
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (5): 1252-1266.doi: 10.23919/JSEE.2023.000131
• Systems Engineering • Previous Articles Next Articles
Li PAN1,2( ), Zhonghong WU1(), Minggang YU3,*(), Jintao LIU3(), Dan MEI4()
), Zhonghong WU1(), Minggang YU3,*(), Jintao LIU3(), Dan MEI4()
Received:2021-08-08
Online:2023-10-18
Published:2023-10-30
Contact:
Minggang YU
E-mail:329674406@qq.com;yizhousan@163.com;yuminggang8989@163.com;jintao_liu_2020@126.com;meidan_plan@126.com
About author:Supported by:Li PAN, Zhonghong WU, Minggang YU, Jintao LIU, Dan MEI. Strategy dominance mechanism of autonomous collaboration in unmanned swarm within the framework of public goods game[J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1252-1266.

Fig 1
Analytical framework for autonomous collaborative behaviour in unmanned swarms"
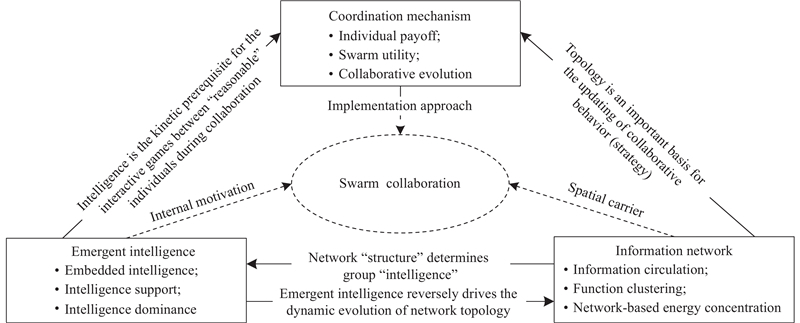
Table 1
Relationship between the concepts of the unmanned swarm and the multiplayer public goods game"
| Autonomous collaboration of unmanned swarm | Multi-player public goods evolutionary game |
| Unmanned swarm | Mixed homogeneous population |
| Public resources required by autonomous collaboration (ammunition, communication, etc.) | Public goods |
| Multiple unmanned platforms involving in autonomous collaboration | Multi-player |
| Individual unmanned platforms | Individuals |
| Individual unmanned platforms as research objects | Focal individual |
| Cooperative behavior where platforms are willing to contribute resources to the swarm | Strategy A |
| Non-cooperative behavior where platforms prefer “free-riding” rather than contributing resources to the swarm | Strategy B |
| Public resources the swarm gives back to platforms under different strategies | Pay-off |
| Payoff-based strategy transition between unmanned platforms | Game |
| Dynamic variations in the proportion of platforms that take different strategies in multiple rounds of game | Evolutionary |
| After multiple rounds, the game is terminated after the proportion of platforms stabilizes | Evolutionary stable state |
| Expected proportion of cooperators (non-cooperators) in the swarm in the evolutionary stable state | Average abundance |
| Average abundance of cooperators in the swarm is larger than 0.5 | Strategy A dominates |
Fig 2
Effects of different factors on average abundance"
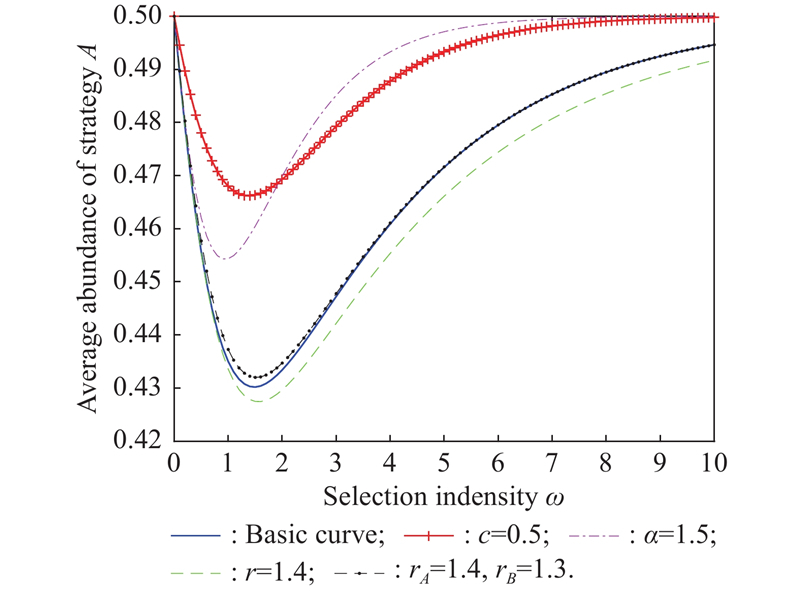
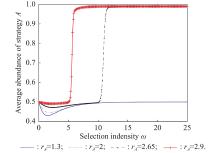
Fig 3
Effects of different ${{\boldsymbol{r}}_{\boldsymbol{A}}}$ on average abundance "
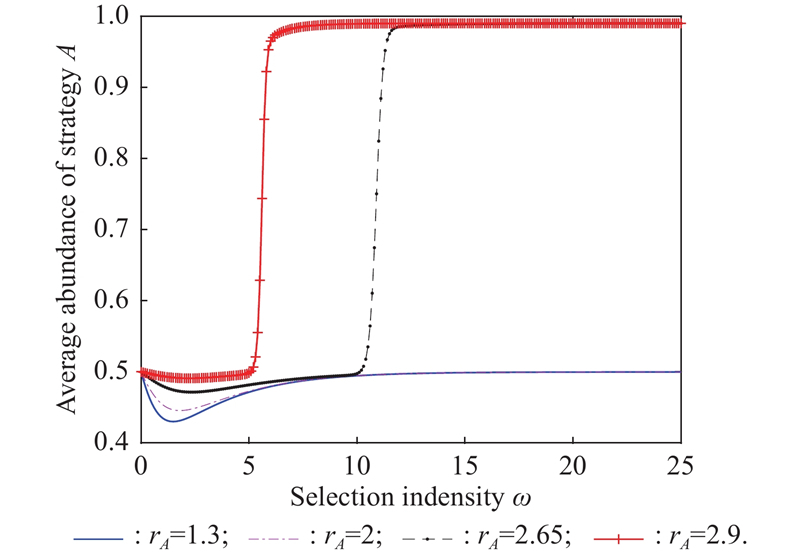
Fig 4
Effects of unit variation in parameters on average abundance"
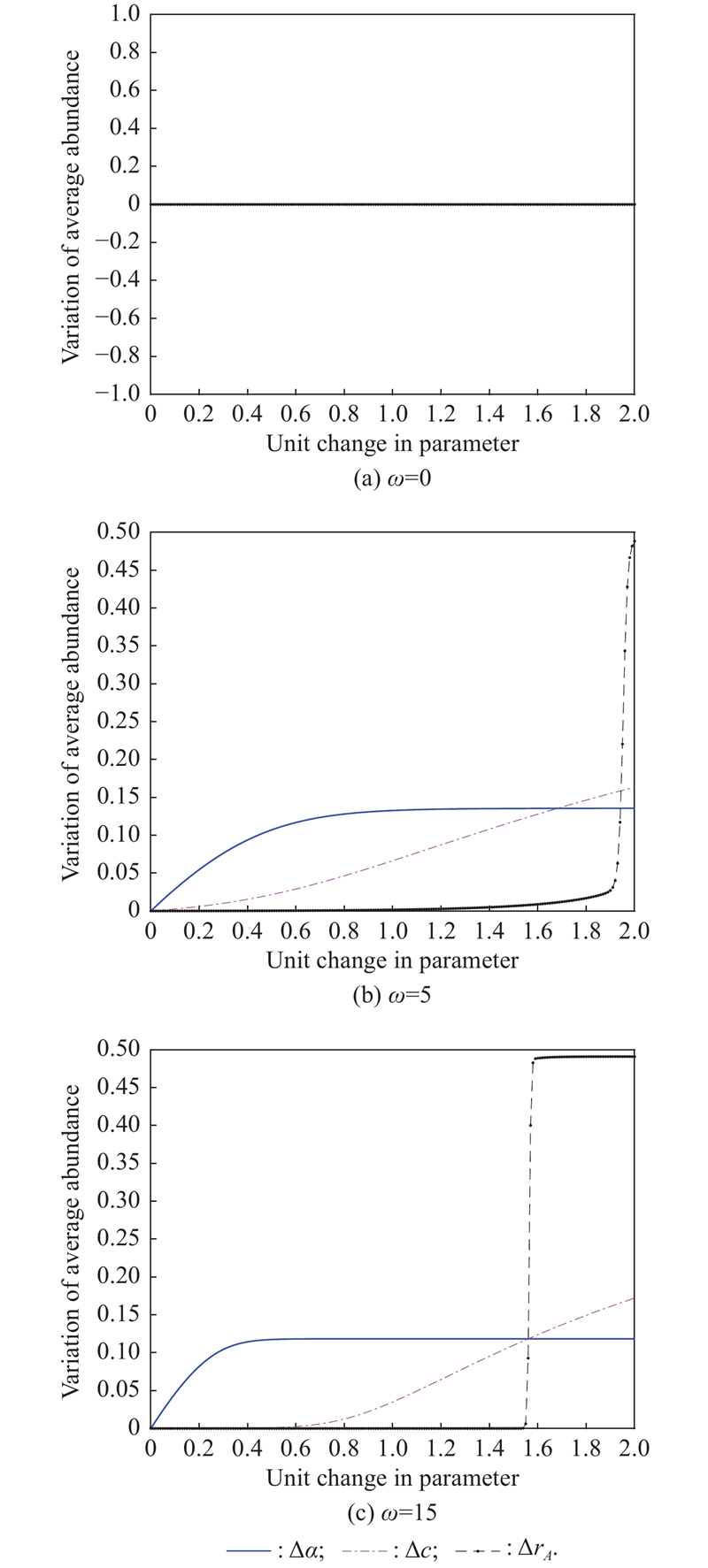
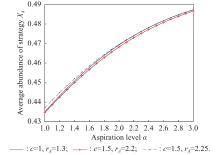
Fig 5
Effect of increase in cost and multiplication factor on average abundance"
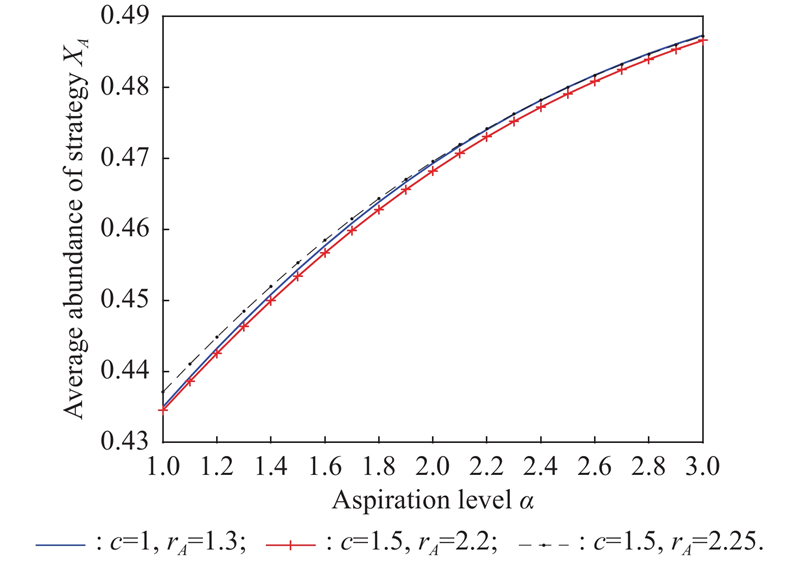
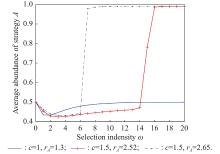
Fig 6
Stragy alternation by increasing cost and multiplication factor"
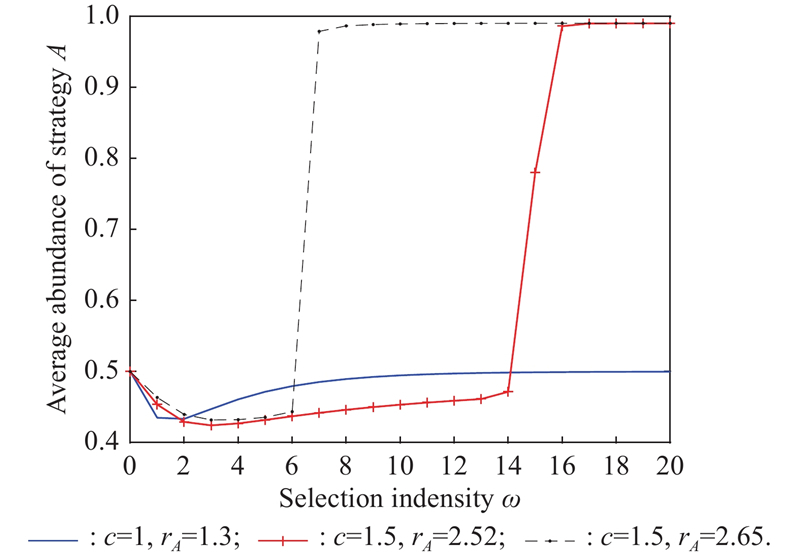
Table 2
Payoff for the linear PPG model"
| Strategy | Number of cooperators | |||||
| d−1 | ··· | k−1 | ··· | 1 | 0 | |
| A | rc−c | ··· | [r(kc+c)/d]−c | ··· | [2rc/d]−c | [rc/d]−c |
| B | r(d−1)c/2 | ··· | rkc/d | ··· | rc/d | 0 |
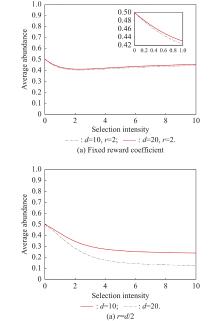
Fig 7
Relationship between ${{\boldsymbol{X}}_{\boldsymbol{A}}}$ and selection intensity and reward coefficient for the linear PGGs model "
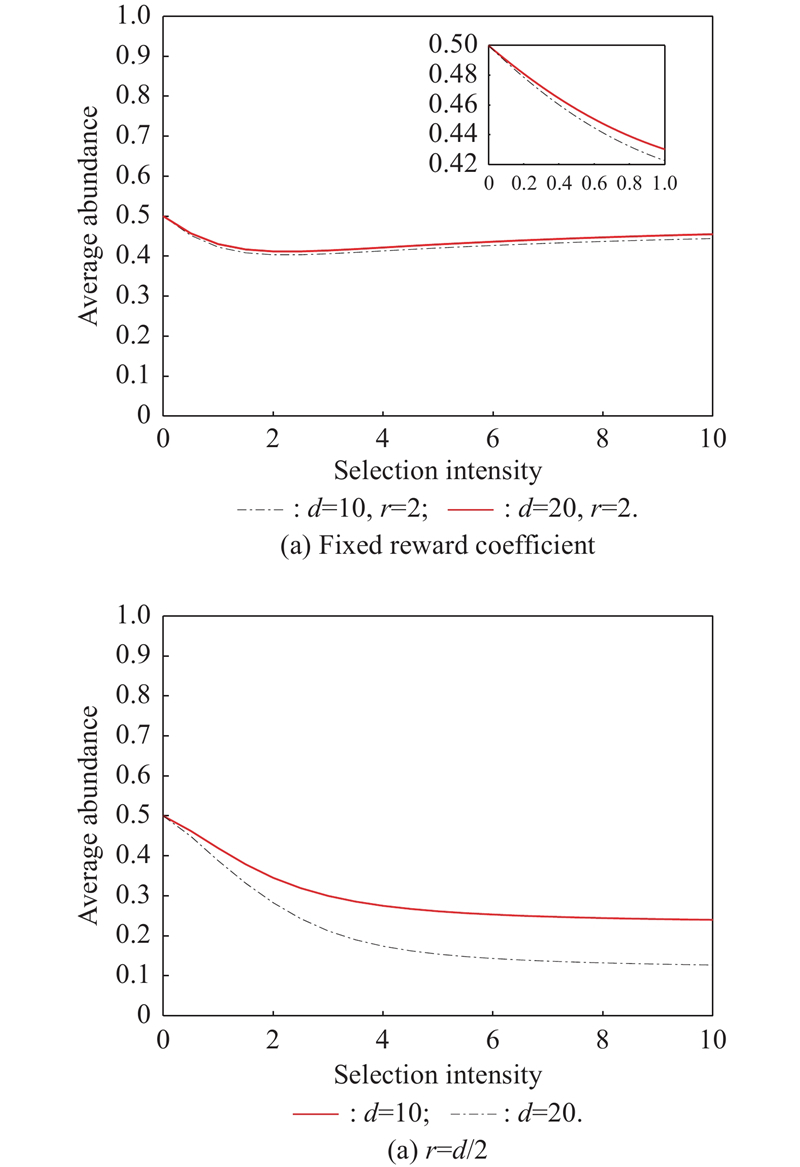
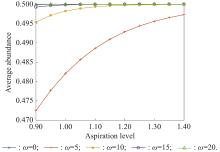
Fig 8
Relationship between the average abundance and aspiration level"
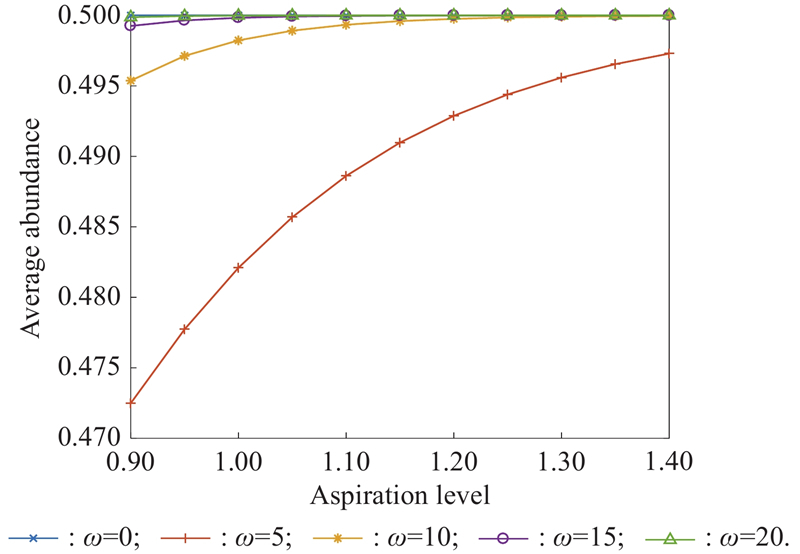
Table 3
Payoff for the threshold PPG model"
| Strategy | Number of cooperators | ||||||
| d−1 | ··· | k | ··· | m−1 | ··· | 0 | |
| A | rc | ··· | [r(kc+c)/d]−c | ··· | mrc/d | ··· | 0 |
| B | [r(d−1)c/d]+c | ··· | [rkc/d]+c | ··· | 0 | ··· | 0 |

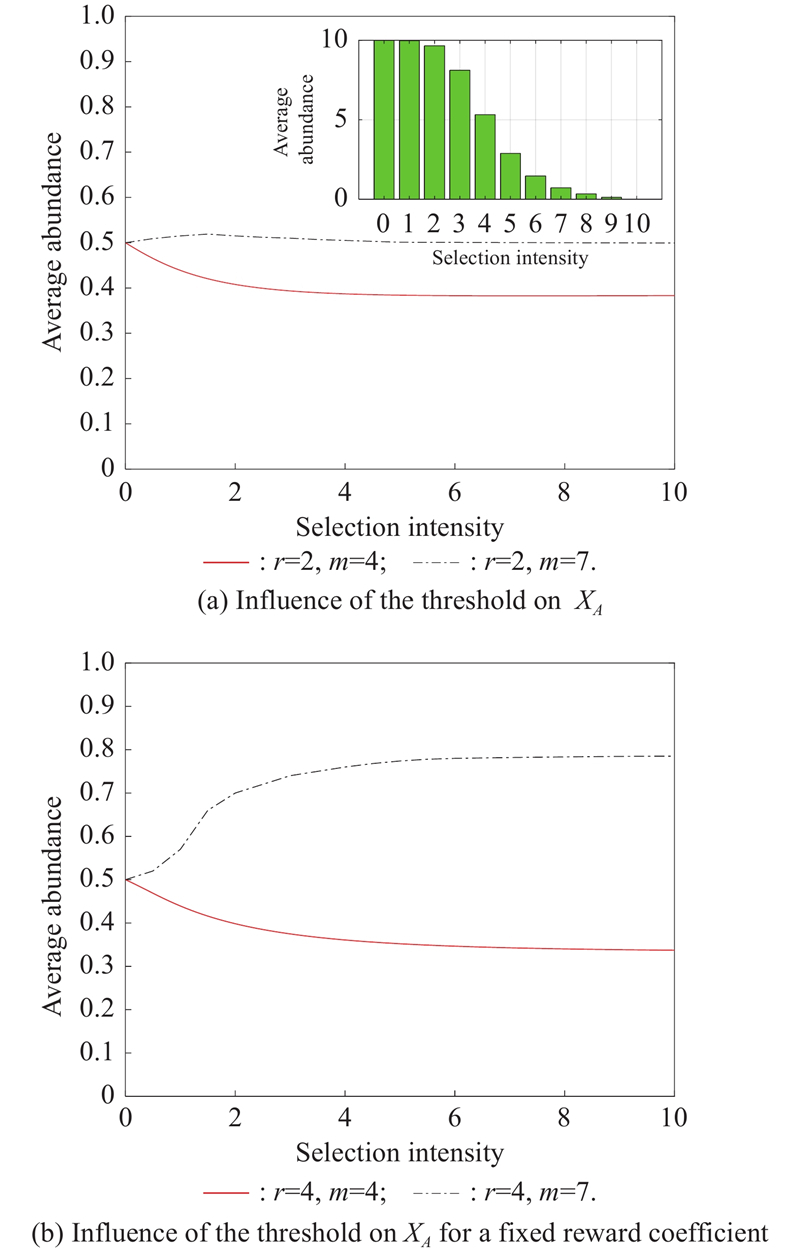
Fig 9
Effect of the threshold and reward coefficient on ${{\boldsymbol{X}}_{\boldsymbol{A}}}$ within the threshold PPG model "
| 1 |
XU P, DHERBOMEZ G, HERY E, et al System architecture of a driverless electric car in the grand cooperative driving challenge. IEEE Intelligent Transportation Systems Magazine, 2018, 10 (1): 47- 59.
doi: 10.1109/MITS.2017.2776135 |
| 2 | LIANG H, QIANG H, FENG Z. Research on capability characteristics modeling and cooperative fire strike planning for unmanned ground vehicles. Proc. of the 2nd International Conference on Artificial Intelligence and Big Data, 2019: 136−141. |
| 3 | ZOTO J, MUSIC M A, KHALIQ A, et al. Automatic path planning for unmanned ground vehicle using UAV imagery. Proc. of the International Conference on Robotics in Alpe-Adria Danube Region, 2019: 223−230. |
| 4 |
MA Y, HU M Q, YAN X P Multi-objective path planning for unmanned surface vehicle with currents effects. ISA Transactions, 2018, 75, 137- 156.
doi: 10.1016/j.isatra.2018.02.003 |
| 5 |
SONG R, LIU Y, BUCKNALL R Smoothed A* algorithm for practical unmanned surface vehicle path planning. Applied Ocean Research, 2019, 83, 9- 20.
doi: 10.1016/j.apor.2018.12.001 |
| 6 | ZHOU Q, LI B F, ZHAN Z J. Research on the key technologies of unmanned cluster to sea combat. Proc. of the Global Intelligence Industry Conference, 2018. DOI: 10.1117/12.2505303. |
| 7 |
GILES K, GIAMMARCO K A mission-based architecture for swarm unmanned systems. Systems Engineering, 2019, 22 (3): 271- 281.
doi: 10.1002/sys.21477 |
| 8 | KHAWAJA W, GUVENC I, MATOLAK DW, et al. A survey of air-to-ground propagation channel modeling for unmanned aerial vehicles. IEEE Communications Surveys & Tutorials, 2019, 21(3): 2361−2391. |
| 9 | SHAKERI R, AIGARADI M A, BADAWY A, et al Design challenges of multi-UAV systems in cyber-physical applications: a comprehensive survey, and future directions. IEEE Communications Surveys & Tutorials, 2018, 21 (4): 3340- 3385. |
| 10 | DOLIVCANIN E, FETAHOVIC I, TUBA E, et al Unmanned combat aerial vehicle path planning by brain storm optimization algorithm. Studies in Informatics and Control, 2018, 27 (1): 15- 24. |
| 11 | FAN J R, LI D G, LI R P, et al Analysis on MAV/UAV cooperative combat based on complex network. Defense Technology, 2020, 16 (1): 154- 161. |
| 12 | QUAN J, CHU Y Q, WANG X J Public goods with punishment and the evolution of cooperation. Systems Engineering—Theory & Practice, 2019, 39 (1): 141- 149. |
| 13 |
SMITH J M, PRICE G R The logic of animal conflict. Nature, 1973, 246 (5427): 15- 18.
doi: 10.1038/246015a0 |
| 14 | NOWAK M A, SIGMUND K Evolution of indirect reciprocity. Nature, 2005, 437 (6685): 1291- 1298. |
| 15 | WOLFF I. What are the equilibria in public-good experiments? Economics Letters, 2017, 150: 83−85. |
| 16 |
NOWAK M A, SASAKI A, TAYLOR C, et al Emergence of cooperation and evolutionary stability in finite populations. Nature, 2004, 428 (6983): 646- 652.
doi: 10.1038/nature02414 |
| 17 |
SU Q, MCAVOY A, WANG L, et al Evolutionary dynamics with stochastic game transitions. Proceedings of the National Academy of Sciences, 2019, 116 (51): 25398- 25404.
doi: 10.1073/pnas.1908936116 |
| 18 |
ANTAL T, NOWAK M A, TRAULSEN A Strategy abundance in 2×2 games for arbitrary mutation rates. Journal of Theoretical Biology, 2009, 257 (2): 340- 344.
doi: 10.1016/j.jtbi.2008.11.023 |
| 19 |
GOKHALE C S, TRAULSEN A Evolutionary games in the multiverse. Proceedings of the National Academy of Sciences, 2010, 107 (12): 5500- 5504.
doi: 10.1073/pnas.0912214107 |
| 20 |
HINDERSIN L, WU B, TRAULSEN A, et al Computation and simulation of evolutionary game dynamics in finite populations. Scientific Reports, 2019, 9 (1): 6946.
doi: 10.1038/s41598-019-43102-z |
| 21 | WANG X J, GU C L, LYU S J, et al Evolutionary game dynamics of combining the Moran and imitation processes. Chinese Physics B, 2019, 28 (2): 94- 105. |
| 22 |
ROCA C P, HELBING D Emergence of social cohesion in a model society of greedy, mobile individuals. Proceedings of the National Academy of Sciences, 2011, 108 (28): 11370- 11374.
doi: 10.1073/pnas.1101044108 |
| 23 |
TARNITA C E, OHTSUKI H, ANTAL T, et al Strategy selection in structured populations. Journal of Theoretical Biology, 2009, 259 (3): 570- 581.
doi: 10.1016/j.jtbi.2009.03.035 |
| 24 |
DU J M, WU B, WANG L Aspiration dynamics in structured population acts as if in a well-mixed one. Scientific Reports, 2015, 5, 8014.
doi: 10.1038/srep08014 |
| 25 |
DU J M, WU B, ALTROCK P M, et al Aspiration dynamics of multi-player games in finite populations. Journal of the Royal Society Interface, 2014, 11 (94): 20140077.
doi: 10.1098/rsif.2014.0077 |
| 26 | DU J M, WU B, WANG L. Evolutionary game dynamics of multi-agent cooperation driven by self-learning. Proc. of the 9th Asian Control Conference, 2013. DOI: 10.1109/ASCC.2013.6606032. |
| 27 | WANG X J, XIA K Aspiration driven, evolutionary game and environmental pollution control. Jianghan Forum, 2018, 7, 38- 44. |
| 28 | DU J M, WU B, WANG L Aspiration dynamics and the sustainability of resources in the public goods dilemma. Physica A: Statistical Mechanics & its Application, 2016, 380 (16): 1432- 1436. |
| 29 | SMITH E A Communication and collective action: language and the evolution of human cooperation. Evolution & Human Behavior, 2010, 31 (4): 231- 245. |
| 30 | YU M G, HE M, ZHANG D G, et al. An approach to coordinated control of structured unmanned swarm based on evolutionary game. Proc. of the IEEE 3rd International Conference on Unmanned Systems, 2020. DOI: 10.1109/ICUS50048.2020.9275030. |
| 31 | YU M G, ZHANG D G, KANG K, et al. Cooperative evolution mechanism of unmanned swarm within the framework of public good game. Systems Engineering and Electronics: 2020, 42(12): 2787−2794. (in Chinese) |
| 32 | LIU J T, HE M, LUO L, et al Eigenvalue analysis of UAV cluster control system. Systems Engineering and Electronics, 2022, 44 (2): 612- 618. |
| 33 | LIU Q, HE M, LIU J T A mechanism for identifying and suppressing the emergent flocking behaviors of UAV swarms. Acta Electronica Sinica, 2019, 47 (2): 374- 381. |
| 34 | DoD. Unmanned systems integrated roadmap FY2017-2042. Washington DC: Office of the Secretary of Defense, 2013. |
| 35 | HU X F, RONG M Several important questions of intelligent warfare research. Journal of Command and Control, 2018, 4 (3): 195- 200. |
| 36 | LI L L, ZHANG C L, ZHUO Z M Development and key technology of intelligent unmanned combat system. Modern Defence Technology, 2020, 48 (3): 37- 44. |
| 37 | YANG J, SHEN W K Deep thinking on army intelligence construction. National Defense Science and Technology, 2019, 40 (4): 41- 44. |
| 38 | GARRO A, MAX M, TUNDIS A, et al Intelligent agents: multi-agent systems. Encyclopedia of Bioinformatics and Computational Biology, 2019, 1, 315- 320. |
| 39 | JOHN H. Hidden order-adaptability makes complexity. ZHOU X M. Trans. Shanghai: Shanghai Science and Technology Education Press, 2000. (in Chinese) |
| 40 |
YANG Z S, WANG W, KIM D On multi-path routing for reliable communications in failure interdependent complex networks. Journal of Combinatorial Optimization, 2021, 41 (1): 170- 196.
doi: 10.1007/s10878-020-00665-2 |
| 41 |
ZHONG C Y, YANG H, LIU Z X, et al Stability of replicator dynamics with bounded continuously distributed time delay. Mathematics, 2020, 8, 431.
doi: 10.3390/math8030431 |
| 42 |
GAO S P, WU T, WANG L Evolution of global cooperation and ethnocentrism in group-structured populations. Physics Letters A, 2018, 382 (31): 2027- 2043.
doi: 10.1016/j.physleta.2018.05.020 |
| 43 | GRAHAM R L, KUNTH D E, PATASHNIK O. Concrete mathematics. 2nd ed. Massachusetts: Addison-Wesley Publishing Company, 1994. |
| 44 |
CHEN Y S, YANG H X, GUO W Z Aspiration-induced dormancy promotes cooperation in the spatial Prisoner ’s dilemma games. Physical A: Statistical Mechanics and its Applications, 2017, 469, 625- 630.
doi: 10.1016/j.physa.2016.11.082 |
| 45 |
PLAKKOWSKI T Aspiration-based full cooperation in finite systems of players. Applied Mathematics and Computation, 2015, 251, 46- 54.
doi: 10.1016/j.amc.2014.11.054 |
| 46 | WANG X J, LIU J Stable coalition structures in cooperative game with externalities. Systems Engineering—Theory & Practice, 2018, 38 (5): 1173- 1183. |
| 47 |
LIU X S, HE M F, KANG Y B, et al Fixation of strategies with the Moran and Fermi processes in evolutionary games. Physica A: Statistical Mechanics and its Applications, 2017, 484, 336- 344.
doi: 10.1016/j.physa.2017.04.154 |
| 48 | LIU X S, HE M F, KANG Y B, et al Aspiration promotes cooperation in the prisoner’s dilemma game with the imitation rule. Physical Review E, 2016, 94 (1): 012124. |
| 49 | VAN K. Stochastic process in physics and chemistry. Netherlands: North-Holland, 1992. |
| 50 | GARDINER C W. Handbook of stochastic methods. Berlin: Springer, 1985. |
| 51 | KIMURA M. The neutral theory of molecular evolution. Cambridge: Cambridge University Press, 1983. |
| 52 |
TRAULSEN A, SEMMANN D, SOMMERFELD R D, et al Human strategy updating in evolutionary games. Proceedings of the National Academy of Sciences, 2010, 107 (7): 2962- 2966.
doi: 10.1073/pnas.0912515107 |
| 53 |
WU B, ALTROCK P M, WANG L, et al Universality of weak selection. Physical Review E, 2010, 82 (4): 046106.
doi: 10.1103/PhysRevE.82.046106 |
| 54 |
ALLEN B, LIPPNER G, NOWAK M A Evolutionary games on isothermal graphs. Nature Communications, 2019, 10, 5107.
doi: 10.1038/s41467-019-13006-7 |
| 55 |
TKADLEC J, PAVLOGIANNIS A, CHATTERJEE K, et al Population structure determines the tradeoff between fixation probability and fixation time. Communications Biology, 2019, 2 (1): 138.
doi: 10.1038/s42003-019-0373-y |
| [1] | Minggang YU, Yanjie NIU, Xueda LIU, Dongge ZHANG, Peng ZHENG, Ming HE, Ling LUO. Adaptive dynamic reconfiguration mechanism of unmanned swarm topology based on an evolutionary game [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 598-614. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||