
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (2): 498-516.doi: 10.23919/JSEE.2021.000042
• CONTROL THEORY AND APPLICATION • Previous Articles
Zhifei XI*( ), An XU, Yingxin KOU, Zhanwu LI, Aiwu YANG
), An XU, Yingxin KOU, Zhanwu LI, Aiwu YANG
Received:2020-03-18
Online:2021-04-29
Published:2021-04-29
Contact:
Zhifei XI
E-mail:18149365256@163.com
About author:Zhifei XI, An XU, Yingxin KOU, Zhanwu LI, Aiwu YANG. Target maneuver trajectory prediction based on RBF neural network optimized by hybrid algorithm[J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 498-516.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig.1
Flow chart of determining chaotic mutation timing"
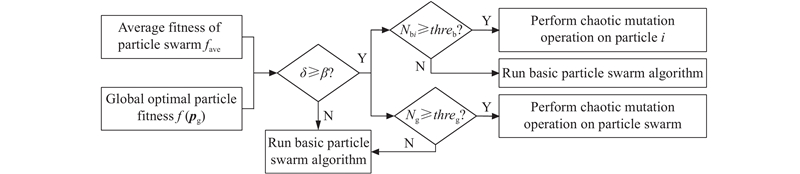

Fig.2
Flow chart of determining chaotic mutation timing"
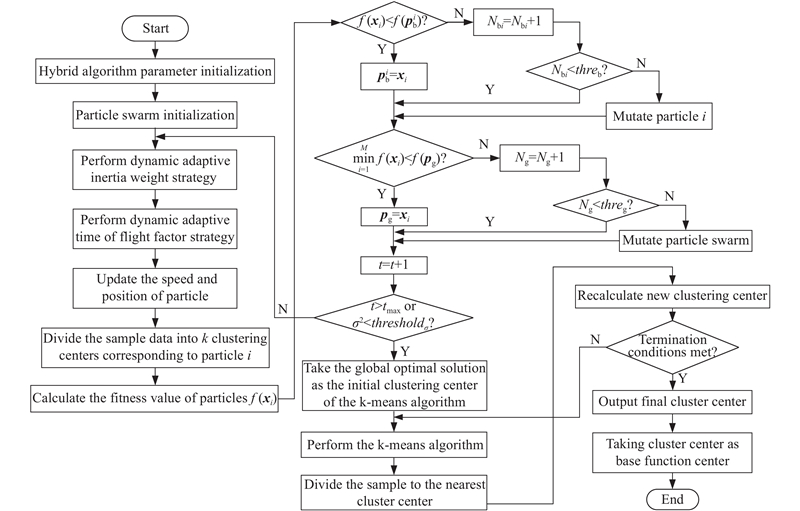
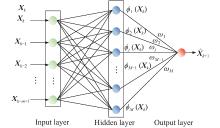
Fig.3
Structure of RBF prediction model"
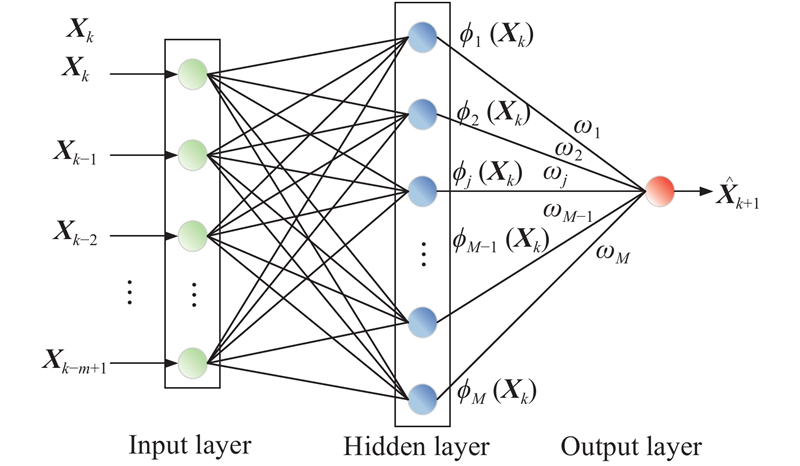
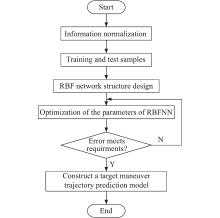
Fig.4
Flow chart for the design of RBFNN"
Fig.5
Flowchart of the PSR-RBF prediction model"
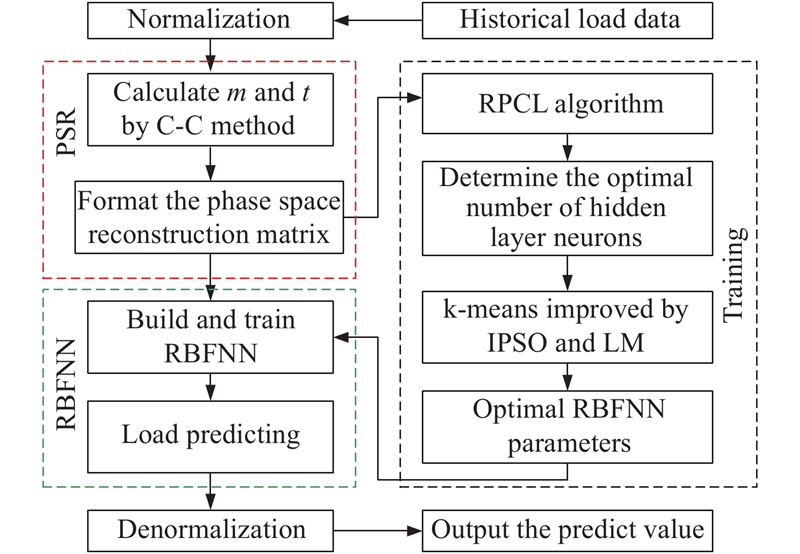
Fig.6
A complete air combat trajectory"

Fig.7
Sample data"

Fig.8
Differences of independent method and overall method"
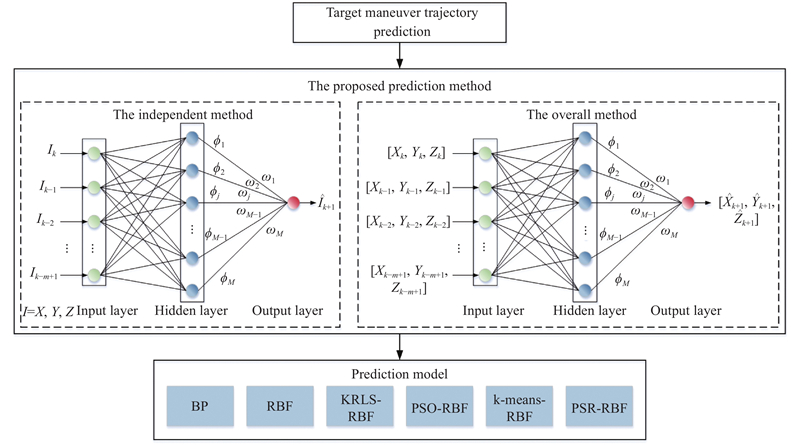
Table 1
Parameter settings for each algorithm"
| Algorithm | Parameter |
| PSO | |
| IPSO | |
Fig.9
Comparison of prediction results of RBF model (Experiment I)"
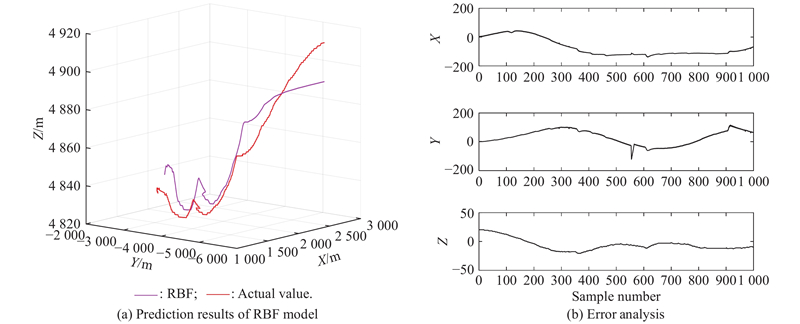

Fig.10
Comparison of prediction results of PSR-RBF model (Experiment I)"
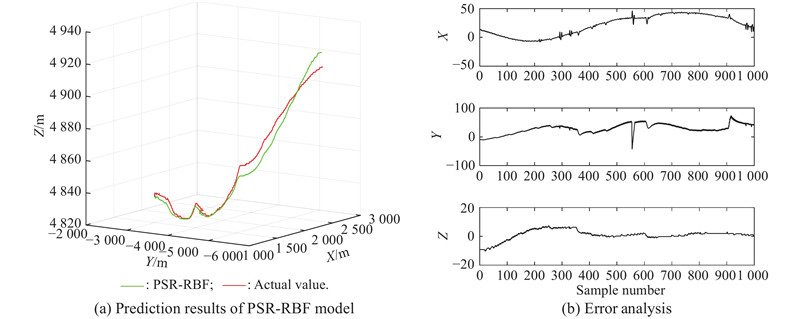
Fig.11
Comparison of prediction results of PSO-RBF model (Experiment I)"
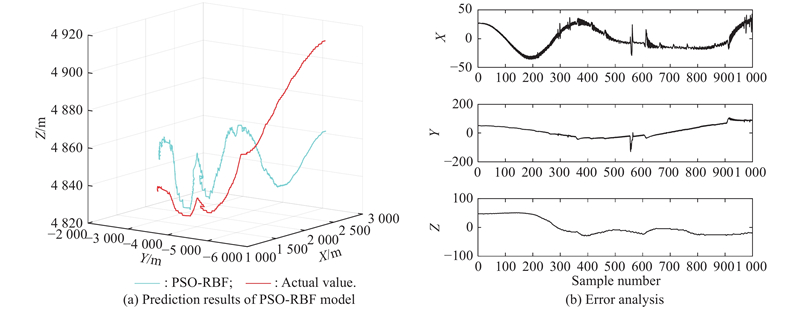
Fig.12
Comparison of prediction results of KRLS-RBF model (Experiment I)"
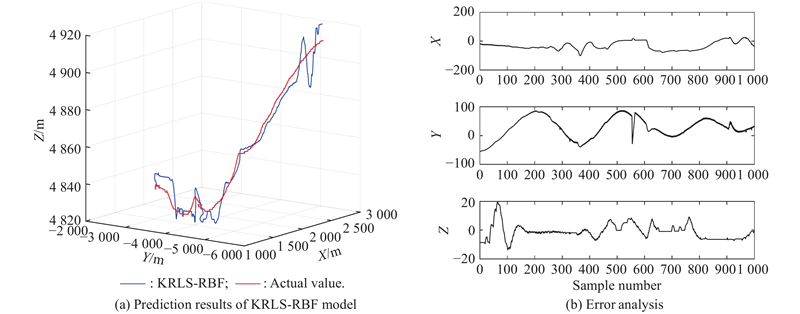
Fig.13
Comparison of prediction results of k-means-RBF model (Experiment I)"
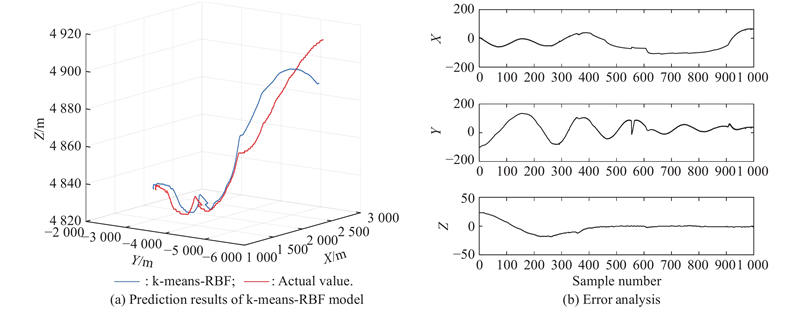
Fig.14
Comparison of prediction results of BP model (Experiment I)"
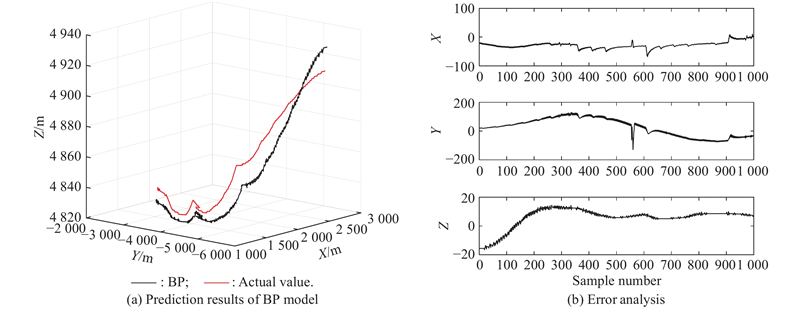
Table 2
Comparison of prediction performance of six models with independent method"
| Coordinate | Algorithm | MAE | NMSE | Perr | Cor | Time |
| X | Hybrid algorithm | 16.0787 | 0.0020 | 9.8677×10?5 | 0.9987 | 14.350948 |
| k-means-RBF | 54.2051 | 0.0237 | 0.0011 | 0.9923 | 2.393672 | |
| KRLS-RBF | 36.6747 | 0.0110 | 5.2293×10?4 | 0.9967 | 8.118918 | |
| PSO-RBF | 22.5727 | 0.0044 | 2.1902×10?4 | 0.9980 | 2.157142 | |
| BP | 28.2177 | 0.0053 | 2.5598×10?4 | 0.9987 | 4.232382 | |
| RBF | 84.2022 | 0.0519 | 0.0024 | 0.9972 | 5.316289 | |
| Y | Hybrid algorithm | 29.5963 | 0.0017 | 5.9124×10?5 | 0.9988 | 7.500620 |
| k-means-RBF | 50.3425 | 0.0059 | 2.0235×10?4 | 0.9967 | 1.9489286 | |
| KRLS-RBF | 38.0530 | 0.0033 | 1.1197×10?4 | 0.9980 | 9.833438 | |
| PSO-RBF | 35.6712 | 0.0029 | 1.0072×10?4 | 0.9979 | 2.279306 | |
| BP | 59.2305 | 0.0071 | 2.4251×10?4 | 0.9979 | 4.901085 | |
| RBF | 49.7448 | 0.0053 | 1.8278×10?4 | 0.9971 | 5.310010 | |
| Z | Hybrid algorithm | 2.6647 | 0.0169 | 5.6031×10?7 | 0.9926 | 7.971086 |
| k-means-RBF | 5.4294 | 0.0977 | 3.2308×10?6 | 0.9517 | 2.292306 | |
| KRLS-RBF | 3.9263 | 0.0344 | 1.1381×10?6 | 0.9830 | 8.561687 | |
| PSO-RBF | 23.8547 | 1.0174 | 3.3684×10?5 | 0.1953 | 2.328323 | |
| BP | 8.4035 | 0.1028 | 3.4118×10?6 | 0.9849 | 4.102884 | |
| RBF | 10.2155 | 0.1689 | 5.5776×10?6 | 0.9439 | 9.192351 |
Fig.15
Comparison of prediction results of RBF model (Experiment II)"
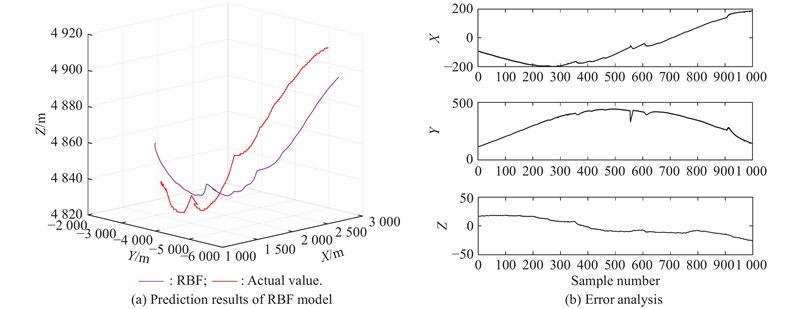

Fig.16
Comparison of prediction results of PSR-RBF model (Experiment II)"
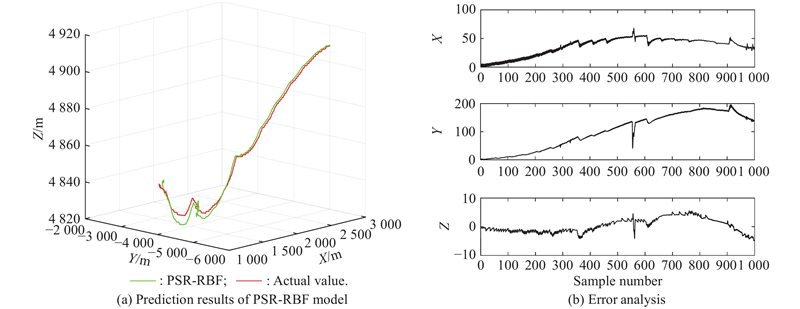
Fig.17
Comparison of prediction results of PSO-RBF model (Experiment II)"
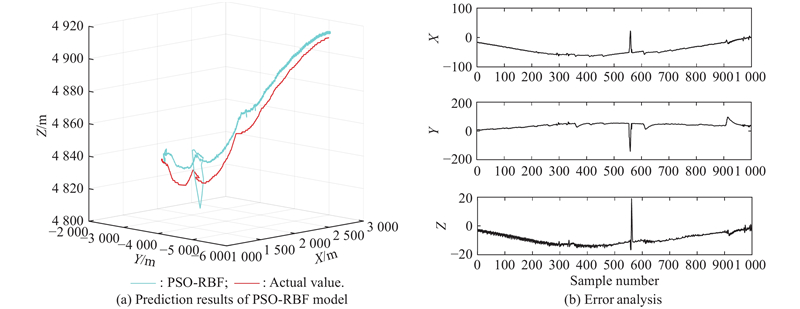
Fig.18
Comparison of prediction results of KRLS-RBF model (Experiment II)"
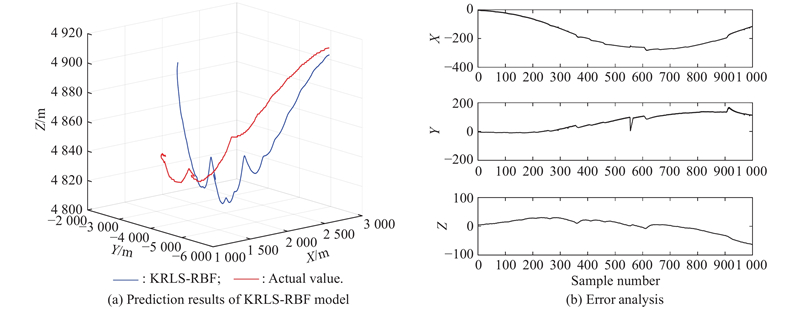
Fig.19
Comparison of prediction results of k-means-RBF model (Experiment II)"
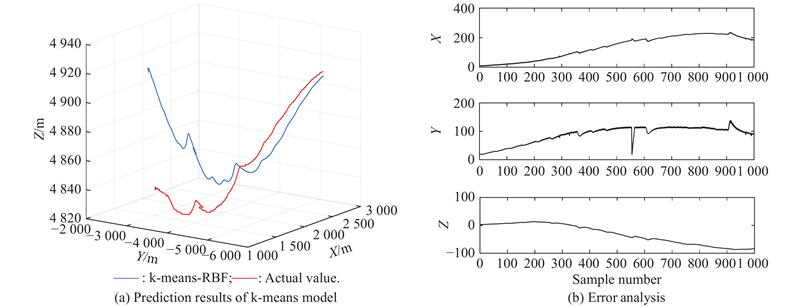
Fig.20
Comparison of prediction results of BP model (Experiment II)"
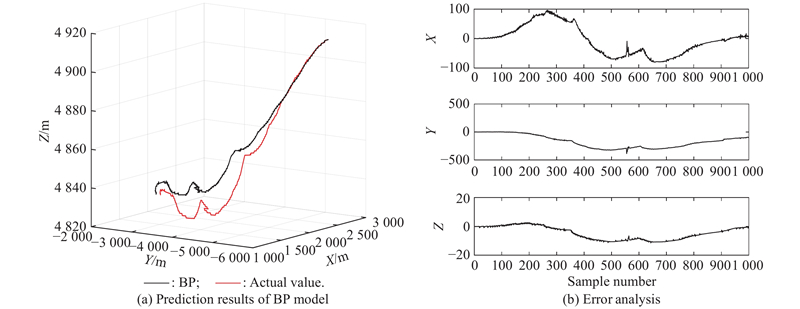

Fig.21
Comparison chart of trajectory by independent methods"
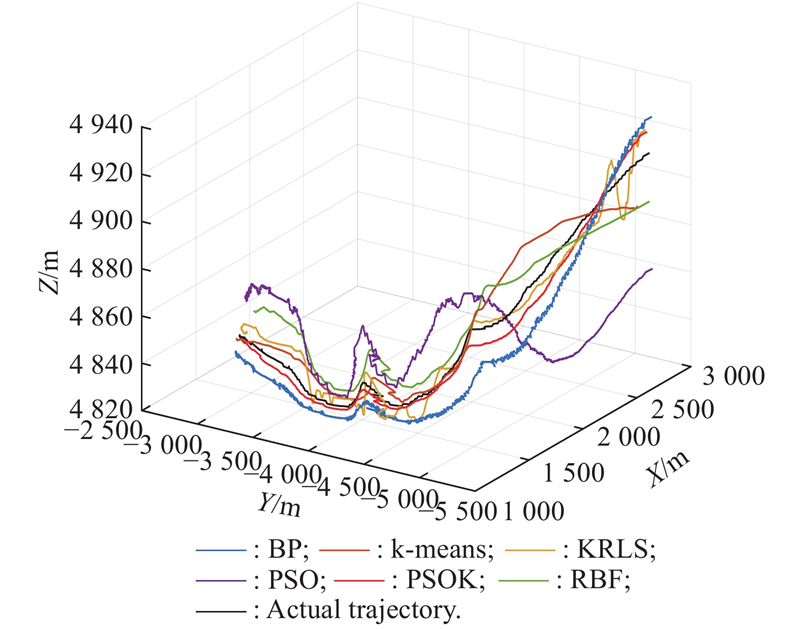

Fig.22
Comparison chart of trajectory by overall methods"
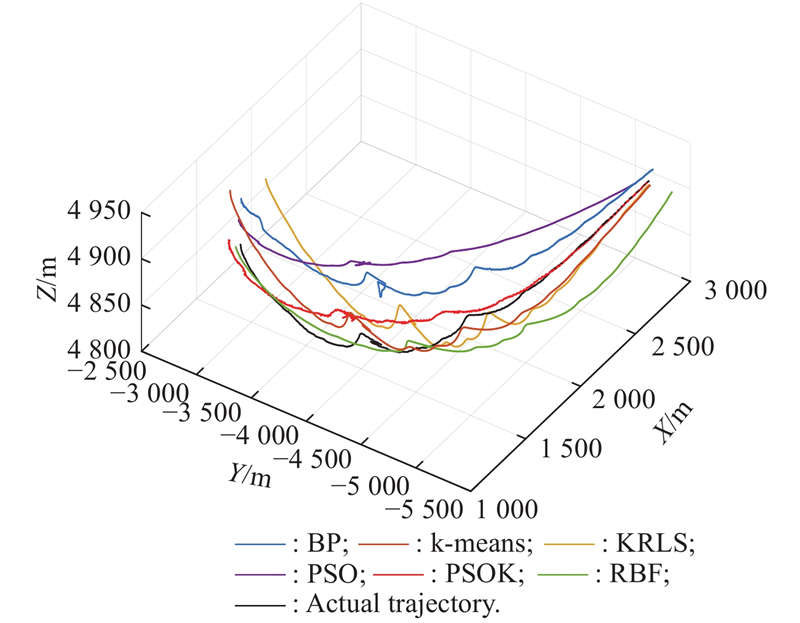
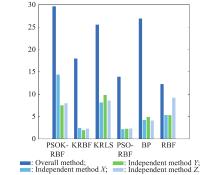
Fig.23
Comparison of the complexity of six algorithms based on the theory of two methods"
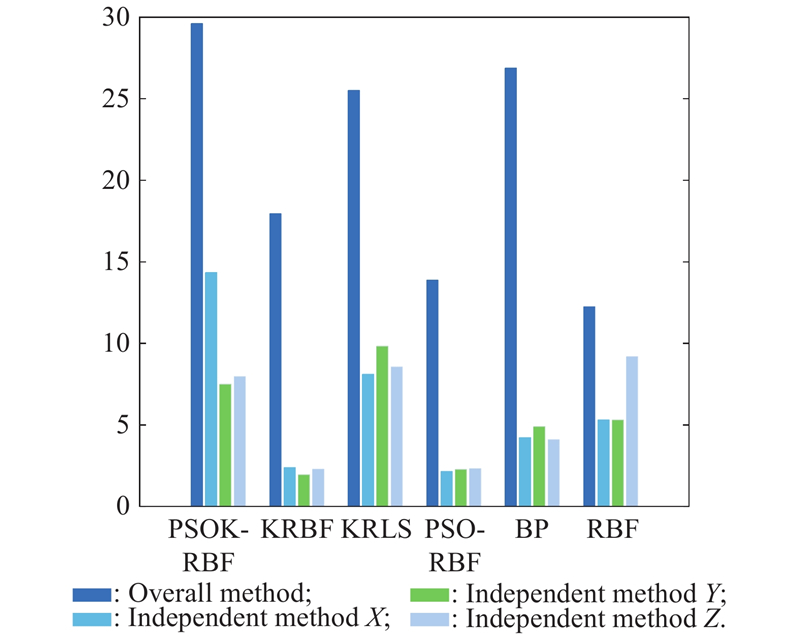
Table 3
Comparison of prediction performance of six models with overall method"
| Coordinate | Algorithm | MAE | NMSE | Perr | Cor | Time |
| X | Hybrid algorithm | 40.2672 | 0.0144 | 7.1105×10?4 | 0.9933 | 29.616218 |
| k-means-RBF | 136.1964 | 0.1450 | 0.0081 | 0.9968 | 17.959766 | |
| KRLS-RBF | 170.9212 | 0.2210 | 0.0093 | 0.9957 | 25.521019 | |
| PSO-RBF | 23.0470 | 0.0041 | 2.0694×10?4 | 0.9988 | 13.886920 | |
| BP | 106.2750 | 0.0797 | 0.0035 | 0.9923 | 26.891305 | |
| RBF | 123.7173 | 0.1101 | 0.0050 | 0.9743 | 12.254671 | |
| Y | Hybrid algorithm | 47.1890 | 0.0041 | 1.4496×10?4 | 0.9988 | 29.616218 |
| k-means-RBF | 89.4069 | 0.0139 | 4.6373×10?4 | 0.9987 | 17.959766 | |
| KRLS-RBF | 69.8827 | 0.0120 | 4.0600×10?4 | 0.9987 | 25.521019 | |
| PSO-RBF | 79.8018 | 0.0141 | 5.0993×10?4 | 0.9989 | 13.886920 | |
| BP | 170.0623 | 0.0651 | 0.0024 | 0.9920 | 26.891305 | |
| RBF | 330.4476 | 0.1861 | 0.0056 | 0.9918 | 12.254671 | |
| Z | Hybrid algorithm | 12.1015 | 0.2226 | 7.3642×10?6 | 0.9515 | 29.616218 |
| k-means-RBF | 36.8691 | 2.8773 | 9.4013×10?5 | 0.0574 | 17.959766 | |
| KRLS-RBF | 18.6878 | 0.7032 | 2.3306×10?5 | 0.6510 | 25.521019 | |
| PSO-RBF | 58.3648 | 5.3875 | 1.7416×10?4 | 0.1688 | 13.886920 | |
| BP | 5.1186 | 0.0529 | 1.7464×10?6 | 0.9933 | 26.891305 | |
| RBF | 36.7159 | 2.1721 | 7.082×10?5 | 0.8511 | 12.254671 |
| 1 | MA G B, XUE A K Application of data mining technology in predicting the track of moving object. Computer Engineering and Applications, 2004, 40 (11): 210- 212. |
| 2 | YOU H H, YU M J, LV Y, et al Application of UKF optimized by improved gray wolf algorithm in air combat trajectory prediction. Tactical Missile Technology, 2020, (1): 91- 98. |
| 3 | KIM B M, CHOI K C, KIM B S. Trajectory tracking controller design using neural networks for Tiltrotor UAV. Proc. of the AIAA Guidance, Navigation and Control Conference and Exhibit, 2007: 1–17. |
| 4 | WANG C, GUO J X, SHEN Z P Prediction of 4D trajectory based on basic flight models. Journal of Southwest Jiaotong University, 2009, 44 (2): 295- 300. |
| 5 | ZHANG M J, SHAO P N, YU M H Pattern-based moving target trajectory prediction in hyperspace. Computer System & Applications, 2018, 27 (1): 113- 119. |
| 6 | QIAO S J, HAN N, ZHU X W, et al A dynamic trajectory prediction algorithm based on Kalman filter. Acta Electronica Sinica, 2018, 46 (2): 418- 423. |
| 7 | IOANNIS L, JOHN L. Adaptive aircraft trajectory prediction using particle filters. Proc. of the AIAA Guidance, Navigation and Control Conference and Exhibit, 2008. DOI: 10.2514/6.2008-7387. |
| 8 | XIE L, ZHANG J F, SUI D Aircraft trajectory prediction based on interacting multiple model filtering algorithm. Aeronautical Computing Technique, 2012, 42 (5): 68- 71. |
| 9 | YAN H W, ZOU D Short-term wind speed forecasting based on PSO-Elman optimized by association rule. Computer Engineering and Applications, 2017, 53 (23): 261- 266. |
| 10 | QIAN K, ZHOU Y, YANG L J, et al Aircraft target track prediction model based on BP neural network. Command Information System and Technology, 2017, 8 (3): 54- 58. |
| 11 | TAN W, LU B C, HUANG M L Track prediction based on neural networks and genetic algorithm. Journal of Chongqing Jiaotong University, 2010, 29 (1): 147- 150. |
| 12 | GAN X S, DUANMU J S, MENG Y B, et al Aerodynamic modeling from flight data based on WNN optimized by particle swarm. Acta Aeronautica et Astronautica Sinica, 2012, 33 (7): 1209- 1217. |
| 13 | YANG R N, ZHANG Z X, ZHANG Y, et al Prediction of aircraft flight performance model based on NARX neural network. Journal of Northwest University, 2017, 47 (1): 7- 12. |
| 14 |
FAN G F, PENG L L, HONG W C Short term load forecasting based on phase space reconstruction algorithm and bi-square kernel regression model. Applied Energy, 2018, 224, 13- 33.
doi: 10.1016/j.apenergy.2018.04.075 |
| 15 |
WANG H Z, WANG G B, LI G Q, et al Deep belief network based deterministic and probabilistic wind speed forecasting approach. Applied Energy, 2016, 182, 80- 93.
doi: 10.1016/j.apenergy.2016.08.108 |
| 16 | KIM H S, EYKHOLT R, SALAS J D Nonlinear dynamics, delay times, and embedding windows. Physica D: Nonlinear Phenomena, 1999, 127 (1/2): 48- 60. |
| 17 |
KIM H S, KANG D S, KIM J H The BDS statistic and residual test. Stochastic Environmental Research & Risk Assessment, 2003, 17 (1/2): 104- 115.
doi: 10.1007/s00477-002-0118-0 |
| 18 | YAN Z, JIAN Y, CAI Y J. Initializing k-means clustering using affinity propagation. Proc. of the International Conference on Hybrid Intelligent Systems, 2009, 1: 338–343. |
| 19 |
HUA X, HU X, YUAN W W Research optimization on logistics distribution center location based on adaptive particle swarm algorithm. Optik, 2016, 127 (20): 8443- 8450.
doi: 10.1016/j.ijleo.2016.06.032 |
| 20 | GAO W F, LIU S Y, HUANG L L Particle swarm optimization with chaotic opposition-based population initialization and stochastic search technique. Communications in Nonlinear Science & Numerical Simulation, 2012, 17 (11): 4316- 4327. |
| 21 | TURGUT O E, TURGUT M S, COBAN M T Chaotic quantum behaved particle swarm optimization algorithm for solving nonlinear system of equations. Computers & Mathematics with Applications, 2014, 68 (4): 508- 530. |
| 22 |
LI P, XU D, ZHOU Z Y, et al Stochastic optimal operation of microgrid based on chaotic binary particle swarm optimization. IEEE Trans. on Smart Grid, 2016, 7 (1): 66- 73.
doi: 10.1109/TSG.2015.2431072 |
| 23 |
CUANG L Y, YANG C S, WU K C, et al Gene selection and classification using Taguchi chaotic binary particle swarm optimization. Expert Systems with Application, 2011, 38 (10): 13367- 13377.
doi: 10.1016/j.eswa.2011.04.165 |
| 24 | HUANG G B, SIEW C K Extreme learning machine with randomly assigned RBF kernels. International Journal of Information Technology, 2005, 11 (1): 16- 24. |
| 25 |
XU L, KRZYZAK A, OJA E Rival penalized competitive learning for clustering analysis, RBF net, and curve detection. IEEE Trans. on Neural Networks, 1993, 4 (4): 636- 649.
doi: 10.1109/72.238318 |
| 26 | SUN Y X, XIA H W Rival penalized competitive learning-based neural network model for wind power forecasting. Journal of Beijing University of Technology, 2016, 42 (5): 674- 678. |
| 27 | WANG J S, GAO Z W Network traffic modeling and prediction based on RBF neural network. Computer Engineering and Applications, 2008, 44 (13): 6- 11. |
| 28 | NOMAN S, SHAMSUDDIN S M, HASSANIEN A E. Hybrid learning enhancement of RBF network with particle swarm optimization. Foundations of Computational Intelligence, Volume 1: Learning and Approximation, 2009, 201: 381–397. |
| 29 | HU Y M, LI D C, HE Y Q, et al Q-learning algorithm based on incremental RBF network. Robot, 2019, 41 (5): 562- 573. |
| 30 |
WOLPERT D H, MACREADY W G No free lunch theorems for optimization. IEEE Trans. on Evolutionary Computation, 1997, 1 (1): 67- 82.
doi: 10.1109/4235.585893 |
| [1] | Fan WANG, Pengfei FAN, Yonghua FAN, Bin XU, Jie YAN. Robust adaptive control of hypersonic vehicle considering inlet unstart [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 188-196. |
| [2] | Fan LI, Jiajun XIONG, Xuhui LAN, Hongkui BI, Xin CHEN. NSHV trajectory prediction algorithm based on aerodynamic acceleration EMD decomposition [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 103-117. |
| [3] | Mengfan XUE, NLei HA, Dongliang PENG. A combined algorithm of K-means and MTRL for multi-class classification [J]. Journal of Systems Engineering and Electronics, 2019, 30(5): 875-885. |
| [4] | Yang LI, Mingyong LIU, Xiaojian ZHANG, Xingguang PENG. Global approximation based adaptive RBF neural network control for supercavitating vehicles [J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 797-804. |
| [5] | Jing Yang and Jun Wang. Tag clustering algorithm LMMSK: improved K-means algorithm based on latent semantic analysis [J]. Systems Engineering and Electronics, 2017, 28(2): 374-384. |
| [6] | Ling Wang?, Dongmei Fu, Qing Li, and Zhichun Mu. Modelling method with missing values based on clustering and support vector regression [J]. Journal of Systems Engineering and Electronics, 2010, 21(1): 142-147. |
| [7] | Yi Qingming. Blind source separation by weighted K-means clustering [J]. Journal of Systems Engineering and Electronics, 2008, 19(5): 882-887. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||