
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (1): 7-20.doi: 10.23919/JSEE.2021.000002
• ELECTRONICS TECHNOLOGY • Previous Articles Next Articles
Zhao SUN1( ), Chao MA1,*(), Liang WANG2(), Ran MENG3(), Shanshan PEI1()
), Chao MA1,*(), Liang WANG2(), Ran MENG3(), Shanshan PEI1()
Received:2020-02-08
Online:2021-02-25
Published:2021-02-25
Contact:
Chao MA
E-mail:sun.zhao.must@gmail.com;cma@must.edu.mo;wangliang18@baidu.com;ran.meng@smartereye.com;pei.shanshan.must@gmail.com
About author:Supported by:Zhao SUN, Chao MA, Liang WANG, Ran MENG, Shanshan PEI. A deep learning-based binocular perception system[J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 7-20.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
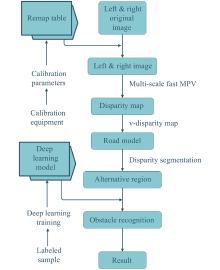
Fig 1
System working flow"
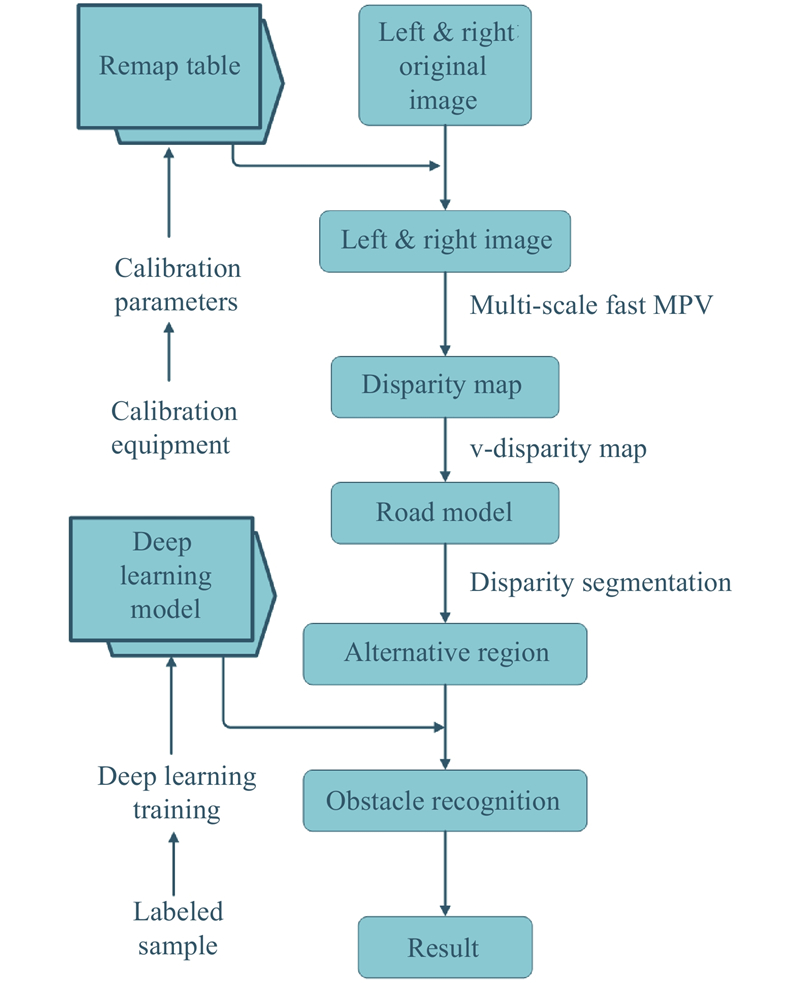
Fig 2
System hardware structure"
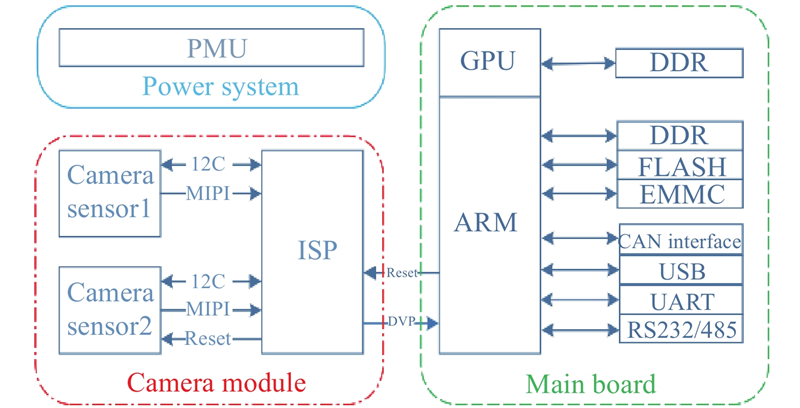
Table 1
System parameters"
| Item | Parameter |
| Baseline/mm | 120 |
| Focus length/mm | 6 |
| Resolution | 640 × 320 |
| DOF/m | 3 ? 100 |
| FOV/(°) | 40 |
| Dynamic range/dB | 120 |
| Data depth/bit | 8 |
| Service voltage/V | 12 |

Fig 3
Assembly position"
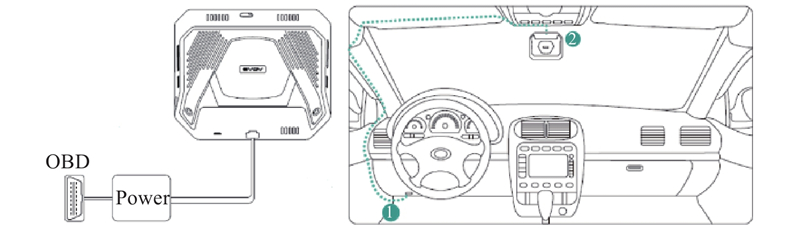
Fig 4
Modules design"
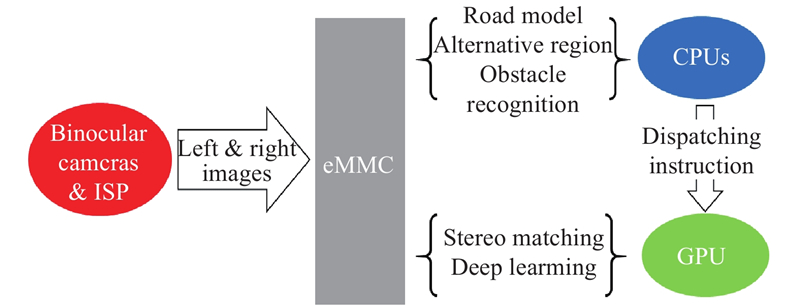

Fig 5
Scale pyramid"
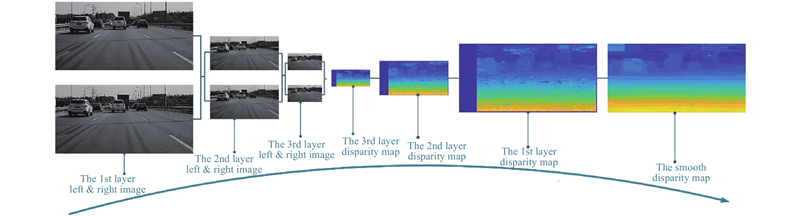

Fig 6
Alternative region"
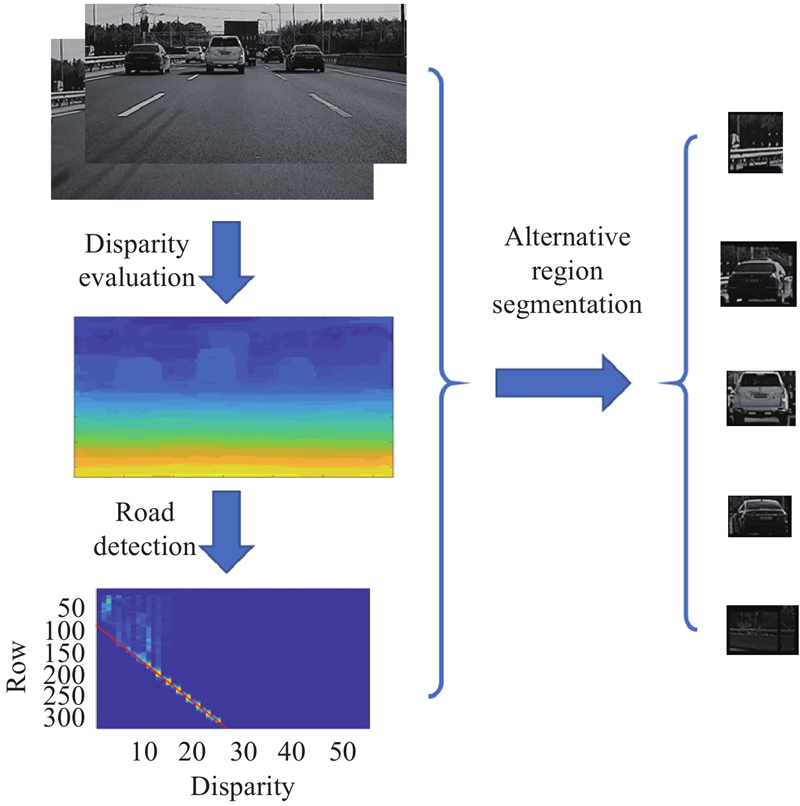
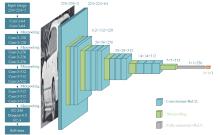
Fig 7
Detector’s configuration based on VGG-Net at the second block diagram"
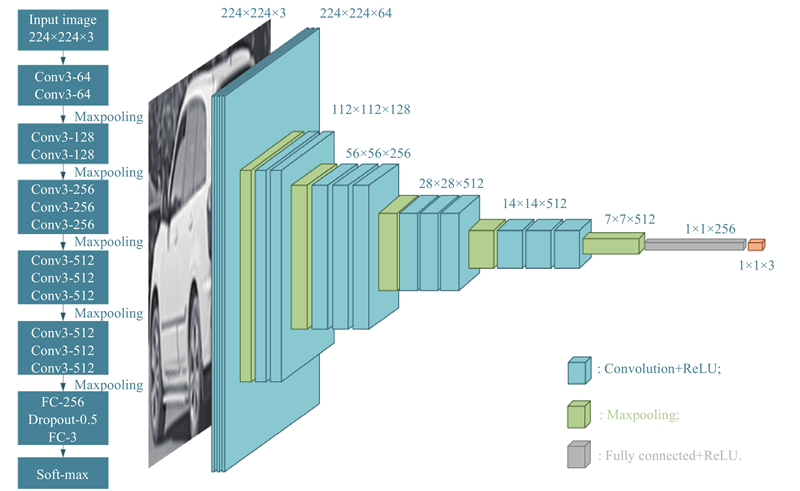

Fig 8
Training sample"
Fig 9
Comparison of feature response"
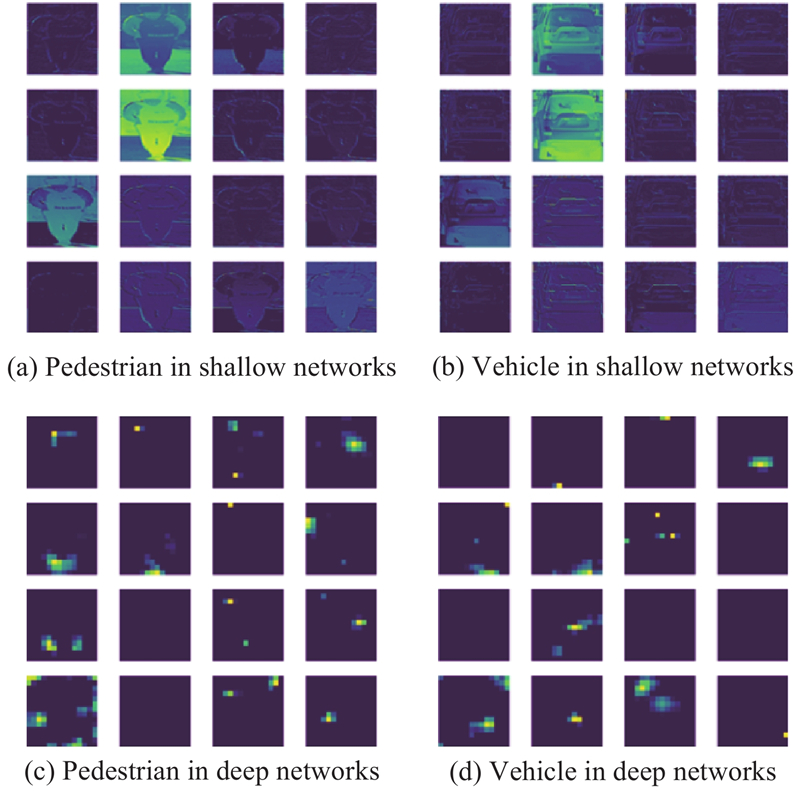
Fig 10
Distributed computation"
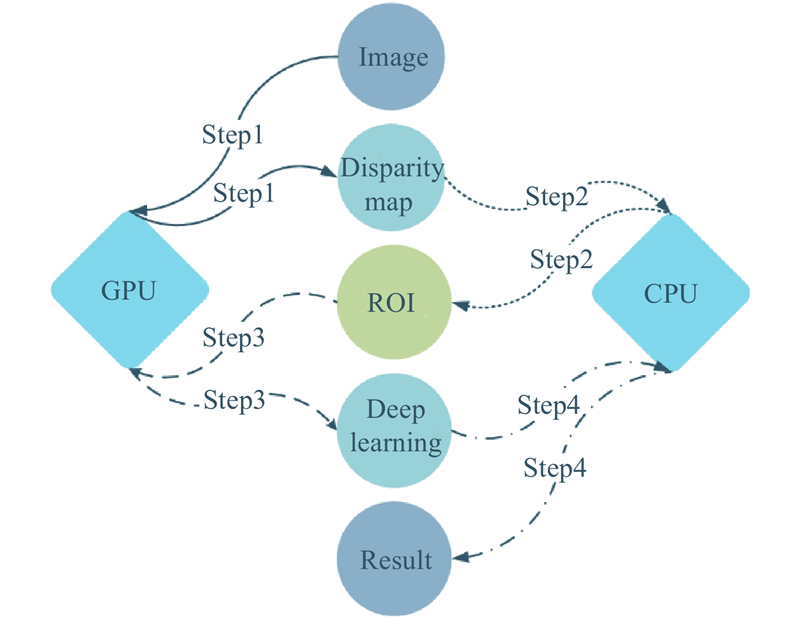

Fig 11
Data flow"
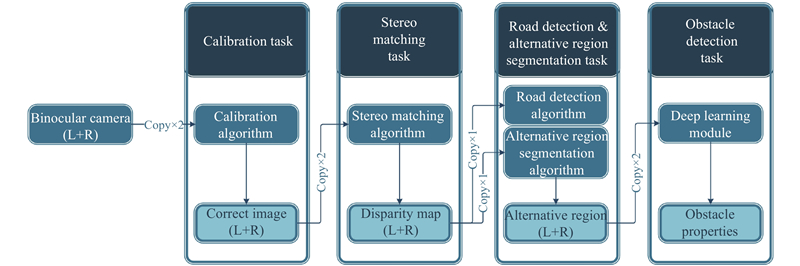
Fig 12
Stereo matching"
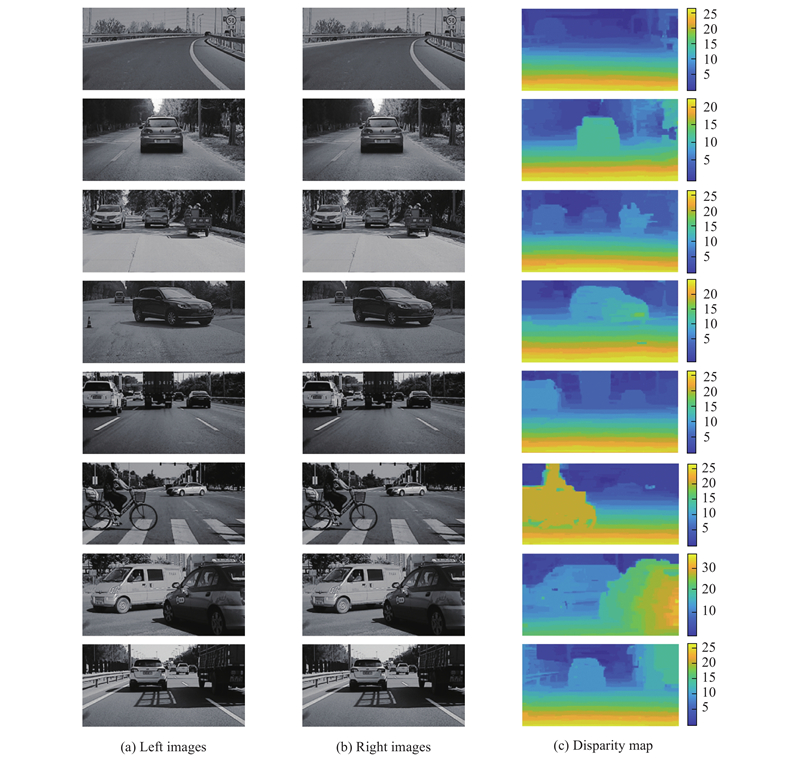
Fig 13
Road model"
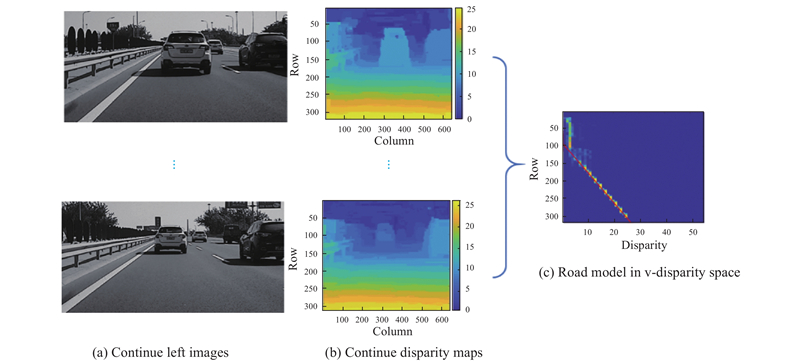
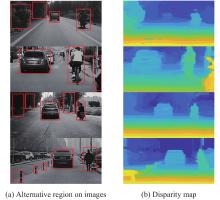
Fig 14
Alternative region"
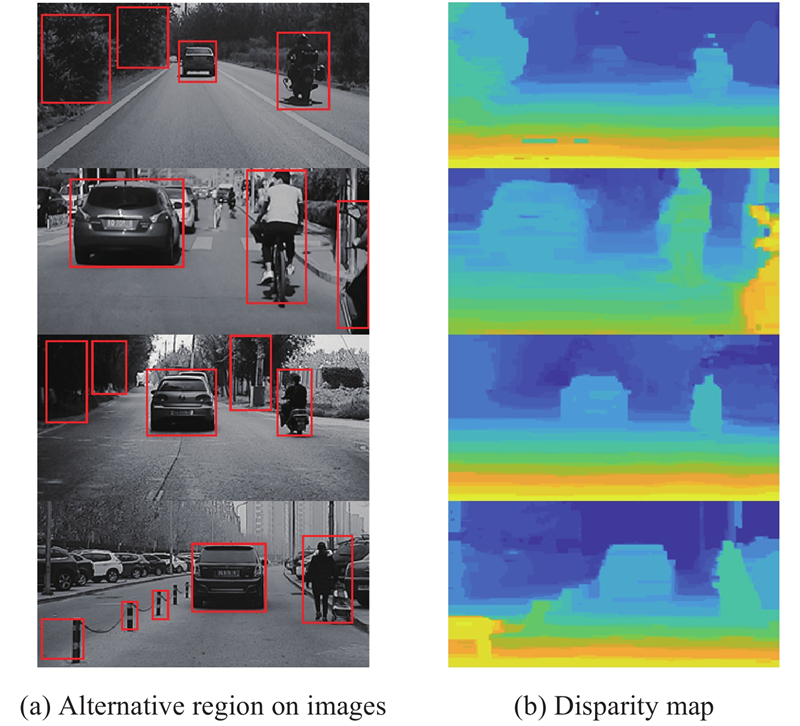
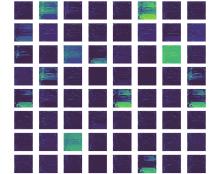
Fig 15
Response results in the first convolution layer (64 feature maps)"
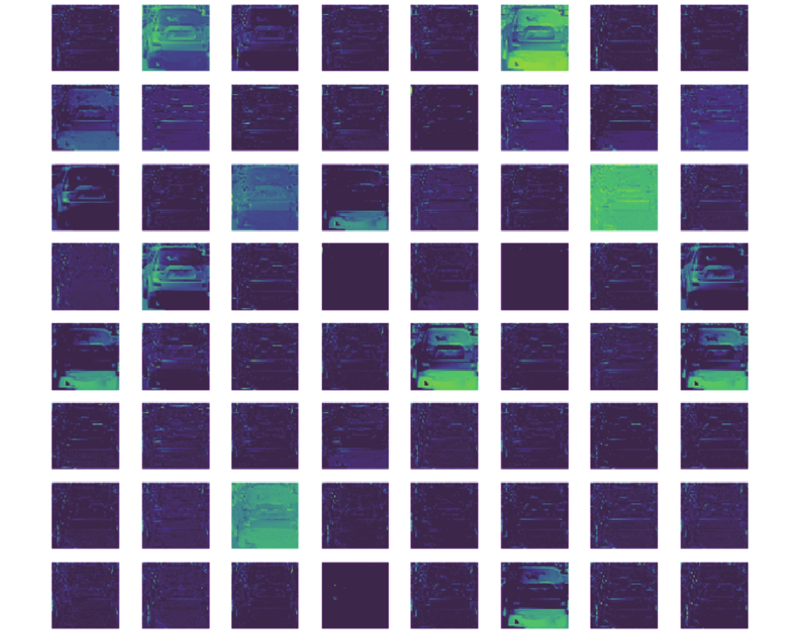
Fig 16
Response results in the last convolution layer (512 feature maps)"

Fig 17
Classification results"

Table 2
Result of deep learning model"
| Result | Label | |||
| Vehicle | Pedestrian | Bike | Others | |
| Vehicle | 351 | 0 | 0 | 27 |
| Pedestrian | 0 | 108 | 17 | 6 |
| Bike | 0 | 14 | 154 | 2 |
| Other | 36 | 8 | 11 | 253 |
| Precision/% | 92.86 | 82.44 | 90.59 | 82.14 |
| Recall/% | 90.70 | 83.08 | 84.62 | 87.85 |
Table 3
End-to-end deep learning networks for obstacle detection % "
| Method | Vehicle | Pedestrian | Bike | Others | |||||||
| Precision | Recall | Precision | Recall | Precision | Recall | Precision | Recall | ||||
| SSD [ | 92.33 | 83.98 | 84.87 | 77.69 | 91.67 | 78.57 | 60.64 | 19.79 | |||
| YOLO [ | 94.17 | 87.60 | 88.79 | 79.23 | 91.18 | 85.16 | 73.13 | 34.03 | |||
| Faster R-CNN [ | 95.43 | 91.73 | 92.00 | 88.46 | 93.21 | 82.97 | 74.23 | 25.00 | |||
| Ours | 92.86 | 90.70 | 82.44 | 83.08 | 90.59 | 84.62 | 82.14 | 87.95 | |||
Table 4
Detection result in different distances % "
| Method | Vehicle | Pedestrian | Bike | |||||
| Near | Far | Near | Far | Near | Far | |||
| SSD [ | 94.49 | 59.13 | 93.27 | 15.38 | 90.48 | 28.57 | ||
| YOLO [ | 95.96 | 67.83 | 91.35 | 30.77 | 95.92 | 40.00 | ||
| Faster R-CNN [ | 94.85 | 84.35 | 97.12 | 53.85 | 93.88 | 37.14 | ||
| Ours | 93.01 | 85.22 | 88.46 | 61.54 | 86.39 | 77.14 | ||
Table 5
Runtime of modules"
| GPU Frequency/ MHz | Stereo matching module/ms | Obstacle extraction module/ms | Operation efficiency/fps | |||||
| Origin MPV algorithm | Our proposed improvement | Origin VGG model | Our proposed improvement | Origin MPV + VGG | Our proposed improvement | |||
| 324 | 241 | 96 | 784 | 265 | 1 | 2.7 | ||
| 852 | 147 | 55 | 431 | 161 | 1.7 | 4.5 | ||
Table 6
Weather and light test % "
| Weather condition | Perception rate |
| Sunny | 96.51 |
| Light rain | 91.04 |
| Heavy rain | 72.15 |
| Snowy | 89.34 |
| Night | 91.77 |
| Backlight | 84.53 |
Table 7
Effect of ambient temperature"
| Ambient temperature/ ℃ | Chip temperature/ ℃ | Power dissipation (full load)/W | Power dissipation (standby)/W |
| 20 | 45?50 | 10 | 3 |
| 50 | 70?80 | 10 | 3 |
| 60 | 80?85 | 10 | 3 |
| 65 | 85?95 | 10 | 3 |
| 1 |
IM J H, IM S H, JEE G I Vertical corner feature based precise vehicle localization using 3D LIDAR in urban area. Sensors, 2016, 16 (8): 1268.
doi: 10.3390/s16081268 |
| 2 | LI B, ZHANG T L, XIA T. Vehicle detection from 3D lidar using fully convolutional network. [2020-01-15]. https://arxiv.org/pdf/1608.07916.pdf. |
| 3 |
HATA A Y, WOLF D F Feature detection for vehicle localization in urban environments using a multilayer lidar. IEEE Trans. on Intelligent Transportation Systems, 2016, 17 (2): 420- 429.
doi: 10.1109/TITS.2015.2477817 |
| 4 |
ALESSANDRETTI G, BROGGI A, CERRI P Vehicle and guard rail detection using radar and vision data fusion. IEEE Trans. on Intelligent Transportation Systems, 2007, 8 (1): 95- 105.
doi: 10.1109/TITS.2006.888597 |
| 5 | KRSTANOVIC C, KELLER S, GROFT E Radar vehicle detection system. US Patent, 2012, 8279107. |
| 6 | LONG Q, XIE Q W, MITA S, et al A real-time dense stereo matching method for critical environment sensing in autonomous driving. Proc. of the IEEE International Conference on Intelligent Transportation Systems, 2014, 853- 860. |
| 7 |
MOIZUMI H, SUGAYA Y, OMACHI M, et al Traffic light detection considering color saturation using in-vehicle stereo camera. Journal of Information Processing, 2016, 24 (2): 349- 357.
doi: 10.2197/ipsjjip.24.349 |
| 8 | WELLER A D, LARSON M L, MCCABE I A, et al Vision system for vehicle. US Patent, 2018, 10053013. |
| 9 | BLAKE R, WILSON H Binocular vision. Vision Research, 2011, 51 (7): 754- 770. |
| 10 | STROBL K H, HIRZINGER G More accurate pinhole camera calibration with imperfect planar target. Proc. of the IEEE International Conference on Computer Vision Workshops, 2011, 1068- 1075. |
| 11 |
XIE Q W, LONG Q, MITA S Integration of optical flow and multi-path-viterbi algorithm for stereo vision. International Journal of Wavelets, Multiresolution and Information Processing, 2017, 15 (3): 1750022.
doi: 10.1142/S0219691317500229 |
| 12 | LUO J H, WU J X. An entropy-based pruning method for CNN compression. [2020-01-15]. https://arxiv.org/pdf/1706.05791.pdf. |
| 13 | WU J X, LENG C, WANG Y H, et al Quantized convolutional neural networks for mobile devices. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016, 4820- 4828. |
| 14 | GELADO I, STONE J E, CABEZAS J, et al. An asymmetric distributed shared memory model for heterogeneous parallel systems. Proc. of the 15th International Conference on Architectural Support for Programming Languages and Operating Systems, 2010: 347–358. |
| 15 | POWER J, BASU A, GU J, et al. Heterogeneous system coherence for integrated CPU-GPU systems. Proc. of the 46th Annual IEEE/ACM International Symposium on Microarchitecture, 2013: 457−467. |
| 16 | VINEET V, NARAYANAN P CUDA cuts: fast graph cuts on the GPU. Proc. of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, 2008, 1- 8. |
| 17 | KIRK D NVIDIA CUDA software and GPU parallel computing architecture. Proc. of the 6th International Symposium on Memory Management, 2007, 103- 104. |
| 18 | XIE Q W, LONG Q, ZHANG L M, et al. A robust real-time computing-based environment sensing system for intelligent vehicle. [2020-02-01]. https://arxiv.org/pdf/2001.09678.pdf. |
| 19 |
ZHAO B J, ZHAO B Y, TANG L B, et al Multi-scale object detection by top-down and bottom-up feature pyramid network. Journal of Systems Engineering and Electronics, 2019, 30 (1): 1- 12.
doi: 10.21629/JSEE.2019.01.01 |
| 20 |
WANG Z, BOVIK A C, SHEIKH H R, et al Image quality assessment: from error visibility to structural similarity. IEEE Trans. on Image Processing, 2004, 13 (4): 600- 612.
doi: 10.1109/TIP.2003.819861 |
| 21 | VIOLA P A, JONES M J. Rapid object detection using a boosted cascade of simple features. Proc. of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2001. DOI:10.1109/CVPR.2001.990517. |
| 22 |
DATE K, NAGI R Level 2 reformulation linearization technique-based parallel algorithms for solving large quadratic assignment problems on graphics processing unit clusters. INFORMS Journal on Computing, 2019, 31 (4): 771- 789.
doi: 10.1287/ijoc.2018.0866 |
| 23 |
LOWE D G Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 2004, 60 (2): 91- 110.
doi: 10.1023/B:VISI.0000029664.99615.94 |
| 24 |
ALTUN M, CELENK M Road scene content analysis for driver assistance and autonomous driving. IEEE Trans. on Intelligent Transportation Systems, 2017, 18 (12): 3398- 3407.
doi: 10.1109/TITS.2017.2688352 |
| 25 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector. [2020-01-15]. https://arxiv.org/pdf/1512.02325.pdf?ref=hackernoon.com. |
| 26 | REDMON J, FARHADI A. YOLOv3: an incremental improvement. [2020-01-15]. https://arxiv.org/pdf/1804.02767.pdf. |
| 27 |
REN S Q, HE K M, GIRSHICK R, et al Faster R-CNN: towards real-time object detection with region proposal networks. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2017, 39 (6): 1137- 1149.
doi: 10.1109/TPAMI.2016.2577031 |
| 28 | SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition. [2020-01-15]. https://arxiv.org/pdf/1409.1556.pdf%20http://arxiv.org/abs/1409.1556.pdf. |
| 29 |
SHIN H C, ROTH H, GAO M C, et al Deep convolutional neural networks for computer-aided detection: CNN architectures, dataset characteristics and transfer learning. IEEE Trans. on Medical Imaging, 2016, 35 (5): 1285- 1298.
doi: 10.1109/TMI.2016.2528162 |
| 30 | KRIZHEVSKY A, SUTSKEVER I, HINTON G E ImageNet classification with deep convolutional neural networks. Proc. of the 25th International Conference on Neural Information Processing Systems, 2012, 1097- 1105. |
| 31 | HINTON G E, SRIVASTAVA N, KRIZHEVSKY A, et al. Improving neural networks by preventing co-adaptation of feature detectors. [2020-01-15]. https://arxiv.org/pdf/1207.0580.pdf. |
| 32 | LIU H, WANG Y L, WANG X, et al Deep learning model of support vector machines with probability output networks. Systems Engineering— Theory and Practice, 2018, 38 (8): 2147- 2154. |
| 33 | IOFFE S, SZEGEDY C. Batch normalization: accelerating deep network training by reducing internal covariate shift. Proc. of the International Conference on Machine Learning, 2015: 448–456. |
| 34 | TAJBAKHSH N, SHIN J Y, GURUDU S R, et al. Convolutional neural networks for medical image analysis: full training or fine tuning? IEEE Trans. on Medical Imaging, 2016, 35(5):1299–1312. |
| 35 |
SPACEY S, WIESEMANN W, KUHN D, et al Robust software partitioning with multiple instantiation. INFORMS Journal on Computing, 2012, 24 (3): 500- 515.
doi: 10.1287/ijoc.1110.0467 |
| 36 |
BOSCHETTI M A, MANIEZZO V, STRAPPAVECCIA F Using GPU computing for solving the two-dimensional guillotine cutting problem. INFORMS Journal on Computing, 2016, 28 (3): 540- 552.
doi: 10.1287/ijoc.2016.0693 |
| 37 |
ZHANG Y F, GAO Q X, GAO L X, et al Imapreduce: a distributed computing framework for iterative computation. Journal of Grid Computing, 2012, 10 (1): 47- 68.
doi: 10.1007/s10723-012-9204-9 |
| 38 | CHEN X, XIE Q W, SHEN L J, et al Morphology-retained non-linear image registration of serial electron microscopy sections. Proc. of the IEEE International Conference on Image Processing, 2018, 3833- 3837. |
| 39 | KSHEMKALYANI A D, SINGHAL M. Distributed computing: principles, algorithms, and systems. Cambridge: Cambridge University Press, 2011. |
| 40 |
LI Z F, LI D, XU X L, et al New normalized LMS adaptive filter with a variable regularization factor. Journal of Systems Engineering and Electronics, 2019, 30 (2): 259- 269.
doi: 10.21629/JSEE.2019.02.05 |
| [1] | Haifen YANG, Hao ZHANG, Houjun WANG, Zhengyang GUO. A novel approach for unlabeled samples in radiation source identification [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 354-359. |
| [2] | Tao YE, Zongyang ZHAO, Jun ZHANG, Xinghua CHAI, Fuqiang ZHOU. Low-altitude small-sized object detection using lightweight feature-enhanced convolutional neural network [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 841-853. |
| [3] | Hongyin SHI, Yue LIU, Jianwen GUO, Mingxin LIU. ISAR autofocus imaging algorithm for maneuvering targets based on deep learning and keystone transform [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1178-1185. |
| [4] | Chuan LIN, Qing CHANG, Xianxu LI. Uplink NOMA signal transmission with convolutional neural networks approach [J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 890-898. |
| [5] | Liangkui LIN, Shaoyou WANG, Zhongxing TANG. Using deep learning to detect small targets in infrared oversampling images [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 947-952. |
| [6] | Chongsheng Zhang, Pengyou Wang, Ke Chen, and Joni-Kristian K¨am¨ ar¨ainen. Identity-aware convolutional neural networks for facial expression recognition [J]. Systems Engineering and Electronics, 2017, 28(4): 784-. |
| [7] | Tian Jinsi & Su Jianbo. Feature point matching of curved surface and robust uncertainty * [J]. Journal of Systems Engineering and Electronics, 2006, 17(2): 355-361. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||