
Journal of Systems Engineering and Electronics ›› 2021, Vol. 32 ›› Issue (6): 1477-1489.doi: 10.23919/JSEE.2021.000125
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Zhaoying LI( ), Shuai SHI(), Hao LIU*()
), Shuai SHI(), Hao LIU*()
Received:2020-07-06
Online:2022-01-05
Published:2022-01-05
Contact:
Hao LIU
E-mail:Lizhaoying@buaa.edu.cn;hongbaoshi0880@163.com;Liuhao13@buaa.edu.cn
About author:Supported by:Zhaoying LI, Shuai SHI, Hao LIU. Trajectory tracking of tail-sitter aircraft by
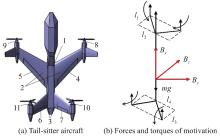
Fig 1
Schematics and motivation of tail-sitter aircraft"
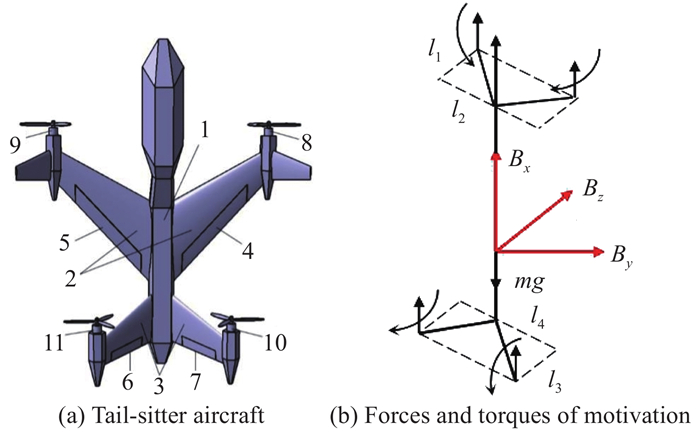
Fig 2
$ {\cal{{\boldsymbol{L}}}}_{\bf{1}}$ adaptive controller "
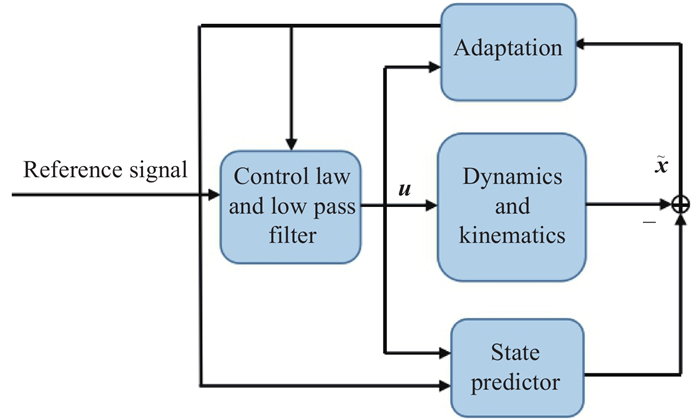
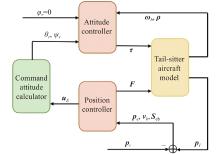
Fig 3
Fault tolerance of tail-sitter aircraft by $ {\cal{{\boldsymbol{L}}}}_{\bf{1}}$ adaptive control "
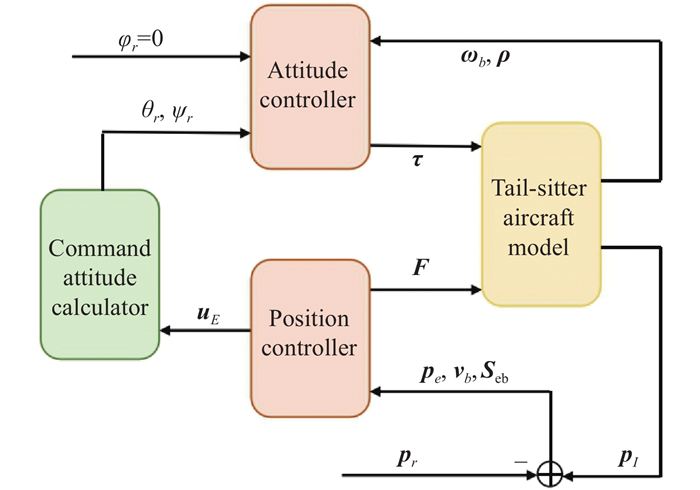
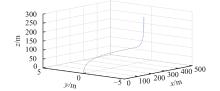
Fig 4
Reference trajectory"
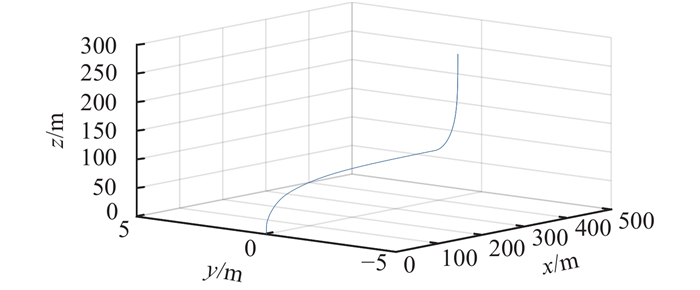
Table 1
Trajectory coefficients"
| Number | c1 | c2 | c3 | c4 |
| 1 | 0.0167 | ?0.0011 | 0.0097 | 0.0002557 |
| 2 | ?0.4249 | 0.1282 | ?0.3050 | ?0.0403 |
| 3 | 3.4834 | ?6.0742 | 3.4393 | 2.5215 |
| 4 | ?7.6921 | 139.3596 | ?15.4551 | ?77.6900 |
| 5 | 5.2976 | ?1521.2 | 10.6051 | 1167 |
| 6 | ?0.6466 | 6524.1 | ?2.3586 | ?6876.5 |

Fig 5
Position responses by H∞ controller in the state of free-fault "
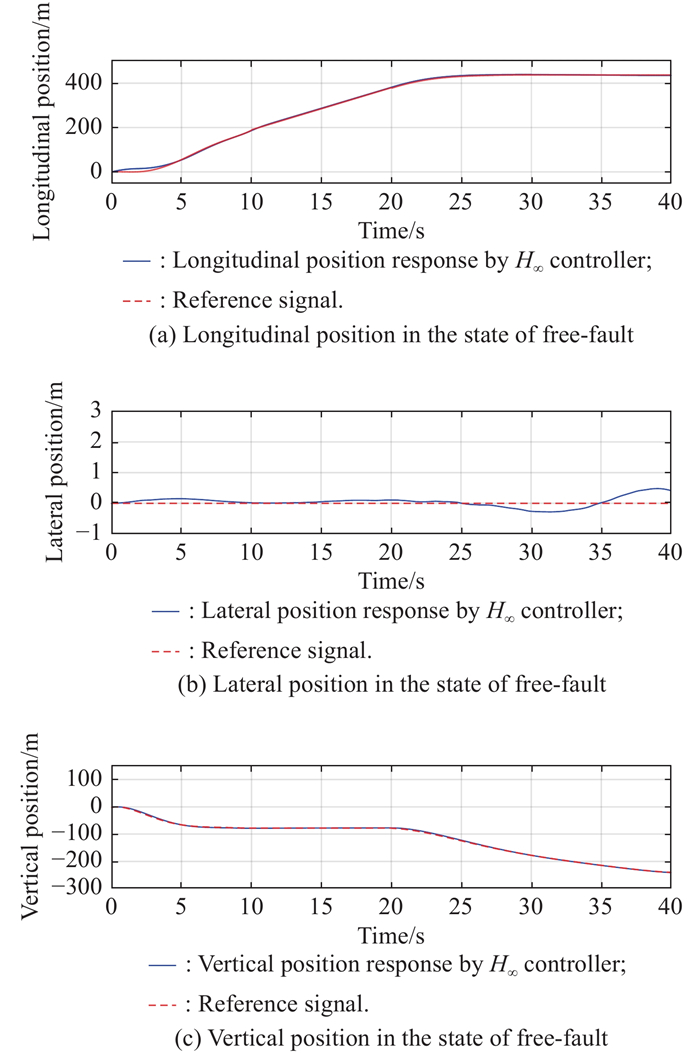

Fig 6
Position error responses by H∞ controller in the state of free-fault "
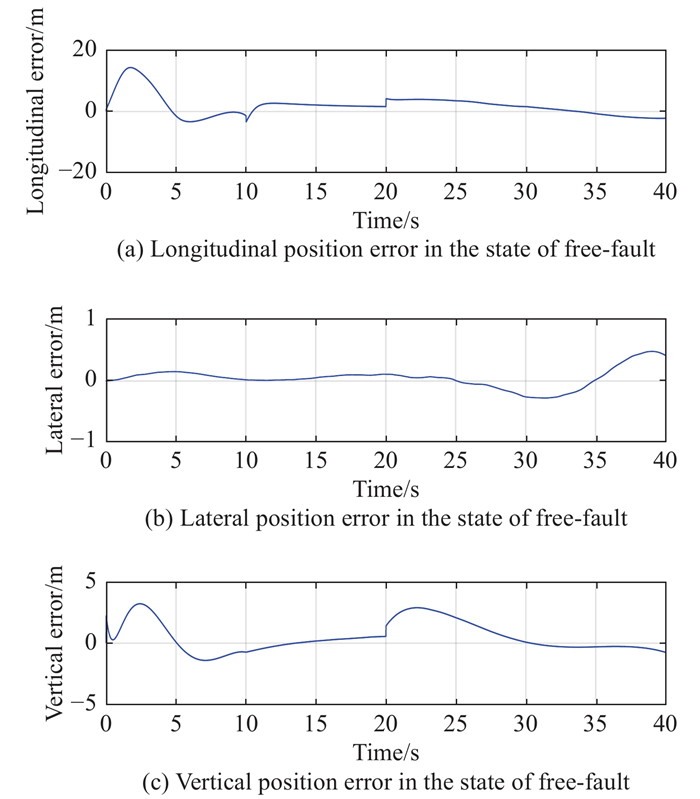
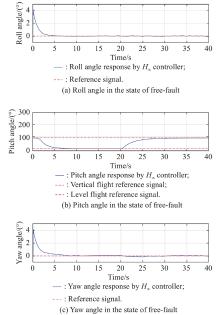
Fig 7
Attitude responses by H∞ controller in the state of free-fault "
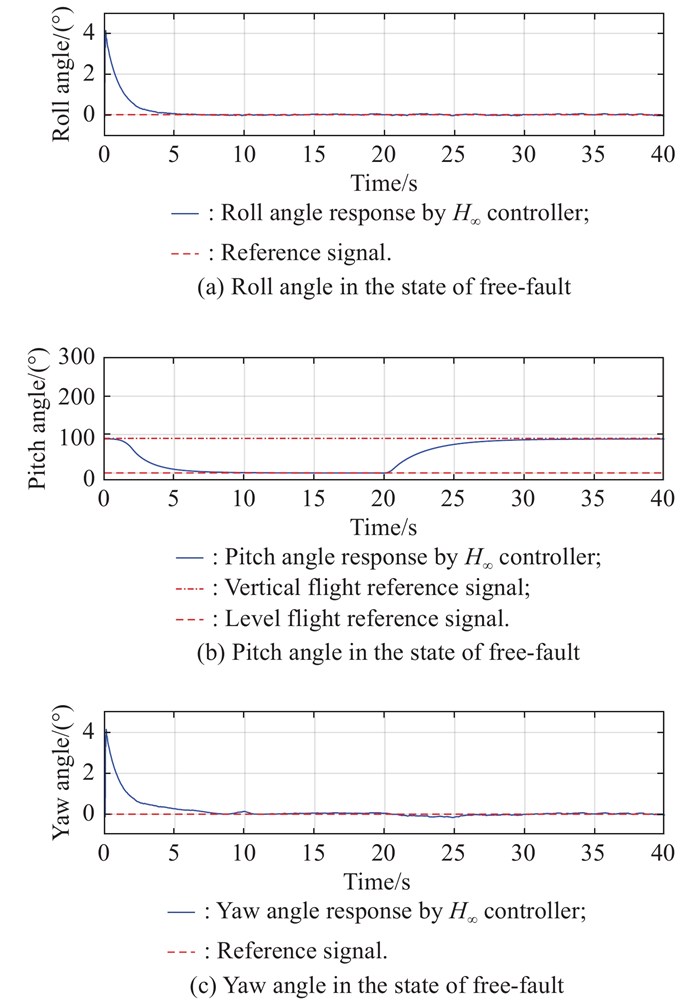

Fig 8
Control signal responses by H∞ controller in the state of free-fault "
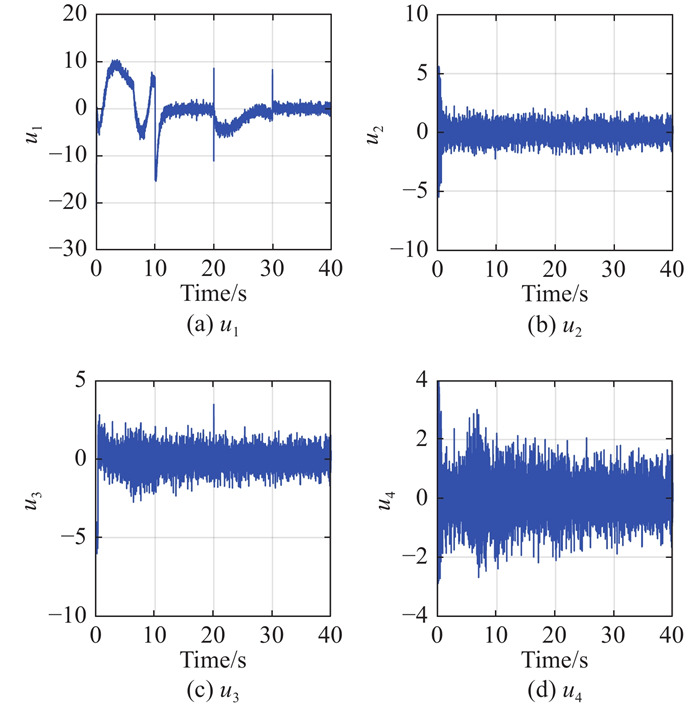
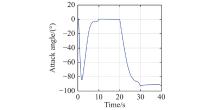
Fig 9
Attack angle responses by H∞ controller in the state of free-fault "
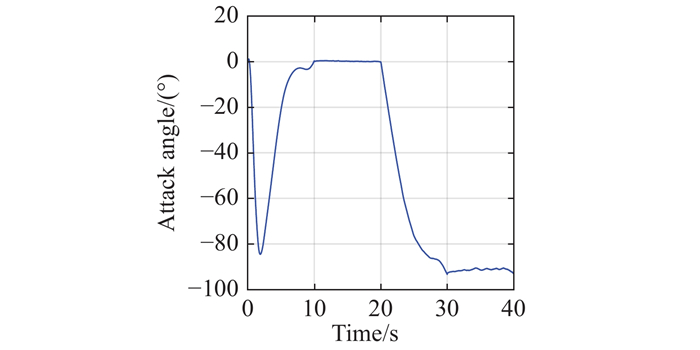

Fig 10
Trajectory comparison of reference trajectory, H∞ controller trajectory and $ {\cal{{\boldsymbol{L}}}}_{\bf{1}}$ adaptive controller trajectory in the state of fault tolerance "
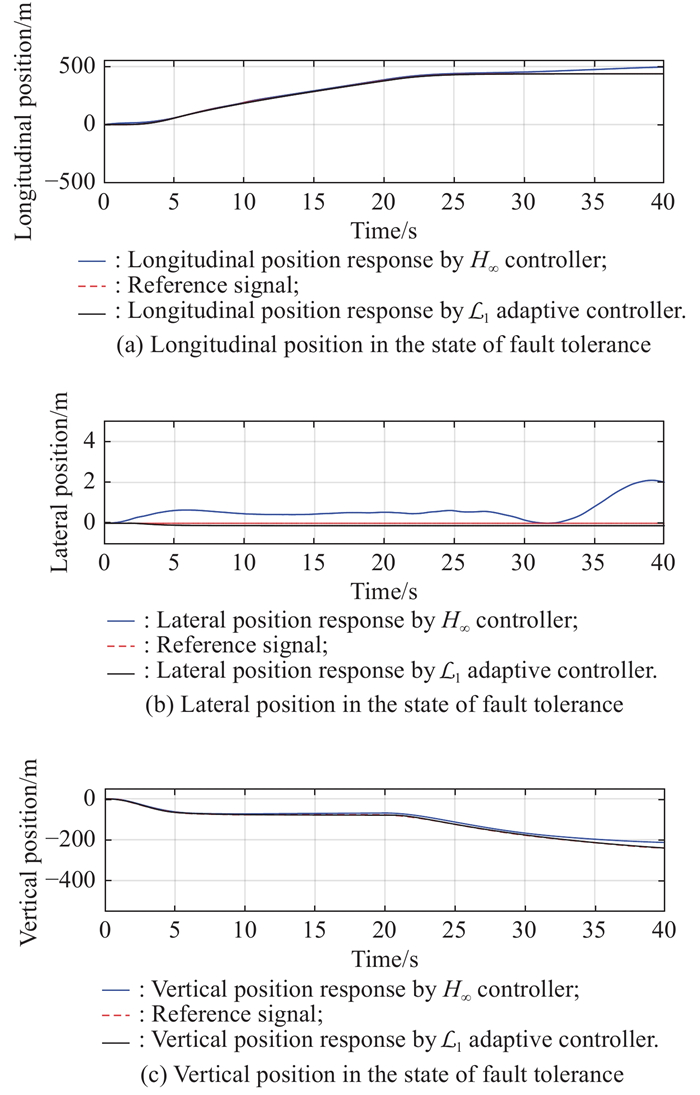

Fig 11
Position error response by $ {\cal{{\boldsymbol{L}}}}_{\bf{1}}$ adaptive controller in the state of fault tolerance "
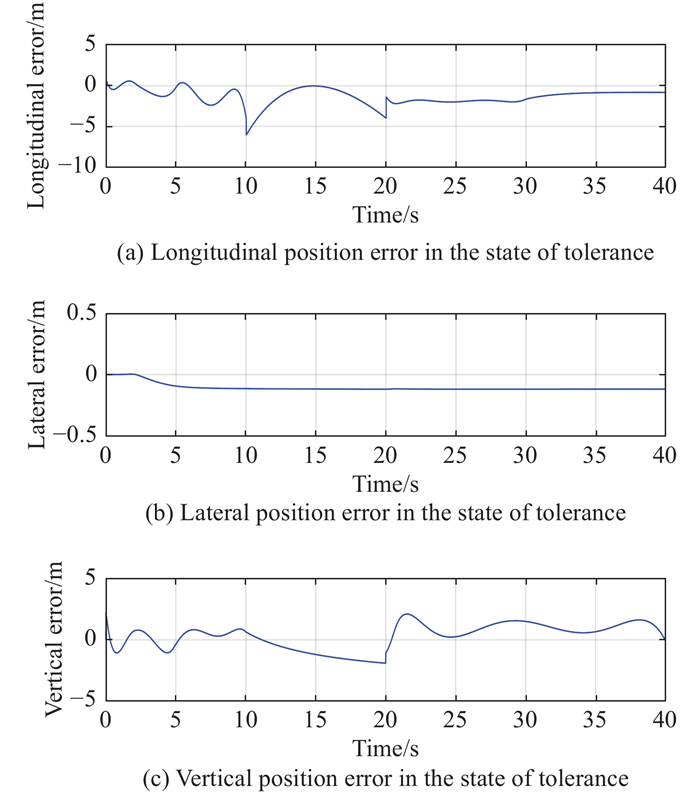

Fig 12
Euler angles of the results of $ {\cal{{\boldsymbol{L}}}}_{\bf{1}}$ adaptive controller in the state of fault tolerance "
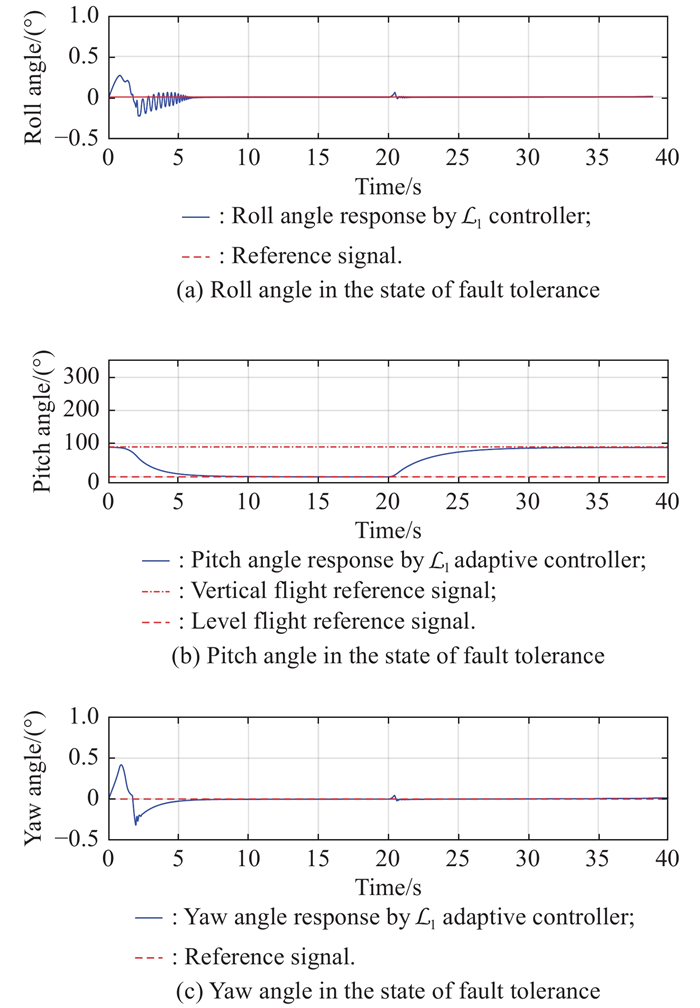

Fig 13
Control signal responses by $ {\cal{{\boldsymbol{L}}}}_{\bf{1}}$ controller in the state of fault tolerance "
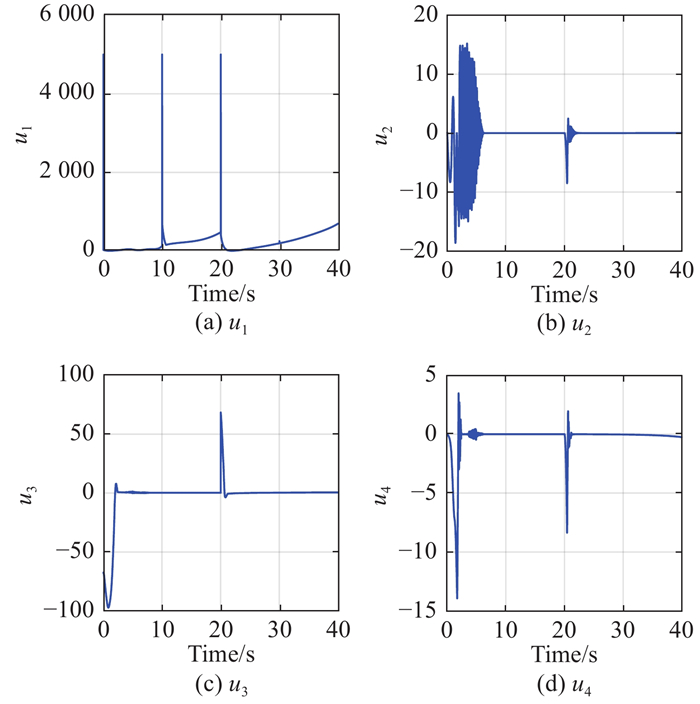
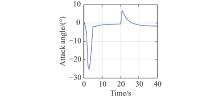
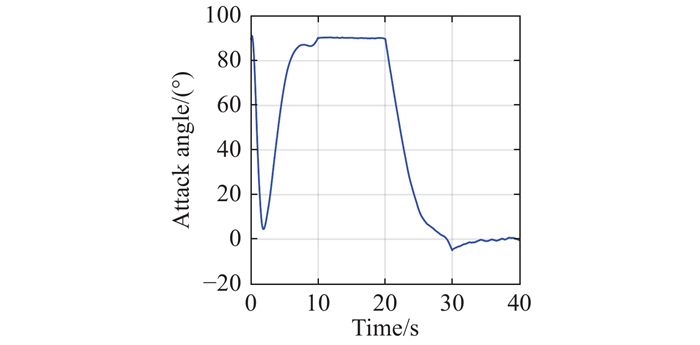
Fig 14
Attack angles responses by $ {\cal{{\boldsymbol{L}}}}_{\bf{1}}$ controller in the state of fault tolerance "
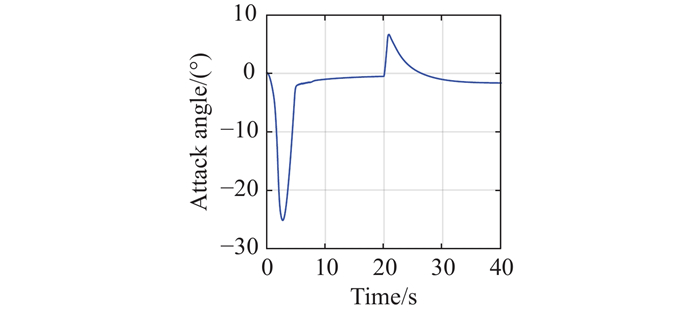

Fig 15
Estimated uncertainties response by $ {\cal{{\boldsymbol{L}}}}_{\bf{1}}$ controller in the state of fault tolerance "
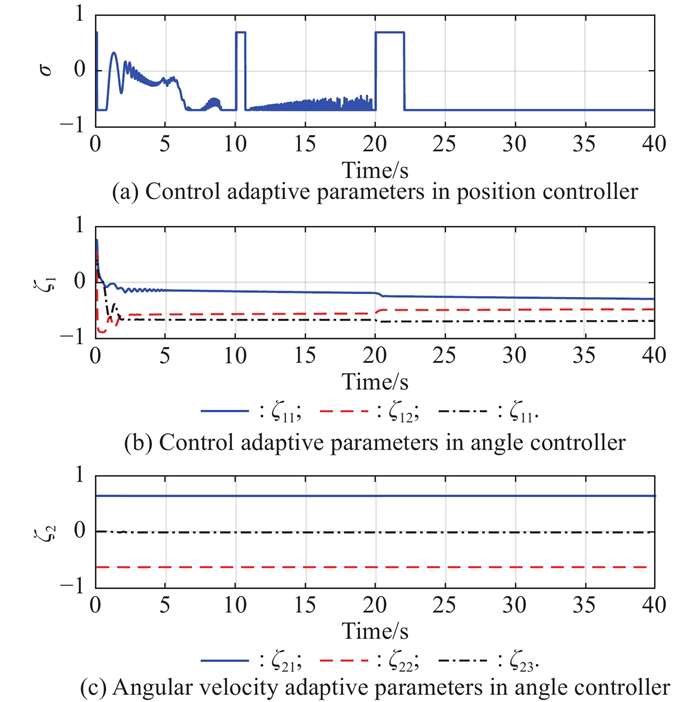
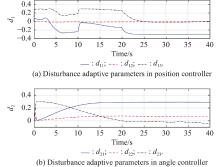
Fig 16
Estimated uncertainties response by $ {\cal{{\boldsymbol{L}}}}_{\bf{1}}$ controller in the state of fault tolerance "
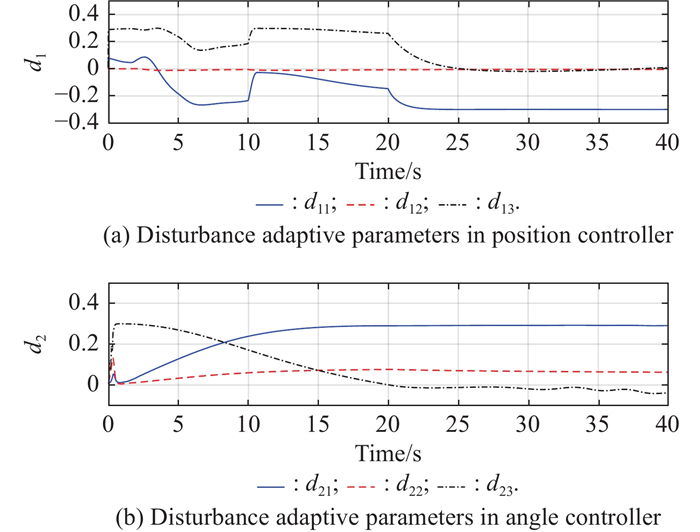

Fig 17
Position error response by H∞ controller in the state of fault tolerance "
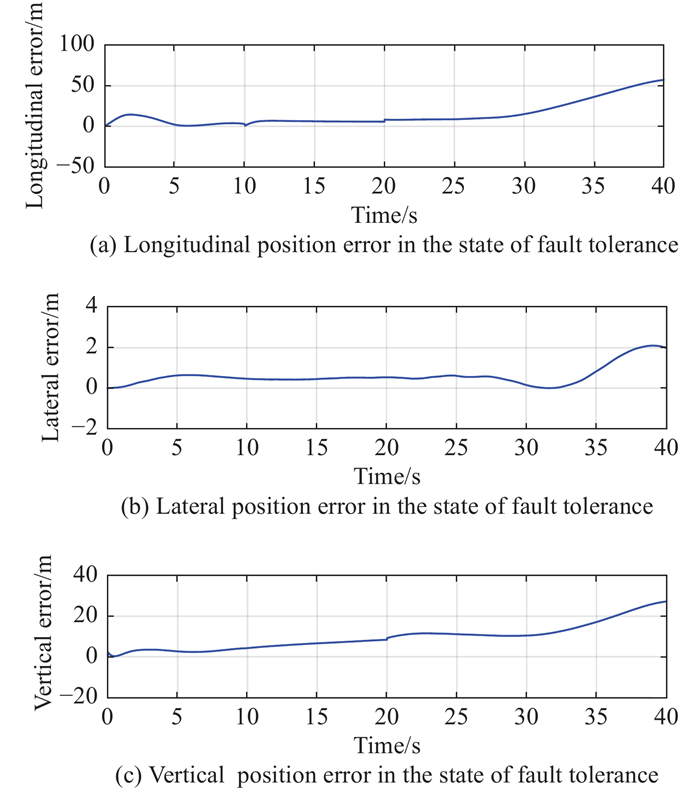
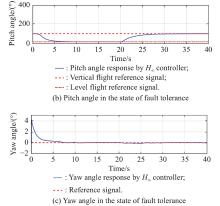
Fig 18
Attitude responses by H∞ controller in the state of fault tolerance "
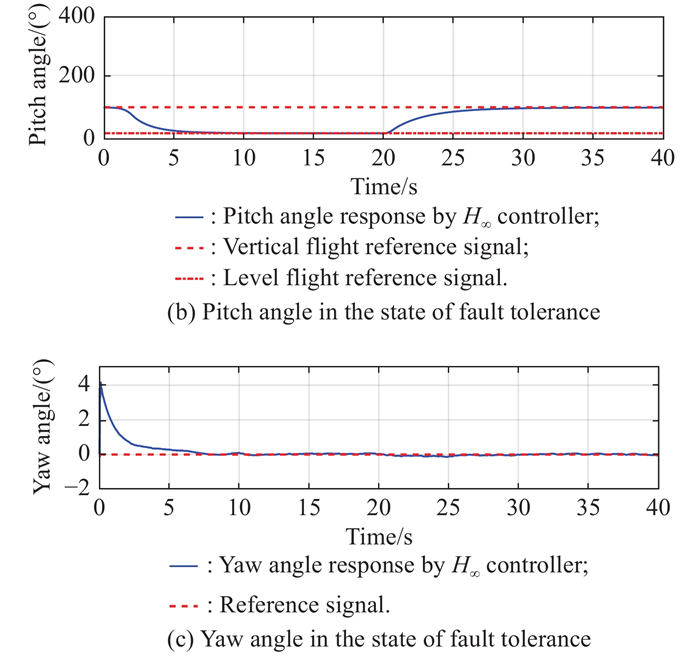

Fig 19
Control signal responses by H∞ controller in the state of fault tolerance "
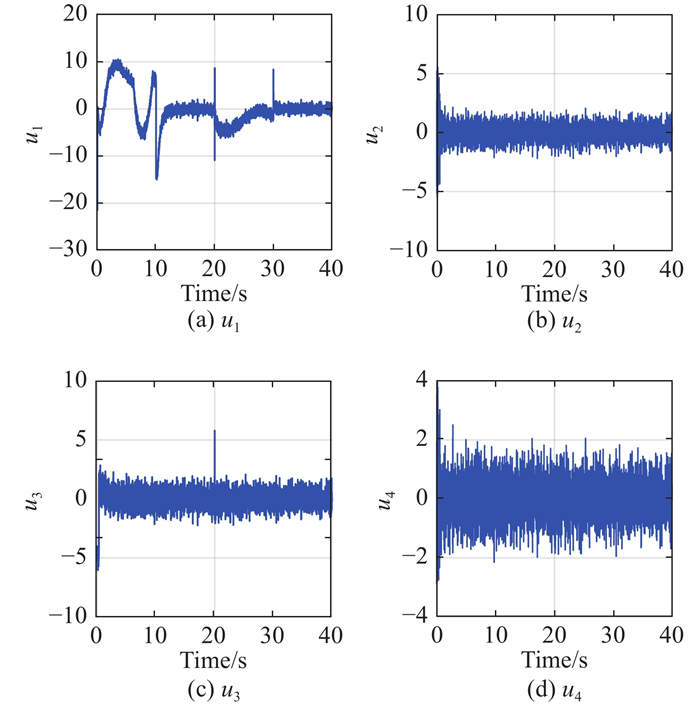
Fig 20
Attack angles response by H∞ controller in the state of fault tolerance "
| 1 | MADEMLIS I, MYGDALIS V, NIKOLAIDIS N Challenges in autonomous UAV cinematography: an overview. Proc. of the IEEE International Conference on Multimedia and Expo, 2018, 1- 6. |
| 2 |
CHAKARESKI J, NAQVI S, MASTRONARDE N, et al An energy efficient framework for UAV-assisted millimeter wave 5G heterogeneous cellular networks. IEEE Trans. on Green Communications and Networking, 2019, 3 (1): 37- 44.
doi: 10.1109/TGCN.2019.2892141 |
| 3 | YAPP J, SEKER R, BABICEANU R UAV as a service: enabling on-demand access and on-the-fly re-tasking of multitenant UAVs using cloud services. Proc. of the IEEE/AIAA 35th Digital Avionics Systems Conference, 2016, 1- 8. |
| 4 | TAJDINI M M, GONZALEZ-VALDES B, MARTINEZ-LORENZO J A, et al Efficient 3D forward modeling of GPR scattering from rough ground. Proc. of the IEEE International Symposium on Antennas & Propagation & USNC/URSI National Radio Science Meeting, 2015, 1686- 1687. |
| 5 | STONE R H Areodynamic modeling of wing-propeller interaction for a tail-sitter unmanned air vehicle. Proc. of the Biennial International Powered Lift Conference and Exhibit, 2008, 45 (1): 198- 210. |
| 6 |
KIM D A trajectory tracking control law for a quadrotor with slung load. Automatic, 2019, 106, 384- 389.
doi: 10.1016/j.automatica.2019.04.030 |
| 7 |
DAISUKE K, SHINJI S Tail-sitter vertical takeoff and landing unmanned aerial vehicle: transitional flight analysis. Journal of Aircraft, 2008, 45 (1): 292- 297.
doi: 10.2514/1.30122 |
| 8 | SAGHAFI F, BANAZADEH A Investigation on the flight characteristics of a conceptual fluidic thrust-vectored aerial tailsitter. Proceedings of the Institution of Mechanical Engineers Part G—Journal of Aerospace Endinering, 2007, 221 (G5): 741- 755. |
| 9 |
WANG X H, CHEN Z X, YUAN Z Z Modeling and control of an agile tail-sitter aircraft. Journal of the Franklin Institution Engineering and Applied Mathematics, 2015, 352 (12): 5437- 5472.
doi: 10.1016/j.jfranklin.2015.09.012 |
| 10 |
BLIODEAU P, WONG F Modeling and control of a hovering mini tail-sitter. International Journal of Micro Air Vehicles, 2010, 2 (4): 211- 220.
doi: 10.1260/1756-8293.2.4.211 |
| 11 |
LIU H, HOU X L, KIM J, et al Decoupled robust velocity control for uncertain quadrotors. Asian Journal of Control, 2015, 17 (1): 225- 233.
doi: 10.1002/asjc.873 |
| 12 |
LIU D Y, LIU H Robust attitude control for tail-sitter unmanned aerial vehicles in flight mode transitions. International Journal of Robust and Nonlinear Control, 2019, 29 (4): 1132- 1149.
doi: 10.1002/rnc.4428 |
| 13 |
LI Z Y, ZHOU W J, LIU H, et al Nonlinear robust flight mode transition control for tail-sitter aircraft. IEEE Access, 2018, 6, 65909- 65921.
doi: 10.1109/ACCESS.2018.2878722 |
| 14 | LIU D Y, LIU H, LI Z Y Robust trajectory tracking control for tail-sitter UAVs. Proc. of the Chinese Control Conference, 2018, 2538- 2542. |
| 15 |
LIU H, PENG F C, LEWIS F L, et al Robust tracking control for tail-sitters in flight mode transitions. IEEE Trans. on Aerospace and Electronic Systems, 2019, 55 (4): 2023- 2035.
doi: 10.1109/TAES.2018.2880888 |
| 16 |
AHMED T H, SIDNEY N G, SHAHRAM Y Unmanned aerial vehicles formation using learning based model predictive controll. Asian Journal of Control, 2018, 20 (3): 1014- 1026.
doi: 10.1002/asjc.1774 |
| 17 | THU K Designing and modeling of quadcopter control system using L1 adaptive control . Proc. of the International Symposium on Intelligent Systems, 2017, 103, 528- 535. |
| 18 |
ZUO Z Y, RU P K Augmented L1 adaptive tracking control of quad-rotor unmanned aircrafts . IEEE Trans. on Aerospace and Electronic Systems, 2014, 50 (4): 3090- 3101.
doi: 10.1109/TAES.2014.120705 |
| 19 |
XU D, WHIDBORNE J F, COOKE A K Fault tolerant control of a quadrotor using L1 adaptive control . International Journal of Intelligent Unmanned Systems, 2016, 4 (1): 43- 66.
doi: 10.1108/IJIUS-08-2015-0011 |
| 20 |
LI M, ZUO Z Y, LIU H Adaptive fault tolerant control for trajectory tracking of a quadrotor helicopter. Transactions of the Institute of Measurement and Control, 2018, 40 (12): 3560- 3569.
doi: 10.1177/0142331217728568 |
| 21 |
MO H, FARID G Nonlinear and adaptive intelligent control techniques for quadrotor UAV—a survey. Asian Journal of Control, 2019, 21 (2): 989- 1008.
doi: 10.1002/asjc.1758 |
| 22 |
HUA B, CHEN L, WU Y H, et al A study of PID and L1 adaptive control for automatic balancing of spacecraft three-axis simulator. International Journal of Intelligent Computing and Cybernetics, 2018, 11 (2): 269- 284.
doi: 10.1108/IJICC-07-2017-0084 |
| 23 |
TAN J, FAN Y H, YAN P P, et al Sliding mode fault tolerant control for unmanned aerial vehicle with sensor and actuator faults. Sensors, 2019, 19 (3): 643.
doi: 10.3390/s19030643 |
| 24 |
BENEDETTI M, DURSO F, FORTINO G A fault-tolerant self-organizing flocking approach for UAV aerial survey. Journal of Network and Computer Applications, 2017, 96, 14- 30.
doi: 10.1016/j.jnca.2017.08.004 |
| 25 | HOVAKIMYAN N, CAO C Y L1 adaptive control theory . Philadelphia: Society for Industrial and Applied Mathematics, 2010. |
| 26 |
LI Z Y, ZHANG L X, LIU H Nonlinear robust control of tail-sitter aircrafts in flight mode transitions. Aerospace Science and Technology, 2018, 81, 348- 361.
doi: 10.1016/j.ast.2018.08.021 |
| [1] | Yuechen HUANG, Haiyang LI, Hongxin SHEN. Optimal feedback based control for Mars entry trajectory tracking [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 134-141. |
| [2] | Zhang Yan, Qu Weidong, Xi Yugeng & Cai Zili. Stabilization and trajectory tracking of autonomous airship’s planar motion [J]. Journal of Systems Engineering and Electronics, 2008, 19(5): 974-981. |
| [3] | Tang Qiang, Zhang Xinguo' & Liu Xicheng. TF/TA2 trajectory tracking using nonlinear predictive control approach [J]. Journal of Systems Engineering and Electronics, 2006, 17(2): 396-401. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||