
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (1): 220-227.doi: 10.23919/JSEE.2021.000019
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
FARAJZADEH-DEVIN Mohammad-Ghassem( ), HOSSEINI SANI Seyed Kamal*()
), HOSSEINI SANI Seyed Kamal*()
Received:2020-02-25
Online:2021-02-25
Published:2021-02-25
Contact:
HOSSEINI SANI Seyed Kamal
E-mail:farajzadeh.mgh@stu.um.ac.ir;k.hosseini@um.ac.ir
About author:FARAJZADEH-DEVIN Mohammad-Ghassem, HOSSEINI SANI Seyed Kamal. Enhanced two-loop model predictive control design for linear uncertain systems[J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 220-227.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
Illustration of the concepts of Assumption 1 and Remark 1"
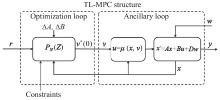
Fig 2
TL-MPC design block diagram"
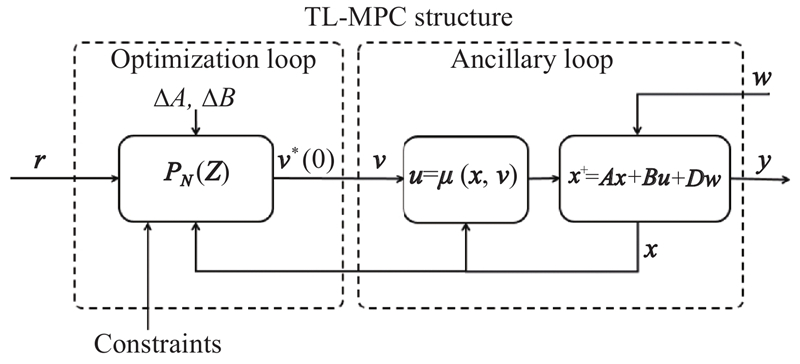
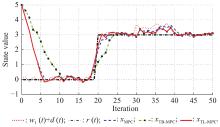
Fig 3
Output of three different methods in illustrative example 1"
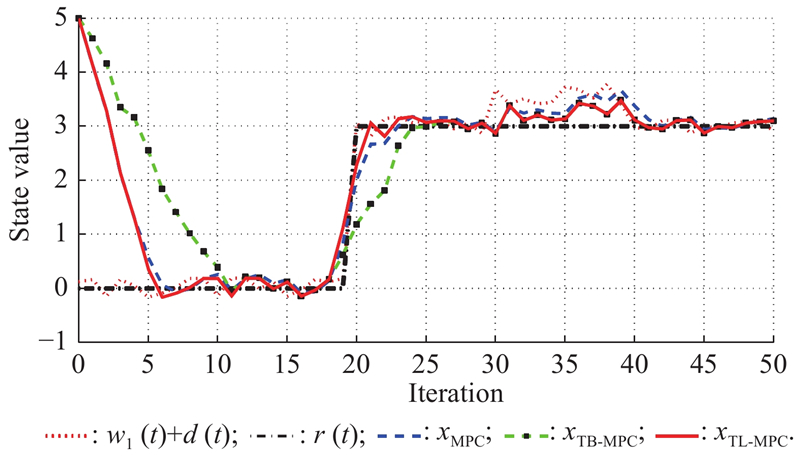
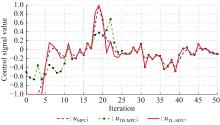
Fig 4
Control signal of three different methods in illustrative example 1"

Table 1
Motor parameters"
| Parameter | Expression | Value |
| va | Rotor/armature voltage | [?5,5] |
| ia | Rotor/armature current | — |
| Ra/Ω | Rotor/armature resistance | 0.5 |
| La/H | Rotor/armature inductance | 1.5×10?3 |
| ie | Stator current | — |
| Kie/(V/(rad/s)) or (N-m/A) | Torque constant | 0.05 |
| θ | Angular position | — |
| ω | Angular velocity | — |
| Tm | Motor torque | — |
| Tl | Load torque | — |
| J/(N-m/(rad/s2)) | Rotor inertia | 2.5×10?4 |
| F/(N-m/(rad/s)) | Viscous friction coefficient | 1.0×10?4 |
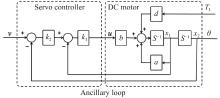
Fig 5
Simple DC servo system block diagram"
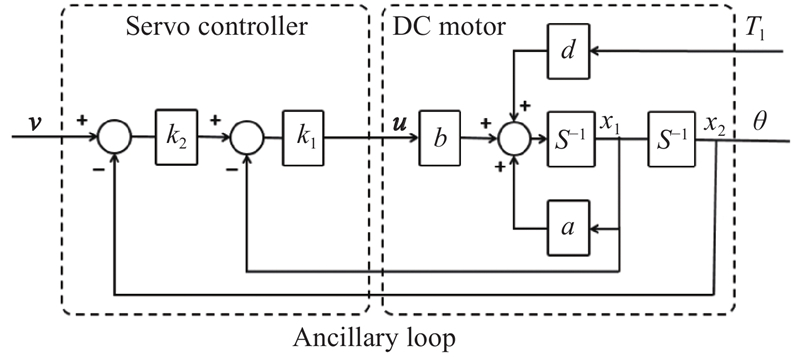
Fig 6
Reference signal r(t) and the angular position x2(t) of the DC motor for the SC and the proposed TL-MPC in illustrative example 2 "
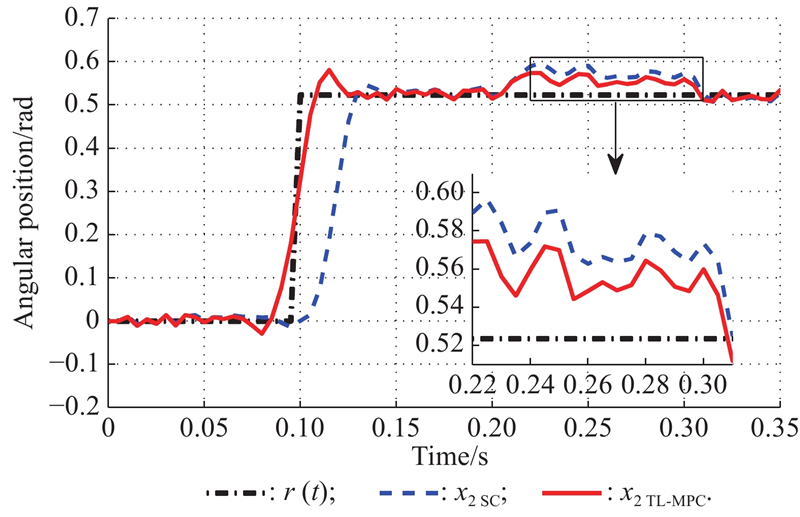
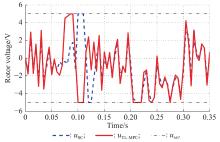
Fig 7
Rotor voltage of the motor u(t) for the SC and the proposed TL-MPC "
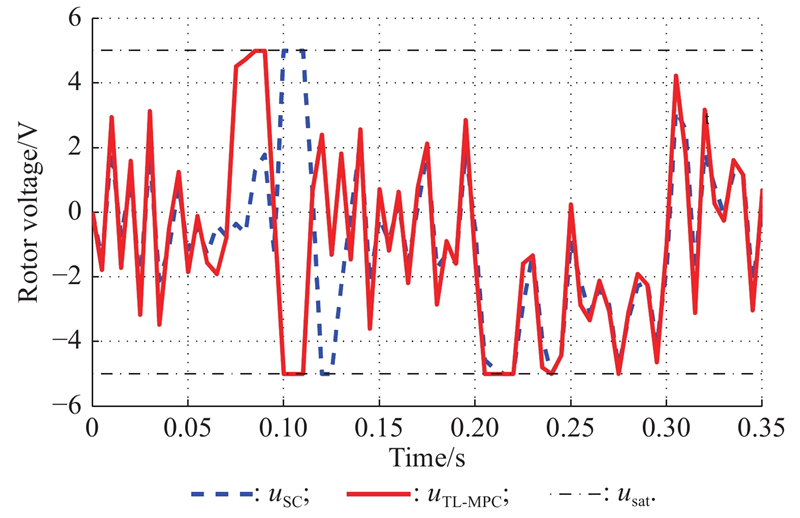
Table 2
Numerical comparison of tracking error ISE and control signal (ISCS) for both illustrative examples"
| Example | Method | ISE | ISE-DI |
| 1 | Nominal MPC [ | 61.82 | 2.43 |
| TB-MPC [ | 103.72 | 1.04 | |
| Proposed TL-MPC | 59.68 | 1.04 | |
| 2 | SC | 1.16 | 0.07 |
| Proposed TL-MPC | 0.14 | 0.05 |
| 1 |
MAYNE D Q Model predictive control: recent developments and future promise. Automatica, 2014, 50 (12): 2967- 2986.
doi: 10.1016/j.automatica.2014.10.128 |
| 2 | GUAY M, ADETOLA V, DEHAAN D. Robust and adaptive model predictive control of nonlinear systems. London: Institution of Engineering and Technology, 2015. |
| 3 |
MAYNE D Q, RAWLINGS J B, RAO C V, et al Constrained model predictive control: stability and optimality. Automatica, 2000, 36 (6): 789- 814.
doi: 10.1016/S0005-1098(99)00214-9 |
| 4 |
MAYNE D Q, SERON M M, RAKOVI S V Robust model predictive control of constrained linear systems with bounded disturbances. Automatica, 2005, 41 (2): 219- 224.
doi: 10.1016/j.automatica.2004.08.019 |
| 5 | MAYNE D Q, KERRIGAN E C. Tube-based robust nonlinear model predictive control. Proc. of the 7th IFAC Symposium on Nonlinear Control Systems, 2007: 110−115. |
| 6 |
FALUGI P, MAYNE D Q Getting robustness against unstructured uncertainty: a tube-based MPC approach. IEEE Trans. on Automatic Control, 2014, 59 (5): 1290- 1295.
doi: 10.1109/TAC.2013.2287727 |
| 7 |
BRUNNER F D, HEEMELS M, ALLGOWER F Robust self-triggered MPC for constrained linear systems: a tube-based approach. Automatica, 2016, 72, 73- 83.
doi: 10.1016/j.automatica.2016.05.004 |
| 8 | SUBRAMANIAN S, LUCIA S, ENGELL S. A novel tube-based output feedback MPC for constrained linear systems. Proc. of the American Control Conference, 2017: 3060−3065. |
| 9 | FESHARAKI S J, KAMALI M, SHEIKHOLESLAM F Adaptive tube-based model predictive control for linear systems with parametric uncertainty. IET Control Theory & Applications, 2017, 11 (17): 2947- 2953. |
| 10 |
GONZALEZ R, FIACCHINI M, ALAMO T, et al Online robust tube-based MPC for time-varying systems: a practical approach. International Journal of Control, 2011, 84 (6): 1157- 1170.
doi: 10.1080/00207179.2011.594093 |
| 11 |
BUMROONGSRI P, KHEAWHOM S Robust model predictive control with time-varying tubes. International Journal of Control, Automation and Systems, 2017, 15, 1479- 1484.
doi: 10.1007/s12555-016-0227-z |
| 12 |
RAKOVIC S V, KERRIGAN E C, KOURAMAS K I, et al Invariant approximations of the minimal robust positively invariant set. IEEE Trans. on Automatic Control, 2005, 50 (3): 406- 410.
doi: 10.1109/TAC.2005.843854 |
| 13 |
AGHAEI S, SHEIKHOLESLAM F, FARINA M, et al An MPC-based reference governor approach for offset-free control of constrained linear systems. International Journal of Control, 2013, 86 (9): 1534- 1539.
doi: 10.1080/00207179.2013.789142 |
| 14 |
GARONE E, NICOTRA M M Explicit reference governor for constrained nonlinear systems. IEEE Trans. on Automatic Control, 2016, 61 (5): 1379- 1384.
doi: 10.1109/TAC.2015.2476195 |
| 15 |
KLAUCO M, KALUZ M, KVASNICA M Real-time implementation of an explicit MPC-based reference governor for control of a magnetic levitation system. Control Engineering Practice, 2017, 60, 99- 105.
doi: 10.1016/j.conengprac.2017.01.001 |
| 16 |
ZHOU J, CANOVA M, SERRANI A Non-intrusive reference governors for over-actuated linear systems. IEEE Trans. on Automatic Control, 2017, 62 (9): 4734- 4740.
doi: 10.1109/TAC.2016.2628167 |
| 17 |
TEDESCO F, OCAMPO-MARTINEZ C, CASAVOLA A, et al Centralized and distributed command governor approaches for water supply systems management. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2018, 48 (4): 586- 595.
doi: 10.1109/TSMC.2016.2612361 |
| 18 |
GARONE E, NICOTRA M, NTOGRAMATZIDIS L Explicit reference governor for linear systems. International Journal of Control, 2018, 91 (6): 1415- 1430.
doi: 10.1080/00207179.2017.1317832 |
| 19 |
GARONE E, D C CAIRANO S, KOLMANOVSKY I Reference and command governors for systems with constraints: a survey on theory and applications. Automatica, 2017, 75, 306- 328.
doi: 10.1016/j.automatica.2016.08.013 |
| 20 |
TATJEWSKI P Advanced control and on-line process optimization in multilayer structures. Annual Review in Control, 2008, 32 (1): 71- 85.
doi: 10.1016/j.arcontrol.2008.03.003 |
| 21 | HUANG G S, WANG S W Two-loop robust model predictive control for the temperature control of air-handling units. HVAC & R Research, 2008, 14 (4): 565- 580. |
| 22 | FERRARA A, INCREMONA G P, MAGNI L. A robust MPC/ISM hierarchical multi-loop control scheme for robot manipulators. Proc. of the 52nd IEEE Conference on Decision and Control, 2013: 3560−3565. |
| 23 |
ALBIN T, RITTER D, LIBERDA N, et al In-vehicle realization of nonlinear MPC for gasoline two-stage turbocharging airpath control. IEEE Trans. on Control Systems Technology, 2018, 26 (5): 1606- 1618.
doi: 10.1109/TCST.2017.2724020 |
| 24 |
INCREMONA G P, FERRARA A, MAGNI L MPC for robot manipulators with integral sliding modes generation. IEEE/ASME Trans. on Mechatronics, 2017, 22 (3): 1299- 1307.
doi: 10.1109/TMECH.2017.2674701 |
| 25 |
GAO J, WU P G, LI T R, et al Optimization-based model reference adaptive control for dynamic positioning of a fully actuated underwater vehicle. Nonlinear Dynamics, 2017, 87 (4): 2611- 2623.
doi: 10.1007/s11071-016-3214-2 |
| 26 | RAWLINGS J B, MAYNE D Q, DIEHL M M. Model predictive control: theory, computation, and design. Madison: Nob Hill Publishing, LLC, 2012. |
| 27 | FARAJZADEH-D M G, HOSSEINI SANI S K, AKBARZADEH A. Performance enhancement of model reference adaptive control through normalized Lyapunov design. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2019. DOI: 10.1177/0959651818822925. |
| 28 | GILBERT E G, KOLMANOVSKY I. Discrete-time reference governors for systems with state and control constraints and disturbance inputs. Proc. of the 34th IEEE Conference on Decision and Control, 1994: 1189−1194. |
| 29 |
KOLMANOVSKY I, GILBERT E G Theory and computaion of disturbance invariant sets for discrete-time linear systems. Mathematical Problems in Engineering, 1998, 4 (4): 317- 367.
doi: 10.1155/S1024123X98000866 |
| 30 | ZACCARIAN L. DC motors: dynamic model and control techniques. http://homepages.laas.fr/lzaccari/seminars/DCmotors.pdf. |
| [1] | Bomin Huang, Lingmei Chen, and Weiyao Lan. Global robust output regulation for a class of affine singular nonlinear systems [J]. Systems Engineering and Electronics, 2017, 28(4): 745-. |
| [2] | Jiaoru Huang, Fucai Qian, Guo Xie, and Hengzhan Yang. Robust adaptive control for dynamic systems with mixed uncertainties [J]. Systems Engineering and Electronics, 2016, 27(3): 656-663. |
| [3] | Mou Chen and Bin Jiang. Robust bounded control for uncertain flight dynamics using disturbance observer [J]. Journal of Systems Engineering and Electronics, 2014, 25(4): 640-. |
| [4] | Xunhong Lv, Bin Jiang, Ruiyun Qi, and Jing Zhao. Survey on nonlinear reconfigurable flight control [J]. Journal of Systems Engineering and Electronics, 2013, 24(6): 971-983. |
| [5] | Jie Wang, Qun Zong, Bailing Tian, and Helong Liu. Flight control for a flexible air-breathing hypersonic vehicle based on quasi-continuous high-order sliding mode [J]. Journal of Systems Engineering and Electronics, 2013, 24(2): 288-295. |
| [6] | Jun Jiang, Jian Guo, Bin Yao, and Qingwei Chen. Adaptive robust control of mobile satellite communication system with disturbance and model uncertainties [J]. Journal of Systems Engineering and Electronics, 2012, 23(5): 761-767. |
| [7] | Zhaoqiang Ge. Perturbation and robust controllability of singular distributed parameter control systems in Hilbert space [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 647-653. |
| [8] | Xueyan Zhao, Feiqi Deng. Solution of the HJI equations for nonlinear H∞ control design by state-dependent Riccati equations approach [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 654-660. |
| [9] | Zhang Ren, Wei Wang, and Zhen Shen. New robust fault-tolerant controller for self-repairing flight control systems [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 77-82. |
| [10] | Jianqiao Yu, Guanchen Luo, and Wentao Yin. Missile robust gain scheduling autopilot design using full block multipliers [J]. Journal of Systems Engineering and Electronics, 2010, 21(5): 883-891. |
| [11] | Duan Guangren & Li Yanjiang. Robust passive control for discrete-time T-S fuzzy systems with delays [J]. Journal of Systems Engineering and Electronics, 2009, 20(5): 1045-1051. |
| [12] | Pang Haiping & Chen Xia. Global robust optimal sliding mode control for uncertain affine nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2009, 20(4): 838-843. |
| [13] | Ma Gaoyin, Chen Wenyuan, Cui Feng, Zhang Weiping & Wang Liqi. Soft initial-rotation and H∞ robust constant rotational speed control for rotational MEMS gyro [J]. Journal of Systems Engineering and Electronics, 2009, 20(3): 583-589. |
| [14] | Shi Yingjing, Ma Guangfu & Ma Hongzhong. Robust stability analysis for a cruise missile [J]. Journal of Systems Engineering and Electronics, 2008, 19(4): 785-790. |
| [15] | Xu Jiansheng, Wu Hao & Wang Yongji. Unpower aerocraft augmented state feedback tracking guaranteed cost control [J]. Journal of Systems Engineering and Electronics, 2008, 19(1): 125-130. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||