speed bump detection using Gaussian filtering and connected component approach. Circuits and Systems, 2016, 7 (9): 2168- 2175. |
| 31 |
DING F, SHI Y X, ZHU G P, et al Real-time estimation for the parameters of Gaussian filtering via deep learning. Journal of Real-Time Image Processing, 2020, 17 (1): 17- 27.
doi: 10.1007/s11554-019-00907-5 |
| [1] | Yongbin YU, Nijing YANG, Chenyu YANG, Tashi NYIMA. Memristor bridge-based low pass filter for image processing [J]. Journal of Systems Engineering and Electronics, 2019, 30(3): 448-455. |
| [2] | Xiaoyu Li, Jing Jin, Yi Shen, and Yipeng Liu. Noise level estimation method with application to EMD-based signal denoising [J]. Systems Engineering and Electronics, 2016, 27(4): 763-. |
| [3] | Fei Gao, Achang Ru, Jun Wang, and Shiyi Mao. Knowledge-based detection method for SAR targets [J]. Journal of Systems Engineering and Electronics, 2014, 25(4): 573-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||