
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (3): 780-792.doi: 10.23919/JSEE.2023.000134
• CONTROL THEORY AND APPLICATION • Previous Articles
Changwen DING1( ), Di ZHOU1,*(), Xinguang ZOU2(), Runle DU3(), Jiaqi LIU3()
), Di ZHOU1,*(), Xinguang ZOU2(), Runle DU3(), Jiaqi LIU3()
Received:2022-08-26
Online:2024-06-18
Published:2024-06-19
Contact:
Di ZHOU
E-mail:dcwhit@163.com;zhoud@hit.edu.cn;xgzou@hit.edu.cn;jenniferdu@126.com;ljq006@vip.sina.com
About author:Supported by:Changwen DING, Di ZHOU, Xinguang ZOU, Runle DU, Jiaqi LIU. Multiple model PHD filter for tracking sharply maneuvering targets using recursive RANSAC based adaptive birth estimation[J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 780-792.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
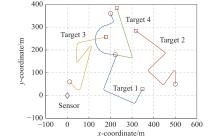
Fig 1
Trajectories of targets"
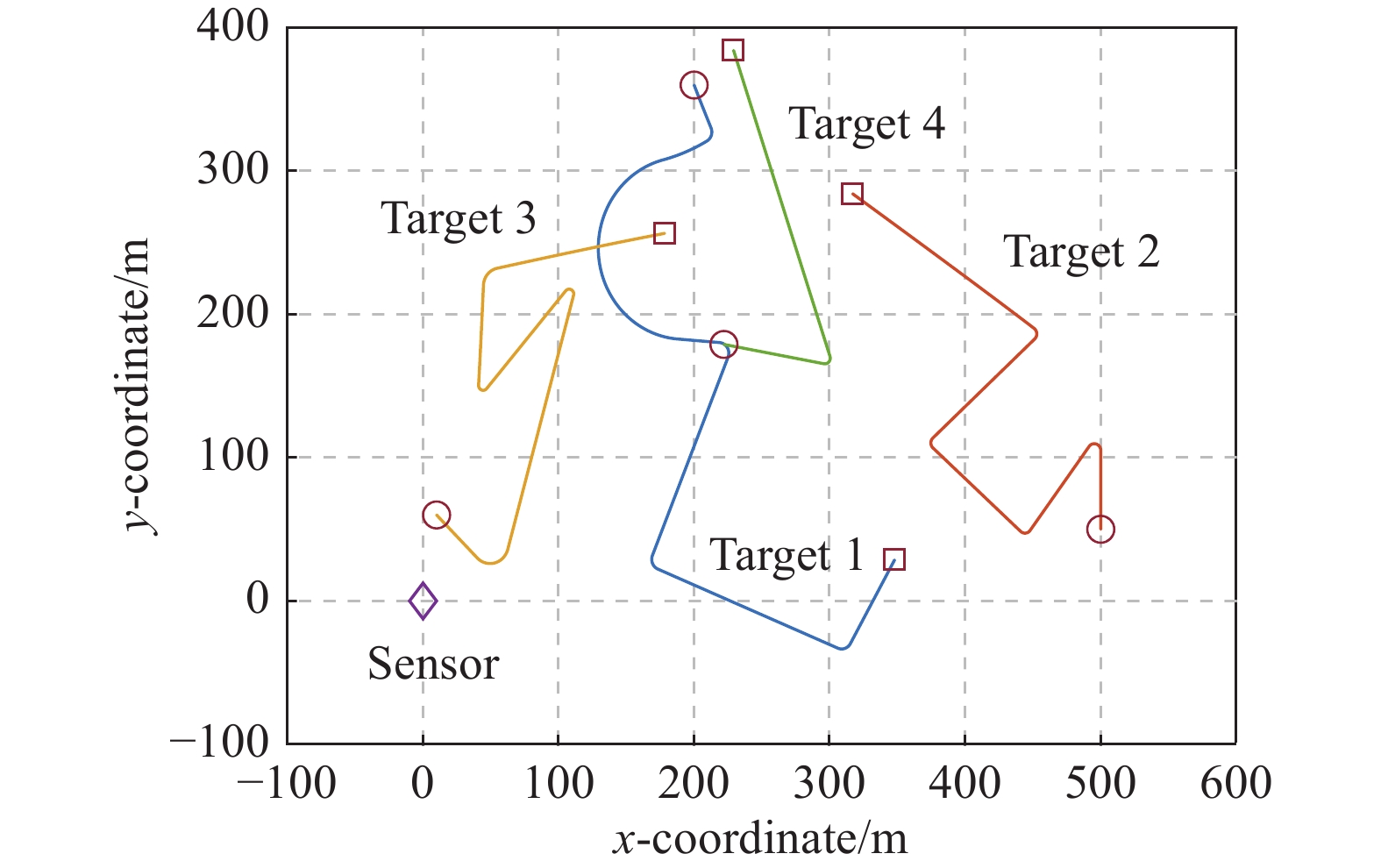
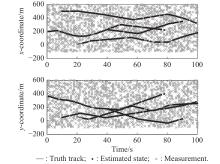
Fig 2
Target position estimates of WNTR-MMPHD filter"
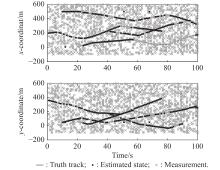
Fig 3
Target position estimates of CT-MMPHD filter"
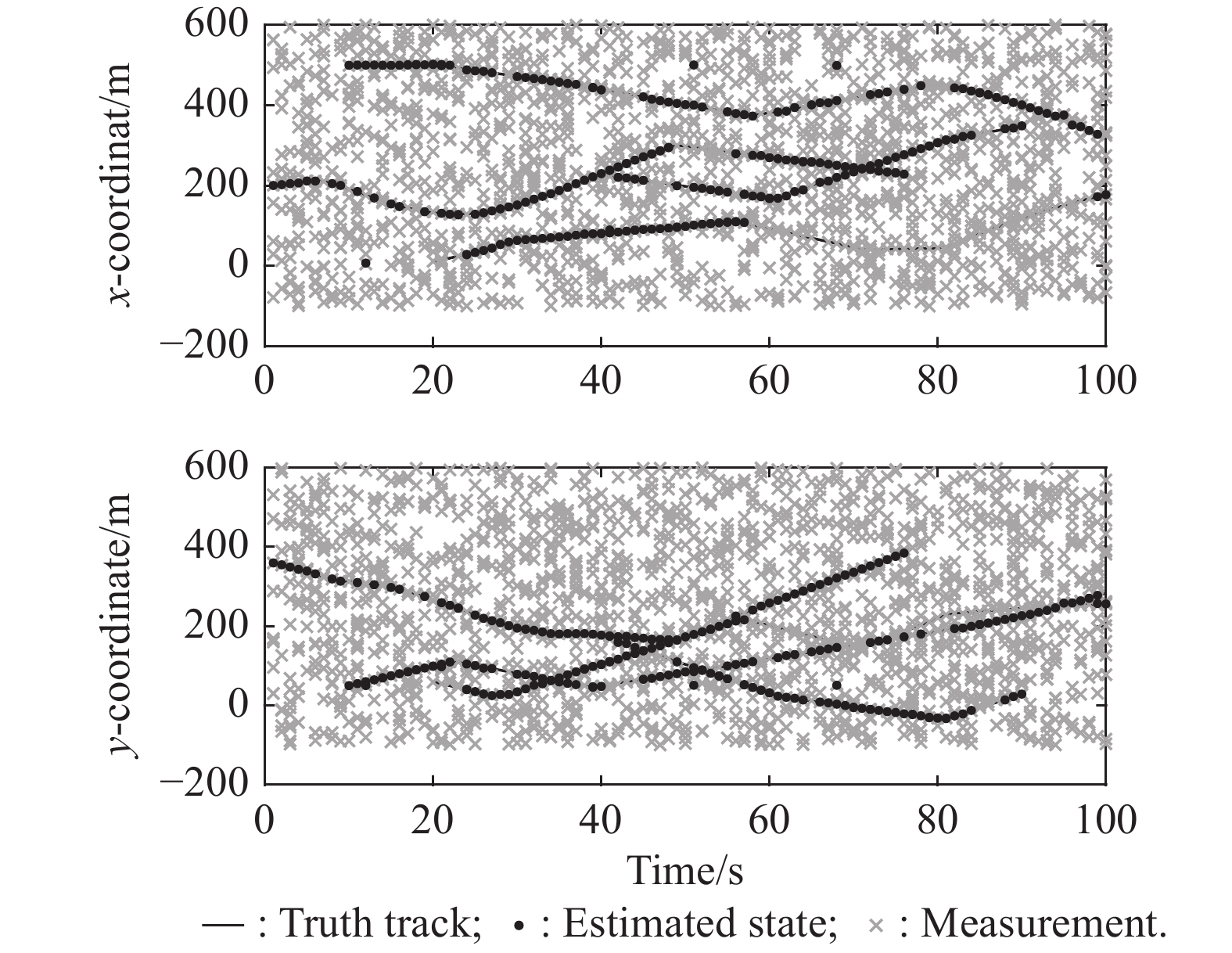
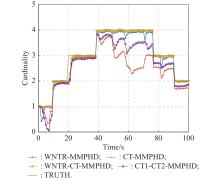
Fig 4
Cardinality estimates of four filters"
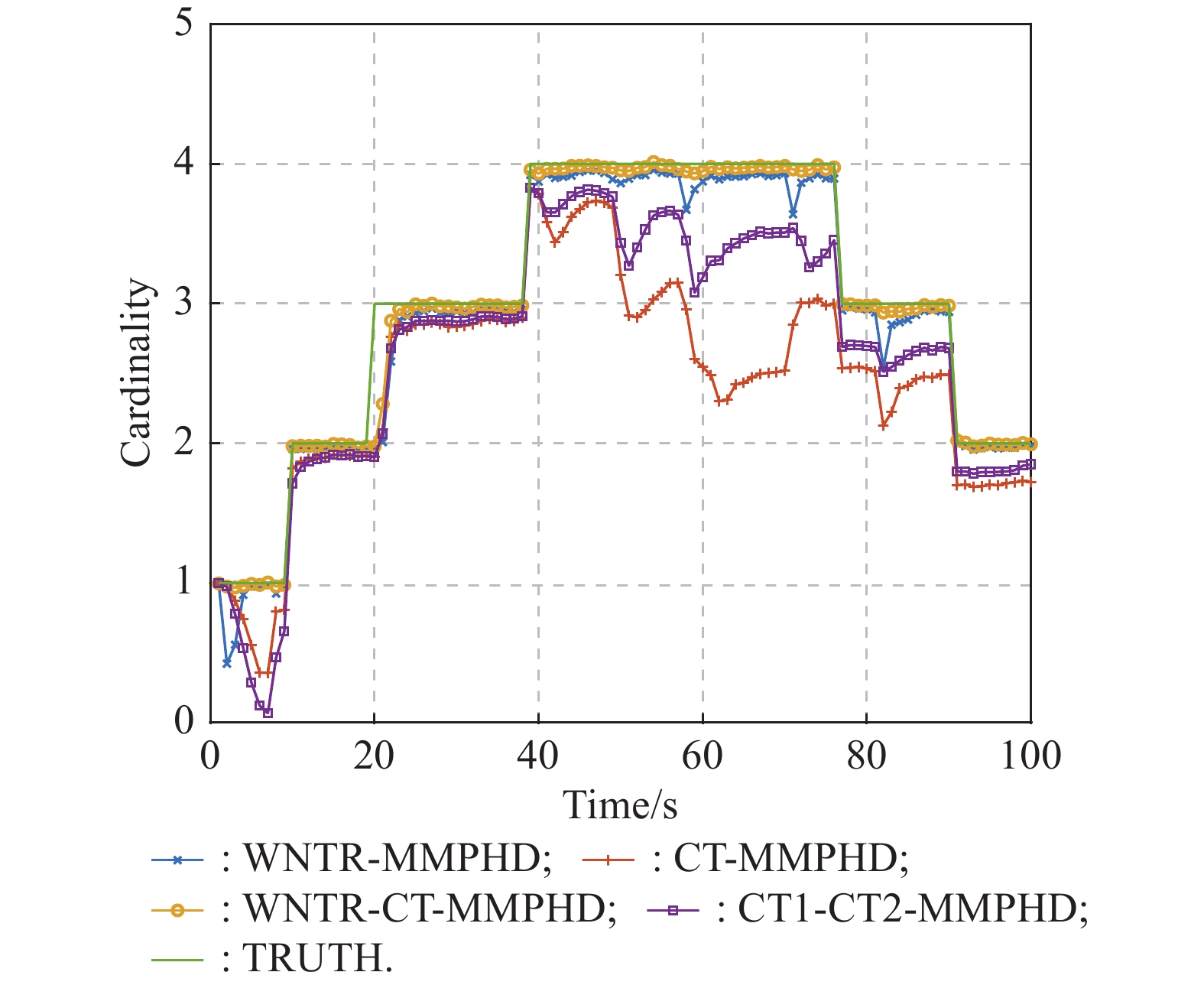
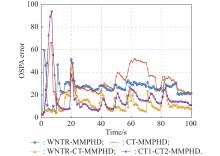
Fig 5
OSPA error of four filters"
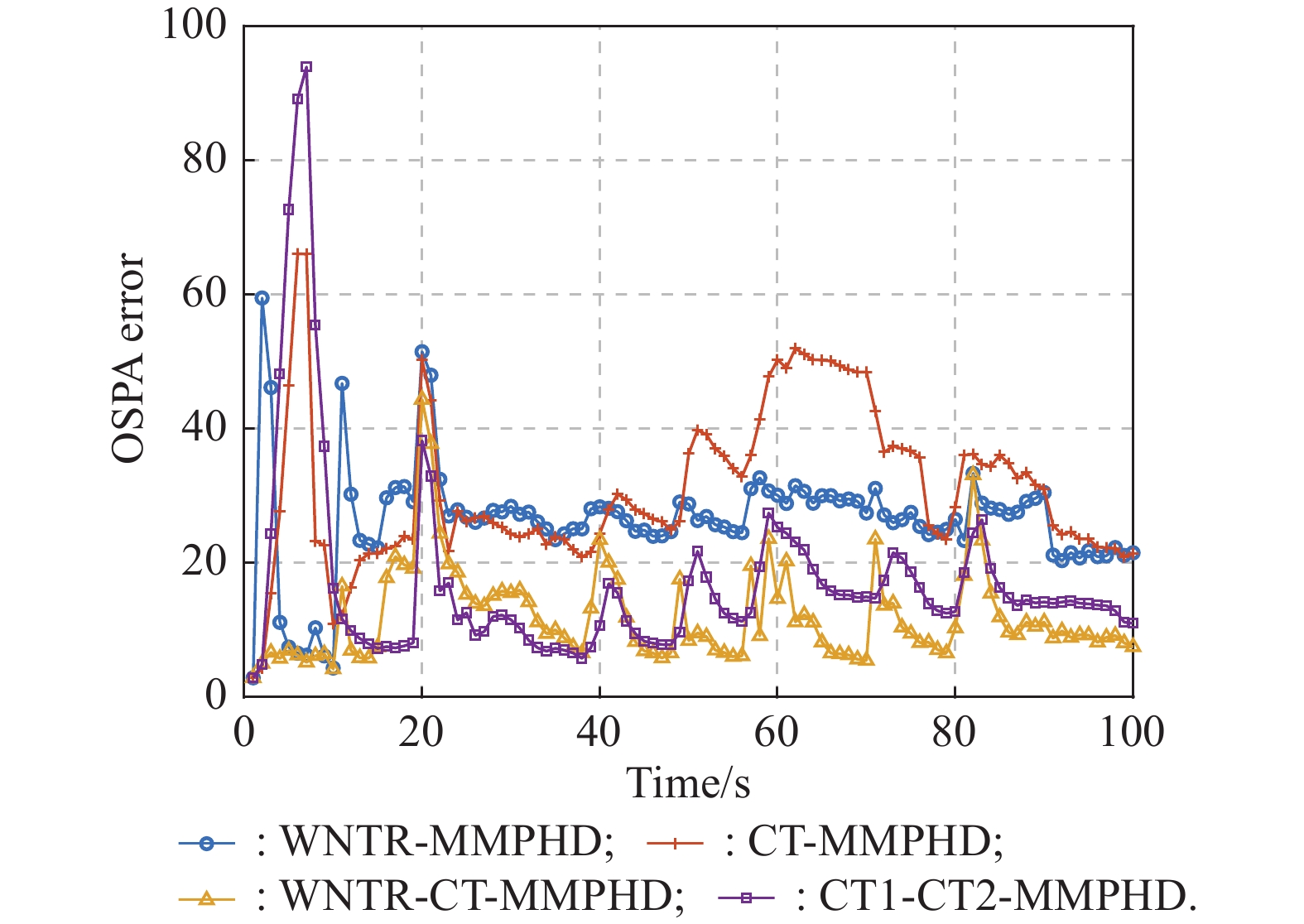
Fig 6
Target position estimates of WNTR-MMPHD-ABI filter"
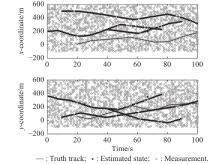
Fig 7
Target position estimates of original WNTR-MMPHD filter"
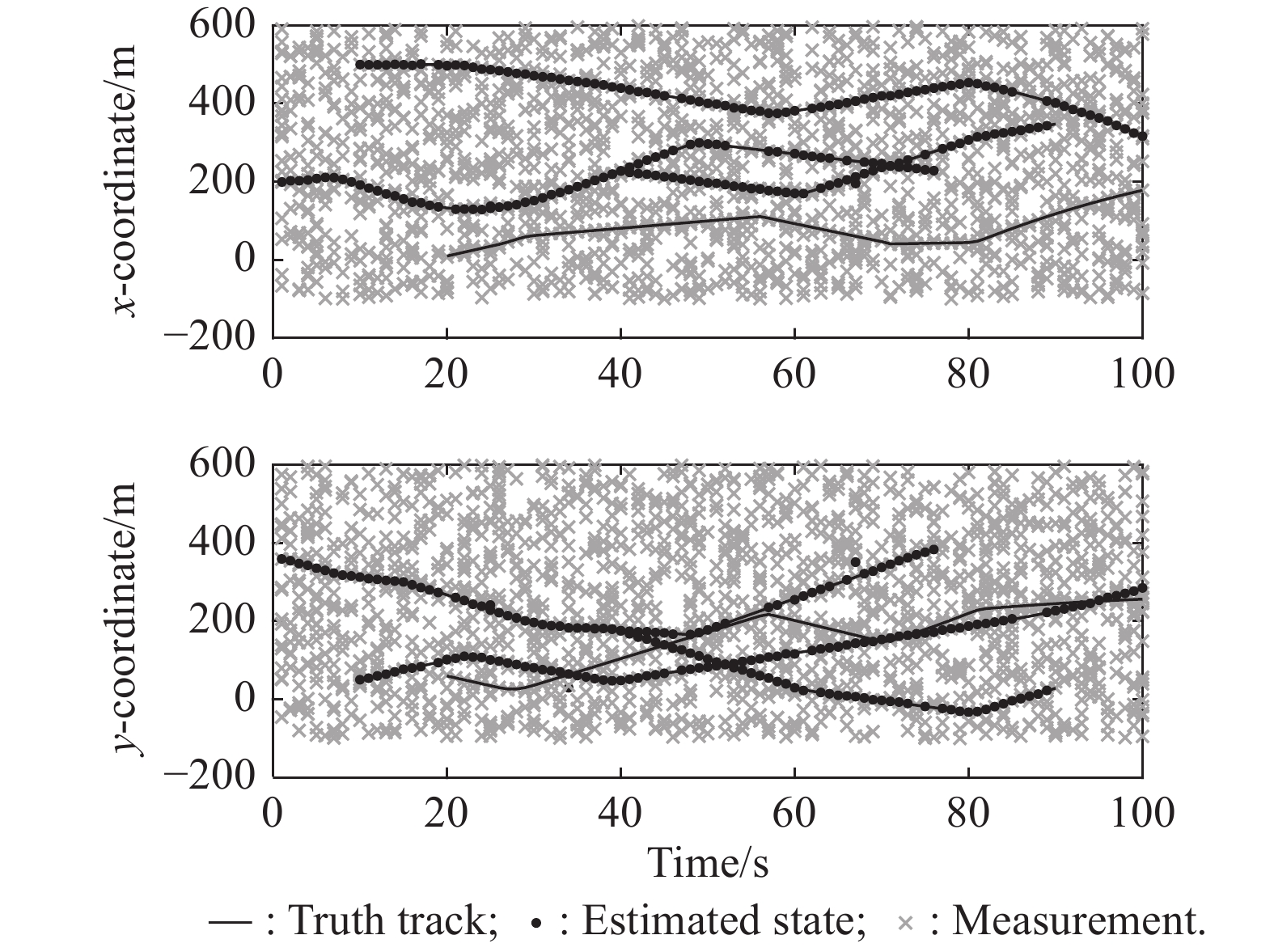
Fig 8
Cardinality estimates of WNTR-MMPHD-ABI filter and original WNTR-MMPHD filter"
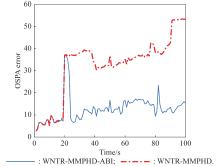
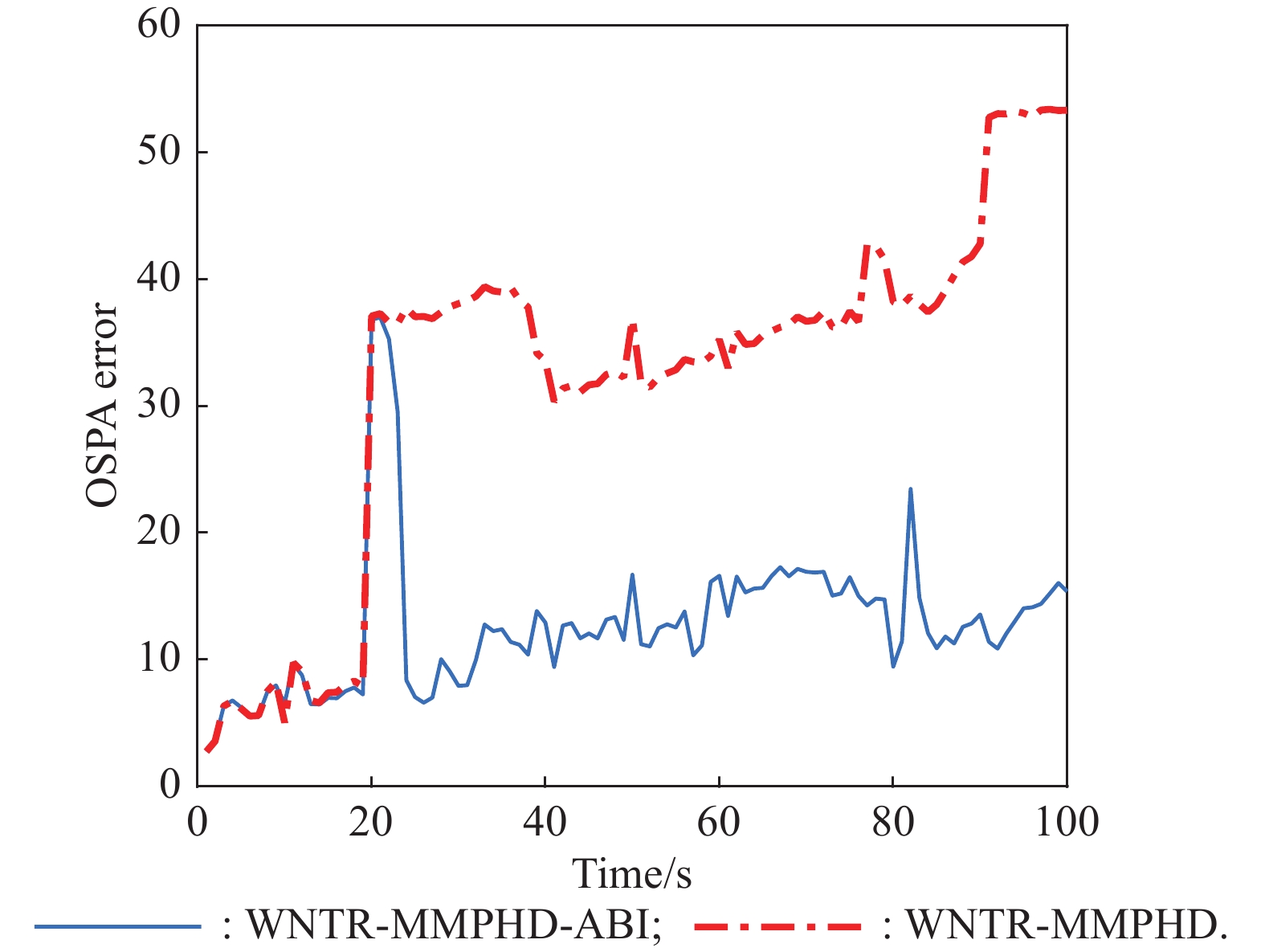
Fig 9
OSPA error of WNTR-MMPHD-ABI filter and original WNTR-MMPHD filter"
| 1 |
MAHLER R P Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. on Aerospace and Electronic Systems, 2003, 39 (4): 1152- 1178.
doi: 10.1109/TAES.2003.1261119 |
| 2 | MAHLER R P. Advances in statistical multisource-multitarget information fusion. Massachusetts: Artech House, 2014. |
| 3 |
VO B N, SINGH S, DOUCET A Sequential Monte Carlo methods for multi-target filtering with random finite sets. IEEE Trans. on Aerospace and Electronic Systems, 2005, 41 (4): 1224- 1245.
doi: 10.1109/TAES.2005.1561884 |
| 4 |
VO B N, MA W K The Gaussian mixture probability hypothesis density filter. IEEE Trans. on Signal Processing, 2006, 54 (11): 4091- 4104.
doi: 10.1109/TSP.2006.881190 |
| 5 |
SHI K, SHI Z G, YANG C Q, et al Road-map aided GM-PHD filter for multivehicle tracking with automotive radar. IEEE Trans. on Industrial Informatics, 2022, 18 (1): 97- 108.
doi: 10.1109/TII.2021.3073032 |
| 6 | KIM D, HWANG I. A multi-target tracker based on Gaussian mixture PHD filter with jump Markov system models. Proc. of the AIAA Scitech 2020 Forum, 2020: 1370. |
| 7 |
PASHA S A, VO B N, TUAN H D, et al A Gaussian mixture PHD filter for jump Markov system models. IEEE Trans. on Aerospace and Electronic Systems, 2009, 45 (3): 919- 936.
doi: 10.1109/TAES.2009.5259174 |
| 8 | BAR-SHALOM Y, LI X R, KIRUBARAJAN T. Estimation with applications to tracking and navigation. New York: John Wiley & Sons, 2001. |
| 9 |
YU Y H Distributed multi-model Bernoulli filters for maneuvering target tracking. IEEE Sensors Journal, 2018, 18 (14): 5885- 5896.
doi: 10.1109/JSEN.2018.2843389 |
| 10 |
PUNITHAKUMAR K, KIRUBARAJAN T, SINHA A Multiple-model probability hypothesis density filter for tracking maneuvering targets. IEEE Trans. on Aerospace and Electronic Systems, 2008, 44 (1): 87- 98.
doi: 10.1109/TAES.2008.4516991 |
| 11 | MAHLER R P. On multitarget jump-Markov filters. Proc. of the IEEE 15th International Conference on Information Fusion, 2012: 149−156. |
| 12 |
GEORGESCU R, WILLETT P The multiple model CPHD tracker. IEEE Trans. on Signal Processing, 2012, 60 (4): 1741- 1751.
doi: 10.1109/TSP.2012.2183128 |
| 13 | GEORGESCU R, DRUMMOND O E, WILLETT P. Multiple model cardinalized probability hypothesis density filter. Proc. of the SPIE Signal and Data Processing of Small Targets, 2011, 8137: 198−207. |
| 14 |
OUYANG C, JI H B, TIAN Y Improved Gaussian mixture CPHD tracker for multitarget tracking. IEEE Trans. on Aerospace and Electronic Systems, 2013, 49 (2): 1177- 1191.
doi: 10.1109/TAES.2013.6494406 |
| 15 | VO B, VO B, CANTONI A The cardinality balanced multi-target multi-Bernoulli filter and its implementations. IEEE Trans. on Signal Processing, 2019, 57 (2): 409- 423. |
| 16 |
LI G C, KONG L J, YI W, et al Multiple model poisson multi-bernoulli mixture filter for maneuvering targets. IEEE Sensors Journal, 2021, 21 (3): 3143- 3154.
doi: 10.1109/JSEN.2020.3022669 |
| 17 | PUNCHIHEWA Y, VO B N, VO B T. A generalized labeled multi-Bernoulli filter for maneuvering targets. Proc. of the IEEE 19th International Conference on Information Fusion, 2016: 980−986. |
| 18 |
VISINA R, BAR-SHALOM Y, WILLWTT P Multiple-model estimators for tracking sharply maneuvering ground targets. IEEE Trans. on Aerospace and Electronic Systems, 2018, 54 (3): 1404- 1414.
doi: 10.1109/TAES.2018.2793019 |
| 19 |
SON H S, PARK J B, JOO Y H Segmentalized FCM-based tracking algorithm for zigzag maneuvering target. International Journal of Control Automation and Systems, 2015, 13, 231- 237.
doi: 10.1007/s12555-013-0406-0 |
| 20 |
RISTIC B, CLARK D, VO B N, et al Adaptive target birth intensity for PHD and CPHD filters. IEEE Trans. on Aerospace and Electronic Systems, 2012, 48 (2): 1656- 1668.
doi: 10.1109/TAES.2012.6178085 |
| 21 |
WU J J, LI K, ZHANG Q J, et al Iterative RANSAC based adaptive birth intensity estimation in GM-PHD filter for multi-target tracking. Signal Processing, 2017, 131, 412- 421.
doi: 10.1016/j.sigpro.2016.09.001 |
| 22 |
QIN Z, LIANG Y G, LI K B, et al Measurement-driven sequential random sample consensus GM-PHD filter for ballistic target tracking. Mechanical Systems and Signal Processing, 2021, 155, 107407.
doi: 10.1016/j.ymssp.2020.107407 |
| 23 | MAGGIO E, CAVALLARO A Learning scene context for multiple object tracking. IEEE Trans. on Image Processing, 2019, 18 (8): 1873- 1884. |
| 24 | BERRY C, BUCCI D. J, SCHMIDT S W. Passive multi-target tracking using the adaptive birth intensity PHD filter. Proc of the IEEE 21st International Conference on Information Fusion, 2018: 353−360. |
| 25 | YANG C Q, SHI Z G, ZHANG H, et al Multiple attacks detection in cyber-physical systems using random finite set theory. IEEE Trans. on Cybernetics, 2019, 50 (9): 4066- 4075. |
| 26 | MAHLER R P. Statistical multisource-multitarget information fusion. Massachusetts: Artech House, 2007. |
| 27 | LI X R, JILKOV V P Survey of maneuvering target tracking. Part V. Multiple-model methods. IEEE Trans. on Aerospace and Electronic Systems, 2015, 41 (4): 1255- 1321. |
| 28 | VO B, MA W. A closed-form solution for the probability hypothesis density filter. Proc. of the IEEE 7th International Conference on Information Fusion, 2005: 856−863. |
| 29 | VISINA R S, BAR-SHALOM Y, WILLETT P State estimators for tracking sharply maneuvering ground targets. Proc of the SPIE XXVI Signal Processing, Sensor/Information Fusion, and Target Recognition, 2017, 10200, 39- 47. |
| 30 |
HWANG I, SEAH C E, LEE S A study on stability of the interacting multiple model algorithm. IEEE Trans. on Automatic Control, 2017, 62 (2): 901- 906.
doi: 10.1109/TAC.2016.2558156 |
| 31 |
FISCHLER M A, BOLLES R C Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography. Communications of the ACM, 1981, 24 (6): 381- 395.
doi: 10.1145/358669.358692 |
| 32 | SCHUHMACHER D, VO B T, VO B N A consistent metric for performance evaluation of multi-object filters. IEEE Trans. on Signal Processing, 2018, 56 (8): 3447- 3457. |
| [1] | Zhuanhua ZHANG, Gongjian ZHOU. Maneuvering target state estimation based on separate modeling of target trajectory shape and dynamic characteristics [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1195-1209. |
| [2] | Yuan ZENG, Wenbin LU, Bo YU, Shifei TAO, Haosu ZHOU, Yu CHEN. Improved IMM algorithm based on support vector regression for UAV tracking [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 867-876. |
| [3] | Zhichao BAO, Qiuxi JIANG, Fangzheng LIU. Multiple model efficient particle filter based track-before-detect for maneuvering weak targets [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 647-656. |
| [4] | Xinglin SHEN, Zhiyong SONG, Hongqi FAN, Qiang FU. Fast density peak-based clustering algorithm for multiple extended target tracking [J]. Journal of Systems Engineering and Electronics, 2019, 30(3): 435-447. |
| [5] | Qiming YANG, Jiandong ZHANG, Guoqing SHI. Modeling of UAV path planning based on IMM under POMDP framework [J]. Journal of Systems Engineering and Electronics, 2019, 30(3): 545-554. |
| [6] | Mahmoudreza HADAEGH, Hamid KHALOOZADEH. Modified switched IMM estimator based on autoregressive extended Viterbi method for maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2018, 29(6): 1142-1157. |
| [7] | Weihua Wu, Jing Jiang, and Yang Wan. Tracking a maneuvering target in clutter with out-of-sequence measurements for airborne radar [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 746-. |
| [8] | Zhenkai Zhang, Jiehao Zhu, Yubo Tian, and Hailin Li. Novel sensor selection strategy for LPI based on an improved IMMPF tracking method [J]. Journal of Systems Engineering and Electronics, 2014, 25(6): 1004-1010. |
| [9] | Xianghua Wang, Xinyu Yang, Zheng Qin, and Huijie Yang. Hierarchical interacting multiple model algorithm based on improved current model [J]. Journal of Systems Engineering and Electronics, 2010, 21(6): 961-967. |
| [10] | Fuming Sun?,Xu E,and Hongyu Ma. Design and comparison of minimal symmetric model-subset for maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2010, 21(2): 268-272. |
| [11] | Nie Xiaohua. Multiple model tracking algorithms based on neural network and multiple process noise soft switching [J]. Journal of Systems Engineering and Electronics, 2009, 20(6): 1227-1232. |
| [12] | Guo Yuying, Jiang Bin, Zhang Youmin & Wang Jianfei. Novel robust fault diagnosis method for flight control systems [J]. Journal of Systems Engineering and Electronics, 2008, 19(5): 1017-1023. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||