
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (2): 447-460.doi: 10.23919/JSEE.2022.000045
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Wenzhang LIU1( ), Lu DONG2(), Jian LIU1(), Changyin SUN1,*()
), Lu DONG2(), Jian LIU1(), Changyin SUN1,*()
Received:2021-08-13
Accepted:2022-03-07
Online:2022-05-06
Published:2022-05-06
Contact:
Changyin SUN
E-mail:wzliu@seu.edu.cn;ldong90@seu.edu.cn;bkliujian@163.com;cysun@seu.edu.cn
About author:Supported by:Wenzhang LIU, Lu DONG, Jian LIU, Changyin SUN. Knowledge transfer in multi-agent reinforcement learning with incremental number of agents[J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 447-460.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
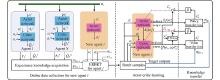
Fig 1
Algorithm framework of MADDPG-INA"
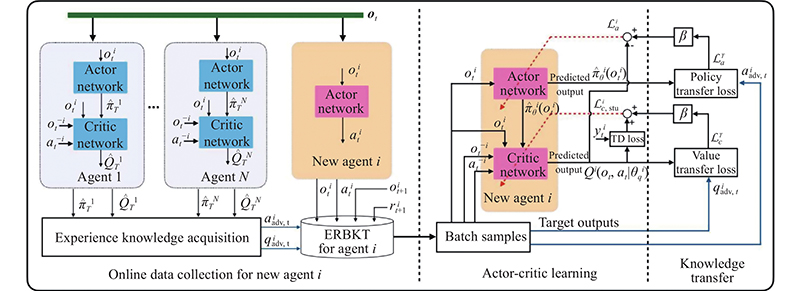
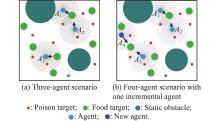
Fig 2
Simulation A: waterworld with multi-agent"
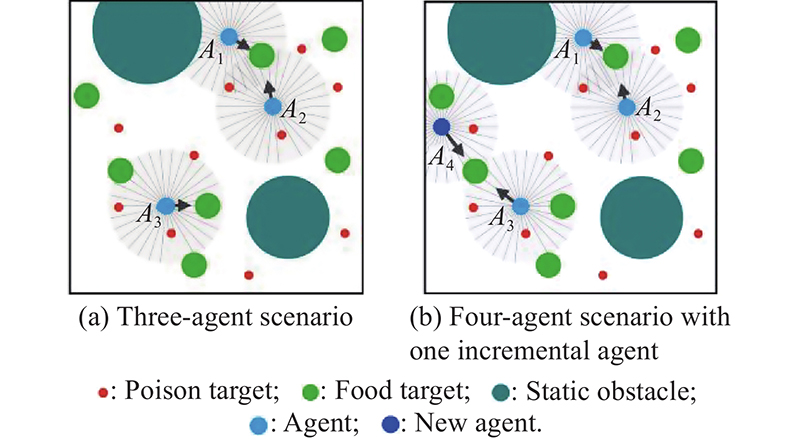
Table 1
Parameter settings"
| Parameter | Simulation A | Simulation B |
| Discount factor γ | 0.99 | 0.99 |
| Transfer factor β | 1.0 | 20.0 |
| Learning rate critic,αc | 0.001 | 0.001 |
| Learning rate critic,αa | 0.001 | 0.001 |
| Soft update factor τ | 0.001 | 0.001 |
| Batch size Nbatch | 64 | 64 |
| Replay buffer size M | 100000 | 100000 |
| Initialize exploration variance σ | 0.2 | 0.5 |
| Hidden layer units | [100, 50, 25] | [64, 64] |
| Episode number Ne | 15000 | 24000 |
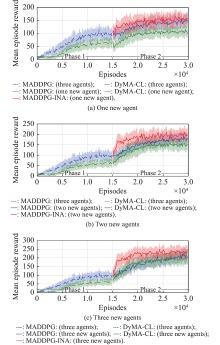
Fig 3
Compared learning performance of the whole team for simulation A"
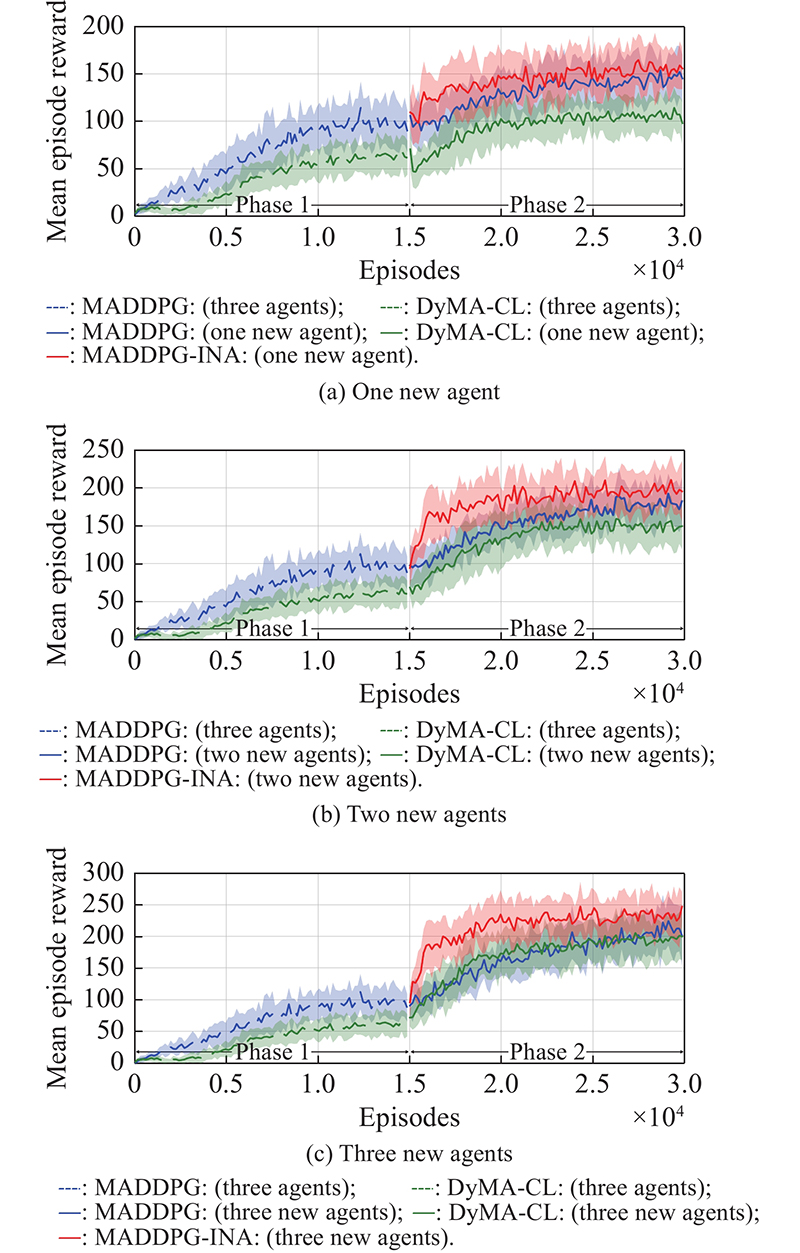
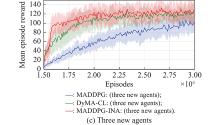
Fig 4
Learning performance of new agent(s) for simulation A"
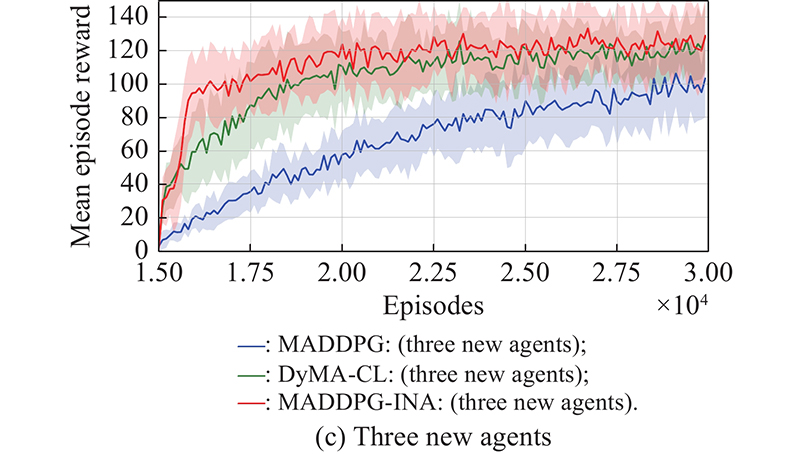
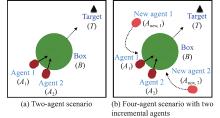
Fig 6
Simulation B: box-pushing"
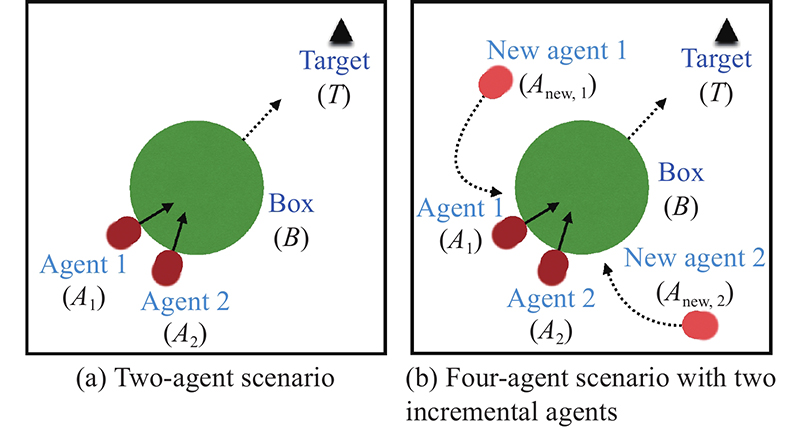

Fig 7
Compared learning performance for Simulation B"
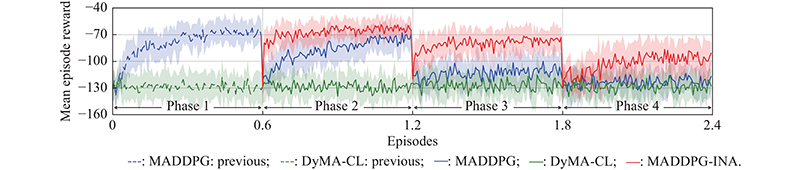
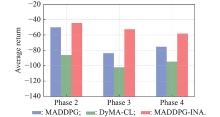
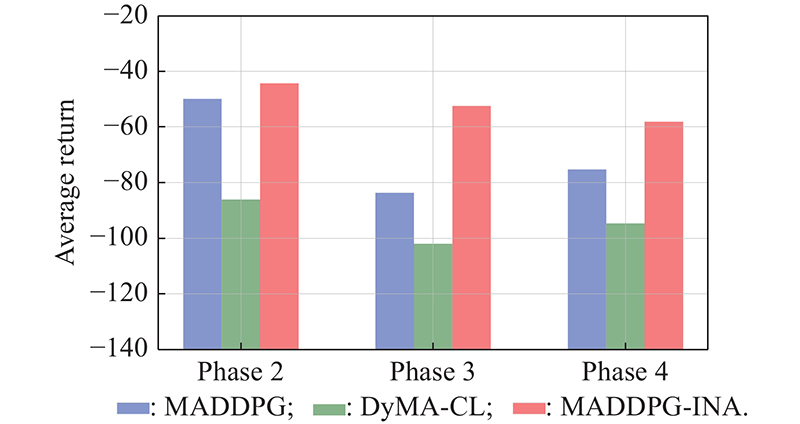
Fig 8
Average return of the models that get the best performance in Simulation B"
| 1 |
MNIH V, KAVUKCUOGLU K, SILVER D, et al Human-level control through deep reinforcement learning. Nature, 2015, 518 (7540): 529- 533.
doi: 10.1038/nature14236 |
| 2 | LILLICRAP T P, HUNT J J, PRITZEL A, et al. Continuous control with deep reinforcement learning. https://arxiv.org/abs/1509.02971. |
| 3 |
DONG L, YUAN X, SUN C Y Event-triggered receding horizon control via actor-critic design. Science China Information Sciences, 2020, 63 (5): 150210.
doi: 10.1007/s11432-019-2663-y |
| 4 | FUJIMOTO S, MEGER D, PRECUP D A deep reinforcement learning approach to marginalized importance sampling with the successor representation. Proc. of the 38th International Conference on Machine Learning, 2021, 3518- 3529. |
| 5 |
LI Y, QI X H, LI X D, et al Deep reinforcement learning and its application in autonomous fitting optimization for attack areas of UCAVs. Journal of Systems Engineering and Electronics, 2020, 31 (4): 734- 742.
doi: 10.23919/JSEE.2020.000048 |
| 6 |
GAO X, FANG Y W, WU Y L Fuzzy Q learning algorithm for dual-aircraft path planning to cooperatively detect targets by passive radars. Journal of Systems Engineering and Electronics, 2013, 24 (5): 800- 810.
doi: 10.1109/JSEE.2013.00093 |
| 7 |
FANG M, GROEN F C Collaborative multi-agent reinforcement learning based on experience propagation. Journal of Systems Engineering and Electronics, 2013, 24 (4): 683- 689.
doi: 10.1109/JSEE.2013.00079 |
| 8 |
TAMPUU A, MATIISEN T, KODELJA D, et al Multiagent cooperation and competition with deep reinforcement learning. PloS One, 2017, 12 (4): e0172395.
doi: 10.1371/journal.pone.0172395 |
| 9 |
NGUYEN T T, NGUYEN N D, NAHAVANDI S Deep reinforcement learning for multiagent systems: a review of challenges, solutions, and applications. IEEE Trans. on Cybernetics, 2020, 50 (9): 3826- 3839.
doi: 10.1109/TCYB.2020.2977374 |
| 10 | LOWE R, WU Y, TAMAR A, et al Multi-agent actor-critic for mixed cooperative-competitive environments. Proc. of the Annual Conference on Neural Information Processing Systems, 2017, 6379- 6390. |
| 11 | FOERSTER J, FARQUHAR G, AFOURAS T, et al Counterfactual multi-agent policy gradients. Proc. of the AAAI Conference on Artificial Intelligence, 2018, 2974- 2982. |
| 12 | SUNEHAG P, LEVER G, GRUSLYS A, et al Value-decomposition networks for cooperative multi-agent learning based on team reward. Proc. of the 17th International Conference on Autonomous Agents and MultiAgent Systems, 2018, 2085- 2087. |
| 13 | RASHID T, SAMVELYAN M, SCHRODER D W, et al Qmix: monotonic value function factorisation for deep multi-agent reinforcement learning. Proc. of the 35th International Conference on Machine Learning, 2018, 4292- 4301. |
| 14 |
PAN S J, YANG Q A survey on transfer learning. IEEE Trans. on Knowledge and Data Engineering, 2010, 22 (10): 1345- 1359.
doi: 10.1109/TKDE.2009.191 |
| 15 | LONG M S, ZHU H, WANG J M, et al Deep transfer learning with joint adaptation networks. Proc. of the 34th International Conference on Machine Learning, 2017, 2208- 2217. |
| 16 |
ZHUANG F Z, QI Z Y, DUAN K Y, et al A comprehensive survey on transfer learning. Proceedings of the IEEE, 2021, 109 (1): 43- 76.
doi: 10.1109/JPROC.2020.3004555 |
| 17 | TAYLOR M E, STONE P Transfer learning for reinforcement learning domains: a survey. Journal of Machine Learning Research, 2009, 10 (7): 1633- 1685. |
| 18 | LAZARIC A Transfer in reinforcement learning: a framework and a survey. Proc. of the Reinforcement Learning, 2012, 143- 173. |
| 19 | ZHU Z D, LIN K X, ZHOU J Y. Transfer learning in deep reinforcement learning: a survey. https://arxiv.org/abs/2009.07888. |
| 20 | TAYLOR M E, STONE P Behavior transfer for value-function-based reinforcement learning. Proc. of the 4th International Joint Conference on Autonomous Agents and Multiagent Systems, 2005, 53- 59. |
| 21 | BOUTSIOUKIS G, PARTALAS I, VLAHAVAS I Transfer learning in multi-agent reinforcement learning domains. Proc. of the European Workshop on Reinforcement Learning, 2011, 249- 260. |
| 22 |
SILVA F L D, COSTA A H R A survey on transfer learning for multiagent reinforcement learning systems. Journal of Artificial Intelligence Research, 2019, 64, 645- 703.
doi: 10.1613/jair.1.11396 |
| 23 | SILVA F L D, WARNELL G, COSTA A H R, et al Agents teaching agents: a survey on inter-agent transfer learning. Proc. of the 19th International Conference on Autonomous Agents and Multiagent Systems, 2020, 2165- 2167. |
| 24 | WADHWANIA S, KIM D K, OMIDSHAFIEI S, et al Policy distillation and value matching in multiagent reinforcement learning. Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2019, 8193- 8200. |
| 25 | YANG T P, WANG W X, TANG H Y, et al. Transfer among agents: an efficient multiagent transfer learning framework. https://arxiv.org/abs/2002.08030. |
| 26 | RUSU A A, COLMENAREJO S G, GULCEHRE C, et al. Policy distillation. http://arxiv.org/abs/1511.06295. |
| 27 | PARISOTTO E, BA J L, SALAKHUTDINOV R. Actor-mimic: deep multitask and transfer reinforcement learning. http://arxiv.org/abs/1511.06342. |
| 28 | OMIDSHAFIEI S, PAZIS J, AMATO C, et al Deep decentralized multi-task multi-agent reinforcement learning under partial observability. Proc. of the 34th International Conference on Machine Learning, 2017, 2681- 2690. |
| 29 |
LI Z, BARENJI A V, JIANG J Z, et al A mechanism for scheduling multi robot intelligent warehouse system face with dynamic demand. Journal of Intelligent Manufacturing, 2020, 31 (2): 469- 480.
doi: 10.1007/s10845-018-1459-y |
| 30 | WANG W X, YANG T P, LIU Y, et al From few to more: large-scale dynamic multiagent curriculum learning. Proc. of the AAAI Conference on Artificial Intelligence, 2020, 7293- 7300. |
| 31 | CHEN D, LI Z J, WANG Y Q, et al. Deep multi-agent reinforcement learning for highway on-ramp merging in mixed traffic. https://arxiv.org/abs/2105.05701. |
| 32 | CZARNECKI W M, PASCANU R, OSINDERO S, et al Distilling policy distillation. Proc. of the 22th International Conference on Artificial Intelligence and Statistics, 2019, 1331- 1340. |
| 33 | CHEN G A new framework for multi-agent reinforcement learning−centralized training and exploration with decentralized execution via policy distillation. Proc. of the 19th International Conference on Autonomous Agents and Multiagent Systems, 2020, 1801- 1803. |
| 34 | TAYLOR A, DUSPARIC I, GUÉRIAU M, et al. Parallel transfer learning in multi-agent systems: what, when and how to transfer. Proc. of the International Joint Conference on Neural Networks, 2019. DOI: 10.1109/IJCNN.2019.8851784. |
| 35 | AGARWAL A, KUMAR S, SYCARA K P, et al Learning transferable cooperative behavior in multi-agent teams. Proc. of the 19th International Conference on Autonomous Agents and Multiagent Systems, 2020, 1741- 1743. |
| 36 | SUTTON R S, BARTO A G. Reinforcement learning: an introduction. Cambridge: The MIT Press, 2018. |
| 37 | BELLMAN R, KALABA RE. Dynamic programming and modern control theory. New York: Academic Press, 1965. |
| 38 | ZHAO P L, HOI S C OTL: a framework of online transfer learning. Proc. of the 27th International Conference on Machine Learning, 2010, 1231- 1238. |
| 39 | LI Y Y, ZHOU W, WANG H M, et al. Improving fast adaptation for newcomers in multi-robot reinforcement learning system. Proc. of the IEEE Smart World, Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation, 2019: 753-760. |
| 40 | GUPTA J K, EGOROV M, KOCHENDERFER M Cooperative multi-agent control using deep reinforcement learning. Proc. of the International Conference on Autonomous Agents and Multiagent Systems, 2017, 66- 83. |
| 41 | NAIR V, HINTON G E Rectified linear units improve restricted boltzmann machines. Proc. of the 27th International Conference on Machine Learning, 2010, 807- 814. |
| [1] | Weiwei WU, Qian MA, Yexin LIU, Yongjun KIM. A model for knowledge transfer in a multi-agent organization based on lattice kinetic model [J]. Journal of Systems Engineering and Electronics, 2020, 31(1): 156-167. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||