
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (3): 690-699.doi: 10.23919/JSEE.2021.000059
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Fuhui GUO( ), Pingli LU*()
), Pingli LU*()
Received:2021-02-09
Online:2021-06-18
Published:2021-07-26
Contact:
Pingli LU
E-mail:gfh117inbj@163.com;pinglilu@bit.edu.cn
About author:Supported by:Fuhui GUO, Pingli LU. Fast self-adapting high-order sliding mode control for a class of uncertain nonlinear systems[J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 690-699.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
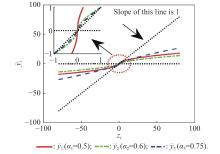
Fig 1
Graphical presentation of ${{\overset{\smile} {{y}}}_{{i}}}$ "
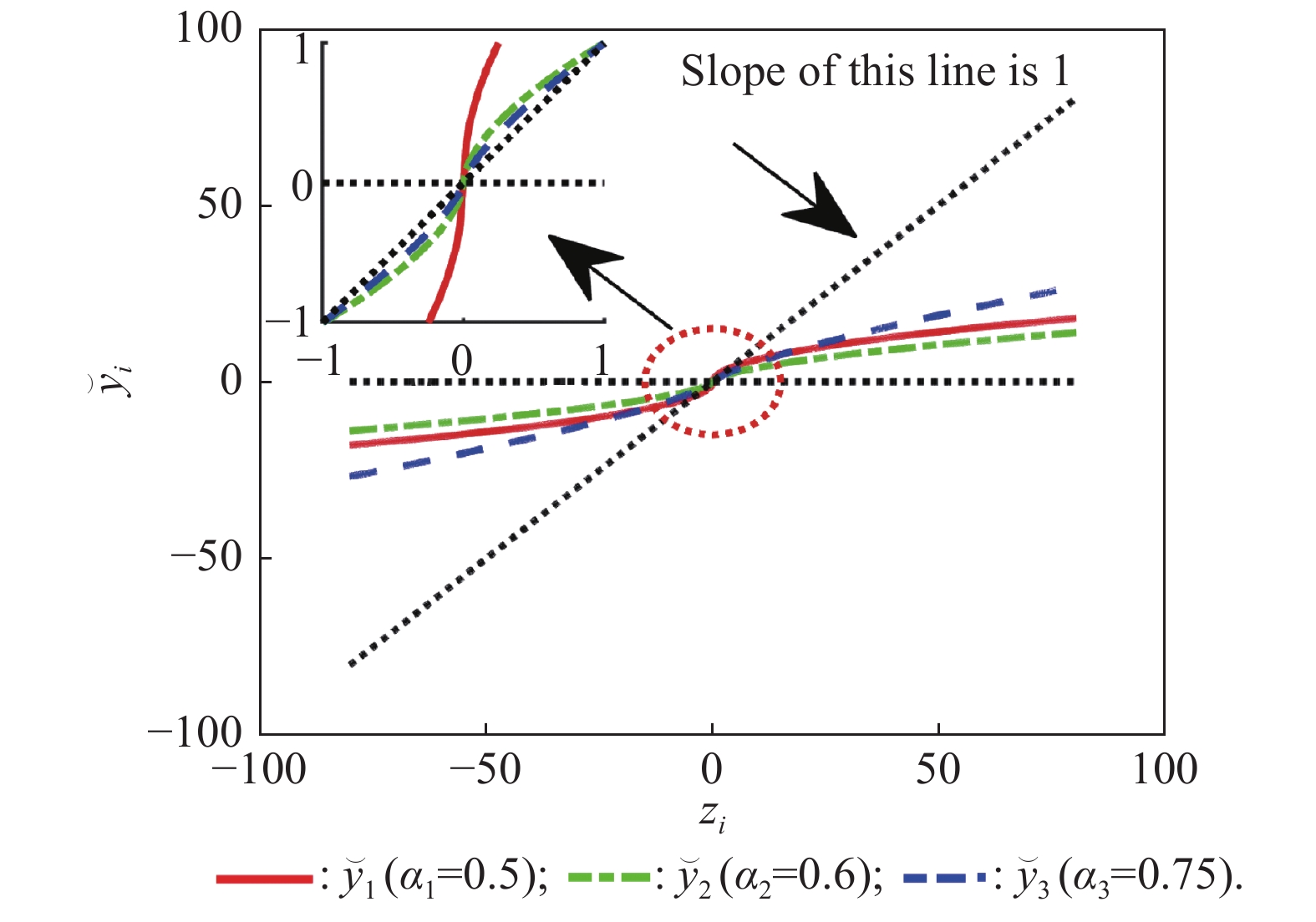
Fig 2
Zoom graphical presentation of ${{\overset{\smile} {{y}}}_{{i}}}$ "
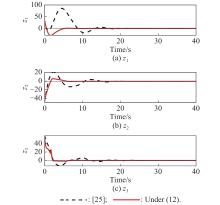
Fig 3
Comparison results of states ${{{z}}_{{1}}},{{{z}}_{{2}}},{{{z}}_{{3}}}$ in system (28) between controller ${{{v}}_{{{n1}}}}$ and the controller in [25] "
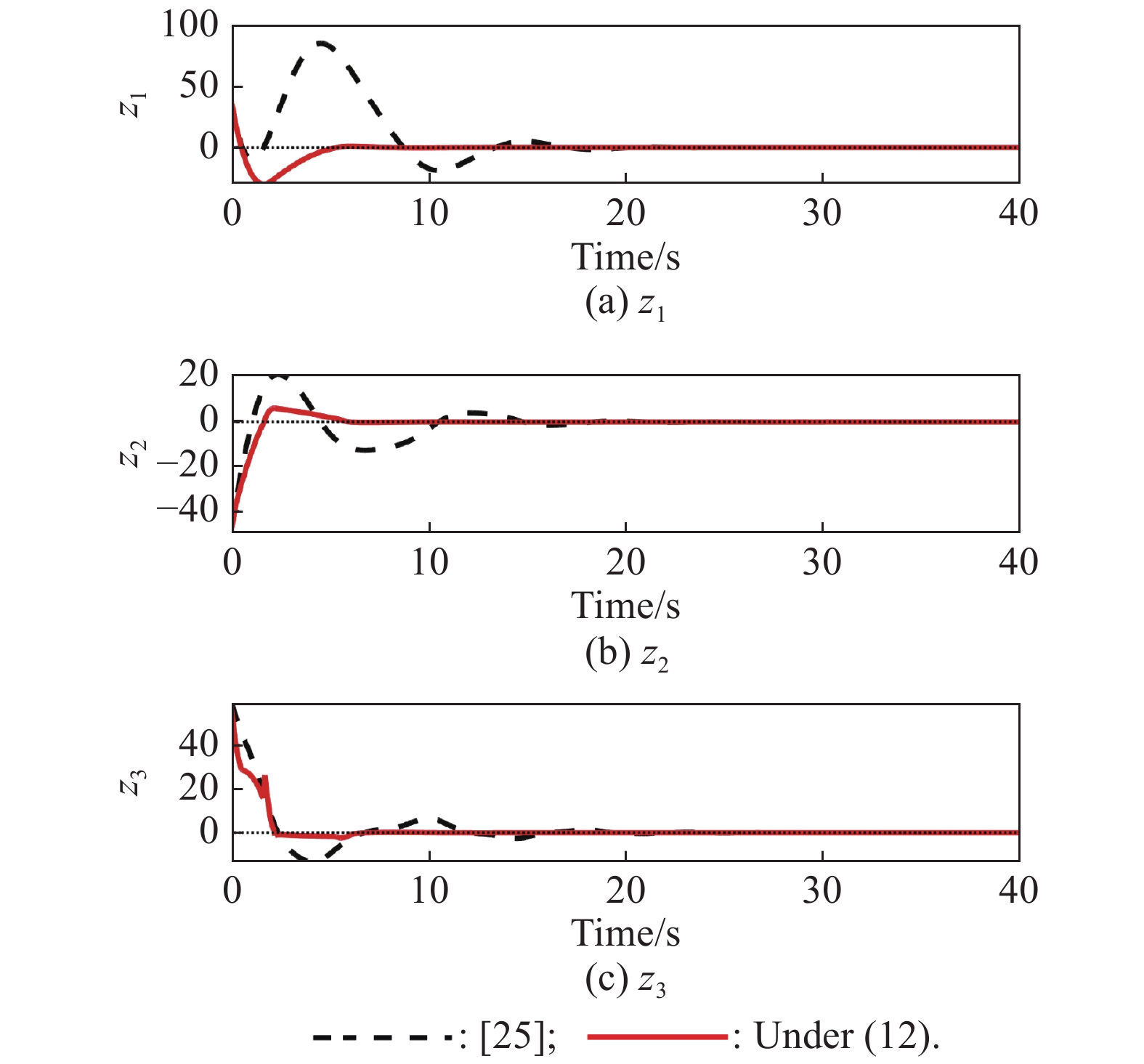
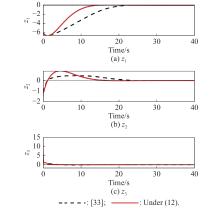
Fig 4
Comparison results of states ${{{z}}_{{1}}},{{{z}}_{{2}}},{{{z}}_{{3}}}$ in system (28) between controller ${{{v}}_{{{n1}}}}$ and the controller in [33] "
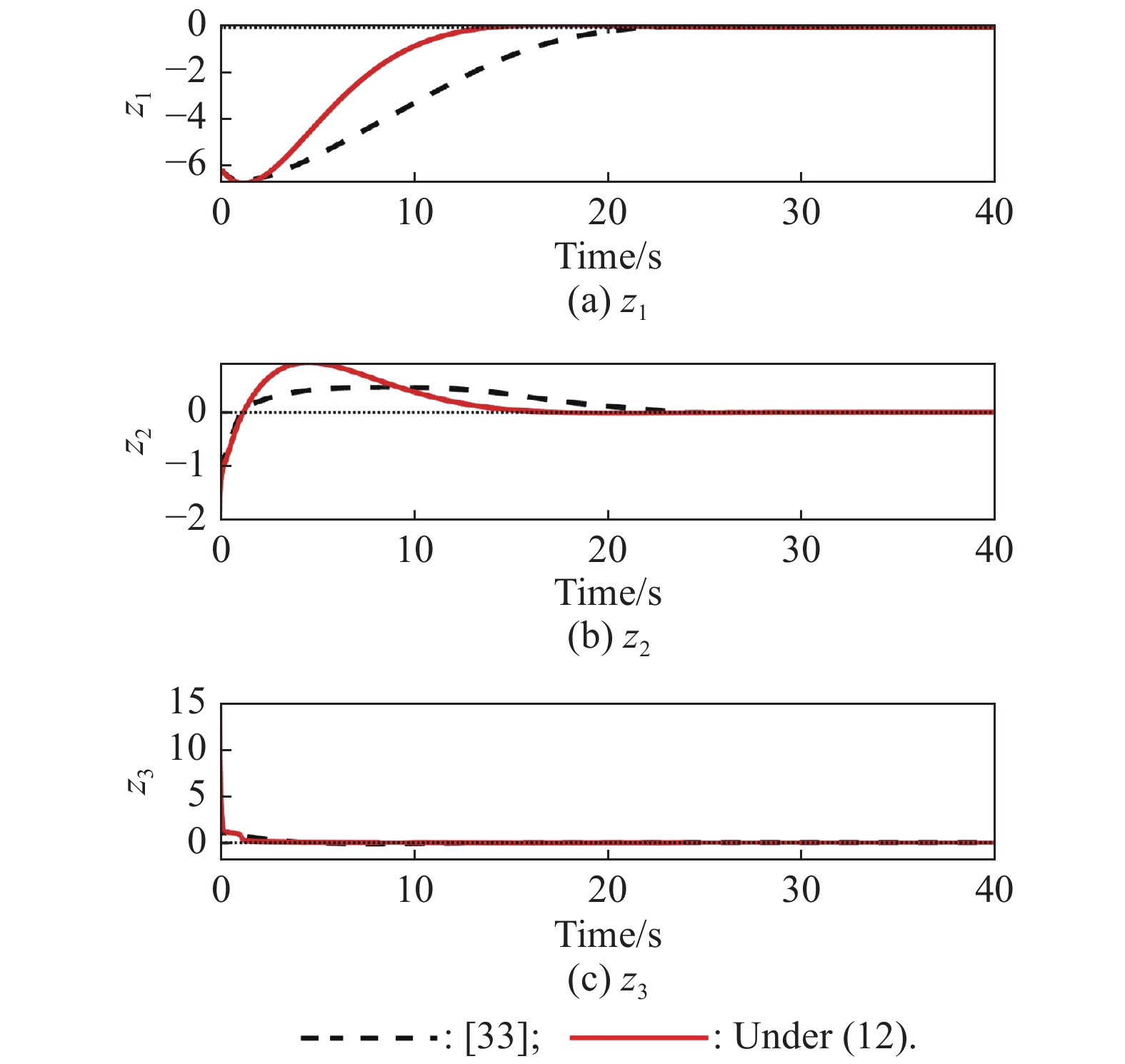
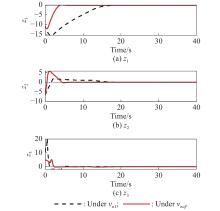
Fig 5
Comparison results of states ${{{z}}_{{1}}},{{{z}}_{{2}}},{{{z}}_{{3}}}$ in system (28) under ${{{v}}_{{{n1}}}}$ and ${{{v}}_{{{naf}}}}$ "
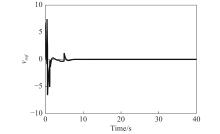
Fig 6
Control input ${{{v}}_{{{naf}}}}$ "
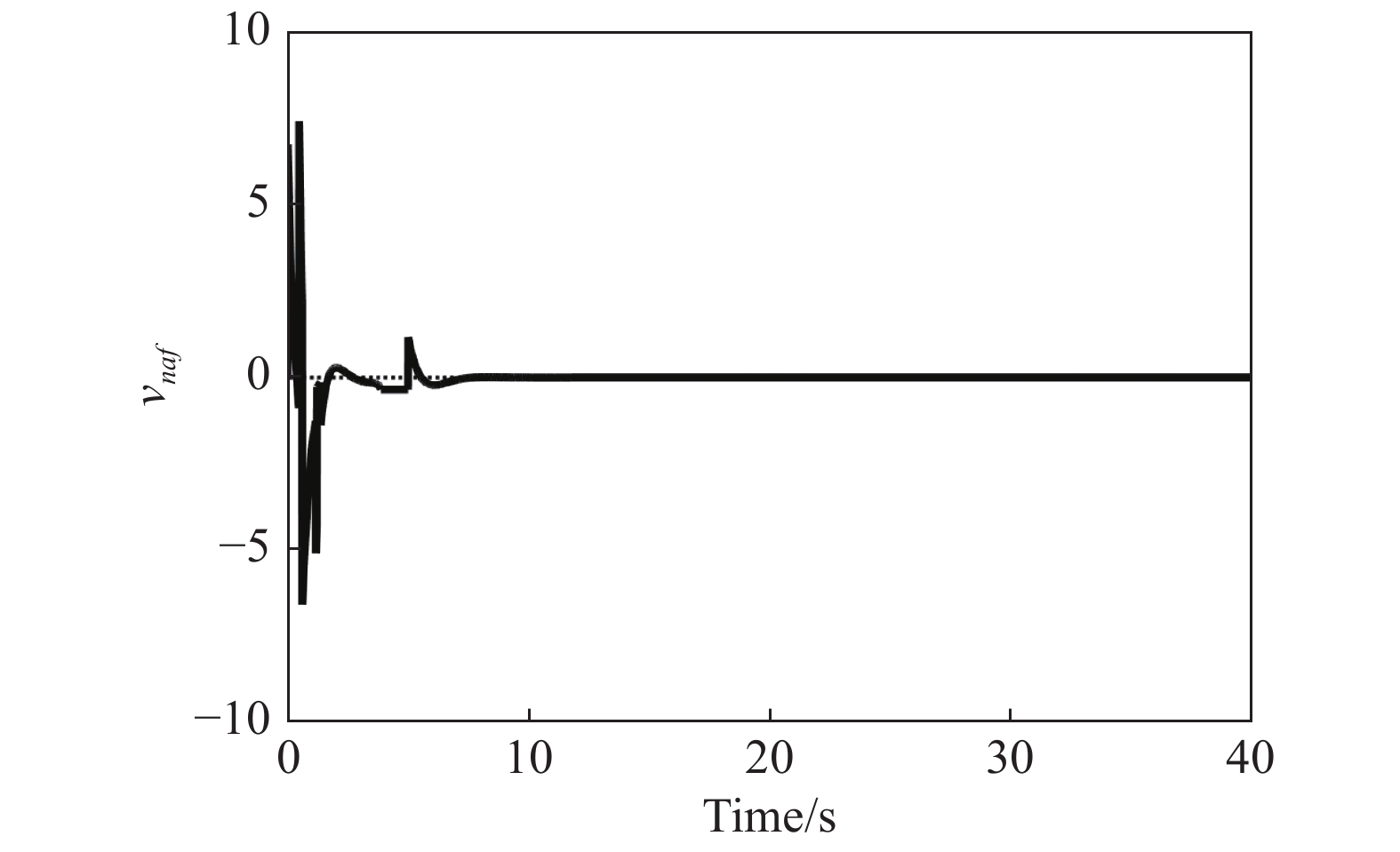
Fig 7
Adaptive gain ${{\overset{\smile} {{k}}}_{{1}}}({{t}}),{{\overset{\smile} {{k}}}_{{2}}}({{t}}),{{\overset{\smile} {{k}}}_{{3}}}({{t}})$ "
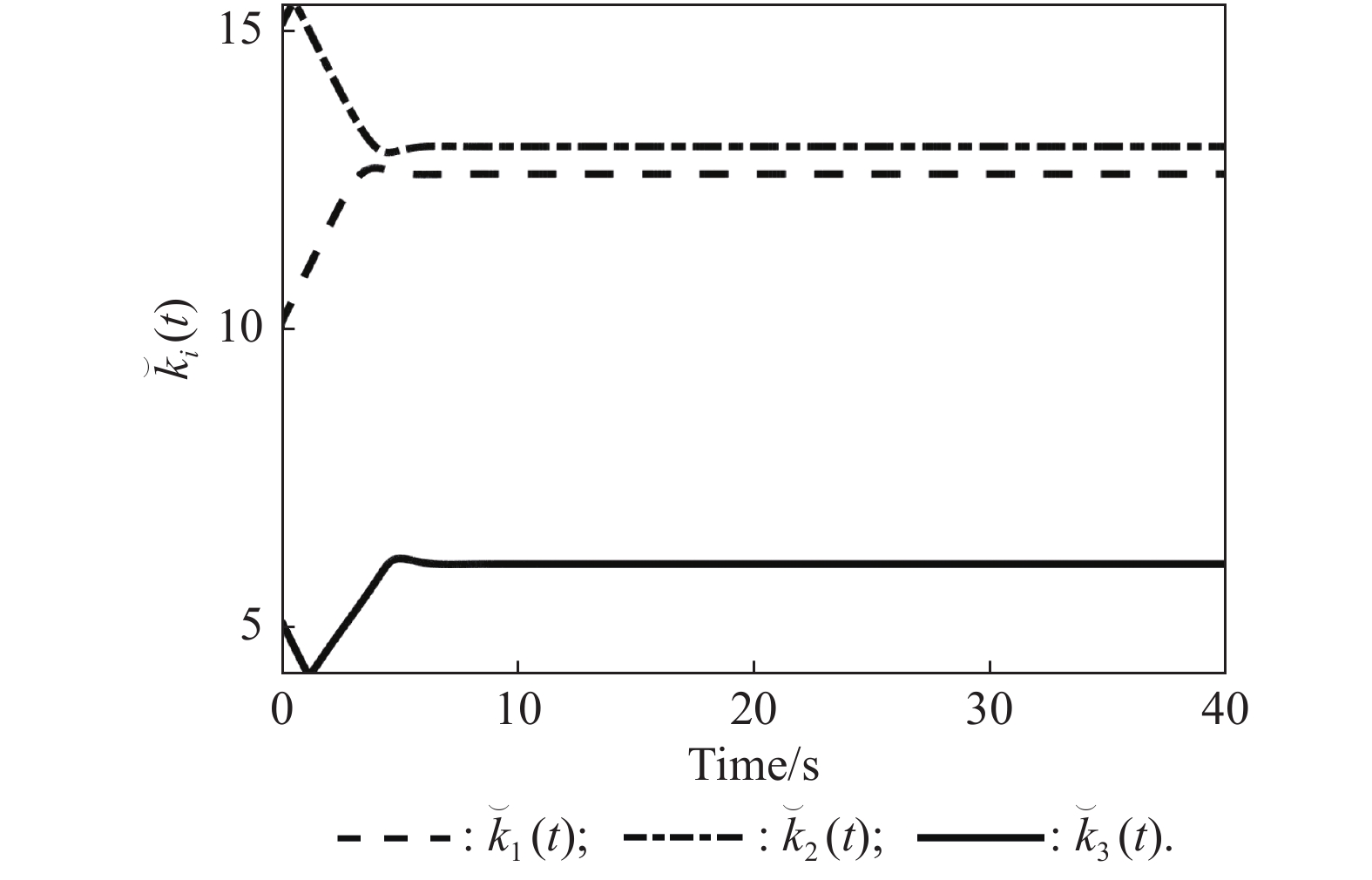
Fig 8
States ${{{z}}_{{1}}},{{{z}}_{{2}}},{{{z}}_{{3}}}$ of the system (28) under controller ${{{v}}_{{{naf}}}}$ with uncertainties "
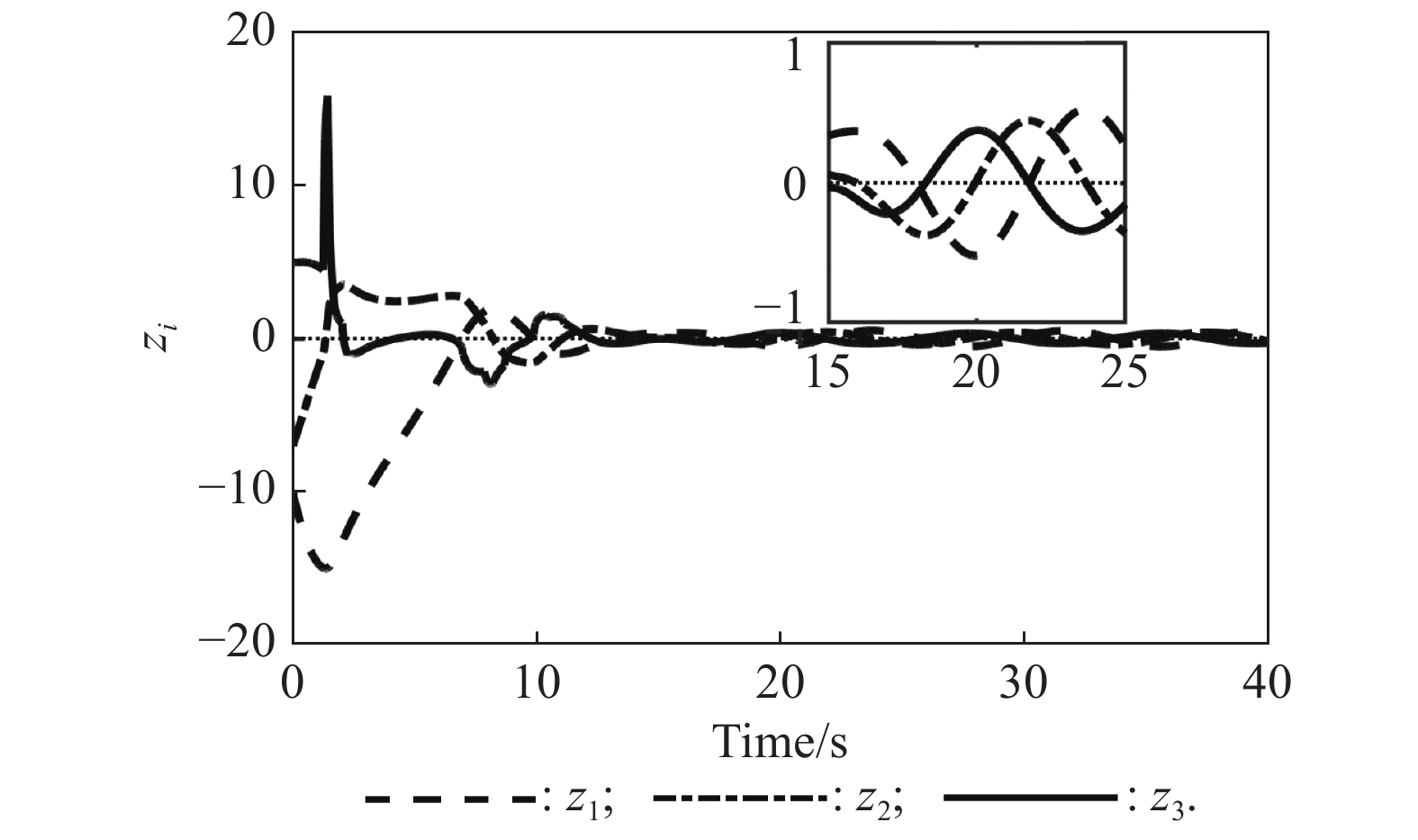
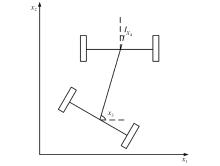
Fig 9
Kinematic car model"
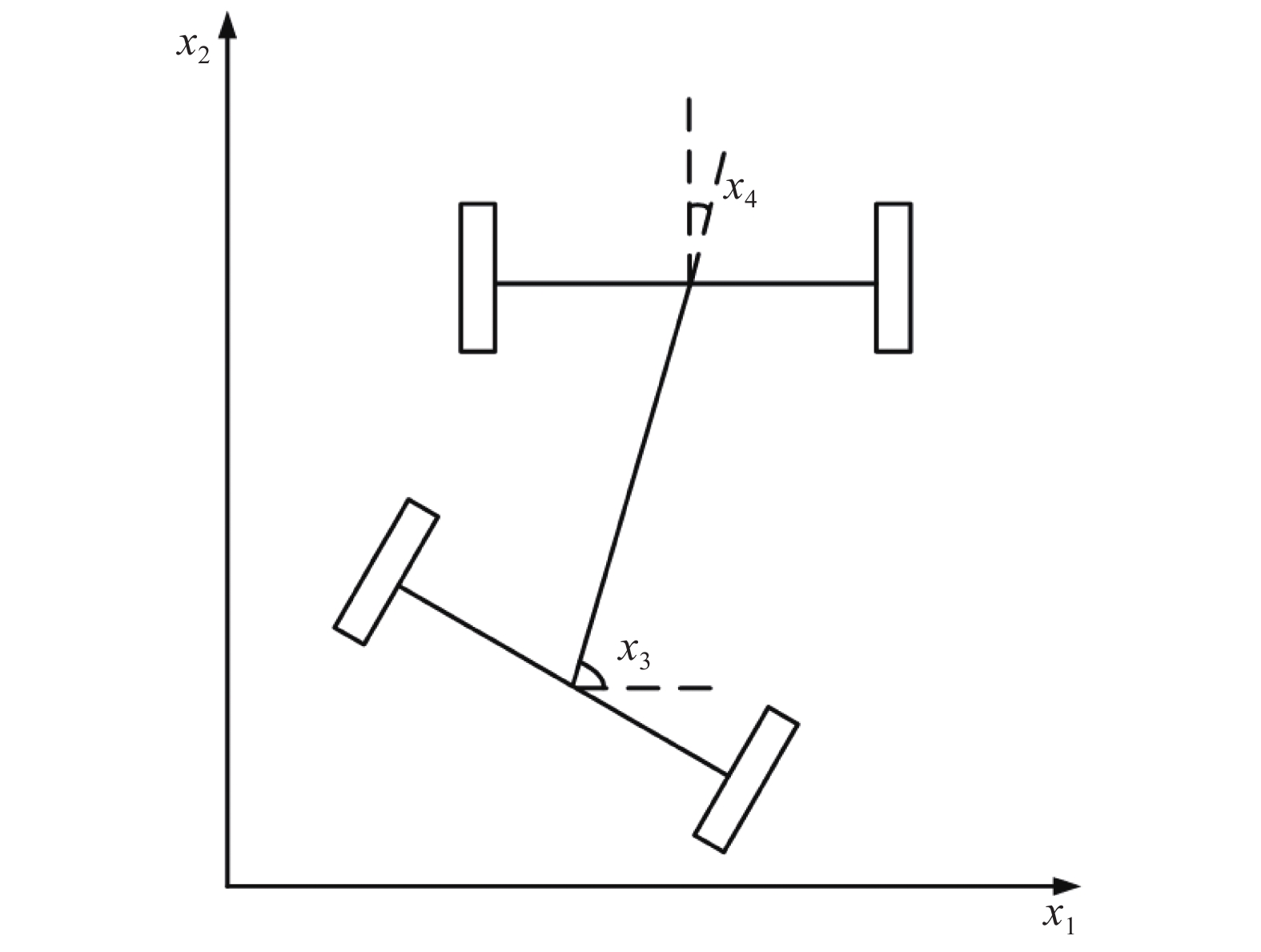
Fig 10
Trajectories of ${{{x}}_{{2}}}$ and ${{{x}}_{{{2c}}}}$ under controller (35) "
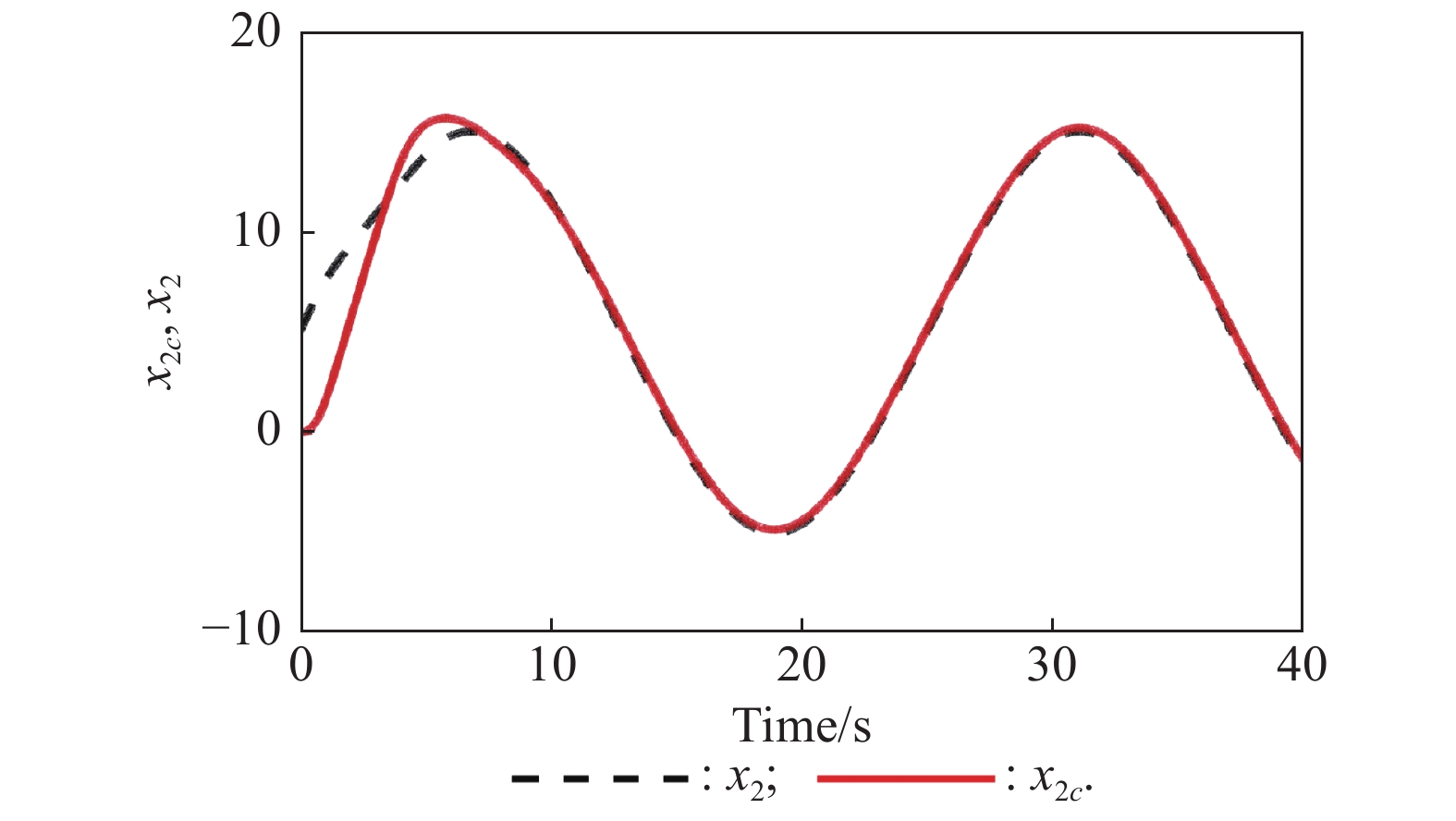
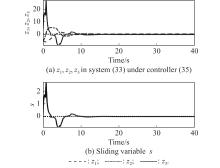
Fig 11
States ${{{z}}_{{1}}},{{{z}}_{{2}}},{{{z}}_{{3}}}$ in system (33) under controller (35) and sliding variable ${{s}}$ "
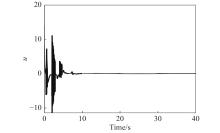
Fig 12
Control input ${{u}}$ (35) "
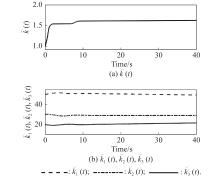
Fig 13
Adaptive gain $\tilde {{k}}({{t}})$ and ${{\overset{\smile} {{k}}}_{{1}}}({{t}}),{{\overset{\smile} {{k}}}_{{2}}}({{t}}),{{\overset{\smile} {{k}}}_{{3}}}({{t}})$ "
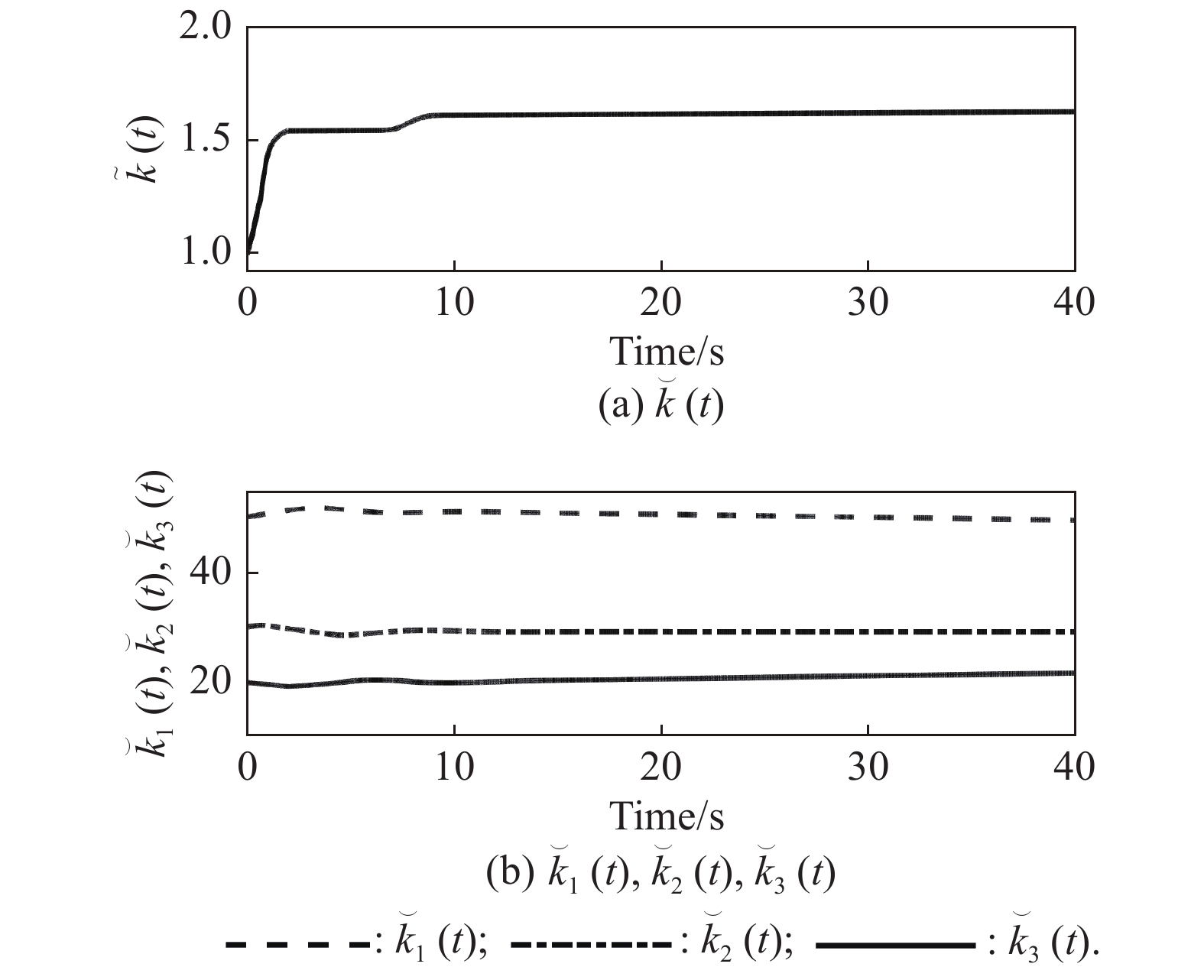
Fig 14
"
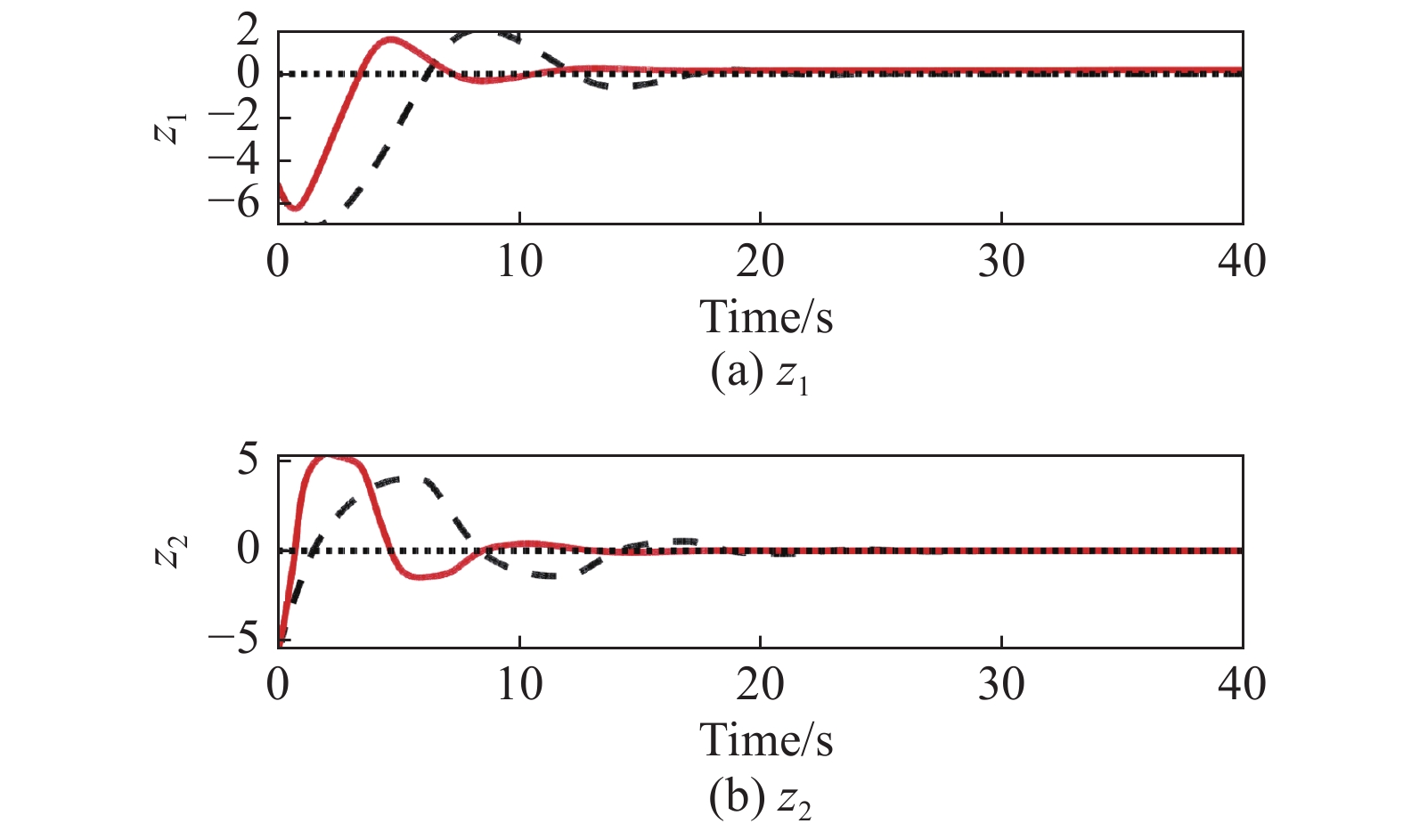
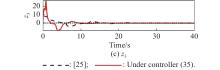
Fig 14
Comparison results of states ${{{z}}_{{1}}},{{{z}}_{{2}}},{{{z}}_{{3}}}$ in system (33) between our controller (35) and the method in [25] "
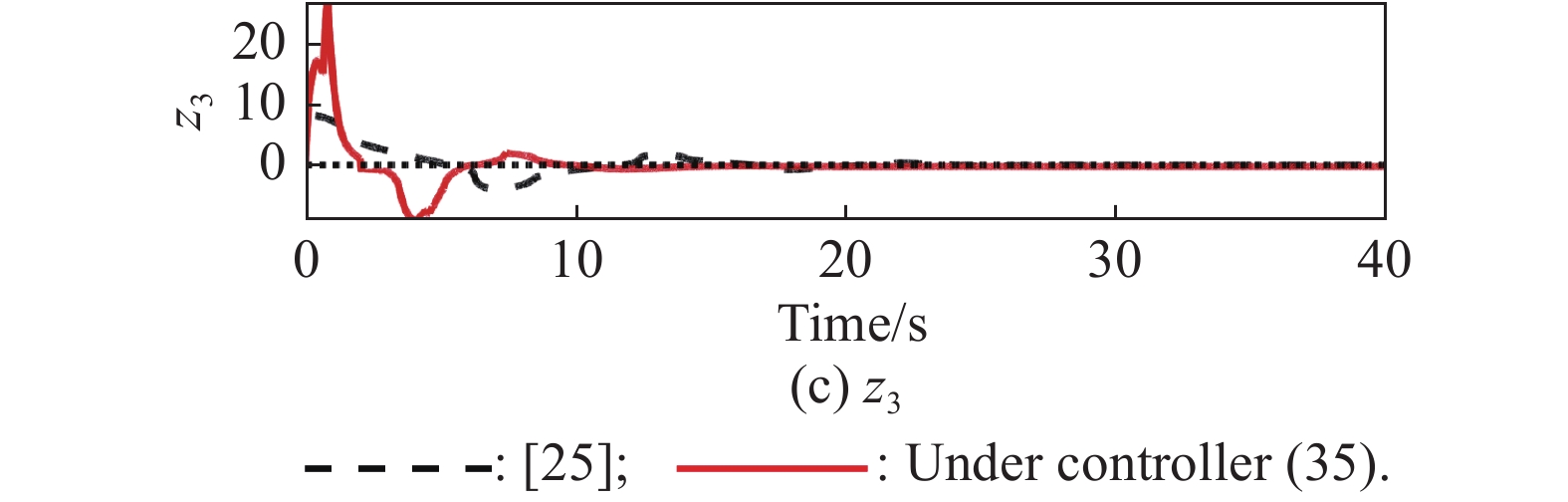
Fig 15
Comparison results of states ${{{z}}_{{1}}},{{{z}}_{{2}}},{{{z}}_{{3}}}$ in system (33) between our controller (35) and the method in [33] "
| 1 |
AL-GHANIMI A, ZHENG J, MAN Z A fast non-singular terminal sliding mode control based on perturbation estimation for piezoelectric actuators systems. International Journal of Control, 2017, 90 (3): 480- 491.
doi: 10.1080/00207179.2016.1185157 |
| 2 | TALEB M, PLESTAN F Adaptive robust controller based on integral sliding mode concept. International Journal of Control, 2016, 89 (6): 1788- 1798. |
| 3 |
BARTOLINI G, LEVANT A, PISANO A, et al Adaptive second-order sliding mode control with uncertainty compensation. International Journal of Control, 2016, 89 (9): 1747- 1758.
doi: 10.1080/00207179.2016.1142616 |
| 4 |
SUN J G, SONG S M, CHEN H T Fast terminal sliding mode tracking control of hypersonic vehicles based on non-homogeneous disturbance observer. International Journal of Control Automation and Systems, 2017, 15 (6): 2646- 2659.
doi: 10.1007/s12555-016-0785-0 |
| 5 |
ZHONG R, XU S Neural-network-based terminal sliding-mode control for thrust regulation of a tethered space-tug. Astrodynamics, 2018, 2 (2): 175- 185.
doi: 10.1007/s42064-017-0019-0 |
| 6 | HOU Z W, LU P, TU Z J Nonsingular terminal sliding mode control for a quadrotor UAV with a total rotor failure. Aerospace Science and Technology, 2020, 98, 1- 18. |
| 7 |
LABBADI M, CHERKAOUI M Robust adaptive nonsingular fast terminal sliding-mode tracking control for an uncertain quadrotor UAV subjected to disturbances. ISA Transactions, 2020, 99, 290- 304.
doi: 10.1016/j.isatra.2019.10.012 |
| 8 |
GENG J, SHENG Y Z, LIU X D Finite-time sliding mode attitude control for a reentry vehicle with blended aerodynamic surfaces and a reaction control system. Chinese Journal of Aeronautics, 2014, 27 (4): 964- 976.
doi: 10.1016/j.cja.2014.03.013 |
| 9 |
BAEK J, JIN M L, HAN S H A new adaptive sliding-mode control scheme for application to robot manipulators. IEEE Trans. on Industrial Electronics, 2016, 63 (6): 3628- 3637.
doi: 10.1109/TIE.2016.2522386 |
| 10 |
LEE J Y, CHANG P H, JIN M L Adaptive integral sliding mode control with time-delay estimation for robot manipulators. IEEE Trans. on Industrial Electronics, 2017, 64 (8): 6796- 6804.
doi: 10.1109/TIE.2017.2698416 |
| 11 |
RSETAM K, CAO Z W, MAN Z H Cascaded extended state observer based sliding mode control for underactuated flexible joint robot. IEEE Trans. on Industrial Electronics, 2020, 67 (12): 10822- 10832.
doi: 10.1109/TIE.2019.2958283 |
| 12 | ZUO Z Y Non-singular fixed-time terminal sliding mode control of non-linear systems. IET Control Theory and Applications, 2014, 9 (4): 545- 552. |
| 13 | HOU H Z, YU X H, XU L, et al Finite-time continuous terminal sliding mode control of servo motor systems. IEEE Trans. on Industrial Electronics, 2019, 67 (7): 5647- 5656. |
| 14 |
MONDAL S, MAHANTA C Adaptive second order terminal sliding mode controller for robotic manipulators. Journal of the Franklin Institute-Engineering and Applied Mathematics, 2014, 351 (4): 2356- 2377.
doi: 10.1016/j.jfranklin.2013.08.027 |
| 15 |
UTKIN V I Variable structure systems with sliding modes. IEEE Trans. on Automatic Control, 1977, 22 (2): 212- 222.
doi: 10.1109/TAC.1977.1101446 |
| 16 | XU J, LIM C C, SHI P Sliding mode control of singularly perturbed systems and its application in quad-rotors. International Journal of Control, 2017, 92 (6): 1325- 1334. |
| 17 |
SHTESSEL Y, TALEB M, PLESTAN F A novel adaptive-gain super-twisting sliding mode controller: methodology and application. Automatica, 2012, 48 (5): 759- 769.
doi: 10.1016/j.automatica.2012.02.024 |
| 18 |
ZHANG Y Y, LI R F, XUE T, et al An analysis of the stability and chattering reduction of high-order sliding mode tracking control for a hypersonic vehicle. Information Sciences, 2016, 348, 25- 48.
doi: 10.1016/j.ins.2016.02.012 |
| 19 |
ASL S B F, MOOSAPOUR S S Adaptive backstepping fast terminal sliding mode controller design for ducted fan engine of thrust-vectored aircraft. Aerospace Science and Technology, 2017, 71, 521- 529.
doi: 10.1016/j.ast.2017.10.001 |
| 20 |
FENG Y, YU X H, MAN Z H Non-singular terminal sliding mode control of rigid manipulators. Automatica, 2002, 38 (12): 2159- 2167.
doi: 10.1016/S0005-1098(02)00147-4 |
| 21 | DING S H, LIU L, PARK J H A novel adaptive nonsingular terminal sliding mode controller design and its application to active front steering system. International Journal of Robust and Nonlinear Control, 2019, 29 (12): 4250- 4269. |
| 22 |
YI S C, ZHAI J Y Adaptive second-order fast nonsingular terminal sliding mode control for robotic manipulators. ISA Transactions, 2019, 90, 41- 51.
doi: 10.1016/j.isatra.2018.12.046 |
| 23 |
CHEN T L, WU Y C Design of integral variable structure controller and application to electrohydraulic velocity servosystems. Control Theory and Applications, 1991, 138 (5): 439- 444.
doi: 10.1049/ip-d.1991.0060 |
| 24 | SESHAGIRI S, KHALIL H K Robust output feedback regulation of minimum-phase nonlinear systems using conditional integrators. Automatica, 2005, 41 (1): 43- 54. |
| 25 |
LEVANT A Sliding order and sliding accuracy in sliding mode control. International Journal of Control, 1993, 58 (6): 1247- 1263.
doi: 10.1080/00207179308923053 |
| 26 |
TIWARI P M, JANARDHANAN S, NABI M U Attitude control using higher order sliding mode. Aerospace Science and Technology, 2016, 54, 108- 113.
doi: 10.1016/j.ast.2016.04.012 |
| 27 |
MONDAL S, MAHANTA C Adaptive integral higher order sliding mode controller for uncertain systems. Journal of Control Theory and Applications, 2013, 11 (1): 61- 68.
doi: 10.1007/s11768-013-1180-5 |
| 28 |
ESTRADA A, PLESTAN F Second order sliding mode output feedback control with switching gains-application to the control of a pneumatic actuator. Journal of the Franklin Institute-Engineering and Applied Mathematics, 2014, 351 (4): 2335- 2355.
doi: 10.1016/j.jfranklin.2013.07.011 |
| 29 |
TALEB M, PLESTAN F, BOUOULID B An adaptive solution for robust control based on integral high-order sliding mode concept. International Journal of Robust and Nonlinear Control, 2015, 25 (8): 1201- 1213.
doi: 10.1002/rnc.3135 |
| 30 |
DING S H, LEVANT A, LI S H Simple homogeneous sliding-mode controller. Automatica, 2016, 67, 22- 32.
doi: 10.1016/j.automatica.2016.01.017 |
| 31 |
GUTIERREZ S V, DE L J, PLESTAN F, et al A simplified version of adaptive super-twisting control. International Journal of Robust and Nonlinear Control, 2019, 29 (16): 5704- 5719.
doi: 10.1002/rnc.4681 |
| 32 |
BHAT S P, BERNSTEIN D S Geometric homogeneity with applications to finite-time stability. Mathematics of Control Signals and Systems, 2005, 17 (2): 101- 127.
doi: 10.1007/s00498-005-0151-x |
| 33 |
LI P, YU X, XIAO B Adaptive quasi-optimal higher order sliding-mode control without gain overestimation. IEEE Trans. on Industrial Informatics, 2018, 14 (9): 3881- 3891.
doi: 10.1109/TII.2017.2787701 |
| 34 |
CONG B L, CHEN Z, LIU X D On adaptive sliding mode control without switching gain overestimation. International Journal of Robust and Nonlinear Control, 2014, 24 (3): 515- 531.
doi: 10.1002/rnc.2902 |
| 35 |
CHEN F Y, JIANG R Q, WEN C Y, et al Self-repairing control of a helicopter with input time delay via adaptive global sliding mode control and quantum logic. Information Sciences, 2015, 316, 123- 131.
doi: 10.1016/j.ins.2015.04.023 |
| 36 |
HUANG Y J, KUO T C, CHANG S H Adaptive sliding-mode control for nonlinear systems with uncertain parameters. IEEE Trans. on Systems, Man and Cybernetics, Part B (Cybernetics), 2008, 38 (2): 534- 539.
doi: 10.1109/TSMCB.2007.910740 |
| 37 | FILIPPOV A F Differential equations with discontinuous right hand sides. Dordrecht: Springer, 1988. |
| 38 | LEVANT A. Non-homogeneous finite-time-convergent differentiator. Proc. of the 48th IEEE Conference on Decision and Control held jointly with 2009 28th Chinese Control Conference, 2009: 8399−8404. |
| 39 |
PLESTAN F, SHTESSEL Y, BREGEAULT V, et al New methodologies for adaptive sliding mode control. International Journal of Control, 2010, 83 (9): 1907- 1919.
doi: 10.1080/00207179.2010.501385 |
| 40 |
ZONG Q, ZHAO Z S, ZHANG J Higher order sliding mode control with self-tuning law based on integral sliding mode. IET Control Theory and Applications, 2010, 4 (7): 1282- 1289.
doi: 10.1049/iet-cta.2008.0610 |
| 41 | BENALIA A, DJEMAI M, BARBOT J P. Control of the kinematic car using trajectory generation and the high order sliding mode control. Proc. of the IEEE International Conference on Systems, Man and Cybernetics, 2003, 3: 2455−2460. |
| 42 |
LEVANT A Universal single-input-output (SISO) sliding-mode controllers with finite-time convergence. IEEE Trans. on Automatic Control, 2001, 46 (9): 1447- 1451.
doi: 10.1109/9.948475 |
| 43 |
MURRAY R M, SASTRY S S Nonholonomic motion planning: steering using sinusoids. IEEE Trans. on Automatic Control, 1993, 38 (5): 700- 716.
doi: 10.1109/9.277235 |
| 44 | LEVANT A Higher-order sliding modes, differentiation and output-feedback control. International Journal of Control, 2003, 76 (9/10): 924- 941. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||