
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (3): 700-710.doi: 10.23919/JSEE.2021.000060
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Zongxing LI*( ), Rui ZHANG()
), Rui ZHANG()
Received:2020-06-11
Online:2021-06-18
Published:2021-07-26
Contact:
Zongxing LI
E-mail:1843042719@qq.com;20328587@qq.com
About author:Supported by:Zongxing LI, Rui ZHANG. Time-varying sliding mode control of missile based on suboptimal method[J]. Journal of Systems Engineering and Electronics, 2021, 32(3): 700-710.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
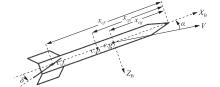
Fig 1
Missile longitudinal model"
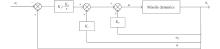
Fig 2
Closed-loop system with pseudo-angle-of-attack feedback control law"
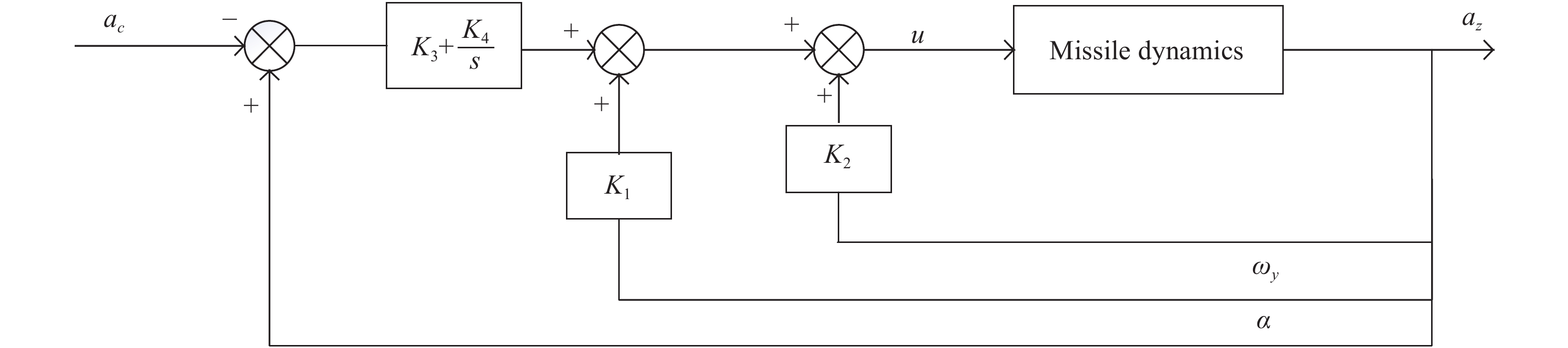
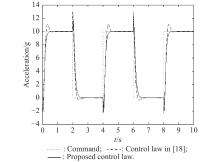
Fig 3
Simulation results under nominal model at ${{2{{{M}}_{{a}}}}}$ "
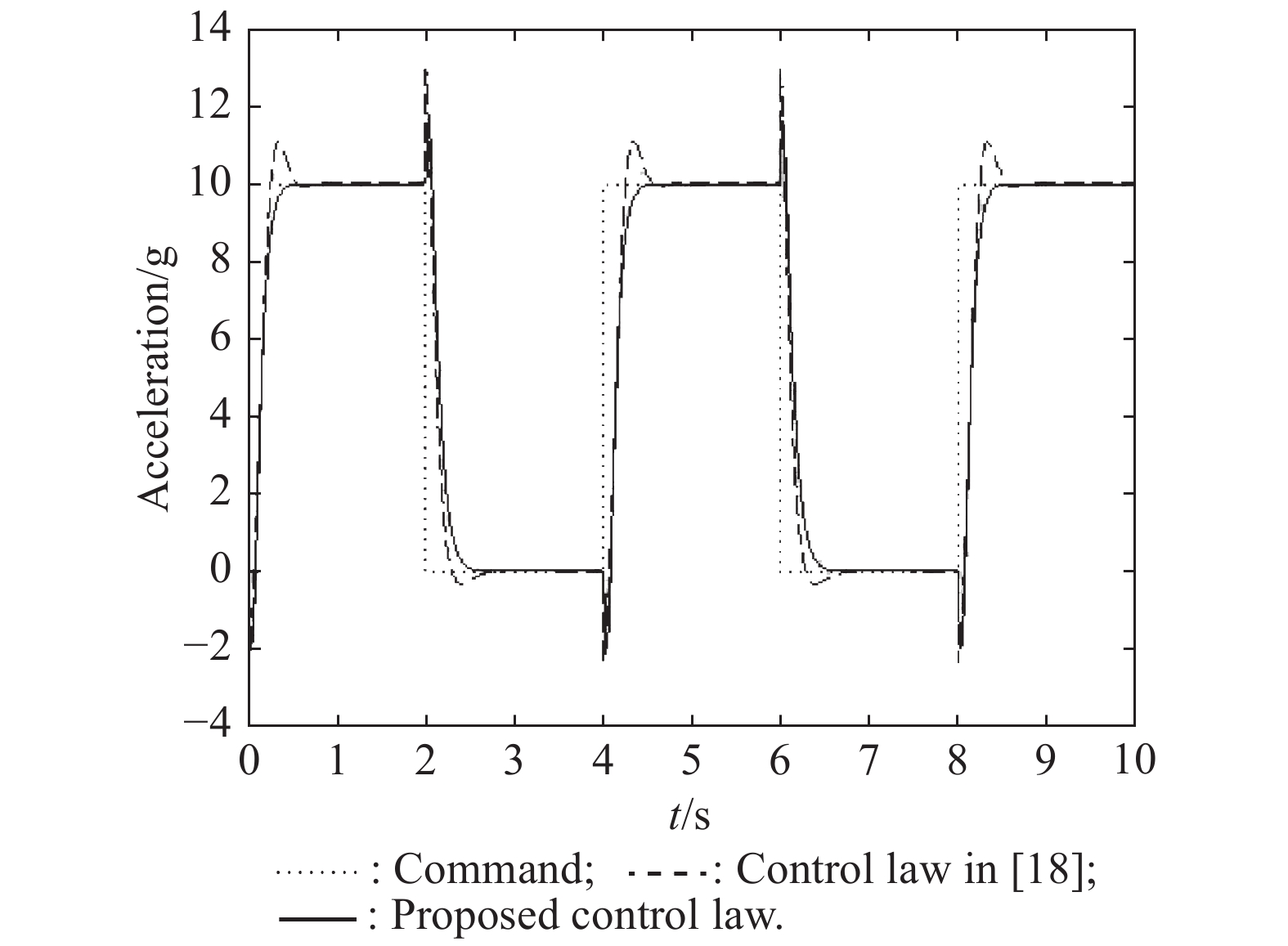
Fig 4
Rudder deflection angle under nominal model at ${{{2}}{{{M}}_{{a}}} }$ "
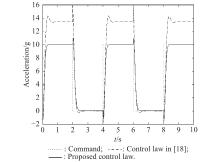
Fig 5
Simulation results under real model at ${{{2}}{{{M}}_{{a}}} }$ "
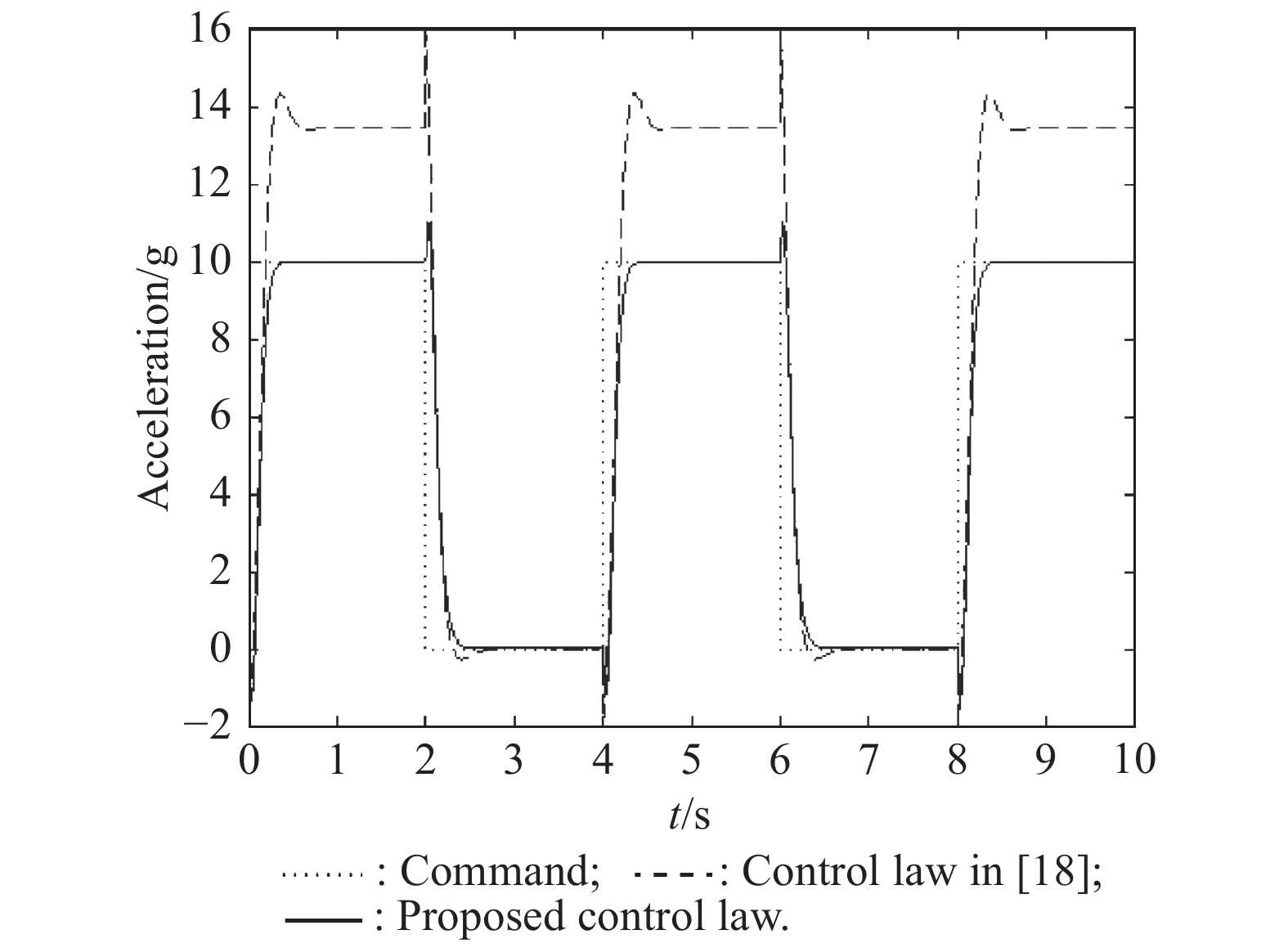
Fig 6
Rudder deflection angle under real model at ${{{2}}{{{M}}_{{a}}} }$ "
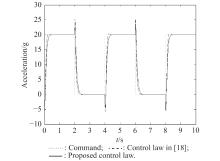
Fig 7
Simulation results under nominal model at ${{{3}}{{{M}}_{{a}}} }$ "
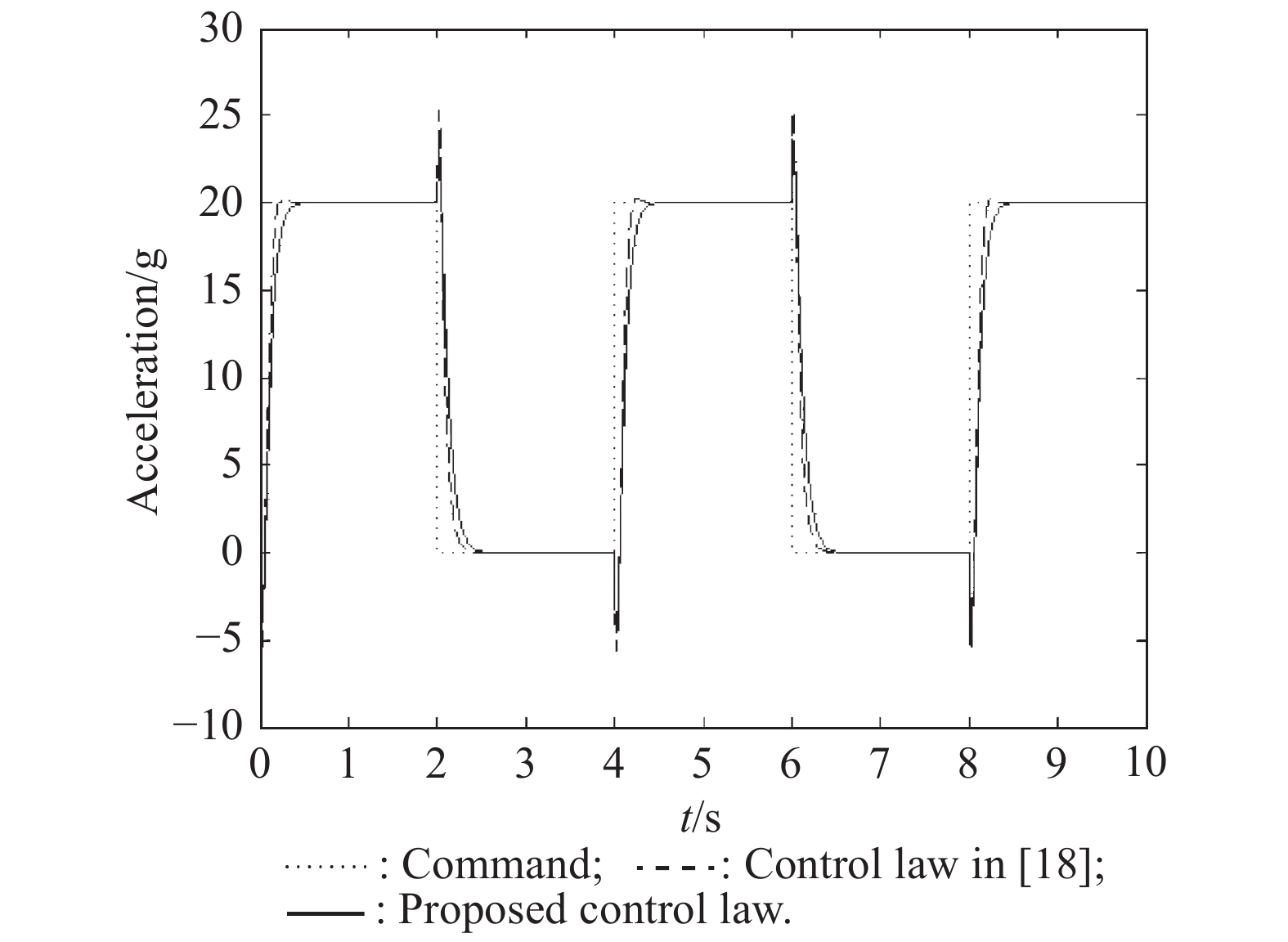
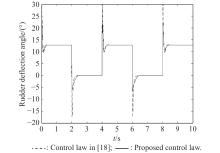
Fig 8
Rudder deflection angle under nominal model at ${{{3}}{{{M}}_{{a}}} }$ "
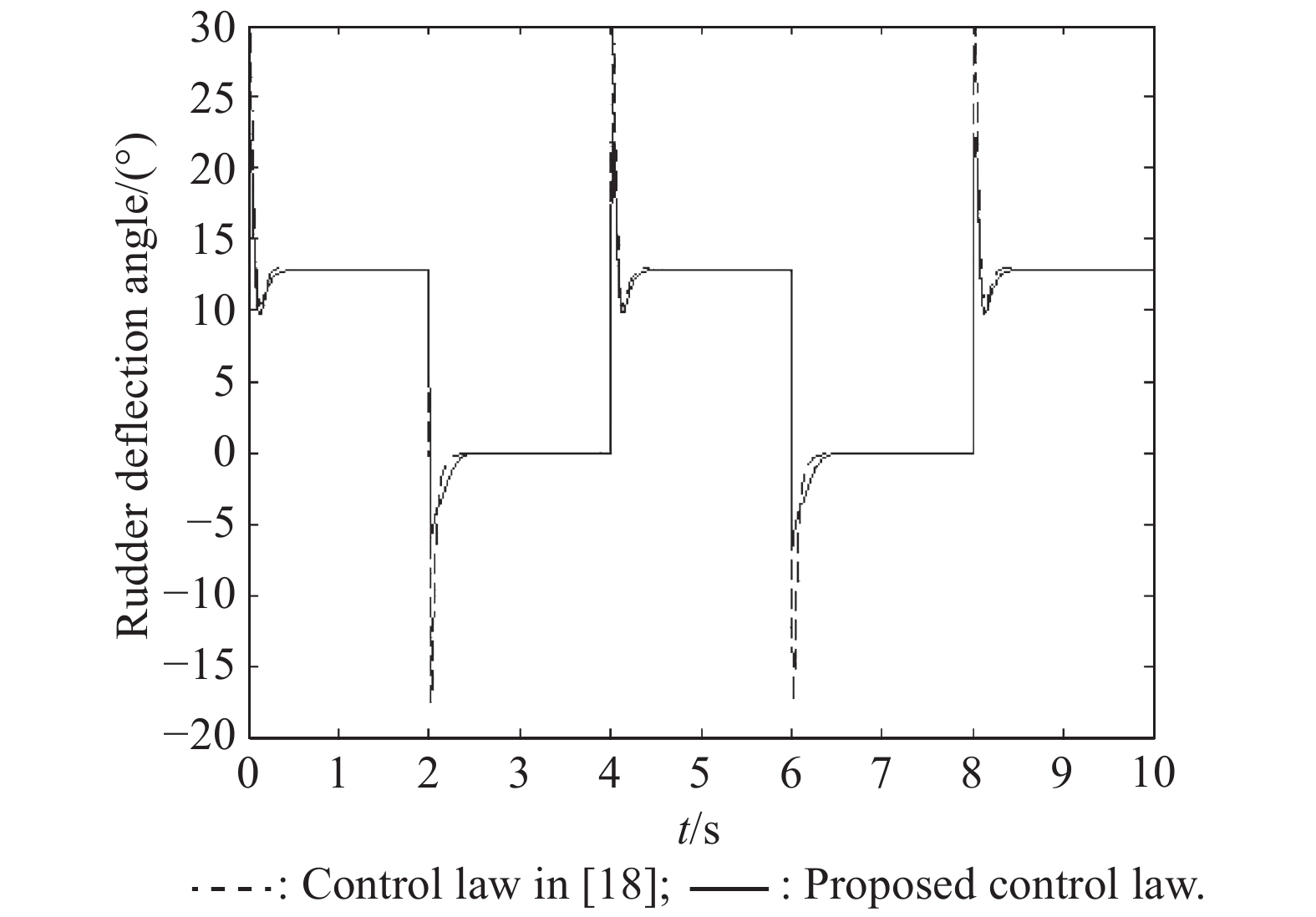
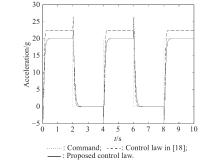
Fig 9
Simulation results under real model at ${{{3}}{{{M}}_{{a}}} }$ "
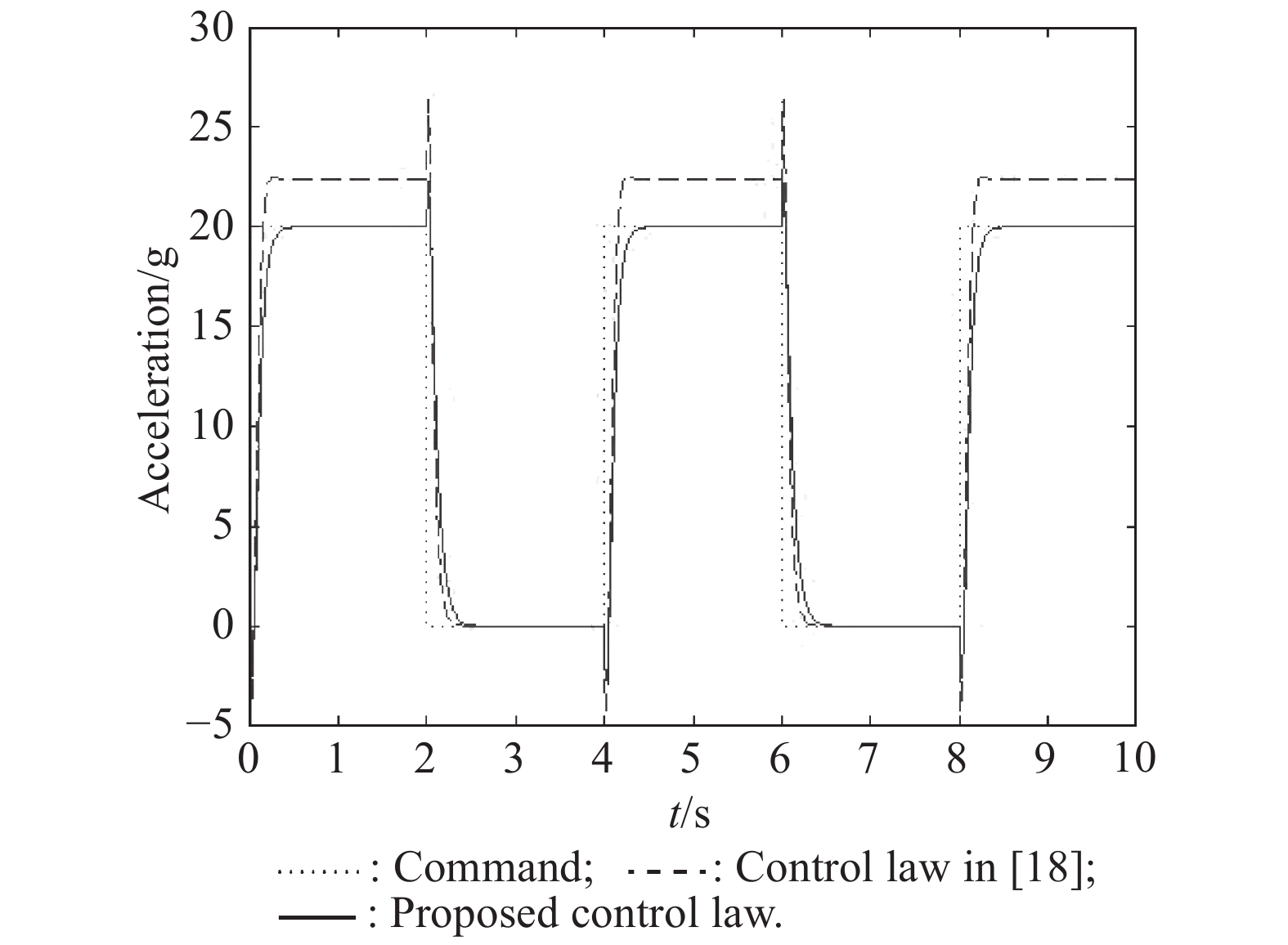
Fig 10
Rudder deflection angle under real model at ${{{3}}{{{M}}_{{a}}} }$ "
| 1 | WANG Q, CHEN Y, ZHANG Y X, et al. Optimal control theory, method and applications. Beijing: Higher Education Press, 2011. (in Chinese) |
| 2 | ZHENG D Z. Linear system theory. Beijing: Tsinghua University Press, 2002. (in Chinese) |
| 3 | HU S S. Autocontrol elements. Beijing: Science Press, 2013. (in Chinese) |
| 4 |
BAHARE K, KYRIAKOS G V, HAMIDREZA M Optimal and autonomous control using reinforcement learning: a survey. IEEE Trans. on Neural Networks and Learning Systems, 2018, 29 (6): 2042- 2062.
doi: 10.1109/TNNLS.2017.2773458 |
| 5 |
XING L D, ZHANG K N, CHEN W C Optimal control and output feedback considerations for missile with blended aero-fin and lateral impulsive thrust. Chinese Journal of Aeronautics, 2010, 23 (4): 401- 408.
doi: 10.1016/S1000-9361(09)60234-X |
| 6 | JEAN-JACQUES E S, LI W P. Applied nonlinear control. New Jersey: Prentice Hall, 1991. |
| 7 | EUGENE L, KEVIN A W. Robust and adaptive control with aerospace applications. London: Springer-Verlag, 2013. |
| 8 |
TAYFUN C Survey of state-dependent Riccati equation in nonlinear optimal feedback control synthesis. Journal of Guidance, Control, and Dynamics, 2012, 35 (4): 1025- 1047.
doi: 10.2514/1.55821 |
| 9 |
TAYFUN C Systematic and effective design of nonlinear feedback controllers via the state-dependent Riccati equation method. Annual Reviews in Control, 2010, 34 (1): 32- 51.
doi: 10.1016/j.arcontrol.2010.03.001 |
| 10 |
MASSARI M, ZAMARO M Application of SDRE technique to orbital and attitude control of spacecraft formation flying. Acta Astronautica, 2014, 94 (1): 409- 420.
doi: 10.1016/j.actaastro.2013.02.001 |
| 11 |
JAGAT A, SINCLAIR A J Nonlinear control for spacecraft pursuit-evasion game using the state-dependent Riccati equation method. IEEE Trans. on Aerospace and Electronic Systems, 2017, 53 (6): 3032- 3042.
doi: 10.1109/TAES.2017.2725498 |
| 12 | TANG G Y Suboptimal control for nonlinear systems: a successive approximation approach. Systems & Control Letters, 2005, 54 (5): 429- 434. |
| 13 |
JIANG C H, KOK L T, DUAN G R A suboptimal feedback control for nonlinear time-varying systems with continuous inequality constraints. Automatica, 2012, 48, 660- 665.
doi: 10.1016/j.automatica.2012.01.019 |
| 14 |
LOXTON R, TEO K L, REHBOCK V Robust suboptimal control of nonlinear systems. Applied Mathematics and Computation, 2011, 217 (14): 6566- 6576.
doi: 10.1016/j.amc.2011.01.039 |
| 15 |
JAEHO L, YONGWOO L, YOUDAN K Design of an adaptive missile autopilot considering the boost phase using the SDRE method and neural networks. Journal of Franklin Institute, 2018, 355 (18): 9085- 9107.
doi: 10.1016/j.jfranklin.2016.12.004 |
| 16 |
CHEN C C, LIANG Y W, JHU W M Global stability of a system with state-dependent Riccati equation controller. Journal of Guidance, Control, and Dynamics, 2015, 38 (10): 2050- 2054.
doi: 10.2514/1.G000989 |
| 17 |
ERDEM E B, ALLEYNE A G Design of a class of nonlinear controllers via state dependent Riccati equations. IEEE Trans. on Control Systems Technology, 2004, 12 (1): 133- 137.
doi: 10.1109/TCST.2003.819588 |
| 18 |
JAEHO L, NAMHOON C, YOUDAN K Analysis of missile longitudinal autopilot based on the state-dependent Riccati equation method. Journal of Guidance, Control, and Dynamics, 2019, 42 (10): 2183- 2196.
doi: 10.2514/1.G003679 |
| 19 | FANG Y C, LU G Z. Nonlinear system theory. Beijing: Tsinghua University Press, 2009. (in Chinese) |
| 20 | YAO B. Advanced motion control: from classical PID to nonlinear adaptive robust control. Proc. of the 11th IEEE International Workshop on Advanced Motion Control, 2010: 815−829. |
| 21 | GUO J, CHEN Q W, WU Y F Adaptive robust control for a class of uncertain nonlinear system. Control Theory & Applications, 2010, 27 (8): 1081- 1085. |
| 22 | GUO J, CHEN Q W, WU Y F Adaptive control of a nonlinear system with input backlash. Acta Armamentarii, 2008, 37 (5): 637- 640. |
| 23 |
SAQIB I, ADEEL M, MUHAMMAD T R Advanced sliding mode control techniques for inverted pendulum: modelling and simulation. Engineering Science and Technology, an International Journal, 2018, 21 (4): 753- 759.
doi: 10.1016/j.jestch.2018.06.010 |
| 24 | CHEN X X, WANG T, ZHAO Y K An adaptive fuzzy sliding mode control for angle tracking of human musculoskeletal arm model. Computers & Electrical Engineering, 2018, 72, 214- 223. |
| 25 | HASSAN K K. Nonlinear control. New York: Pearson Education Inc., 2014. |
| 26 | YOUNG K D, OZGUNER U Co-states for sliding mode design in linear systems. Systems & Control Letters, 1996, 27 (4): 233- 242. |
| 27 | SALAMCI M U, TOMBUL G S. Sliding mode control design with time varying sliding surfaces for a class of nonlinear systems. Proc. of the IEEE International Conference on Control Applications, 2006: 996−1001. |
| 28 |
CHOI S B, PARK D W Moving sliding surfaces for fast tracking control of second-order dynamical systems. Journal of Dynamical Systems Measurement and Control, 1994, 116 (1): 154- 158.
doi: 10.1115/1.2900671 |
| 29 |
DORLING C M, ZINOBER A S Two approaches to hyperplane design in multivariable variable structure control systems. International Journal of Control, 1986, 44 (1): 65- 82.
doi: 10.1080/00207178608933583 |
| 30 |
SALAMCI M U, OZGOREN M K, BANKS S P Sliding mode control with optimal sliding surfaces for missile autopilot design. Journal of Guidance, Control, and Dynamics, 2000, 23 (4): 719- 727.
doi: 10.2514/2.4588 |
| [1] | Narin JEERANANTASIN, Suksun NUNGAM. Sliding mode control of three-phase AC/DC converters using exponential rate reaching law [J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 210-221. |
| [2] | Vedadi Moghaddam TAHMINEH, Yadavar Nikravesh SEYYED KAMALEDDIN, Azam Khosravi MOHAMMAD. Constrained sliding mode control of nonlinear fractional order input affine systems [J]. Journal of Systems Engineering and Electronics, 2019, 30(5): 995-1006. |
| [3] | Haibo LIU, Heping WANG, Junlei SUN. Attitude control for QTR using exponential nonsingular terminal sliding mode control [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 191-200. |
| [4] | Yueneng YANG, Ye YAN. Backstepping sliding mode control for uncertain strictfeedback nonlinear systems using neural-network-based adaptive gain scheduling [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 580-586. |
| [5] | Yuhang YUN, Shengjing TANG, Jie GUO, Wei SHANG. Robust controller design for compound control missile with fixed bounded convergence time [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 116-133. |
| [6] | Xiaolei Li, Xiaoyuan Luo, Shaobao Li, Jianjin Li, and Xinping Guan. Consensus of second-order nonlinear multi-agent systems via sliding mode observer and controller [J]. Systems Engineering and Electronics, 2017, 28(4): 756-. |
| [7] | Ri Liu, Xiuxia Sun, Wenhan Dong, and Dong Wang. Finite-time adaptive sliding mode control for heavyweight airdrop operations [J]. Systems Engineering and Electronics, 2017, 28(2): 338-346. |
| [8] | Zhanshan Zhao, Hongru Gu, Jing Zhang, and Gang Ding. Terminal sliding mode control based on super-twisting algorithm [J]. Systems Engineering and Electronics, 2017, 28(1): 145-. |
| [9] | Xuejiao Sun, Rui Zhou, and Delong Hou. Output-feedback based partial integrated missile guidance and control law design [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1238-1248. |
| [10] | Wei Shang, Shengjing Tang, Jie Guo, Yueyue Ma, and Yuhang Yun. Robust sliding mode control with ESO for dual-control missile [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1073-1082. |
| [11] | Litong Ren, Shousheng Xie, Yu Zhang, Jingbo Peng, and Ledi Zhang. Chattering analysis for discrete sliding mode control of distributed control systems [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1096-1107. |
| [12] | Qingchun Li, Wensheng Zhang, Gang Han, and Yuan Xie. Fuzzy sliding mode control guidance law with terminal impact angle and acceleration constraints [J]. Systems Engineering and Electronics, 2016, 27(3): 664-679. |
| [13] | Yueneng Yang and Ye Yan. Decoupled nonsingular terminal sliding mode control for affine nonlinear systems [J]. Systems Engineering and Electronics, 2016, 27(1): 192-. |
| [14] | Chutiphon Pukdeboon. Adaptive backstepping finite-time sliding mode control of spacecraft attitude tracking [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 826-. |
| [15] | Xuemei Zheng, Peng Li, Haoyu Li, and Danmei Ding. Adaptive backstepping-based NTSM control for unmatched uncertain nonlinear systems [J]. Systems Engineering and Electronics, 2015, 26(3): 557-564. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||