
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (3): 793-804.doi: 10.23919/JSEE.2024.000051
• CONTROL THEORY AND APPLICATION • Previous Articles
Chenchao DAI1( ), Hongfu QIANG1(), Degang ZHANG2,3(), Shaolei HU4(), Baichun GONG2,*()
), Hongfu QIANG1(), Degang ZHANG2,3(), Shaolei HU4(), Baichun GONG2,*()
Received:2023-03-08
Online:2024-06-18
Published:2024-06-19
Contact:
Baichun GONG
E-mail:dai32917zr@sina.com;Qiang@263.net;zdg765049828@qq.com;hushaolei028@163.com;baichun.gong@nuaa.edu.cn
About author:Supported by:Chenchao DAI, Hongfu QIANG, Degang ZHANG, Shaolei HU, Baichun GONG. Relative orbit determination algorithm of space targets with passive observation[J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 793-804.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
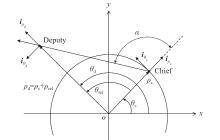
Fig 1
Cylindrical coordinates in ${\boldsymbol{x}} $-${\boldsymbol{y}} $ plane [48]"
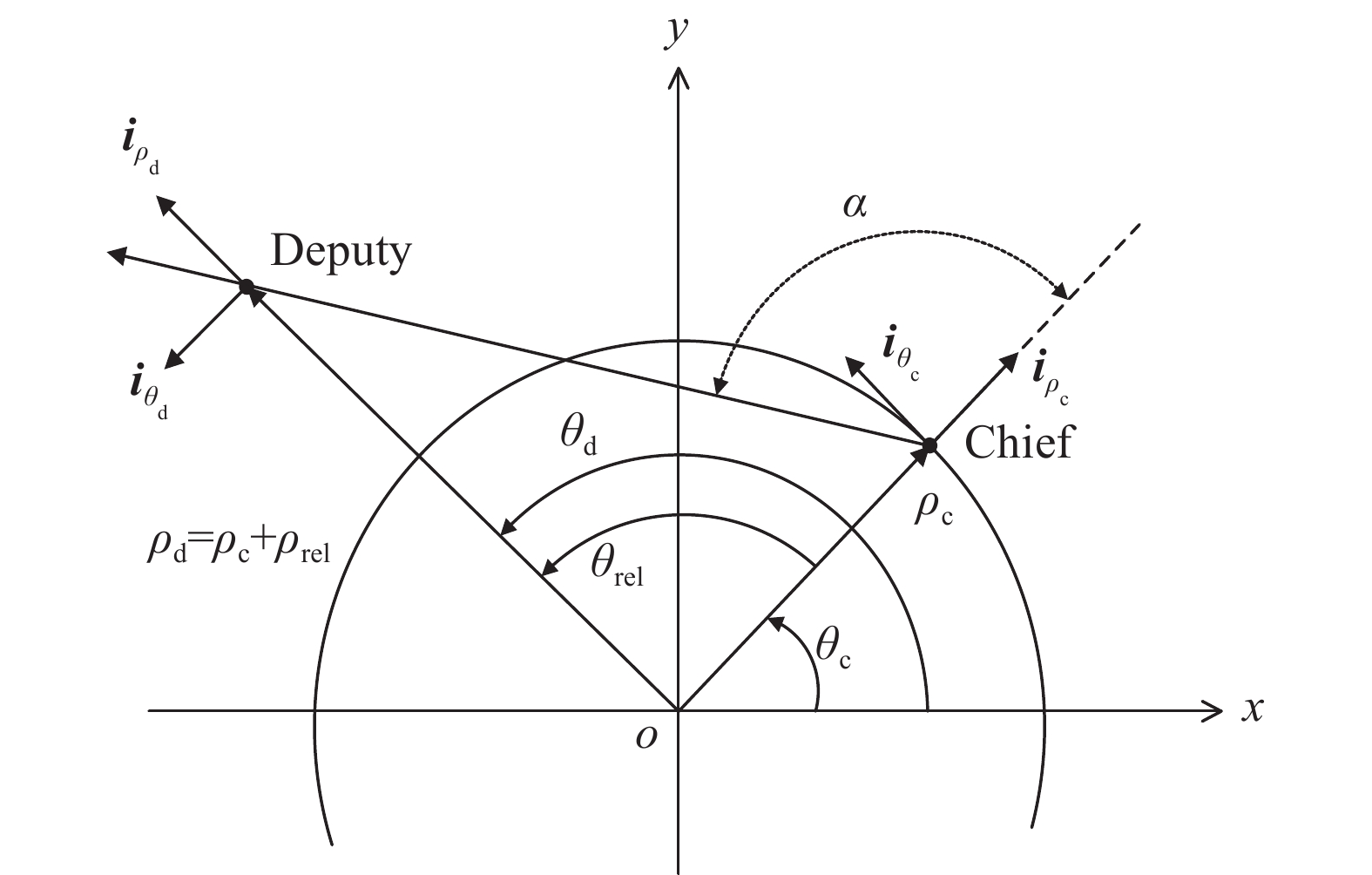
Fig 2
Geometry in cylindrical coordinates"
Table 1
Parameters setting of Chief and Deputy"
| Orbital element | Chief | Deputy | ||
| Case 1 | Case 2 | Case 3 | ||
| Semimajor axis/km | 42164.17 | 42264.17 | 42264.17 | 42364.17 |
| Eccentricity | 0 | 0.0001 | 0.0001 | 0.0001 |
| Inclination/(°) | 0 | 0.00002 | 0.00002 | 0.00002 |
| Right ascension of ascending node/(°) | 0 | 0 | 0 | 0 |
| Argument of perigee/(°) | 0 | 0 | 0 | 0 |
| True anomaly/(°) | 322.7645 | 324.1151 | 325.46 | 324.093 |
Table 2
Setting of feasible solution space guess"
| State | Minimum | Maximum |
| 100000 | 3000000 | |
| 0 | 0. 1 | |
| −2000 | 2000 | |
| −2 | 2 | |
| −0.00001 | 0.00001 | |
| −20 | 20 |
Fig 3
Convergence curves of optimization function"
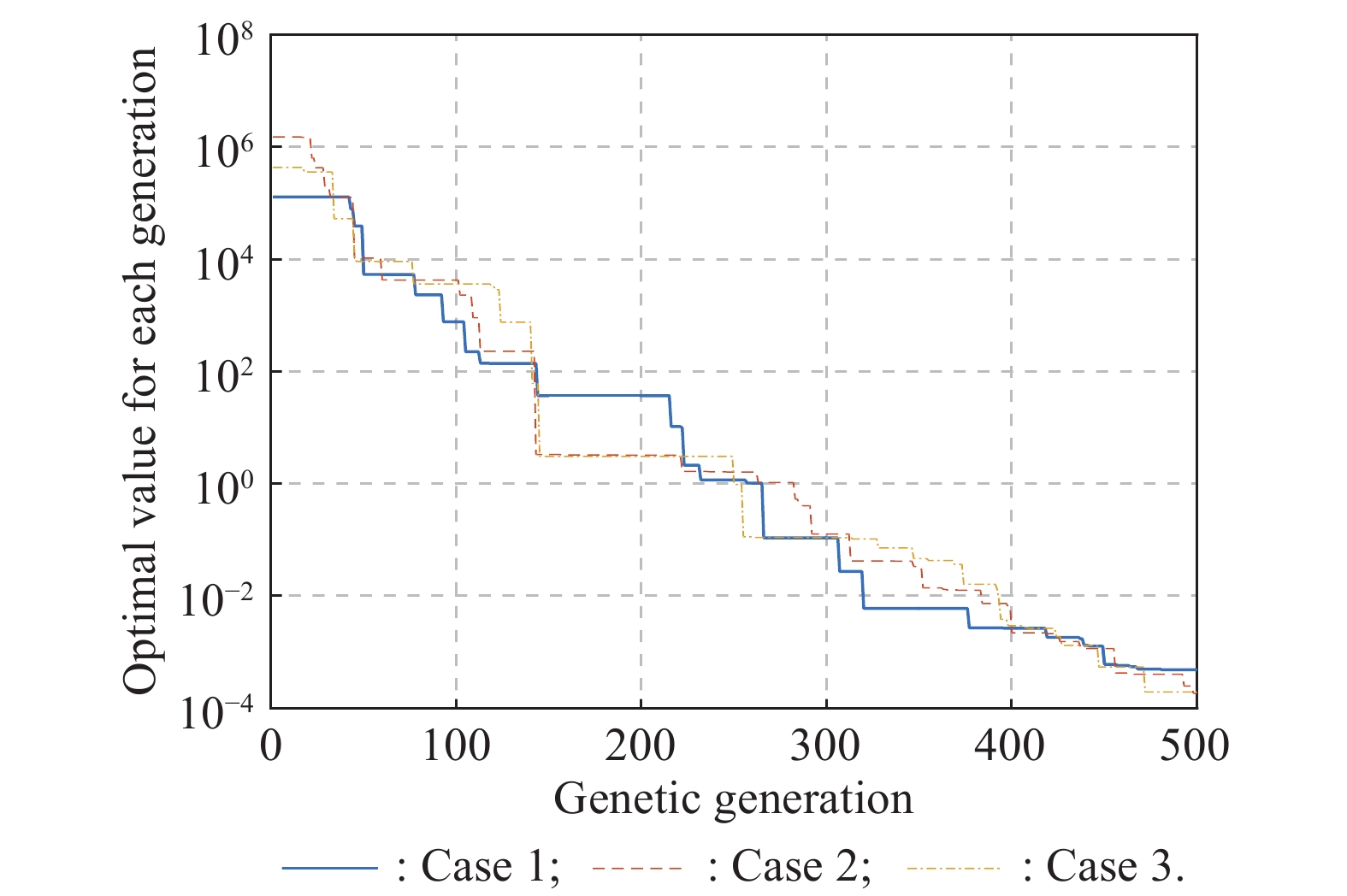
Table 3
Optimization results for Case 1"
| State | Run #1 | Run #2 | Run #3 | Run #4 |
| Sel_best | 0.000482 | 0.003928 | 0.001034 | 0.000814 |
| 99342.4 | 183869.0 | 175715.5 | 130469.7 | |
| 0.023193 | 0.040047 | 0.038522 | 0.029747 | |
| 0.007945 | 0.007754 | −0.059337 | −0.016427 | |
| −0.530838 | −1.018791 | −0.876775 | −0.525139 | |
| −2.483 7 e−07 | −4.605 3 e−07 | −4.391 6 e−07 | −3.285 6 e−07 | |
| −3.743 0 e-06 | 4.148 0 e−06 | 1.547 0 e−05 | 5.170 7 e−06 | |
| Error/% | 1.6019 | 70.1985 | 63.6927 | 26.2843 |
Table 4
Optimization results for Case 2"
| State | Run #1 | Run #2 | Run #3 | Run #4 |
| Sel_best | 0.000297 | 0.000149 | 0.000193 | 0.000132 |
| 129523.9 | 108668.7 | 128224.8 | 120088.4 | |
| 0.055997 | 0.049735 | 0.055685 | 0.053446 | |
| −0.041245 | 0.008858 | −0.022159 | 0.006543 | |
| −0.109385 | −0.368671 | −0.230537 | 0.241181 | |
| −3.455 5 e−07 | −2.744 5 e−07 | −3.313 3 e−07 | −3.302 6 e−07 | |
| 5.887 4 e−06 | −1.634 8 e−05 | 1.297 9 e−05 | −1.354 8 e−05 | |
| Error/% | 19.0946 | 5.7362 | 18.4289 | 13.6489 |
Table 5
Optimization results for Case 3"
| State | Run #1 | Run #2 | Run #3 | Run #4 |
| Sel_best | 0.000154 | 0.000251 | 0.000062 | 0.000290 |
| 238250.4 | 187168.5 | 200431.8 | 212928.5 | |
| 0.021730 | 0.020696 | 0.023536 | 0.024695 | |
| 0.004079 | 0.020357 | −0.012792 | −0.022222 | |
| −0.816903 | −0.321888 | −0.570304 | 0.201456 | |
| −6.953 6 e−07 | −4.822 3 e−07 | −5.037 8 e−07 | −5.603 5 e−07 | |
| −1.557 9 e−06 | −1.325 0 e−06 | −4.368 8 e−06 | −1.963 6 e−06 | |
| Error/% | 4.1185 | 5.8605 | 1.4823 | 6.5278 |
Table 6
Parameters setting of Chief and Deputy"
| Orbital element | Chief | Deputy |
| Semi major axis/m | 6731140 | 6771140 |
| Eccentricity | 0.000212 | 0.000212 |
| Inclination/(°) | 41.471 | 41.471 |
| Right ascension of ascending node/(°) | 281.9962 | 281.9962 |
| Argument of perigee/(°) | 349.1571 | 349.1571 |
| True anomaly/(°) | 269.3134 | 277.3134 |
Table 7
Setting of feasible solution space guess"
| Relative state | Minimum | Maximum |
| 10000 | 180000 | |
| −0. 1 | 0. 1 | |
| −2000 | 2000 | |
| −20 | 20 | |
| −0.00001 | 0.00001 | |
| −20 | 20 |
Table 8
Percentage error of IROD solutions %"
| Case | Run #1 | Run #2 | Run #3 | Run #4 | Run #5 | Run #6 | Run #7 | Run #8 | Run #9 | Run #10 |
| 1 | 10.5 | 18.5 | 11.4 | 12.1 | 14.3 | 16.7 | 1.7 | 2.9 | 0.4 | 0.9 |
| 2 | 13.0 | 14.0 | 14.5 | 16.9 | 7.6 | 8.4 | 16.4 | 9.0 | 20.8 | 19.6 |
| 3 | 3.3 | 4.2 | 22.1 | 11.9 | 14.3 | 19.9 | 0.3 | 8.8 | 3.8 | 28.5 |
| 4 | 1.2 | 2.7 | 4.0 | 12.8 | 0.4 | 12.9 | 33.3 | 7.3 | 30.1 | 36.9 |
| 5 | 1.0 | 3.5 | 10.3 | 13.4 | 13.3 | 14.5 | 2.3 | 34.6 | 12.1 | 12.0 |
| 6 | 21.3 | 25.3 | 1.1 | 30.6 | 5.8 | 6.4 | 22.1 | 5.5 | 5.6 | 29.5 |
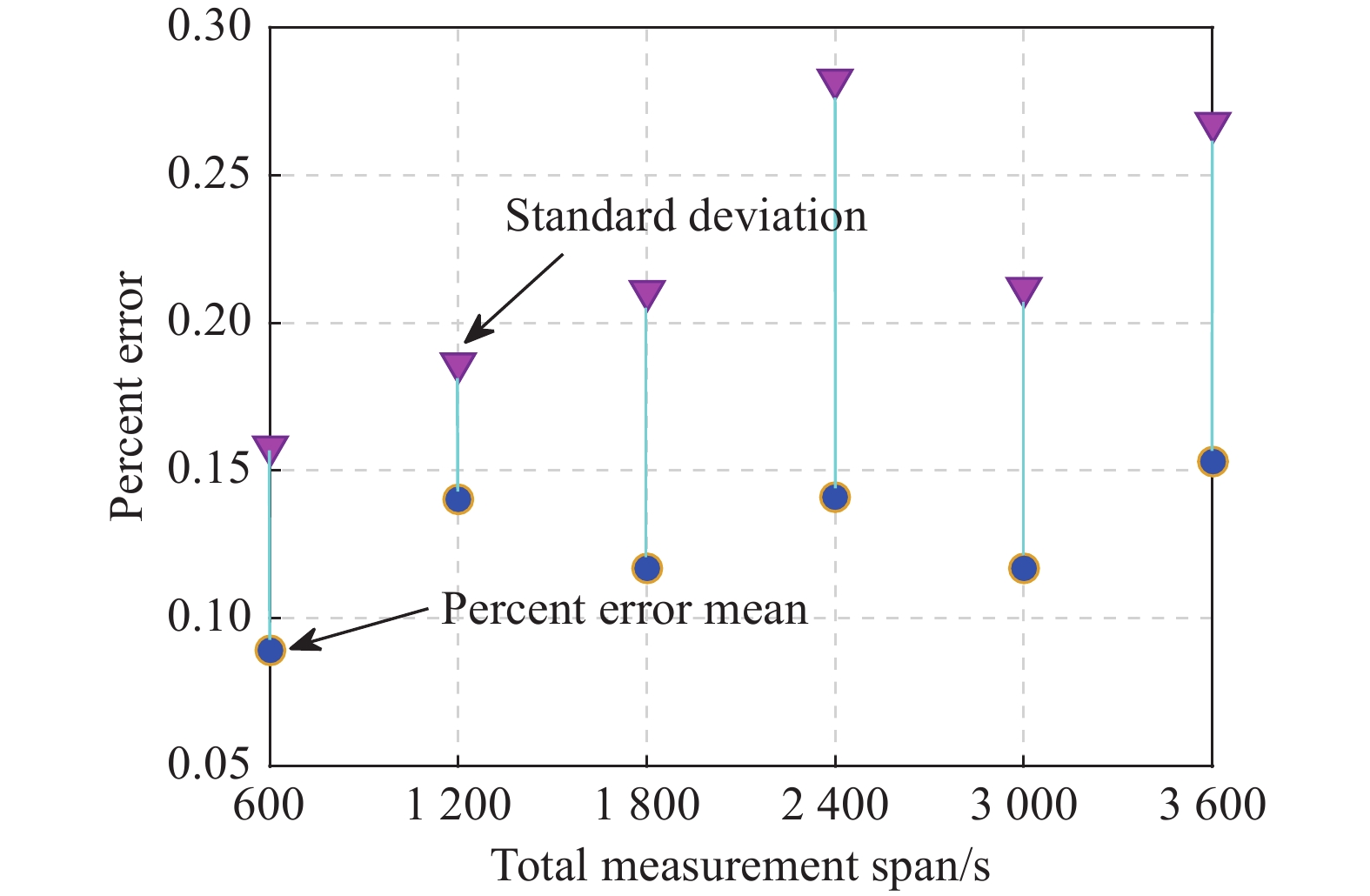
Fig 4
Statistics for LEO simulation cases"
| 1 |
GONG B C, WANG S, LI S, et al Review of space relative navigation based on angles-only measurements. Astrodynamics, 2023, 7 (2): 131- 152.
doi: 10.1007/s42064-022-0152-2 |
| 2 |
GAIAS G, ARDAENS J S In-orbit experience and lessons learned from the AVANTI experiment. Acta Astronautica, 2018, 153, 383- 393.
doi: 10.1016/j.actaastro.2018.01.042 |
| 3 |
D’AMICO S, ARDAENS J, GAIAS G, et al Noncooperative rendezvous using angles-only optical navigation: system design and flight results. Journal of Guidance, Control, and Dynamics, 2013, 36 (6): 1576- 1595.
doi: 10.2514/1.59236 |
| 4 | FLORES-ABAD A, MA O, PHAM K, et al A review of space robotics technologies for on-orbit servicing. Progress in Aerospace Sciences, 2014, 68, 1- 26. |
| 5 | DAVID B. The phoenix project. https://www.unoosa.org/pdf/pres/stsc2013/tech-11E.pdf. |
| 6 | CHARI R Autonomous orbital rendezvous using angles-only navigation. Cambridge: Massachusetts Institute of Technology, 2012. |
| 7 |
CHEN T, XU S J Approach guidance with double-line-of-sight measuring navigation constraint for autonomous rendezvous. Journal of Guidance, Control, and Dynamics, 2011, 34 (3): 678- 687.
doi: 10.2514/1.52963 |
| 8 |
HIPPELHEUSER J, ELGOHARY T A Inertial space-based orbit estimation: a new measurement model for multiple observers. Acta Astronautica, 2021, 181, 717- 732.
doi: 10.1016/j.actaastro.2020.05.033 |
| 9 | HIPPELHEUSER J, ELGOHARY T. A novel approach for initial orbit determination for space-based observation networks. Proc. of the 3rd IAA Conference on Space Situational Awareness, 2022: IAA-ICSSA-20-00-19. |
| 10 |
TASIF T H, HIPPELHEUSER J E, ELGOHARY T A Analytic continuation extended Kalman filter framework for perturbed orbit estimation using a network of space-based observers with angles-only measurements. Astrodynamics, 2022, 6 (2): 161- 187.
doi: 10.1007/s42064-022-0138-0 |
| 11 |
LEGRAND K, DEMARS K, PERNICKA H Bearings-only initial relative orbit determination. Journal of Guidance, Control, and Dynamics, 2015, 38 (9): 1699- 1713.
doi: 10.2514/1.G001003 |
| 12 |
WANG Z W, GONG B C, YUAN Y H, et al Incomplete information pursuit-evasion game control for a space non-cooperative target. Aerospace, 2021, 8 (8): 211.
doi: 10.3390/aerospace8080211 |
| 13 |
ANDREWS B A, GELLER D K Analysis of angles-only hybrid space-based/ground-based approach for geosynchronous orbit catalog maintenance. The Journal of the Astronautical Sciences, 2022, 69, 473- 510.
doi: 10.1007/s40295-022-00313-3 |
| 14 |
WOFFINDEN D C, GELLER D K Observability criteria for angles-only navigation. IEEE Trans. on Aerospace and Electronic Systems, 2009, 45 (3): 1194- 1208.
doi: 10.1109/TAES.2009.5259193 |
| 15 |
WOFFINDEN D C, GELLER D K Optimal orbital rendezvous maneuvering for angles-only navigation. Journal of Guidance, Control, and Dynamics, 2009, 32 (4): 1382- 1387.
doi: 10.2514/1.45006 |
| 16 |
GRZYMISCH J, FICHTER W Observability criteria and unobservable maneuvers for in-orbit bearings-only navigation. Journal of Guidance, Control, and Dynamics, 2014, 37 (4): 1250- 1259.
doi: 10.2514/1.62476 |
| 17 |
GRZYMISCH J, FICHTER W Analytic optimal observability maneuvers for in-orbit bearings-only rendezvous. Journal of Guidance, Control, and Dynamics, 2014, 37 (5): 1658- 1664.
doi: 10.2514/1.G000612 |
| 18 |
GRZYMISCH J, FICHTER W Optimal rendezvous guidance with enhanced bearings-only observability. Journal of Guidance, Control, and Dynamics, 2015, 38 (6): 1131- 1140.
doi: 10.2514/1.G000822 |
| 19 |
ANJALY P, RATNOO A Observability enhancement of maneuvering target with bearings-only information. Journal of Guidance, Control, and Dynamics, 2018, 41 (1): 184- 198.
doi: 10.2514/1.G003003 |
| 20 |
PI J, BANG H Trajectory design for improving observability of angles-only relative navigation between two satellites. The Journal of the Astronautical Sciences, 2014, 61, 391- 412.
doi: 10.1007/s40295-014-0016-y |
| 21 | HEBERT L. Angles-only initial relative-orbit determination via maneuver. Auburn: Auburn University, 2016. |
| 22 |
HOU B, WANG D Y, WANG J Q, et al Optimal maneuvering for autonomous relative navigation using monocular camera sequential images. Journal of Guidance, Control, and Dynamics, 2021, 44 (11): 1947- 1960.
doi: 10.2514/1.G005706 |
| 23 |
LUO J J, GONG B C, YUAN J P, et al Angles-only relative navigation and closed-loop guidance for spacecraft proximity operations. Acta Astronautica, 2016, 128, 91- 106.
doi: 10.1016/j.actaastro.2016.06.032 |
| 24 |
ZHANG Y J, WANG J Q, HOU B W, et al Optimal maneuvering strategy of spacecraft evasion based on angles-only measurement and observability analysis. Journal of Systems Engineering and Electronics, 2023, 34 (1): 172- 184.
doi: 10.23919/JSEE.2023.000026 |
| 25 | KLEIN I, GELLER D K. Zero Δv solution to the angles-onlyrange observability problem during orbital proximity operations. Proc. of the Bar-Itzhack Memorial Symposium on Estimation, Navigation, and Spacecraft Control, 2015: 351−369 |
| 26 |
GELLER D K, PEREZ A Initial relative orbit determination for close-in proximity operations. Journal of Guidance, Control, and Dynamics, 2015, 38 (9): 1833- 1841.
doi: 10.2514/1.G000933 |
| 27 |
GONG B C, GELLER D K, LUO J J Initial relative orbit determination analytical covariance and performance analysis for proximity operations. Journal of Spacecraft and Rockets, 2016, 53 (5): 822- 835.
doi: 10.2514/1.A33444 |
| 28 |
GONG B C, LI W D, LI S, et al Angles-only initial relative orbit determination algorithm for non-cooperative spacecraft proximity operations. Astrodynamics, 2018, 2 (3): 217- 231.
doi: 10.1007/s42064-018-0022-0 |
| 29 | GONG B C, LUO J J, LI S, et al. Observability criterion of angles-only navigation for spacecraft proximity operations. Proceeding of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233(12): 4302–4315. |
| 30 | CHRISTENSEN R, GELLER D. Spin-assisted angles-only navigation and control for SmallSats. Proc. of the 37th Annual AAS Guidance and Control Conference, 2014: AAS14-067. |
| 31 |
KAUFMAN E, LOVELL T A, LEE T Nonlinear observability measure for relative orbit determination with angles-only measurements. The Journal of Astronautical Science, 2016, 63, 60- 80.
doi: 10.1007/s40295-015-0082-9 |
| 32 | LOVELL T A, LEE T. Nonlinear observability for relative satellite orbits with angles-only measurements. Proc. of the 24th International Symposium on Space Flight Dynamics, 2014. https://issfd.org/ISSFD_2014/ISSFD24_Paper_S16-3_Lovell-pdf. |
| 33 | NEWMAN B A, PRATT E, LOVELL A, et al. Quadratic hexa-dimensional solution for relative orbit determination. Proc. of AIAA/AAS Astrodynamics Specialist Conference, 2014. DOI: 10.2514/6.2014-4309. |
| 34 | NEWMAN B A, LOVELL T A, PRATT E, et al Hybrid linear-nonlinear initial determination with single iteration refinement for relative motion. Advances in the Astronautical Sciences, 2015, 155, 2149- 2168. |
| 35 | SHUBHAM G. Initial relative orbit determination using second order dynamics and line-of-sight measurements. Auburn: Auburn University, 2015. |
| 36 | SHUBHAM G. Initial relative-orbit determination using second-order dynamics and line-of-sight measurements. Auburn: Auburn University, 2015. |
| 37 |
GONG B C, MA Y Q, ZHANG W F, et al Deep-neural-network-based angles-only relative orbit determination for space non-cooperative target. Acta Astronautica, 2023, 204, 552- 567.
doi: 10.1016/j.actaastro.2022.09.024 |
| 38 |
TOMBASCO J, AXELRAD P Observability of relative hybrid elements, given space-based angles-only observations. Journal of Guidance, Control, and Dynamics, 2012, 35 (5): 1681- 1686.
doi: 10.2514/1.54981 |
| 39 | GAIAS G, D’AMICO S, ARDAENS J S Angles-only navigation to a noncooperative satellite using relative orbital elements. Journal of Guidance, Control, and Dynamics, 2014, 37 (3): 439- 451. |
| 40 | YIM J R, CRASSIDIS J L, JUNKINS J L. Autonomous orbit navigation of two spacecraft system using relative line of sight vector measurements. Proc. of the AAS/AIAA Spaceflight Mechanics Conference, 2004: AAS04-257. |
| 41 |
SULLIVAN J, D’AMICO S Nonlinear Kalman filtering for improved angles-only navigation using relative orbital elements. Journal of Guidance, Control, and Dynamics, 2017, 40 (9): 2183- 2200.
doi: 10.2514/1.G002719 |
| 42 | SULLIVAN J, LOVELL T A, D’AMICO S. Angles-only navigation for autonomous on-orbit space situational awareness applications. Proc. of the AAS/AIAA Astrodynamics Specialist Conference, 2018: AAS 18-468. |
| 43 |
ARDAENS J S, GAIAS G A numerical approach to the problem of angles-only initial relative orbit determination in low earth orbit. Advances in Space Research, 2019, 63 (12): 3884- 3899.
doi: 10.1016/j.asr.2019.03.001 |
| 44 | KOENIG A W, D’AMICO S. Observability-aware numerical algorithm for angles-only initial relative orbit determination. Proc. of the AAS/AIAA Astrodynamics Specialist Conference, 2020: AAS 20-594. |
| 45 | GRZYMISCH J, FICHTER W, CASASCO M, et al. A spherical coordinate parametrization for an in orbit bearings-only navigation filter. Proc. of the 2nd CEAS Specialist Conference on Guidance, Navigation and Control, 2013: 215−231. |
| 46 | GELLER D K, LOVELL T A Non-iterative approximate solution to the angles-only initial relative orbit determination problem in spherical coordinates. Proc. of the 26th AAS/AIAA Space Fight Mechanics Meetings, 2016, 158, 356. |
| 47 |
PEREZ A C, GELLER D K, LOVELL T A Non-iterative angles-only initial relative orbit determination with J2 perturbations. Acta Astronautica, 2018, 151, 146- 159.
doi: 10.1016/j.actaastro.2018.06.033 |
| 48 | GELLER D, LOVELL T A. Initial relative orbit determination performance analysis in cylindrical coordinates using angles-only measurements. Proc. of the 24th AAS/AIAA Space Flight Mechanics Meeting, 2014: AAS 14-212. |
| 49 |
GELLER D K, LOVELL T A Angles-only initial relative orbit determination performance analysis using cylindrical coordinates. The Journal of the Astronautical Sciences, 2017, 64, 72- 96.
doi: 10.1007/s40295-016-0095-z |
| 50 | PEREZ A, LOVELL T A, GELLER D, et al. Relative satellite motion solutions using curvilinear coordinate frames. Proc. of the AAS/AIAA Astrodynamics Specialist Conference, 2015: AAS 15−437. |
| 51 | GONG B C, ZHANG D G, ZHANG W F, et al Angles-only relative navigation algorithm for space non-cooperative target in cylindrical frame. Journal of Chinese Inertial Technology, 2021, 29 (6): 752- 762. |
| 52 |
BILAL, PANT M, ZAHEER H, et al Differential evolution: a review of more than two decades of research. Engineering Applications of Artificial Intelligence, 2020, 90, 103479.
doi: 10.1016/j.engappai.2020.103479 |
| 53 |
OPARA K R, ARABAS J Differential evolution: a survey of theoretical analyses. Swarm and Evolutionary Computation, 2019, 44, 546- 558.
doi: 10.1016/j.swevo.2018.06.010 |
| 54 | SI X G, BAO J D Evaluate linearity error based on Hill-Climbing and differential evolutionary algorithm. Journal of Test and Measurement Technology, 2019, 33 (5): 418- 420. |
| 55 |
DENG W, SHANG S F, CAI X, et al An improved differential evolution algorithm and its application in optimization problem. Soft Computing, 2021, 25 (7): 5277- 5298.
doi: 10.1007/s00500-020-05527-x |
| [1] | Yijie ZHANG, Jiongqi WANG, Bowen HOU, Dayi WANG, Yuyun CHEN. Optimal maneuvering strategy of spacecraft evasion based on angles-only measurement and observability analysis [J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 172-184. |
| [2] | Kai Zhao and Yongcheng Sun. Genetic-optimization framework for SVC transmission based on partial cooperative communication [J]. Systems Engineering and Electronics, 2017, 28(5): 861-870. |
| [3] | Kangsheng Dong, Hanqiao Huang, Changqiang Huang, and Zhuoran Zhang. Trajectory online optimization for unmanned combat aerial vehicle using combined strategy [J]. Systems Engineering and Electronics, 2017, 28(5): 963-970. |
| [4] | Hong Li, Li Zhang, and Yongchang Jiao. Discrete differential evolution algorithm for integer linear bilevel programming problems [J]. Systems Engineering and Electronics, 2016, 27(4): 912-. |
| [5] | Yu Xue,Yi Zhuang, Tianquan Ni, Siru Ni, and Xuezhi Wen. Self-adaptive learning based discrete differential evolution algorithm for solving CJWTA problem [J]. Journal of Systems Engineering and Electronics, 2014, 25(1): 59-68. |
| [6] | Yong Liu and Liang Ma. Improved gravitational search algorithm based on free search differential evolution [J]. Journal of Systems Engineering and Electronics, 2013, 24(4): 690-698. |
| [7] | Ye Xu and Ling Wang. Differential evolution algorithm for hybrid flow-shop scheduling problems [J]. Journal of Systems Engineering and Electronics, 2011, 22(5): 794-798. |
| [8] | Lianghong Wu, Yaonan Wang, and Shaowu Zhou. Improved differential evolution algorithm for resource-constrained project scheduling problem [J]. Journal of Systems Engineering and Electronics, 2010, 21(5): 798-805. |
| [9] | Wu Lianghong, Wang Yaonan, Zhou Shaowu & Tan Wen. Design of PID controller with incomplete derivation based on differential evolution algorithm [J]. Journal of Systems Engineering and Electronics, 2008, 19(3): 578-583. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||