
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (5): 1109-1121.doi: 10.23919/JSEE.2024.000040
• ELECTRONICS TECHNOLOGY • Previous Articles Next Articles
Chenghu CAO1( ), Yongbo ZHAO2,*()
), Yongbo ZHAO2,*()
Received:2022-01-10
Accepted:2023-12-15
Online:2024-10-18
Published:2024-11-06
Contact:
Yongbo ZHAO
E-mail:cccao@xupt.edu.cn;ybzhao@xidian.edu.cn
About author:Supported by:Chenghu CAO, Yongbo ZHAO. Multiple-model GLMB filter based on track-before-detect for tracking multiple maneuvering targets[J]. Journal of Systems Engineering and Electronics, 2024, 35(5): 1109-1121.
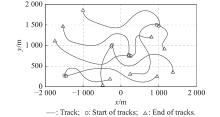
Fig 1
Sample snapshot of multi-target trajectories"
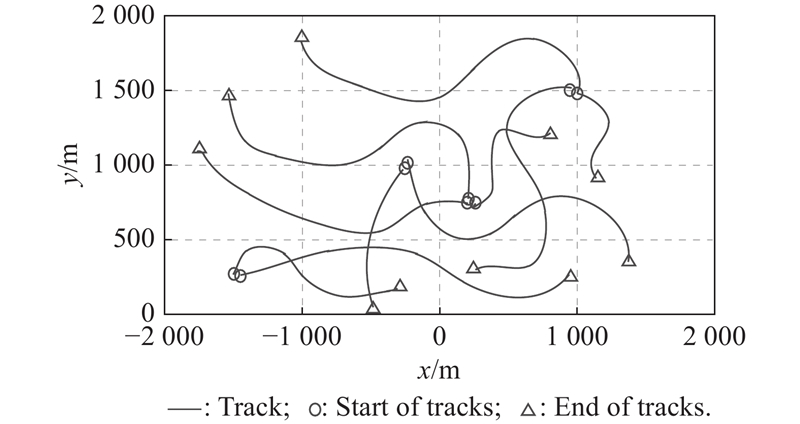
Table 1
Main parameters"
| Symbol | Parameter | Value |
| Blurring factor | 1 | |
| Source intensity | 1 | |
| Sampling time interval/s | 1 | |
| Survival probability | 0.98 | |
| SCR | SCR/dB | {8,9,10,12,13} |
| Intensity of the clutter | {60,90,120,150} | |
| Cell side length | ||
| Illustrating template | ||
| Shape and scale parameter |
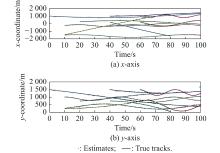
Fig 2
Simulated scenario and estimated trajectories"
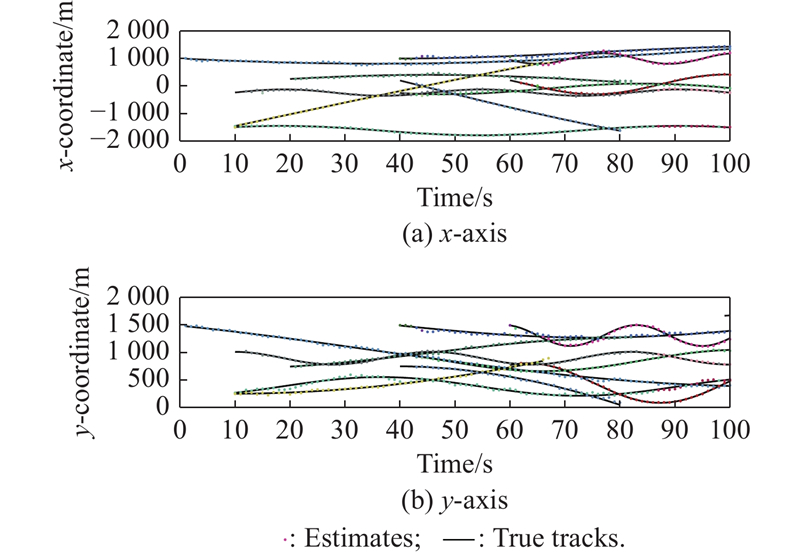
Fig 3
OSPA error for different TBD-based algorithms with fixed motion mode"
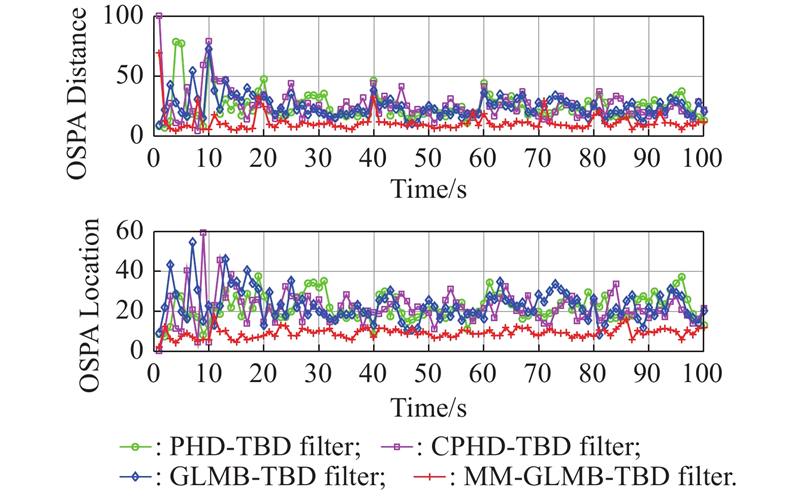
Fig 4
Cardinality statistics for different TBD-based algorithms with fixed motion mode"
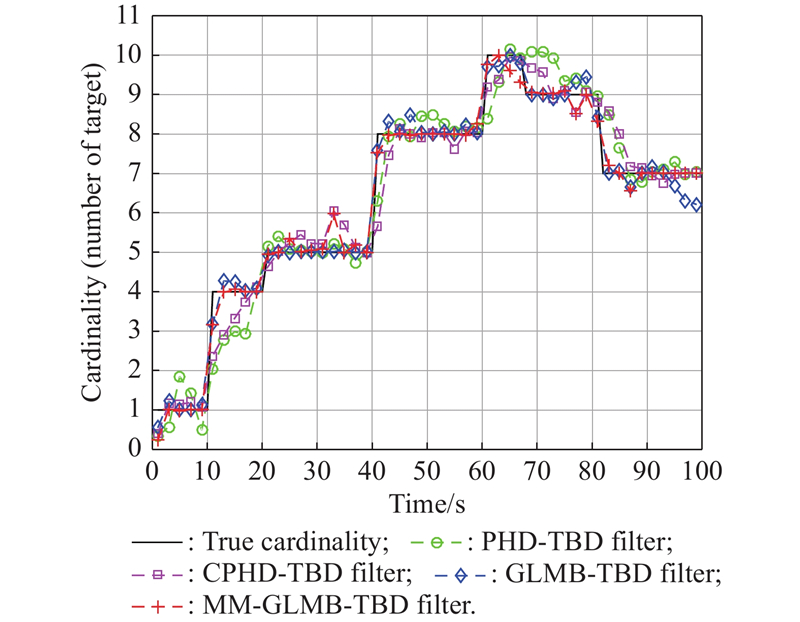

Fig 5
OSPA error for different algorithms with JMS"
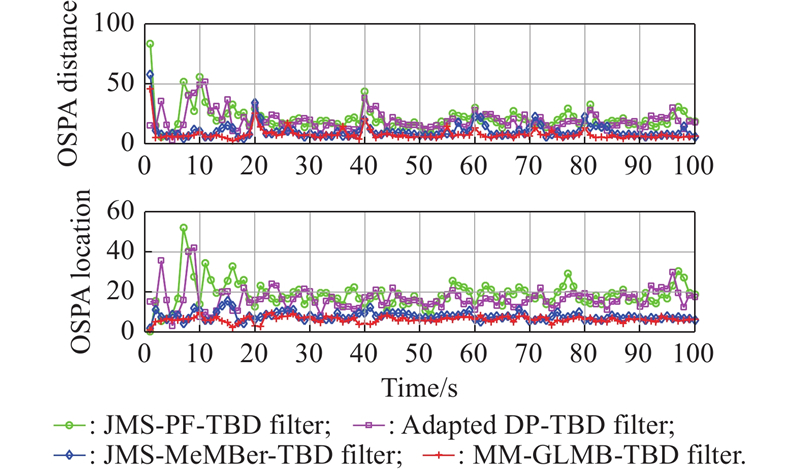
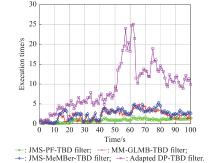
Fig 6
Computational complexity for different TBD-based algorithms with JMS"
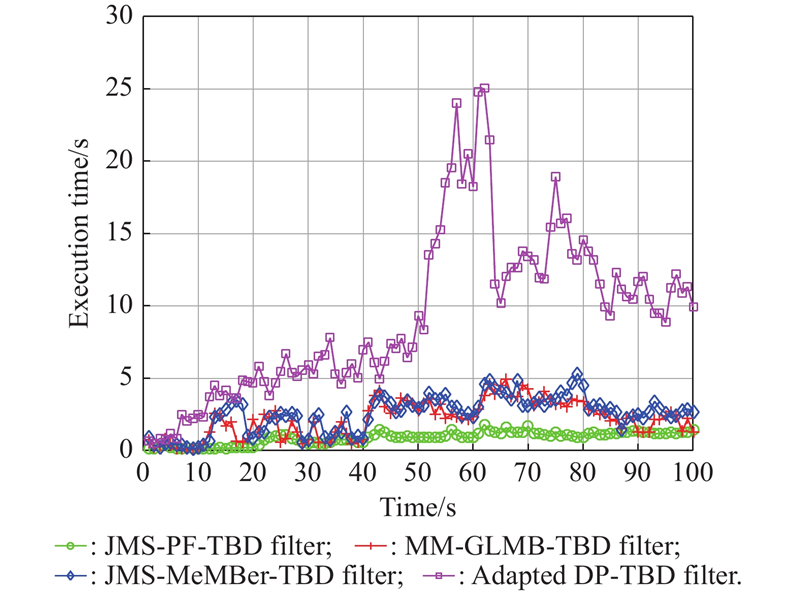
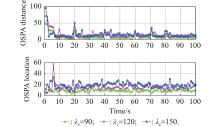
Fig 7
OSPA error for the proposed MM-GLMB-TBD with different clutter rates"
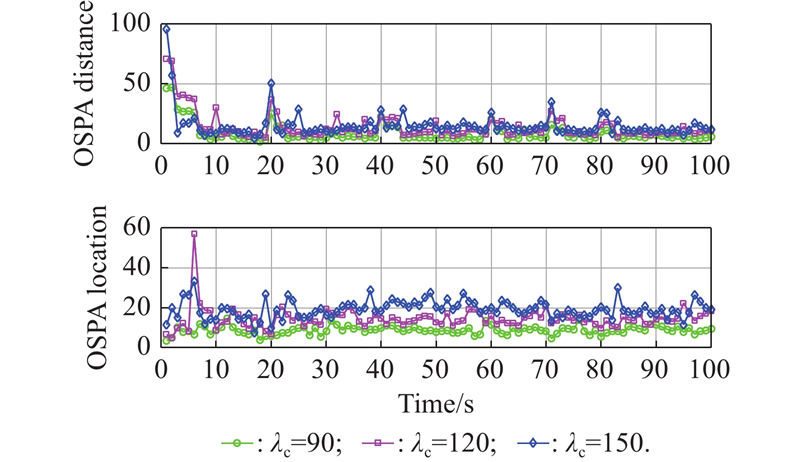
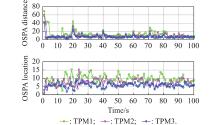
Fig 8
OSPA error for the proposed MM-GLMB-TBD with different TPMs"
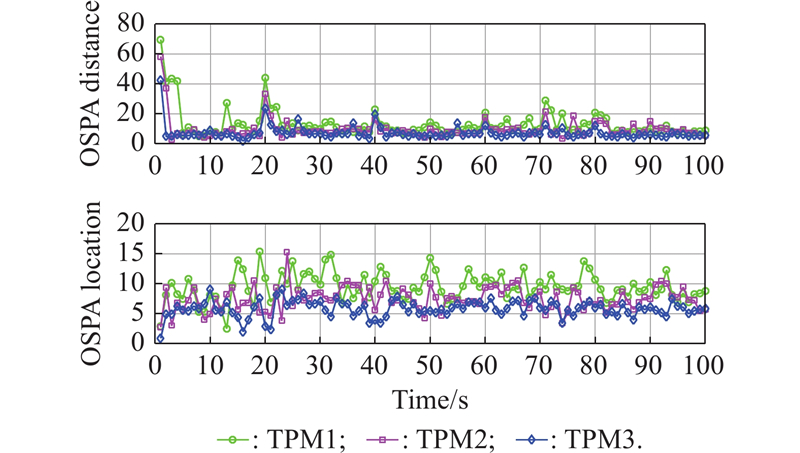
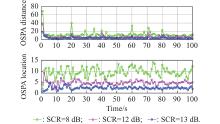
Fig 9
OSPA error for the proposed MM-GLMB-TBD filter with different SCRs"
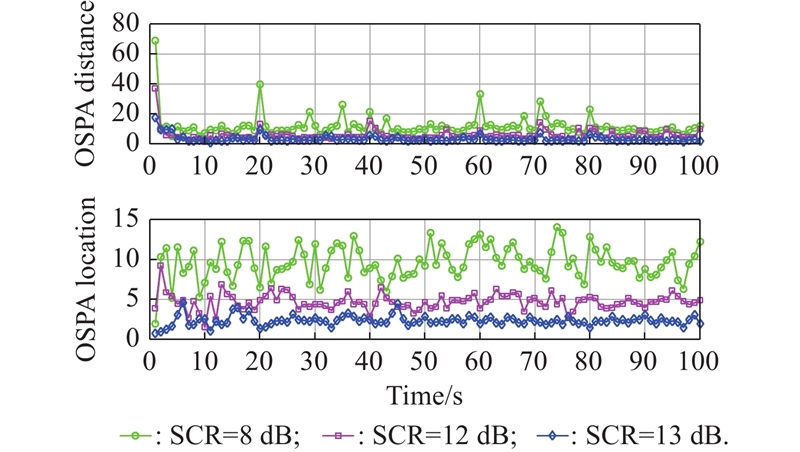
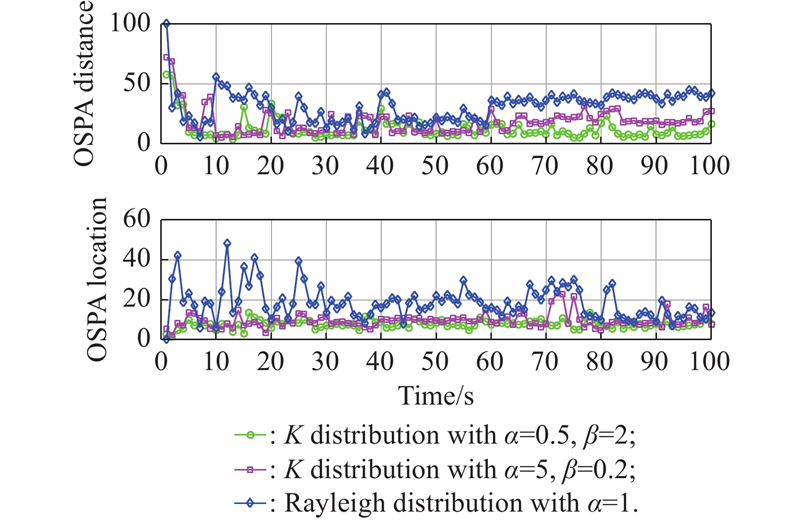
Fig 10
OSPA error for the proposed MM-GLMB-TBD filter with different clutter parameters and clutter models in the scenario with SCR=8 dB and $ {{\boldsymbol{\lambda}} _{\boldsymbol{c}}} {\boldsymbol{= 90}} $"
| 1 |
LI T C Arithmetic average density fusion-Part II: unified derivation for unlabeled and labeled RFS fusion. IEEE Trans. on Aerospace and Electronic Systems, 2024, 60 (3): 3255- 3268.
doi: 10.1109/TAES.2024.3359592 |
| 2 |
ZHU Y, WANG J, LIANG S Efficient joint probabilistic data association filter based on Kullback-Leibler divergence for multi-target tracking. IET Radar, Sonar and Navigation, 2017, 11 (10): 1540- 1548.
doi: 10.1049/iet-rsn.2017.0102 |
| 3 | ALLICK M, CORALUPPI S, CARTHEL C. Multitarget tracking using multiple hypothesis tracking. Hoboken: Wiley, 165−201. |
| 4 |
KOCH W, KEUK G V Multiple hypothesis track maintenance with possibly unresovled measurements. IEEE Trans. on Aerospace and Electronic System, 1997, 33 (3): 883- 892.
doi: 10.1109/7.599263 |
| 5 |
CHEUNG B, DAVEY S, GRAY D Probabilistic multi-hypothesis tracker for multiple platform path planning. IET Radar, Sonar and Navigation, 2015, 9 (3): 255- 265.
doi: 10.1049/iet-rsn.2014.0089 |
| 6 |
VO B N, VO B T, PHAM N T, et al Joint detection and estimation of multiple objects from image observations. IEEE Trans. on Signal Processing, 2010, 58 (10): 5129- 5241.
doi: 10.1109/TSP.2010.2050482 |
| 7 |
LI S Q, YI W, HOSEINNEZHAD R, et al Multi-objection tracking for generic observation model using labeled random finite sets. IEEE Trans. on Signal Processing, 2018, 66 (2): 368- 383.
doi: 10.1109/TSP.2017.2764864 |
| 8 |
LI G, LI G C, HE Y Distributed GGIW-CPHD-based extended target tracking over a sensor network. IEEE Signal Processing, 2022, 29, 842- 846.
doi: 10.1109/LSP.2022.3158589 |
| 9 |
ÁNGEL F, FERNANDEZ G, MASKELL S Continuous-discrete multiple target filtering: PMBM, PHD and CPHD filter implementations. IEEE Trans. on Signal Processing, 2020, 68, 1300- 1314.
doi: 10.1109/TSP.2020.2968247 |
| 10 |
LI C, WANG W G, KIRUBARAJAN T, et al PHD and CPHD filtering with unknown detection probability. IEEE Trans. on Signal Processing, 2018, 66 (14): 3784- 3798.
doi: 10.1109/TSP.2018.2835398 |
| 11 |
DA K, LI T C, ZHU Y F, et al Gaussian mixture particle jump-Markov-CPHD fusion for multitarget tracking using sensors with limited views. IEEE Trans. on Signal and Information Processing over Networks, 2020, 6, 605- 616.
doi: 10.1109/TSIPN.2020.3016478 |
| 12 |
LI T C, JUAN M, SUN S Partial consensus and conservative fusion of gaussian mixtures for distributed PHD fusion. IEEE Trans. on Aerospace and Electronic System, 2019, 55 (5): 2150- 2163.
doi: 10.1109/TAES.2018.2882960 |
| 13 |
JONES B A CPHD Filter birth modeling using the probabilistic admissible region. IEEE Trans. on Aerospace and Electronic System, 2018, 54 (3): 1456- 1469.
doi: 10.1109/TAES.2018.2793378 |
| 14 | YU B R, LI T C, GE S J, et al Robust CPHD fusion for distributed multitarget tracking using asynchronous sensors. IEEE Sensor Journal, 2021, 22 (1): 1030- 1040. |
| 15 |
NANNURU S, BLOUIN S, COATES M, et al Multi-sensor CPHD filter. IEEE Trans. on Aerospace and Electronic System, 2016, 52 (4): 1834- 1854.
doi: 10.1109/TAES.2016.150265 |
| 16 |
YI W, LI G C, BATTISTELLI G Distributed multi-sensor fusion of PHD filters with different sensor fields of view. IEEE Trans. on Signal Processing, 2020, 68, 5204- 5218.
doi: 10.1109/TSP.2020.3021834 |
| 17 | BRYANT D S, DELANDE E D, GEHLY S, et al The CPHD filter with target spawning. IEEE Trans. on Signal Processing, 2017, 65 (5): 1324- 1338. |
| 18 |
YI W, CHAI L Heterogeneous multi-sensor fusion with random finite set multi-object densities. IEEE Trans. on Signal Processing, 2021, 69, 3399- 3414.
doi: 10.1109/TSP.2021.3087033 |
| 19 |
BRYANT D S, VO B T, VO B N, et al A generalized labeled multi-Bernoulli filter with object spawning. IEEE Trans. on Signal Processing, 2018, 66 (23): 6177- 6189.
doi: 10.1109/TSP.2018.2872856 |
| 20 | PAPI F, KIM D A particle multi-target tracker for superpositional measurements using labeled random finite sets. IEEE Trans. on Signal Processing, 2015, 63 (16): 4348- 4358. |
| 21 |
VO B N, VO B T, HOANG H G An efficient implementation of the generalized labeled multi-Bernoulli filter. IEEE Trans. on Signal Processing, 2017, 65 (8): 1975- 1987.
doi: 10.1109/TSP.2016.2641392 |
| 22 | BEARD M, VO B T, VO B N Bayesian multi-target tracking with merged measurements using labeled random finite sets. IEEE Trans. on Signal Processing, 2015, 63 (6): 1433- 1447. |
| 23 | GOSTAR A K, HOSEINNEZHAD R, RATHNAVAKE T, et al. Constrained sensor control for labeled multi-Bernoulli filter using Cauchy-Schwarz divergence. IEEE Trans. on Signal Processing, 2017, 24(9): 1313−1317. |
| 24 | PAPI F, VO B N, VO B T, et al Generalized labeled multi-Bernoulli approximation of multi-object densities. IEEE Trans. on Signal Processing, 2015, 63 (20): 5487- 5497. |
| 25 |
LI S Q, BATTISTELLI G, CHISCI L, et al Computationally efficient multi-agent multi-object tracking with labeled random finite sets. IEEE Trans. on Signal Processing, 2019, 67 (1): 260- 275.
doi: 10.1109/TSP.2018.2880704 |
| 26 |
WIEN T, MEYER F, HLAWATSCH F A fast labeled multi-Bernoulli filter using belief propagation. IEEE Trans. on Aerospace and Electronic System, 2020, 56 (3): 2478- 2488.
doi: 10.1109/TAES.2019.2941104 |
| 27 |
VO B T, VO B N A multi-scan labeled random finite set model for multi-object state estimation. IEEE Trans. on Signal Processing, 2019, 67 (19): 4948- 4963.
doi: 10.1109/TSP.2019.2928953 |
| 28 |
BEARD M, REUTER S, GRANSTROM K, et al Multiple extended target tracking with labeled random finite sets. IEEE Trans. on Signal Processing, 2016, 64 (7): 1638- 1653.
doi: 10.1109/TSP.2015.2505683 |
| 29 |
LIN S F Robust pitch estimation and tracking for speakers based on sub-band encoding and the generalized labeled multi-bernoulli filter. IEEE Trans. on Audio, Speech, and Language Processing, 2019, 27 (4): 827- 841.
doi: 10.1109/TASLP.2019.2898818 |
| 30 | VO B N, VO B T, BEARD M Multi-sensor multi-object tracking with the generalized labeled multi-Bernoulli filter. IEEE Trans. on Signal Processing, 2019, 67 (23): 5951- 5967. |
| 31 |
PASHA S A, VO B N, TUAN H D, et al A Gaussian mixture PHD filter for jump Markov system models. IEEE Trans. on Aerospace and Electronic System, 2009, 45 (3): 919- 936.
doi: 10.1109/TAES.2009.5259174 |
| 32 |
WOOD T M Interacting methods for maneuver handling in the GM-PHD filter. IEEE Trans. on Aerospace and Electronic System, 2011, 47 (4): 3021- 3025.
doi: 10.1109/TAES.2011.6034685 |
| 33 |
DUNNE D, KIRUBARAJAN T Multiple model multi-Bernoulli filters for maneuvering targets. IEEE Trans. on Aerospace and Electronic System, 2013, 49 (4): 2679- 2692.
doi: 10.1109/TAES.2013.6621845 |
| 34 |
PUNITHAKUMAR K, KIRUBARAJAN T Multiple models probability hypothesis density filter for tracking maneuvering targets. IEEE Trans. on Aerospace and Electronic System, 2008, 44 (1): 87- 98.
doi: 10.1109/TAES.2008.4516991 |
| 35 |
GEORGESCU R, WILLETT P The multiple model CPHD tracker. IEEE Trans. on Signal Processing, 2012, 60 (4): 1741- 1751.
doi: 10.1109/TSP.2012.2183128 |
| 36 |
YI W, JIANG M, HOSEINNEZHAD R The multiple model Vo-Vo filter. IEEE Trans. on Aerospace and Electronic System, 2017, 53 (2): 1045- 1054.
doi: 10.1109/TAES.2017.2667300 |
| 37 |
CAO C H, ZHAO Y B An efficient implementation of the multiple-model generalized labeled multi-Bernoulli filter for track-before-detect of point targets using image sensor. IEEE Trans. on Aerospace and Electronic Systems, 2021, 57 (6): 4416- 4432.
doi: 10.1109/TAES.2021.3091756 |
| 38 | CAO C H, ZHAO Y B A multiple-model generalized labeled multi-Bernoulli filter based on blocked Gibbs sampling for tracking maneuvering targets. Signal Processing, 2021, 186, 108119. |
| 39 |
JIANG H C, YI W, CUI G L Knowledge-based track-before-detect strategies for fluctuating targets in K-distributed clutter. IEEE Sensors Journal, 2016, 16 (19): 7124- 7132.
doi: 10.1109/JSEN.2016.2597320 |
| 40 |
YI W, JIANG H C, KIRUBARAJAN T Track-before-detect strategies for radar detection in G0-distributed clutter. IEEE Trans. on Aerospace and Electronic Systems, 2017, 53 (5): 2516- 2533.
doi: 10.1109/TAES.2017.2702259 |
| 41 |
JIANG H C, YI W, CUI G L Track-before-detect strategies for range distributed target detection in compound-Gaussian clutter. Signal Processing, 2016, 120, 462- 467.
doi: 10.1016/j.sigpro.2015.09.034 |
| 42 | WEI L, ZHANG X, FAN L. TBD algorithm based on improved randomized hough transfer for dim target detection. Proc. of the 2nd International Conference on Signal Processing Systems, 2000. DOI: 10.1109/ICSPS.2010.5555508. |
| 43 | CAO C H, ZHAO Y B, PANG X J, et al Sequential Monte Carlo cardinalized probability hypothesized density filter based on track-before-detect for fluctuating targets in heavy-tailed clutter. Signal Processing, 2019, 169, 107367. |
| 44 | MCDONALD M, BALAJI B Impact of measurement model mismatch on nonlinear track-before-detect performance for maritime radar surveillance. IEEE of Ocean Engineering, 2011, 36 (4): 602- 614. |
| 45 |
BREKKE E, HALLINGSTAD O, GLATTETRE J Tracking small targets in heavy-tailed clutter using amplitude information. IEEE Journal of Ocean Engineering, 2010, 35 (2): 314- 329.
doi: 10.1109/JOE.2010.2044670 |
| 46 | LI S Q, YI W, KONG L J, et al. Multi-Bernoulli filter based track-before-detect for jump Markov models. Proc. of the IEEE Radar Conference, 2014: 1257−1261. |
| 47 | WANG Z Q, SUN J. Maneuvering target tracking via dynamic-programming based track-before-detect algorithm. Proc. of the CIE International Conference on Radar, 2016. DOI: 10.1109/RADAR.2016.8059558. |
| 48 | LI X Z, WANG S Y, ZHENG D K. A DP-TBD algorithm with adaptive state transition set for maneuvering targets. Proc. of the CIE International Conference on Radar, 2016: 64−68. |
| 49 | BARDEL N, ABBASSI N, DEBOUVRIES F. A Bayesian filtering algorithm in jump Markov systems with application to track-before-detect. Proc. of the IEEE Radar Conference, 2010: 1397−1402. |
| [1] | Cong XU, Zishu HE, Haicheng LIU, Yadan LI. Bayesian track-before-detect algorithm for nonstationary sea clutter [J]. Journal of Systems Engineering and Electronics, 2021, 32(6): 1338-1344. |
| [2] | Zhichao BAO, Qiuxi JIANG, Fangzheng LIU. Multiple model efficient particle filter based track-before-detect for maneuvering weak targets [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 647-656. |
| [3] | Haiwen SUN, Xiaofang XIE. Threat evaluation method of warships formation air defense based on AR(p)-DITOPSIS [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 297-307. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||