
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (3): 769-779.doi: 10.23919/JSEE.2024.000050
• CONTROL THEORY AND APPLICATION • Previous Articles
Weiwei QIN( ), Wenxin GUO(), Chen HU(), Gang LIU(), Tainian SONG()
), Wenxin GUO(), Chen HU(), Gang LIU(), Tainian SONG()
Received:2021-12-14
Online:2024-06-18
Published:2024-06-19
Contact:
Wenxin GUO
E-mail:qww_1982@163.com;gwx_97@163.com;chenh628@hotmail.com;1813923249@qq.com;873512274@qq.com
About author:Supported by:Weiwei QIN, Wenxin GUO, Chen HU, Gang LIU, Tainian SONG. Kinematic calibration under the expectation maximization framework for exoskeletal inertial motion capture system[J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 769-779.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
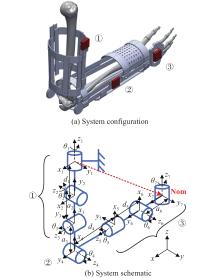
Fig 1
3D model of 7-DoFs EI-MoCap system and its coordinate system"
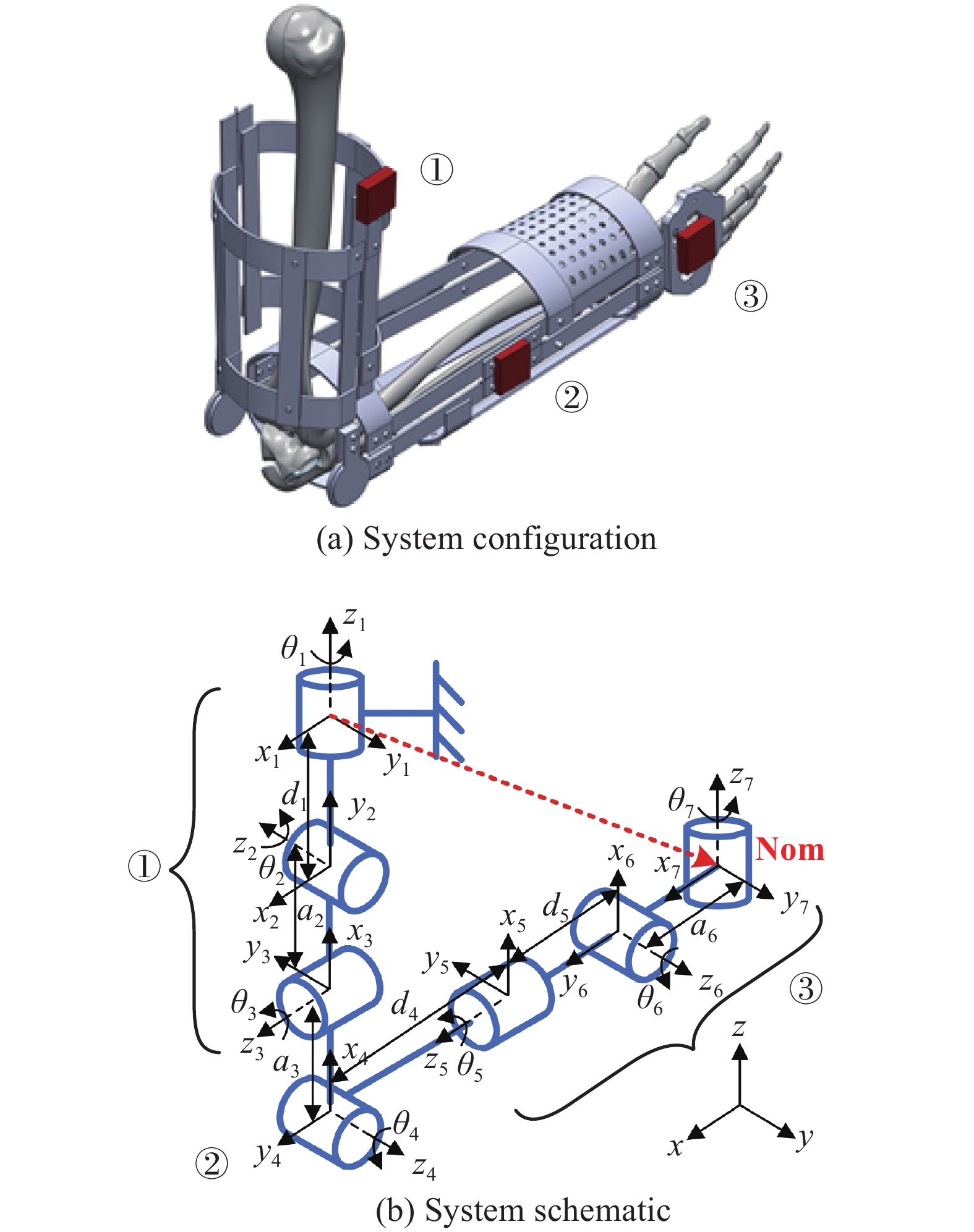
Table 1
Standard D-H parameters of EI-MoCap system"
| 1 | 0.04 | 270 | 0 | 0 | |
| 2 | 0.04 | 90 | 0 | 90 | |
| 3 | 0.431 | 90 | 0 | 0 | |
| 4 | 0.244 | −90 | 0 | 0 | |
| 5 | 0 | 90 | 0 | 0 | |
| 6 | 0 | 90 | 0 | 90 | |
| 7 | 0 | 90 | 0 | 0 |
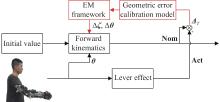
Fig 2
Flow chart of the kinematic calibration method"
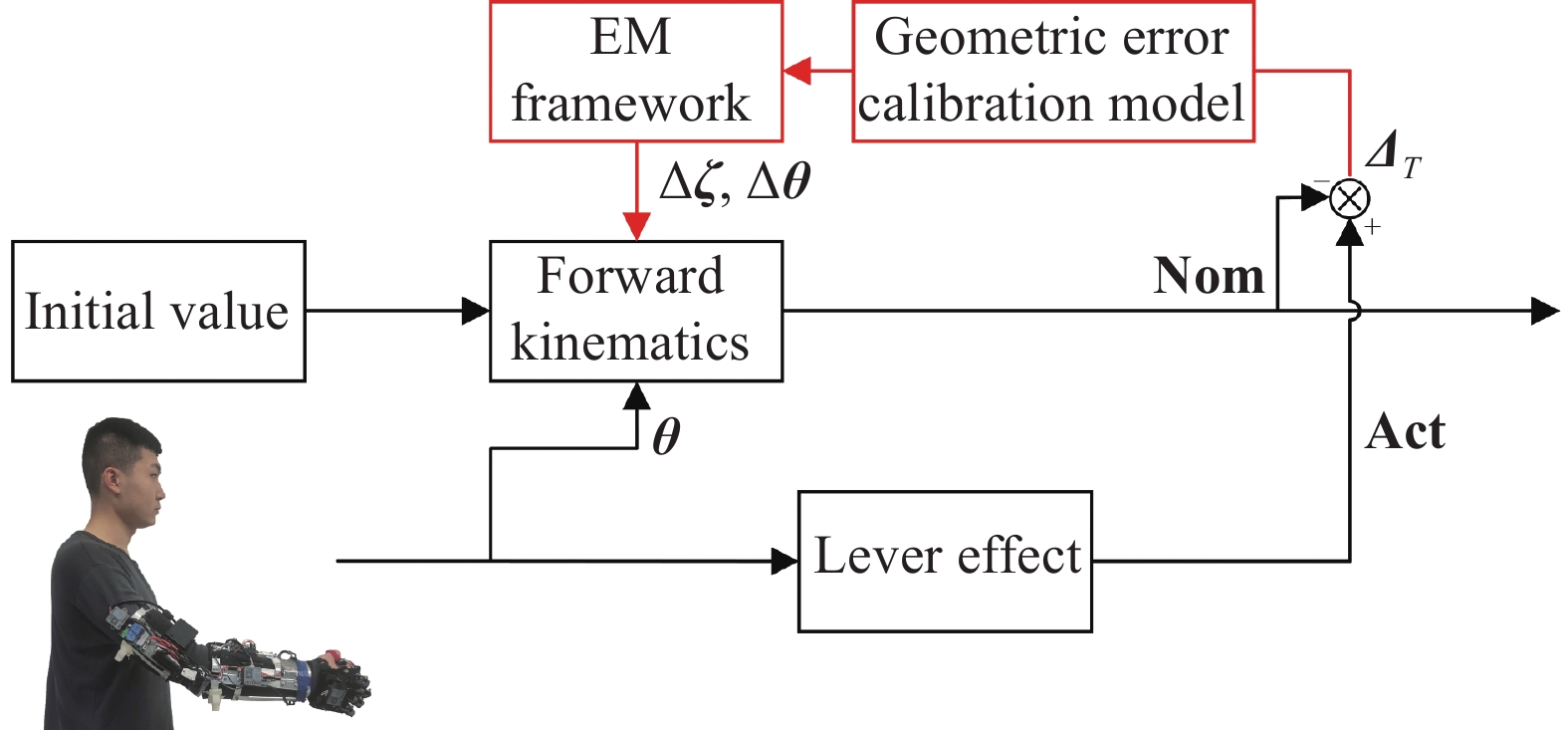
Table 2
Geometric parameter range of each joint m"
| Parameter | Min | Max |
| 0.02 | 0.06 | |
| 0.02 | 0.06 | |
| 0.377 | 0.485 | |
| 0.211 | 0.267 |
Table 3
Rotation range of each joint (°)"
| Parameter | Initial | Final |
| −90 | 90 | |
| −120 | 30 | |
| −10 | 100 | |
| 0 | 150 | |
| 30 | −20 | |
| 40 | −30 | |
| −90 | 90 |
Table 4
Hypothetical D-H parameters of the EI-MoCap system"
| 1 | 0.03 | 270 | 0.03 | 0 | |
| 2 | 0.05 | 93 | 0.02 | 90 | |
| 3 | 0.401 | 90 | 0 | 0 | |
| 4 | 0.264 | −95 | 0 | 0 | |
| 5 | 0.02 | 90 | 0.01 | 0 | |
| 6 | 0.01 | 92 | 0 | 90 | |
| 7 | 0 | 90 | 0 | 0 |
Table 5
Calibration result under the single LS method"
| 1 | −0.0102 | 0.0005 | 0.0302 | 0.0004 |
| 2 | 0.0080 | 0.0514 | 0.0183 | 0.0010 |
| 3 | −0.0280 | 0.0002 | −0.0003 | −0.0010 |
| 4 | 0.0180 | −0.0856 | −0.0021 | −0.0013 |
| 5 | 0.0203 | 0.0010 | 0.0104 | −0.0005 |
| 6 | 0.0100 | 0.0336 | −0.0010 | 0.0004 |
| 7 | 0.0008 | −0.0001 | −0.0014 | −0.0016 |
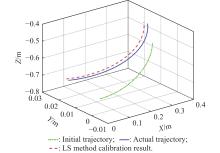
Fig 3
Effect of the single LS method"
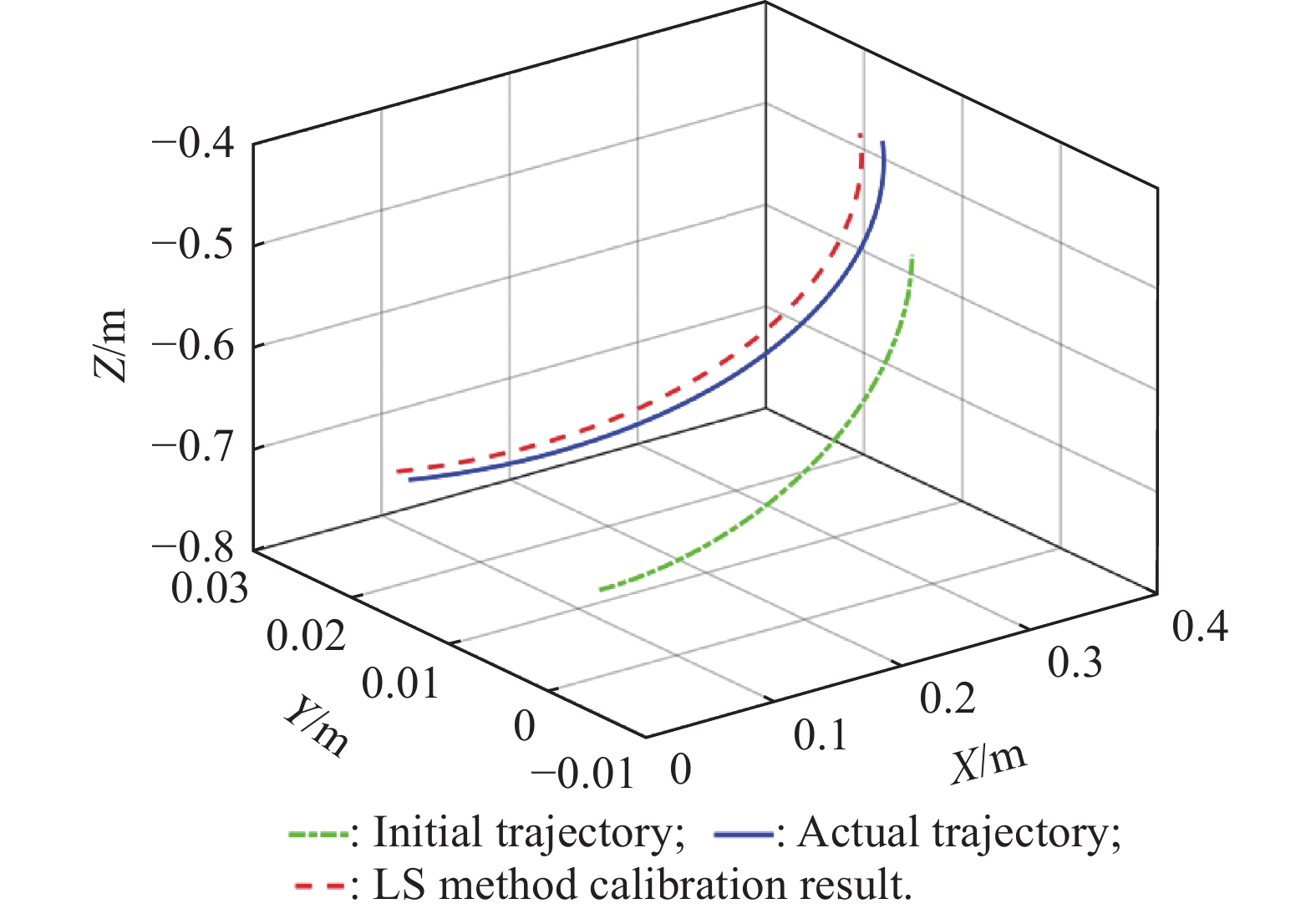
Table 6
Calibration result under the EM framework"
| Parameter | |||||||
| Mean value | −0.0877 | −0.0219 | −0.8644 | 0.5719 | −0.1644 | −0.1369 | −0.2155 |
| Variance | 0.0004 | 0.0005 | 0.0261 | 0.0114 | 0.0001 | 0.0015 | 0.0006 |
| Responsibility | 0.0321 | 0.0134 | 0.0000 | 0.0000 | 0.5366 | 0.0001 | 0.4179 |
Fig 4
Effect of the EM algorithm"
Fig 5
EM algorithm convergence verification"
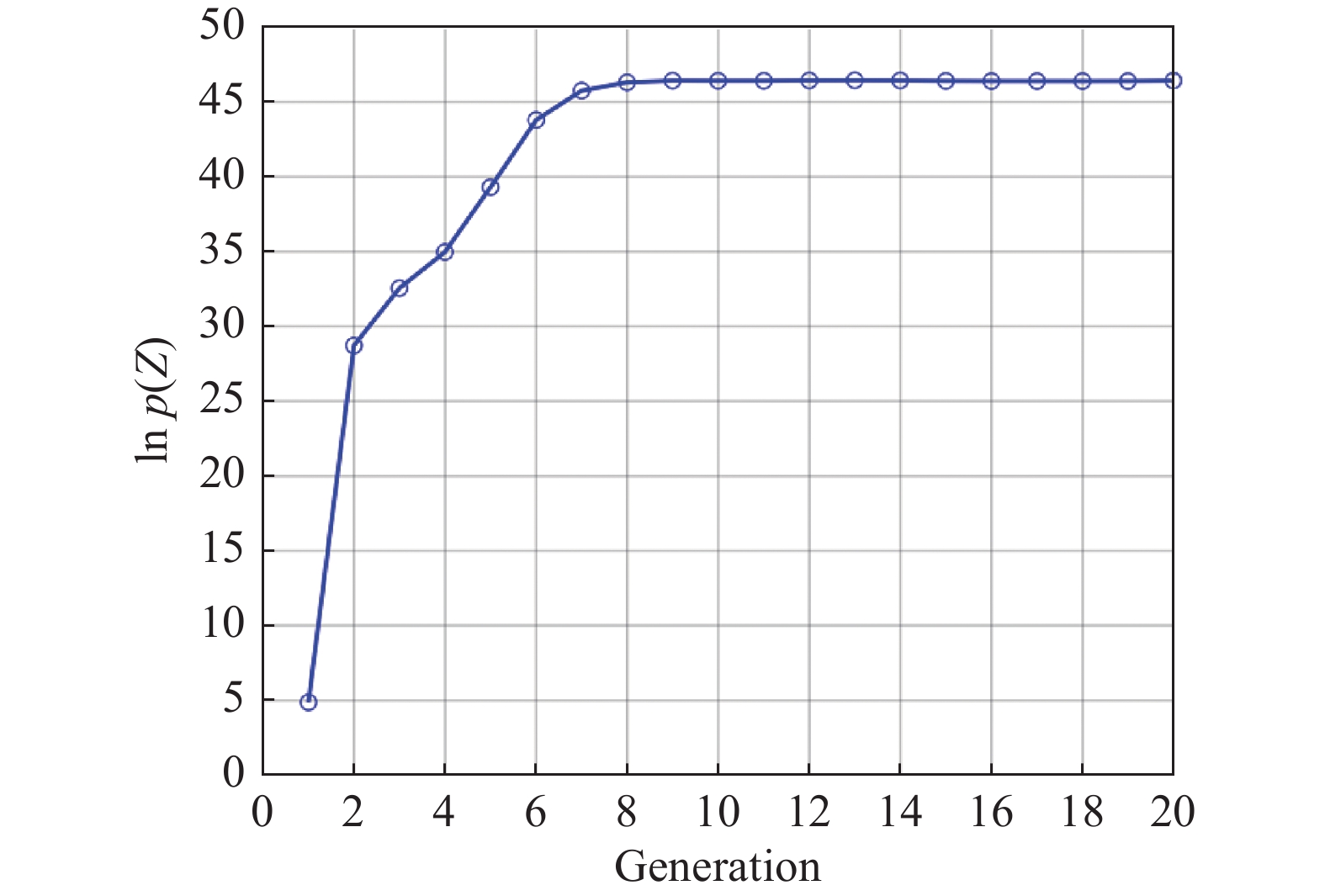

Fig 6
EI-MoCap system"
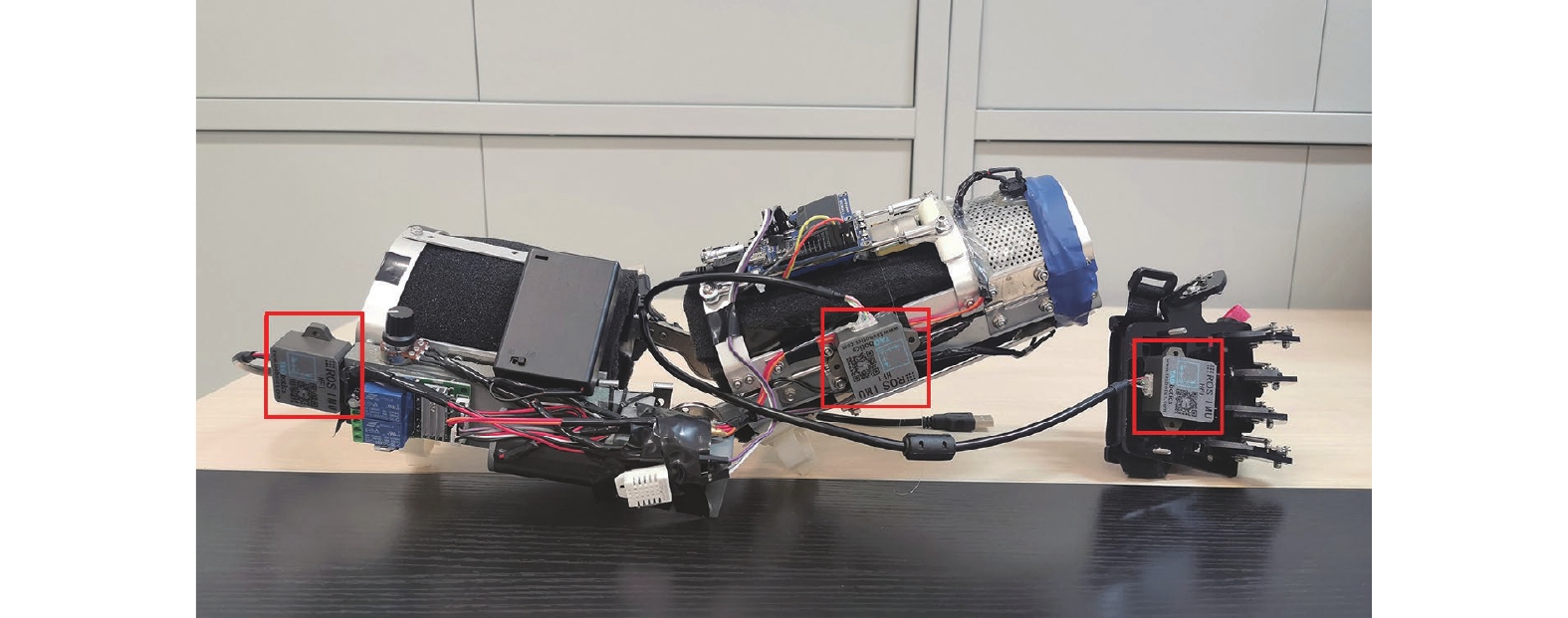
Table 7
Calibration result under the LS method"
| 1 | −0.0099 | −0.0004 | 0.0300 | −0.0002 |
| 2 | 0.0106 | 0.0518 | 0.0199 | 0.0004 |
| 3 | −0.0304 | 0.0006 | 0.0001 | −0.0006 |
| 4 | 0.0183 | −0.0862 | −0.0008 | 0.0001 |
| 5 | 0.0203 | 0.0003 | 0.0093 | 0.0005 |
| 6 | 0.0091 | 0.0351 | −0.0002 | −0.0005 |
| 7 | −0.0004 | 0.0001 | 0.0101 | 0.0005 |
Table 8
Kinematic parameters calibrated by the EM algorithm"
| Parameter | Mean value | Variance | Responsibility |
| 0.0396 | 0.0001 | 0.3409 | |
| 0.2752 | 0.0002 | 0.0001 | |
| −1.1635 | 0.0444 | 0.0000 | |
| −0.2356 | 0.0093 | 0.0000 | |
| 0.3317 | 0.0159 | 0.0000 | |
| 0.0787 | 0.0016 | 0.6258 | |
| −0.3303 | 0.0002 | 0.0332 |
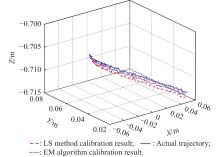
Fig 7
Effect of calibration under the EM framework"
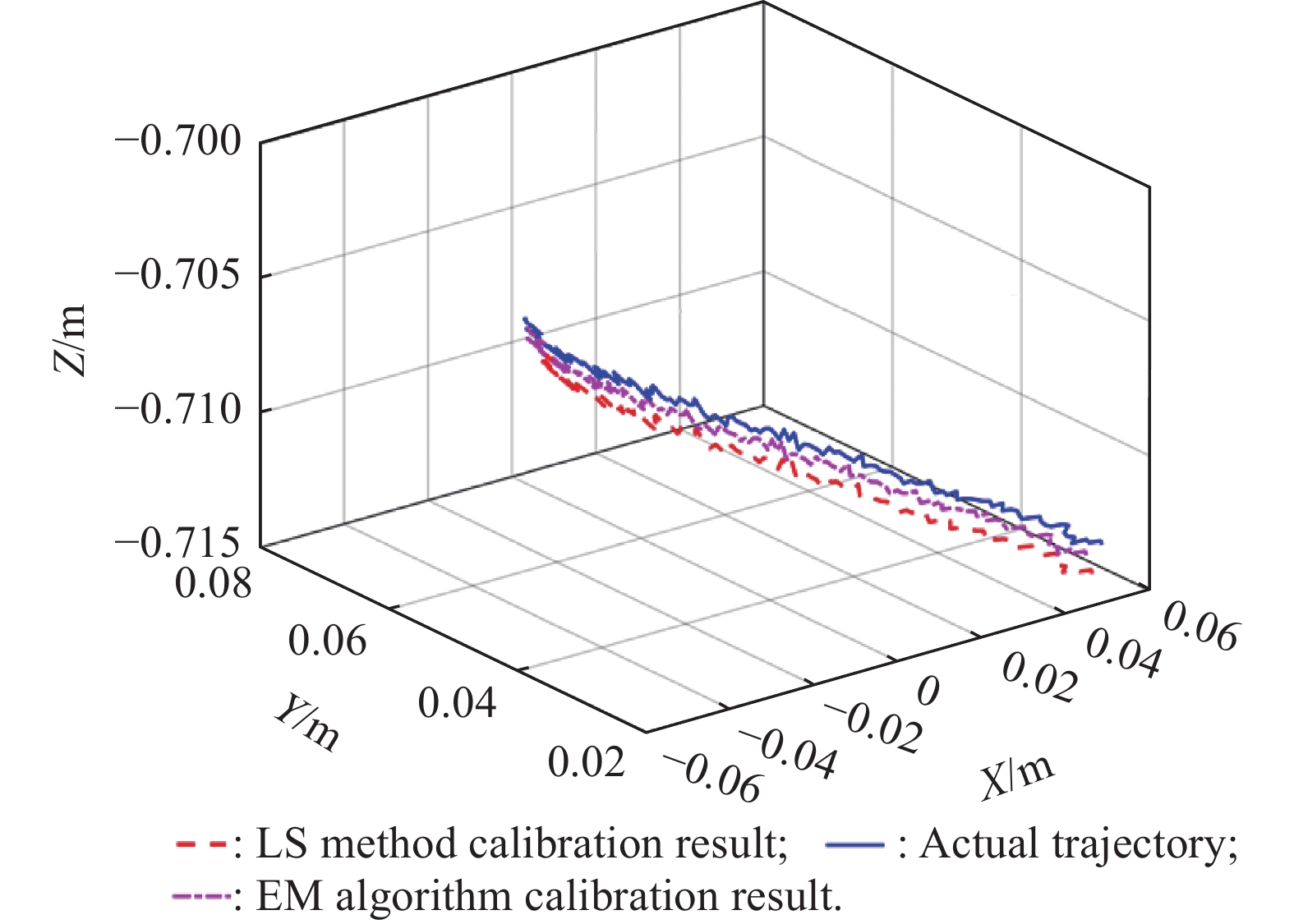
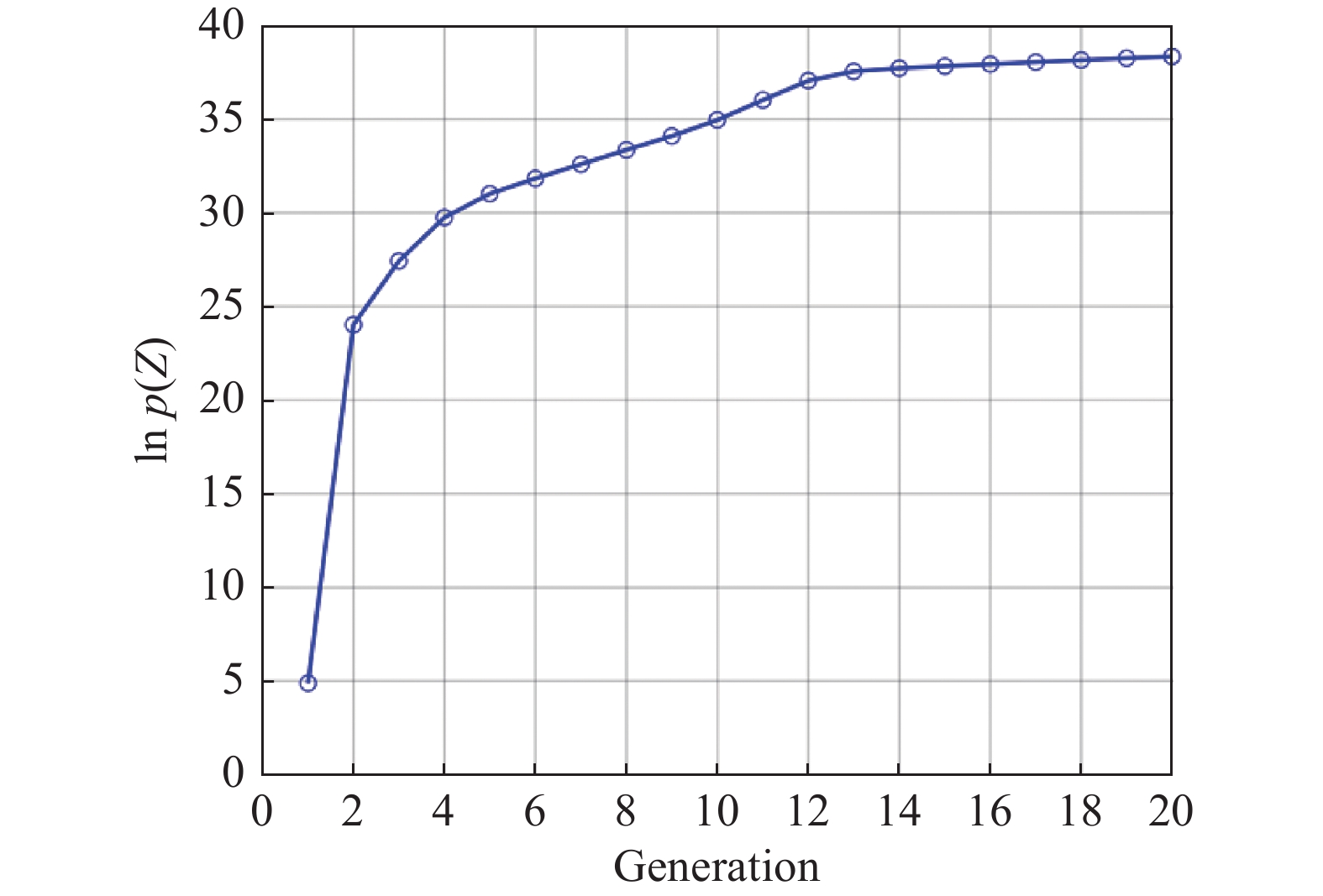
Fig 8
Convergence verification under the EM framework"
| 1 |
NASER A, LOTFI A, MWANJE M D, et al Privacy-preserving, thermal vision with human in the loop fall detection alert system. IEEE Trans. on Human-Machine Systems, 2023, 53 (1): 164- 175.
doi: 10.1109/THMS.2022.3203021 |
| 2 |
GAO L, ZHANG G F, YU B, et al Wearable human motion posture capture and medical health monitoring based on wireless sensor networks. Measurement, 2020, 166, 108252.
doi: 10.1016/j.measurement.2020.108252 |
| 3 |
AMAT A Z, ADIANI D, TAUSEEF M, et al Design of a desktop virtual reality-based collaborative activities simulator to support teamwork in workplace settings for autistic adults. IEEE Trans. on Neural Systems and Rehabilitation Engineering, 2023, 31, 2184- 2194.
doi: 10.1109/TNSRE.2023.3271139 |
| 4 |
DING Z Y, LOO J Y, NURZAMAN S G, et al A zero-shot soft sensor modeling approach using adversarial learning for robustness against sensor fault. IEEE Trans. on Industrial Informatics, 2023, 19 (4): 5891- 5901.
doi: 10.1109/TII.2022.3187708 |
| 5 |
DONG Z H, LUCES J V S, RAVANKAR A A, et al A performance evaluation of overground gait training with a mobile body weight support system using wearable sensors. IEEE Sensors Journal, 2023, 23 (11): 12209- 12223.
doi: 10.1109/JSEN.2023.3269031 |
| 6 | SCOTT B, CHADWICK E, MCINNES M, et al Assessing single camera markerless motion capture during upper limb activities of daily living. Gait & Posture, 2023, 106 (1): S184. |
| 7 | FAREWIK L G, OLSSON F, DESTRO A, et al Markerless motion capture using iPad pro with LiDAR camera adjusted with artificial neural networks. Gait & Posture, 2022, 97 (1): S72- S73. |
| 8 |
USLU T, GEZGIN E, OZBEK S, et al Utilization of low cost motion capture cameras for virtual navigation procedures: performance evaluation for surgical navigation. Measurement, 2021, 181, 109624.
doi: 10.1016/j.measurement.2021.109624 |
| 9 |
PARK K W, CHOI J, KONG K Data-driven modeling for gait phase recognition in a wearable exoskeleton using estimated forces. IEEE Trans. on Robotics, 2023, 39 (4): 3072- 3086.
doi: 10.1109/TRO.2023.3262108 |
| 10 |
WANG W T, LI R, DIEKEL Z M, et al Controlling object hand-over in human-robot collaboration via natural wearable sensing. IEEE Trans. on Human-Machine Systems, 2019, 49 (1): 59- 71.
doi: 10.1109/THMS.2018.2883176 |
| 11 |
El-GOHARY M, MCNAMES J Shoulder and elbow joint angle tracking with inertial sensors. IEEE Trans. on Biomedical Engineering, 2012, 59 (9): 2635- 2641.
doi: 10.1109/TBME.2012.2208750 |
| 12 | LU C H, DAI Z Y, JING L Measurement of hand joint angle using inertial-based motion capture system. IEEE Trans. on Instrumentation and Measurement, 2023, 72, 9503211. |
| 13 |
WANG Z T, GAO F, WU Z H, et al A method for calculating lower extremity anatomical landmark trajectories based on inertial motion capture data. IEEE Trans. on Neural Systems and Rehabilitation Engineering, 2023, 31, 2734- 2746.
doi: 10.1109/TNSRE.2023.3285924 |
| 14 |
LAMBRECHT J M, KIRSCH R F Miniature low-power inertial sensors: promising technology for implantable motion capture systems. IEEE Trans. on Neural Systems and Rehabilitation Engineering, 2014, 22 (6): 1138- 1147.
doi: 10.1109/TNSRE.2014.2324825 |
| 15 |
QIU S, WANG Z L, ZHAO H Y, et al Using distributed wearable sensors to measure and evaluate human lower limb motions. IEEE Trans. on Instrumentation and Measurement, 2016, 65 (4): 939- 950.
doi: 10.1109/TIM.2015.2504078 |
| 16 | ROBERT-LACHAINE X, PARENT G, FUENTES A, et al Inertial motion capture validation of 3D knee kinematics at various gait speed on the treadmill with a double-pose calibration. Gait & Posture, 2020, 77, 132- 137. |
| 17 |
MIEZAL M, TAETZ B, BLESER G On inertial body tracking in the presence of model calibration errors. Sensors, 2016, 16 (7): 1132.
doi: 10.3390/s16071132 |
| 18 | KIM M, LEE D Wearable inertial sensor based parametric calibration of lower-limb kinematics. Sensors and Actuators A: Physical, 2017, 265 (1): 280- 296. |
| 19 |
JIN X, HUANG B, SHOOK D S Multiple model LPV approach to nonlinear process identification with EM algorithm. Journal of Process Control, 2011, 21 (1): 182- 193.
doi: 10.1016/j.jprocont.2010.11.008 |
| 20 |
ZHAO Y J, FATEHI A, HUANG B Robust estimation of ARX models with time varying time delays using variational bayesian approach. IEEE Trans. on Cybernetics, 2018, 48 (2): 532- 542.
doi: 10.1109/TCYB.2016.2646059 |
| 21 | SUN Y F, XU X Calibration of MEMS triaxial accelerometers based on the maximum likelihood estimation method. Mathematical Problems in Engineering, 2020, 2020, 4617365. |
| 22 |
ZHANG X G, LI P, TU R, et al Automatic calibration of process noise matrix and measurement noise covariance for multi-GNSS precise point positioning. Mathematics, 2020, 8 (4): 502.
doi: 10.3390/math8040502 |
| 23 | DENG Y H, CHANG J Y Human-like posture correction for seven degree of freedom robotic arm. Journal of Mechanisms and Robotics, 2022, 14 (2): 024501. |
| 24 |
SHINTEMIROV A, TAUNYAZOV T, OMARALI B, et al An open-source 7-DoF wireless human arm motion-tracking system for use in robotics research. Sensors, 2020, 20 (11): 3082.
doi: 10.3390/s20113082 |
| 25 | TAUNYAZOV T, OMARALI B, SHINTEMIROV A. A novel low-cost 4-DoF wireless human arm motion tracker. Proc. of the IEEE International Conference on Biomedical Robotics and Biomechatronics, 2016: 157−162. |
| 26 |
ZAHEDI A, WANG Y S, LAU N, et al A bamboo-inspired exoskeleton based on carbon fiber for shoulder and elbow joints. IEEE Trans. on Medical Robotics and Bionics, 2023, 5 (2): 375- 386.
doi: 10.1109/TMRB.2023.3269863 |
| 27 | WANG Z Y, LIU Y, WANG X Y, et al Field calibration method for industrial robots based on single position sensitive device. IEEE Trans. on Instrumentation and Measurement, 2023, 72, 7506112. |
| 28 |
WU C A kinematic cad tool for the design and control of a robot manipulator. International Journal of Robotics Research, 1984, 3 (1): 58- 67.
doi: 10.1177/027836498400300105 |
| [1] | Lili SUN, Yunhe CAO, Wenhua WU, Yutao LIU. A multi-target tracking algorithm based on Gaussian mixture model [J]. Journal of Systems Engineering and Electronics, 2020, 31(3): 482-487. |
| [2] | Peng Xu, Jinkuan Wang, and Feng Qi. Improved H-infinity channel estimator based on EM for MIMO-OFDM systems [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 572-578. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||