
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (2): 485-494.doi: 10.23919/JSEE.2023.000139
• CONTROL THEORY AND APPLICATION • Previous Articles
Dongsheng XU1,2( ), Yuanjin YU1,*(), Xiaoli ZHANG2(), Xiafu PENG2()
), Yuanjin YU1,*(), Xiaoli ZHANG2(), Xiafu PENG2()
Received:2022-06-27
Online:2024-04-18
Published:2024-04-18
Contact:
Yuanjin YU
E-mail:xuds_xmu@163.com;yuanjin.yu@bit.edu.cn;zhxl@xmu.edu.cn;xfpeng@xmu.edu.cn
About author:Supported by:Dongsheng XU, Yuanjin YU, Xiaoli ZHANG, Xiafu PENG. Improved spatio-temporal alignment measurement method for hull deformation[J]. Journal of Systems Engineering and Electronics, 2024, 35(2): 485-494.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
IMU installation"
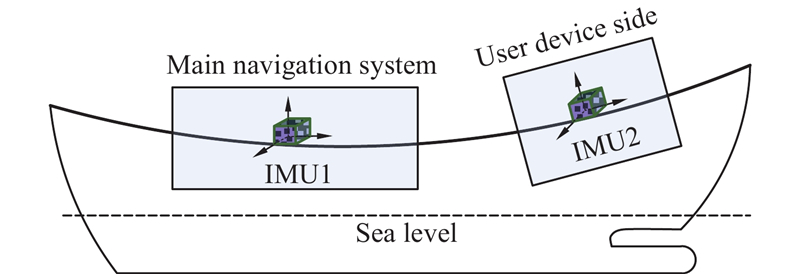

Fig 2
Coordinate definition for spatio-temporal alignment in the hull deformation measurement"
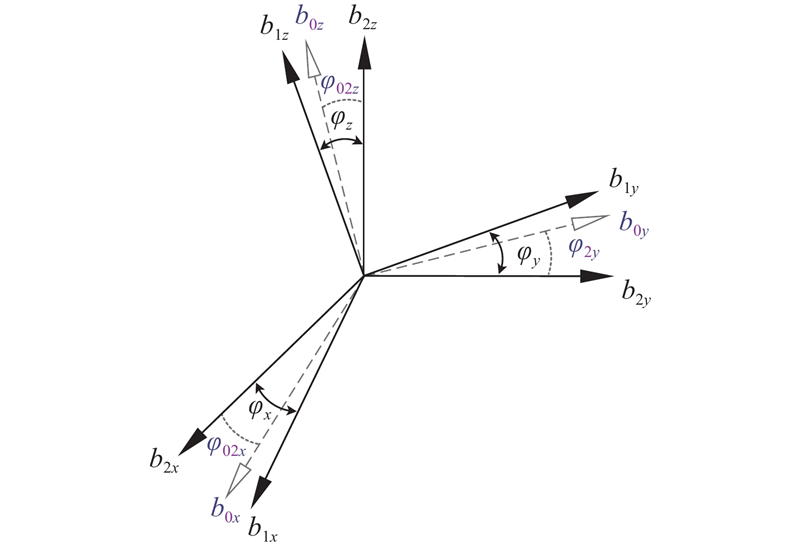

Fig 3
Output time delay between IMU1 and IMU2"

Fig 4
Calculation flow chart of the proposed method"

Table 1
Accuracy result of four comparative methods"
| Evaluating indicator | NoTD- NoMA | TD- NoMA | NoTD- MA | TD- MA |
| TD/ms | − − − | 74.76 73.85 73.06 | − − − | 74.81 74.87 75.03 |
| MA/arc min | − − − | − − − | 407.99 121.12 257.91 | 359.05 181.42 120.16 |
| RMSE/arc min | 395.28 199.44 135.91 | 11.25 5.75 9.05 | 19.20 118.21 90.62 | 0.87 0.29 0.38 |
Fig 5
Error curve of four comparative methods on Z-axis"
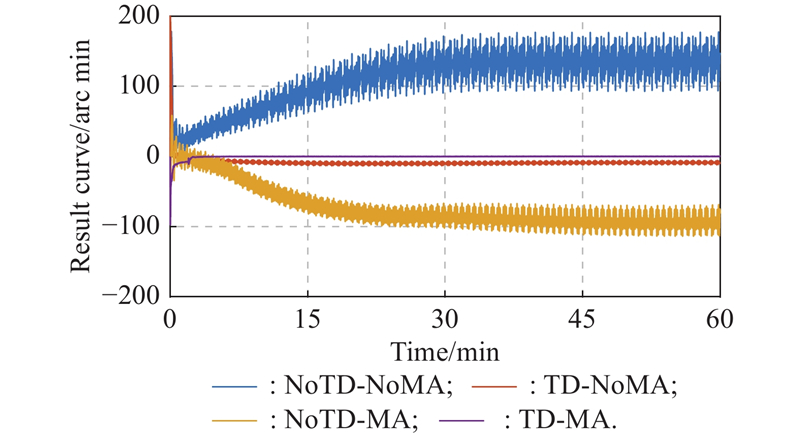
Fig 6
Error curve of TD-MA method"
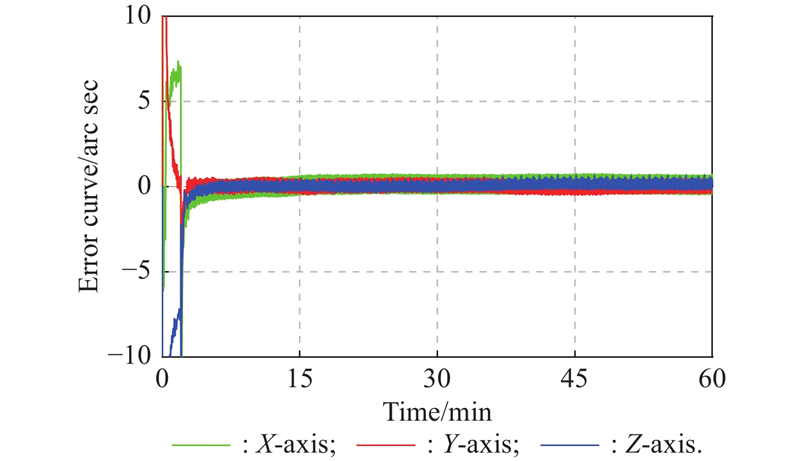
Fig 7
Time delay estimation of TD-MA method"
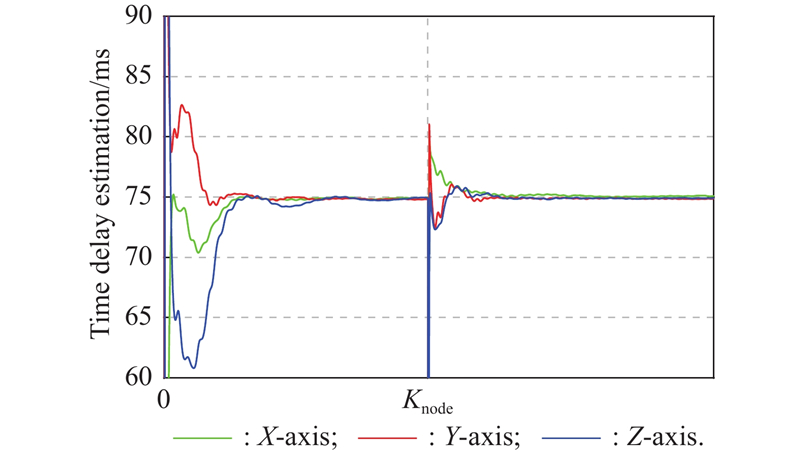
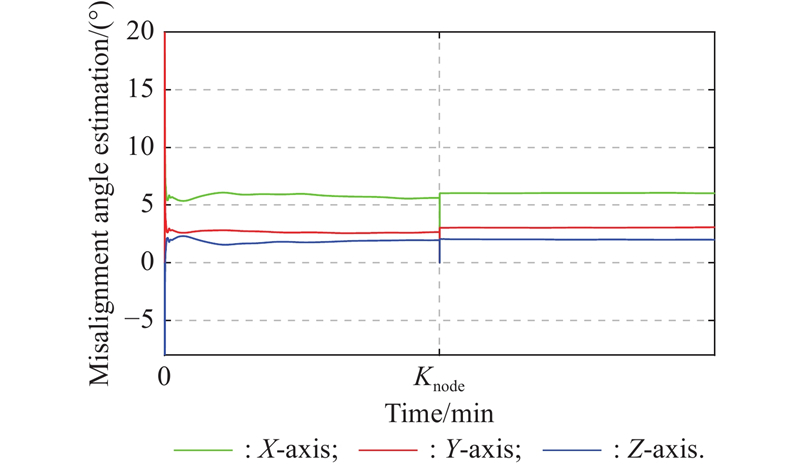
Fig 8
Misalignment angle estimation of TD-MA method"
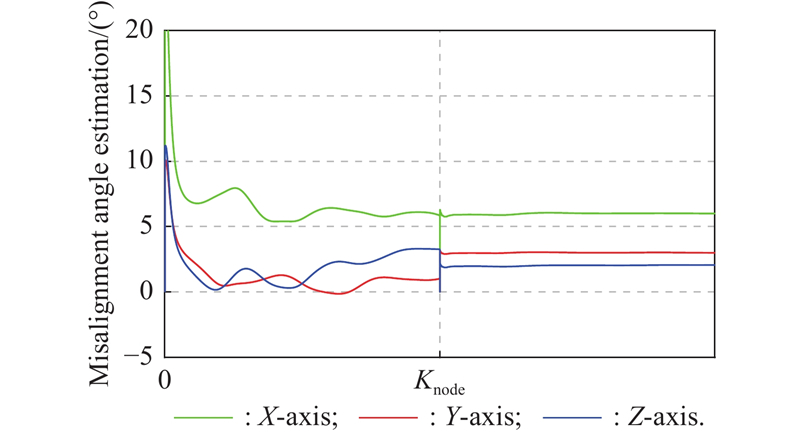

Fig 9
Estimation result of the comparative methods under different time delays and misalignment angles on the X-axis"
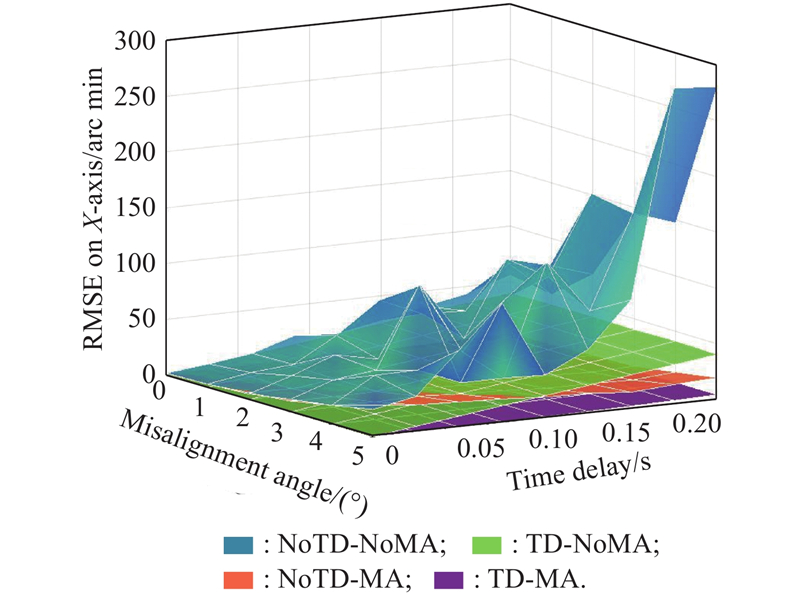
Fig 10
Estimation result of the comparative methods under different time delays and misalignment angles on the Y-axis"
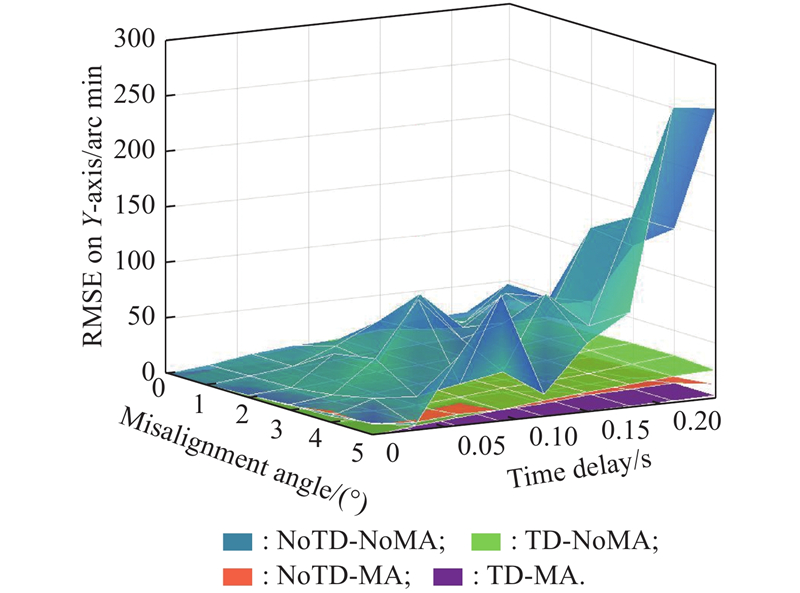

Fig 11
Estimation result of the comparative methods under different time delays and misalignment angles on the Z-axis"
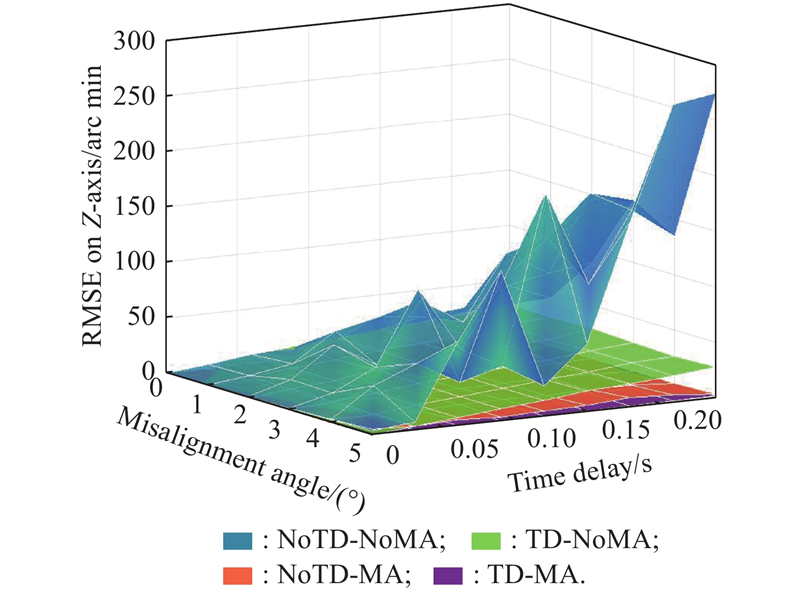

Fig 12
Installation schematic diagram of IMU on the turntable"
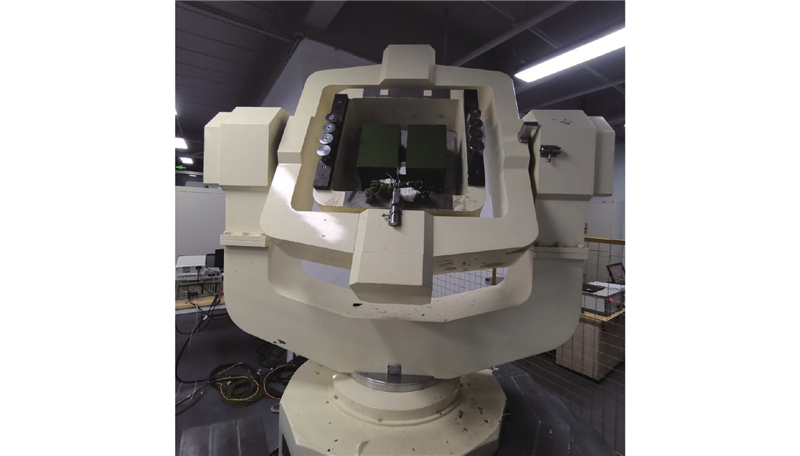
Fig 13
Estimation result curve of hull deformation on X-axis"
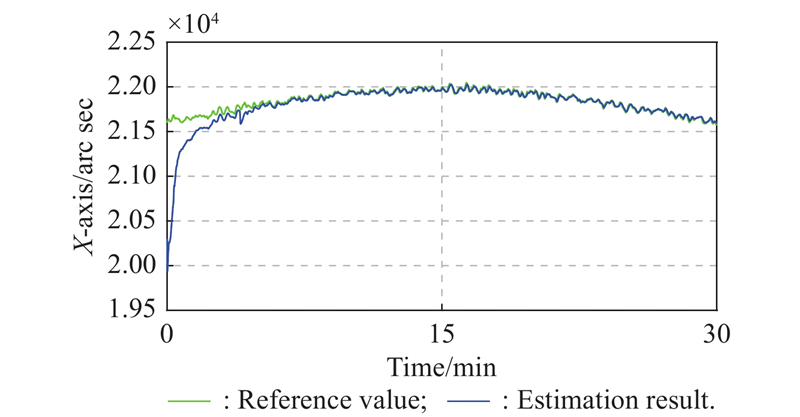
Fig 14
Estimation result curve of hull deformation on Y-axis"
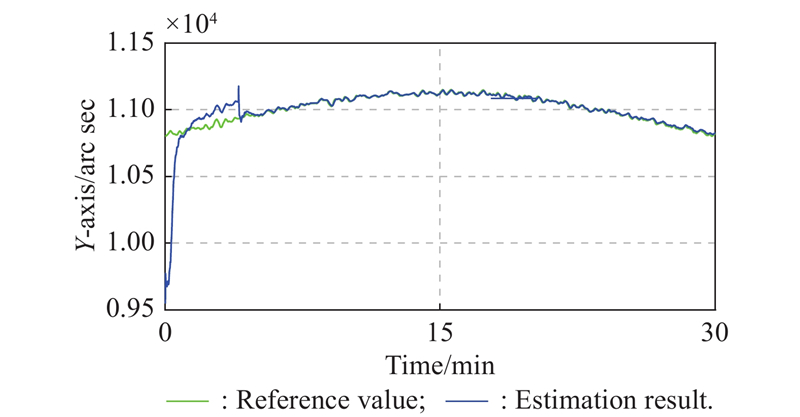
Fig 15
Estimation result curve of hull deformation on Z-axis"
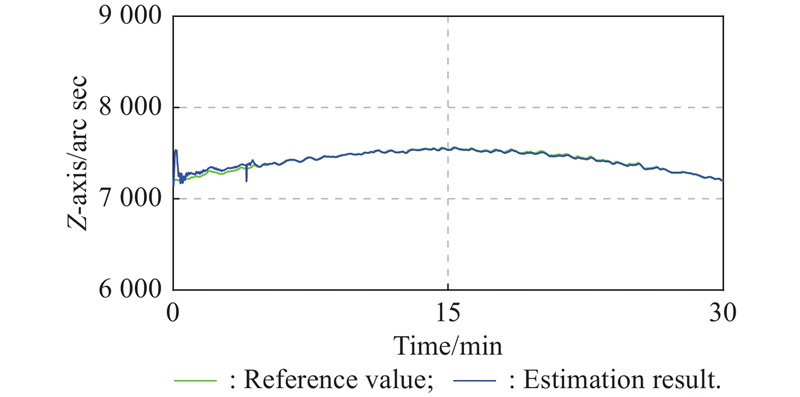

Fig 16
Error curve in platform experiment"
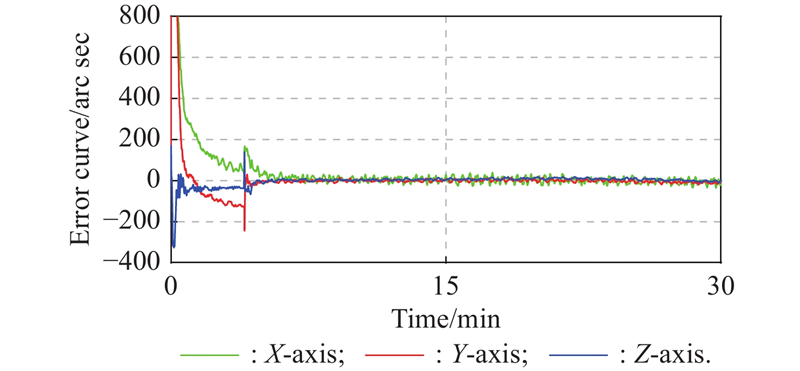
Fig 17
Time delay estimation in platform experiment"
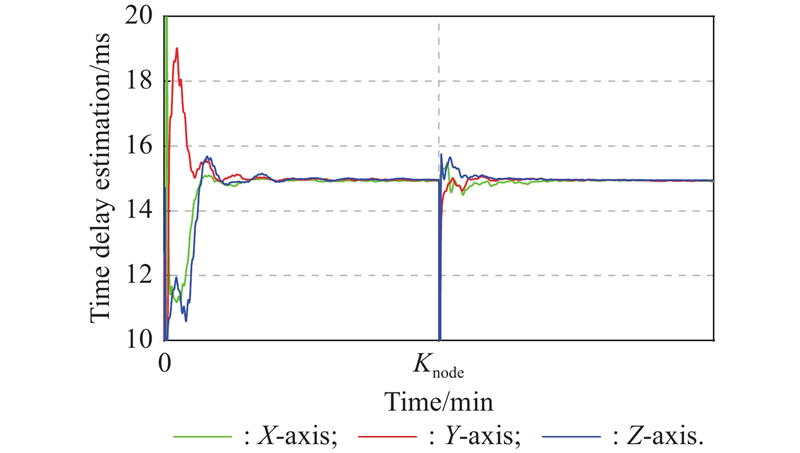
Fig 18
Misalignment angle estimation in platform experiment"
| 7 |
MOCHALOV A V, KAZANTSEV A V Use of ring laser units for measurement of moving object deformations. Proc. of the 2nd International Conference on Lasers for Measurement and Information Transfer, 2002, 4680, 85- 92.
doi: 10.1117/12.454660 |
| 8 |
LEI S, XUE D X, SONG X G Research on shafting alignment considering ship hull deformations. Marine Structures, 2010, 23 (1): 103- 114.
doi: 10.1016/j.marstruc.2010.01.003 |
| 9 | ZHENG J X, QIN S Q, WANG X S, et al Ship hull angular deformation measurement taking slow-varying quasi-static component into account. Journal of Chinese Inertial Technology, 2010, 19 (1): 6- 10. |
| 10 |
WEI W, SHENG C, QIN S Q Online estimation of ship dynamic flexure model parameters for transfer alignment. IEEE Trans. on Control Systems Technology, 2013, 21 (5): 1666- 1678.
doi: 10.1109/TCST.2012.2214778 |
| 11 |
WANG B, DENG Z Z, LIU C, et al Estimation of information sharing error by dynamic deformation between inertial navigation systems. IEEE Trans. on Industrial Electronics, 2014, 61 (4): 2015- 2023.
doi: 10.1109/TIE.2013.2271595 |
| 12 | XU X, GUI J, SUN Y F, et al A robust in-motion alignment method with inertial sensors and Doppler velocity log. IEEE Trans. on Instrumentation and Measurement, 2021, 70, 8500413. |
| 13 | ZHOU Y M, WU W, QIN S Q. Approach for prediction of ship angular deformation based on distributed local inertial measurement units. Proc. of the 5th Symposium on Novel Optoelectronic Detection Technology and Application, 2019, 11023: 307−316. |
| 14 |
LI Y, WANG D, TONG J W A hull deformation measurement method based on fiber optic gyro angular rate matching in complex sea conditions. Proc. of the Institution of Mechanical Engineers, Part M: Journal of Engineering for the Maritime Environment, 2022, 236 (1): 34- 47.
doi: 10.1177/14750902211033264 |
| 15 | ZHANG T, WANG J, JIN B N, et al. Application of improved fifth-degree cubature Kalman filter in the nonlinear initial alignment of strapdown inertial navigation system. Review of Scientific Instruments, 2019, 90(1): 015111. |
| 16 |
BING Z, MIAO W, XU J N, et al Robust adaptive unscented Kalman filter and its application in initial alignment for body frame velocity aided strapdown inertial navigation system. Review of Scientific Instruments, 2018, 89 (11): 115102.
doi: 10.1063/1.5046760 |
| 17 |
SHAO H J, MIAO L J, GAO W X, et al Ensemble particle filter based on KLD and its application to initial alignment of SINS in large misalignment angles. IEEE Trans. on Industrial Electronics, 2018, 65 (11): 8946- 8955.
doi: 10.1109/TIE.2018.2818673 |
| 18 | XU B, DUAN T H, WANG Y F An inertial measurement method of ship deformation based on IMM filtering. Optik, 2017, 140, 601- 609. |
| 19 |
KRAMER K A, STUBBERUD S C, GEREMIA J A Target registration correction using the neural extended Kalman filter. IEEE Trans. on Instrumentation and Measurement, 2010, 59 (7): 1964- 1971.
doi: 10.1109/TIM.2009.2030870 |
| 20 |
HE Y, ZHANG X L, PENG X F, et al Research on hull deformation measurement for large azimuth misalignment angle based on attitude quaternion. Optik, 2019, 182, 159- 169.
doi: 10.1016/j.ijleo.2018.11.023 |
| 21 | WANG Y Y, ZHANG Y, XU D J, et al A deformation measurement algorithm based on adaptive variable parameter multiple model for large ships. IEEE Trans. on Instrumentation and Measurement, 2021, 70, 8504310. |
| 22 |
LU J Z, XIE L L, LI B G Applied quaternion optimization method in transfer alignment for airborne AHRS under large misalignment angle. IEEE Trans. on Instrumentation and Measurement, 2016, 65 (2): 346- 354.
doi: 10.1109/TIM.2015.2502838 |
| 1 |
MENG Y, WANG W, HAN H, et al A vision/radar/INS integrated guidance method for shipboard landing. IEEE Trans. on Industrial Electronics, 2019, 66 (11): 8803- 8810.
doi: 10.1109/TIE.2019.2891465 |
| 2 | WANG B, ZHU J W, MA Z X, et al Improved particle filter-based matching method with gravity sample vector for underwater gravity-aided navigation. IEEE Trans. on Industrial Electronics, 2020, 68 (6): 5206- 5216. |
| 3 | SHEN C, ZHANG Y, GUO X T, et al Seamless GPS/inertial navigation system based on self-Learning square-root cubature Kalman filter. IEEE Trans. on Industrial Electronics, 2020, 68 (1): 499- 508. |
| 4 | LI J C, GAO W, ZHANG Y, et al Gradient descent optimization-based self-alignment method for stationary SINS. IEEE Trans. on Instrumentation and Measurement, 2018, 68 (9): 3278- 3286. |
| 5 |
LIU H B, SUN C, ZHANG Y Q, et al Hull deformation measurement for spacecraft TT&C ship by Photogrammetry. Science China Technological Sciences, 2015, 58, 1339- 1347.
doi: 10.1007/s11431-015-5867-3 |
| 6 | GAO D, ZHENG J X, TAN W F, et al. Review on hull deformation measurement methods. Proc. of the AOPC 2020: Optical Sensing and Imaging Technology, 2020, 11567: 805−810. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||