
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (1): 48-61.doi: 10.23919/JSEE.2023.000172
• ELECTRONICS TECHNOLOGY • Previous Articles
Yu JIN1( ), Xucheng WANG1(), Yunlang XU2(), Jianbo YU2(), Qiaodan LU3(), Xiaofeng YANG1,*()
), Xucheng WANG1(), Yunlang XU2(), Jianbo YU2(), Qiaodan LU3(), Xiaofeng YANG1,*()
Received:2023-06-27
Accepted:2023-11-02
Online:2025-02-18
Published:2025-03-18
Contact:
Xiaofeng YANG
E-mail:21110860033@m.fudan.edu.cn;21110860046@m.fudan.edu.cn;xuyunlang@fudan.edu.cn;jb_yu@fudan.edu.cn;luqd@yg-st.com;xf_yang@fudan.edu.cn
About author:Supported by:Yu JIN, Xucheng WANG, Yunlang XU, Jianbo YU, Qiaodan LU, Xiaofeng YANG. Hysteresis modeling and compensation of piezo actuator with sparse regression[J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 48-61.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
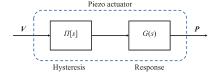
Fig 1
Piezo actuator model"
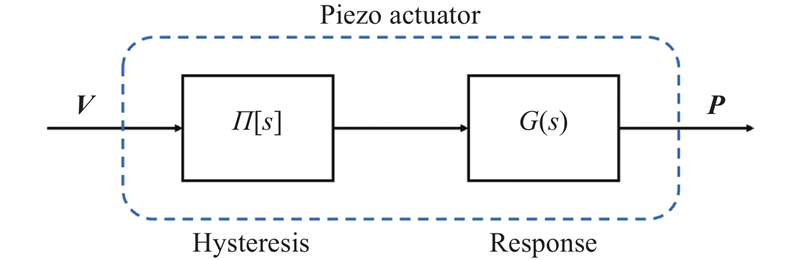

Fig 2
Flow of SINDy model identification"
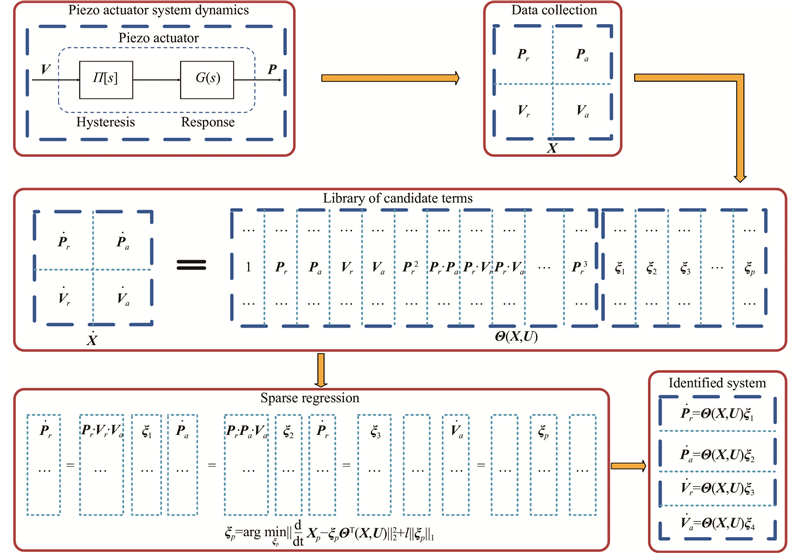

Fig 3
Relay operator model"
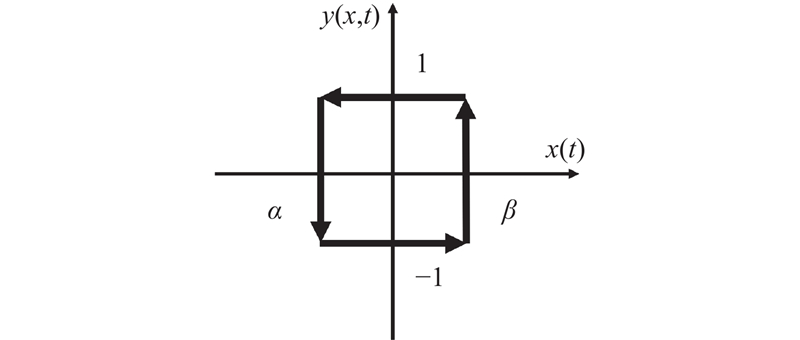

Fig 4
Experimental platform"
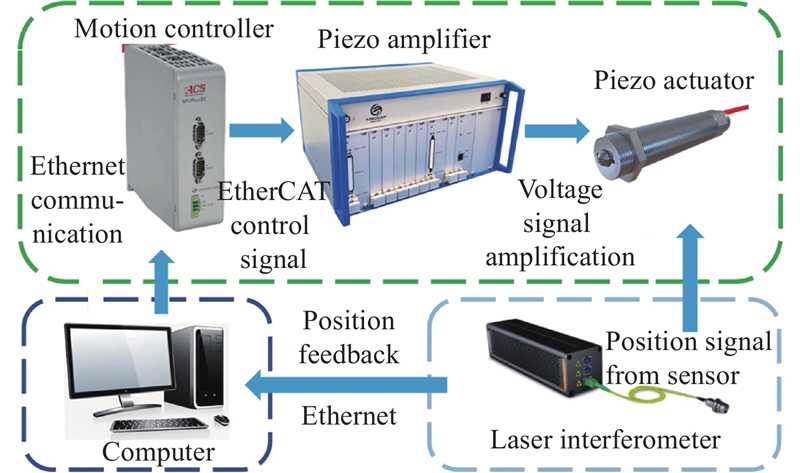
Fig 5
Fitting comparison of hysteresis models (P-I vs. SINDy)"
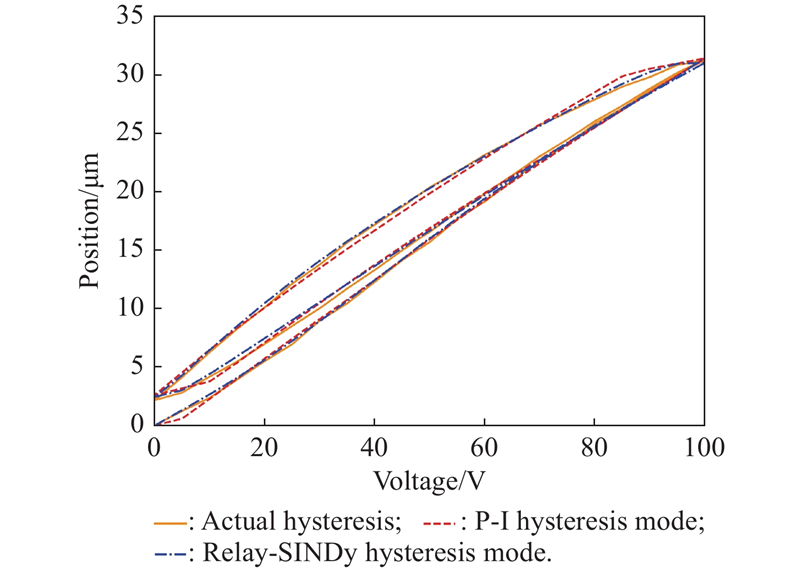
Table 1
Fitting comparison of hysteresis models (P-I vs. SINDy)"
| Model | P-I | Relay-SINDy |
| RMS/μm | ||
| Relative error/% |

Fig 6
Open-loop compensation for piezo actuator"
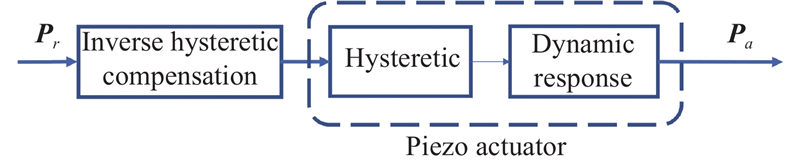

Fig 7
Open-loop experiment by sine signal tracking (1 Hz, 5 Hz, 10 Hz)"
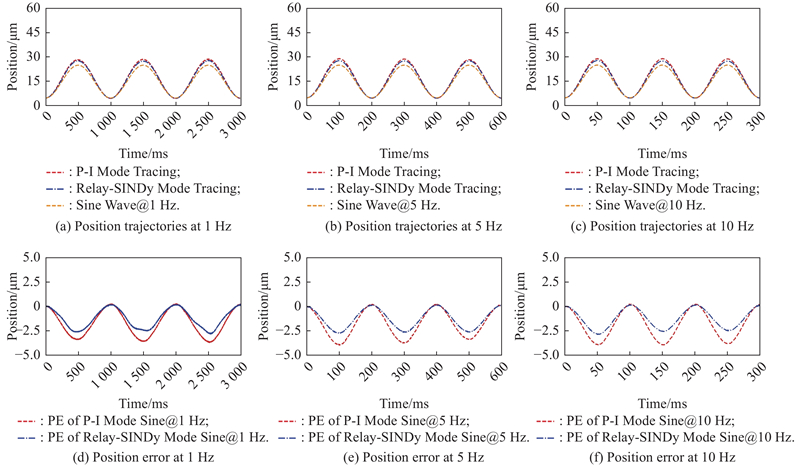
Fig 8
Open-loop experiment by complex signal tracking (1 Hz, 5 Hz, 10 Hz)"
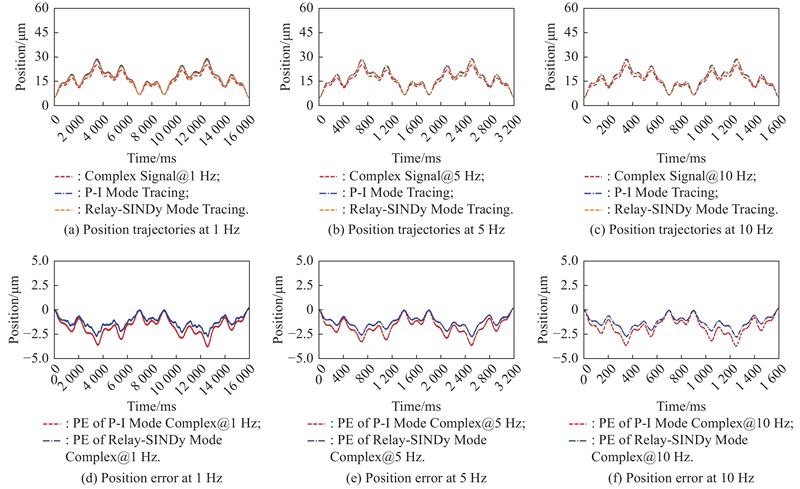
Table 2
Experiment root mean square error"
| Signal input | Frequency/Hz | Relay-SINDy/(μm/%) | P-I/(μm/%) |
| Sine signal | 1 | 1.558/7.79 | 2.118/10.59 |
| 5 | 1.565/7.826 | 2.182/10.910 | |
| 10 | 1.553/7.76 | 2.300/11.504 | |
| Complex signal | 1 | 1.399/6.996 | 1.915/9.575 |
| 5 | 1.371/6.985 | 1.902/9.514 | |
| 10 | 1.404/7.022 | 1.939/9.695 |
Table 3
Experiment maximum error"
| Signal input | Frequency/Hz | Relay-SINDy/(μm/%) | P-I/(μm/%) |
| Sine signal | 1 | 2.828/14.140 | 3.689/18.45 |
| 5 | 2.715/13.575 | 3.944/19.72 | |
| 10 | 2.849/14.245 | 3.915/19.575 | |
| Complex signal | 1 | 2.782/13.910 | 3.846/19.23 |
| 5 | 2.790/13.950 | 3.684/18.420 | |
| 10 | 2.794/13.970 | 3.712/18.560 |

Fig 9
Closed loop compensation for piezo actuator"

Table 4
Simulation root mean square error"
| Signal input | Frequency/Hz | Relay-SINDy/(nm/%) | SINDy/(nm/%) | P-I/(nm/%) |
| Sine signal | 1 | 1.63/0.01 | 74.64/0.37 | 5.261/0.03 |
| 5 | 16.28/0.08 | 130.43/0.65 | 15.51/0.08 | |
| 10 | 34.23/0.17 | 234.54/1.17 | 45.28/0.23 | |
| Complex signal | 1 | 0.31/0.001 | 18.99/0.09 | 2.32/0.01 |
| 5 | 3.24/0.02 | 49.97/0.25 | 4.89/0.03 | |
| 10 | 7.56/0.04 | 66.91/0.33 | 8.59/0.04 |
Table 5
Simulation maximum error"
| Signal input | Frequency/Hz | Relay-SINDy/(nm/%) | SINDy/(nm/%) | P-I/(nm/%) |
| Sine signal | 1 | 2.57/0.01 | 114.89/0.57 | 26.94/0.13 |
| 5 | 24.19/0.12 | 286.81/1.43 | 37.02/0.19 | |
| 10 | 50.90/0.25 | 493.94/2.47 | 94.04/0.47 | |
| Complex signal | 1 | 0.67/0.003 | 38.64/0.19 | 27.48/0.14 |
| 5 | 7.27/0.04 | 105.48/0.53 | 25.34/0.13 | |
| 10 | 16.53/0.08 | 165.79/0.83 | 31.29/0.16 |

Fig 10
Sine signal tracking simulation (1 Hz, 5 Hz, 10 Hz)"
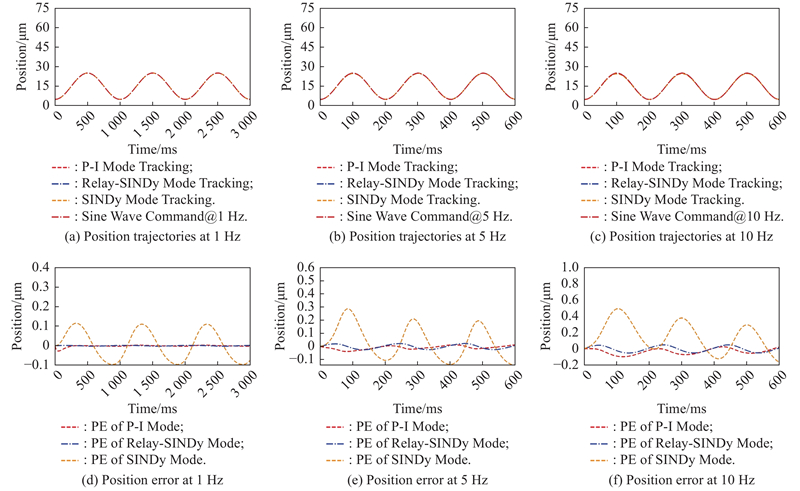
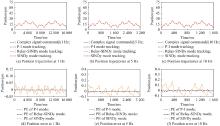
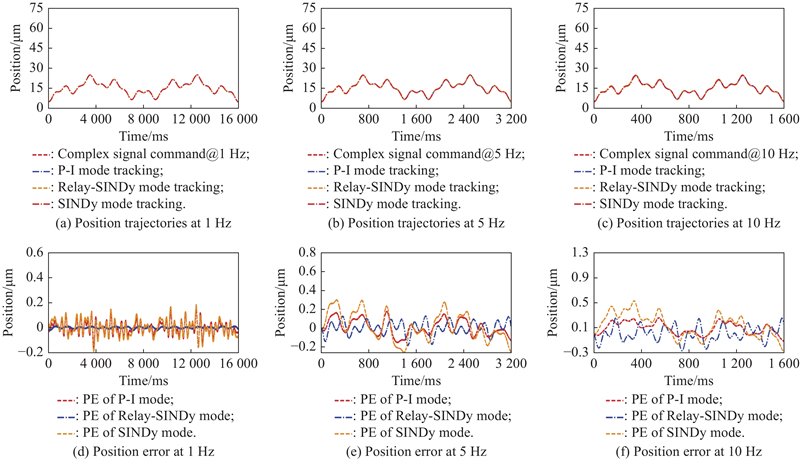
Fig 11
Complex signal tracking simulation (1 Hz, 5 Hz, 10 Hz)"
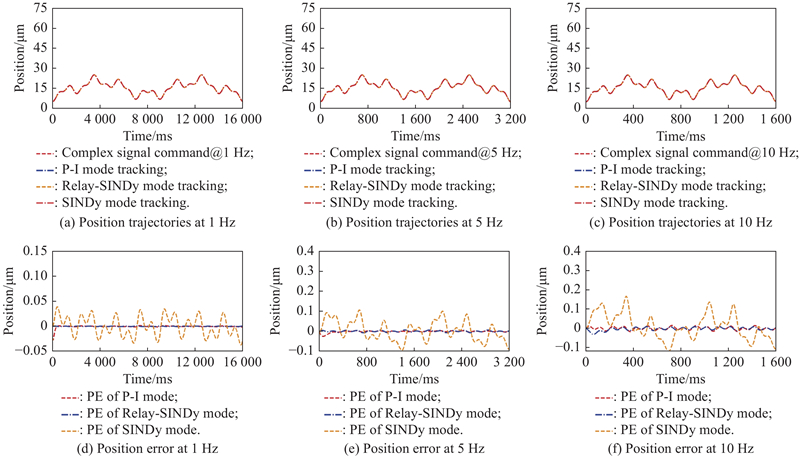
Table 6
Experiment root mean square error"
| Signal input | Frequency/Hz | Relay-SINDy/(nm/%) | SINDy/(nm/%) | P-I/(nm/%) |
| Sine signal | 1 | 38.98/0.19 | 91.96/0.45 | 54.26/ 0.27 |
| 5 | 266.92/1.33 | 590.44/2.95 | 328.63/1.64 | |
| 10 | 492.99/2.47 | 662.34/3.31 | ||
| Complex signal | 1 | 7.33/0.04 | 59.43/0.29 | 49.21/0.24 |
| 5 | 67.49/0.34 | 145.23/ 0.72 | 82.65/0.41 | |
| 10 | 120.16/0.60 | 229.58/1.14 | 130.34/0.65 |
Table 7
Experiment maximum error"
| Signal input | Frequency/Hz | Relay-SINDy/(nm/%) | SINDy/(nm/%) | P-I/(nm/%) |
| Sine signal | 1 | 86.64/0.43 | 230.89/1.15 | 158.54/0.79 |
| 5 | 486.39/2.43 | 601.15/3.00 | ||
| 10 | ||||
| Complex signal | 1 | 26.12/0.13 | 190.43/0.95 | 165.80/0.82 |
| 5 | 183.51/0.92 | 303.04/1.51 | 177.80/0.88 | |
| 10 | 286.15/1.34 | 531.91/2.65 | 259.93/1.29 |

Fig 12
Sine signal tracking experiment (1 Hz, 5 Hz, 10 Hz)"
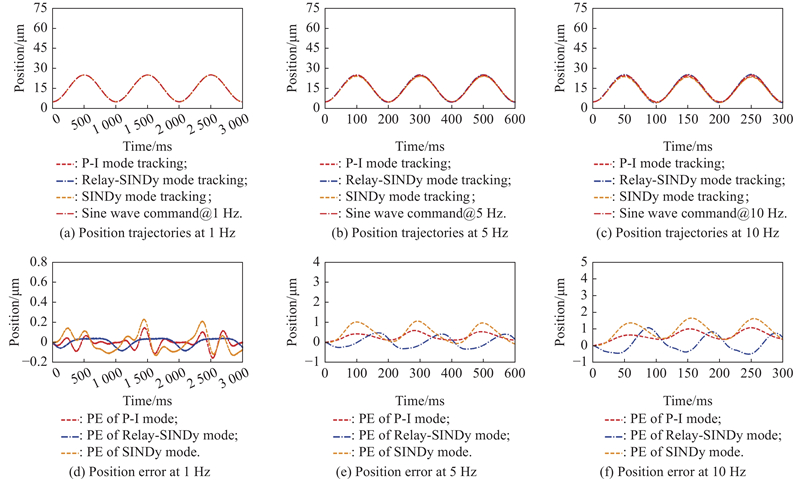
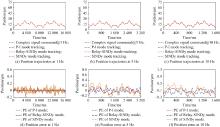
Fig 13
Complex signal tracking experiment (1 Hz, 5 Hz, 10 Hz)"
| 1 |
YU Z Q, ZHANG Y M, JIANG B PID-type fault-tolerant prescribed performance control of fixed-wing UAV. Journal of Systems Engineering and Electronics, 2021, 32 (5): 1053- 1061.
doi: 10.23919/JSEE.2021.000090 |
| 2 |
LI Y, JIANG K, ZENG T, et al Belief reliability modeling and analysis for planetary reducer considering multi-source uncertainties and wear. Journal of Systems Engineering and Electronics, 2021, 32 (5): 1246- 1262.
doi: 10.23919/JSEE.2021.000106 |
| 3 | LI Z, LIU S N, SU C Y. A novel analytical inverse compensation approach for preisach model. Intelligent Robotics and Applications, Part II, 2013, 8103: 656−665. |
| 4 |
YUE H Y, LU Y, DANG C, et al Transfer matrix model and experimental validation for the integrated piezo longitudinal actuators. Journal of Intelligent Material Systems and Structures, 2023, 34 (3): 352- 363.
doi: 10.1177/1045389X221109252 |
| 5 |
LI Z, SHAN J J Inverse compensation based synchronization control of the piezo-actuated fabry-perot spectrometer. IEEE Trans. on Industrial Electronics, 2017, 64 (11): 8588- 8597.
doi: 10.1109/TIE.2017.2711511 |
| 6 | KREBS S. Modeling of a clamping-based piezo actuator in triangular configuration. Proc. of the IEEE 17th International Conference on Advanced Motion Control, 2022: 150−156. |
| 7 |
PREISACH F About the magnetic aftereffect. Zeitschrift Fur Physik, 1935, 94 (5/6): 277- 302.
doi: 10.1007/BF01349418 |
| 8 | KRASNOSELSKII M A, POKROVSKII A V, CHERNORUTSKII V V, et al Dynamics of controlled systems described by parabolic equations with hysteresis nonlinearities. Automation and Remote Control, 1992, 53 (11): 1705- 1711. |
| 9 |
LI Z, SHAN J J, GABBERT U Inverse compensation of hysteresis using Krasnoselskii-Pokrovskii model. IEEE/ASME Trans. on Mechatronics, 2018, 23 (2): 966- 971.
doi: 10.1109/TMECH.2018.2805761 |
| 10 | MANG H W, XU Y, AN D, et al Compensation of hysteresis on piezo actuators based on tripartite PI model. Nanotechnology and Precision Engineering, 2017, 15, 53- 60. |
| 11 |
WEN Y K Method for random vibration of hysteretic systems. Journal of the Engineering Mechanics Division, 1976, 102 (2): 249- 263.
doi: 10.1061/JMCEA3.0002106 |
| 12 |
COLEMAN B D, HODGDON M L On a class of constitutive relations for ferromagnetic hysteresis. Archive for Rational Mechanics and Analysis, 1987, 99, 375- 396.
doi: 10.1007/BF00282052 |
| 13 |
LI Z, SHAN J J Modeling and inverse compensation for coupled hysteresis in piezo-actuated fabry-perot spectrometer. IEEE/ASME Trans. on Mechatronics, 2017, 22 (4): 1903- 1913.
doi: 10.1109/TMECH.2017.2703167 |
| 14 |
LI Z, SU C Y, CHAI T Y Compensation of hysteresis nonlinearity in magnetostrictive actuators with inverse multiplicative structure for Preisach model. IEEE Trans. on Automation Science and Engineering, 2014, 11 (2): 613- 619.
doi: 10.1109/TASE.2013.2284437 |
| 15 | XU Y L, SHU F, SU X Y, et al A composite neural network-based adaptive sliding mode control method for reluctance actuator maglev system. Neural Computing & Applications, 2023, 35 (21): 15877- 15890. |
| 16 | CHENG L, LIU W, HOU Z G, et al Neural-network-based nonlinear model predictive control for piezoelectric actuators. IEEE Trans. on Industrial Electronics, 2015, 62 (12): 7717- 7727. |
| 17 |
KOGA K, TAKEMOTO K Simple black-box universal adversarial attacks on deep neural networks for medical image classification. Algorithms, 2022, 15 (5): 144.
doi: 10.3390/a15050144 |
| 18 | WANG Y F, ZHOU M L Data driven adaptive control with hysteresis input for a piezo-actuated stage. Proc. of the IEEE 10th Data Driven Control and Learning Systems Conference, 2021, 218- 223. |
| 19 |
LI C T, TAN Y H Adaptive control of system with hysteresis using neural networks. Journal of Systems Engineering and Electronics, 2006, 17 (1): 163- 167.
doi: 10.1016/S1004-4132(06)60028-5 |
| 20 |
MANGAN N M, BRUNTON S L, PROCTOR J L, et al Inferring biological networks by sparse identification of nonlinear dynamics. IEEE Trans. on Molecular, Biological and Multi-Scale Communications, 2016, 2 (1): 52- 63.
doi: 10.1109/TMBMC.2016.2633265 |
| 21 | SU W J J. When is the first spurious variable selected by sequential regression procedures? Biometrika, 2018, 105(3): 517−527. |
| 22 |
MANGAN N M, ASKHAM T, BRUNTON S L, et al Model selection for hybrid dynamical systems via sparse regression. Proceedings of the Royal Society A-Mathematical Physical and Engineering Sciences, 2019, 475 (2223): 20180534.
doi: 10.1098/rspa.2018.0534 |
| 23 | CARPENTIER A, COLLIER O, COMMINGES L, et al Estimation of the L(2)-norm and testing in sparse linear regression with unknown variance. Bernoulli, 2022, 28 (4): 2744- 2787. |
| 24 | FASEL U, KUTZ J N, NROUNTON B W, et al. Ensemble-SINDy: robust sparse model discovery in the low-data, high-noise limit, with active learning and control. Proceedings of the Royal Society A-Mathematical Physical and Engineering Sciences, 2022, 478(2260): 20210904. |
| 28 |
KAHEMAN K, KUTZ J N, BRUNTON S L SINDy-PI: a robust algorithm for parallel implicit sparse identification of nonlinear dynamics. Proceedings of the Royal Society A, 2020, 476 (2242): 20200279.
doi: 10.1098/rspa.2020.0279 |
| 29 | HU L, YI G X, HUANG C. A sparse algorithm for adaptive pruning least square support vector regression machine based on global representative point ranking. Journal of Systems Engineering and Electronics, 2021, 32(1): 151−162. |
| 30 |
LIN W, SHI P X, FENG R, et al Variable selection in regression with compositional covariates. Biometrika, 2014, 101 (4): 785- 797.
doi: 10.1093/biomet/asu031 |
| 31 |
ZHANG X Y, XU H Z, LI Z, et al Adaptive neural piecewise implicit inverse controller design for a class of nonlinear systems considering butterfly hysteresis. IEEE Trans. on Systems Man Cybernetics-Systems, 2023, 53 (6): 3695- 3706.
doi: 10.1109/TSMC.2022.3231261 |
| 32 |
PEREV K L Rational function approximation of the relay with hysteresis nonlinear element. IFAC Papersonline, 2021, 54 (14): 19- 24.
doi: 10.1016/j.ifacol.2021.10.322 |
| 33 | LI Z, SHAN J J, GABBERT U A direct inverse model for hysteresis compensation. IEEE Trans. on Industrial Electronics, 2020, 68 (5): 4173- 4181. |
| 34 | ZHANG X Y, LIU Y H, CHEN X K, et al. Adaptive pseudoinverse control for constrained hysteretic nonlinear systems and its application on dielectric elastomer actuator. IEEE/ASME Trans. on Mechatronics, 2023, 28(4): 2142−2154. |
| 35 |
LIU L, SHAN L, DAI Y W, et al Improved quantum bacterial foraging algorithm for tuning parameters of fractional-order PID controller. Journal of Systems Engineering and Electronics, 2018, 29 (1): 166- 175.
doi: 10.21629/JSEE.2018.01.17 |
| 25 | KIM S H, BOUKOUVALA F. Machine learning-based surrogate modeling for data-driven optimization: a comparison of subset selection for regression techniques. Optimization Letters, 2020, 14(4): 989−1010. |
| 26 | MOJAHEDI H, SANGAR AB, MASDARI M. Towards tax evasion detection using improved particle swarm optimization algorithm. Mathematical Problems in Engineering, 2022, 2022: 1027518. |
| 27 | MESSENGER D A, BORTZ D M Weak SINDy: Galerkin-based data-driven model selection. Multiscale Modeling & Simulation, 2021, 19 (3): 1474- 1497. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||