
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (3): 741-752.doi: 10.23919/JSEE.2024.000058
• CONTROL THEORY AND APPLICATION • Previous Articles
Yuran LI1,2( ), Yichen LI1,2(), Monan ZHANG1,2(), Wenbin YU1,2,*(), Xinping GUAN1,2()
), Yichen LI1,2(), Monan ZHANG1,2(), Wenbin YU1,2,*(), Xinping GUAN1,2()
Received:2023-10-27
Online:2024-06-18
Published:2024-06-19
Contact:
Wenbin YU
E-mail:liyuran20000220@sjtu.edu.cn;liyichensjtu@sjtu.edu.cn;mnzhang@sjtu.edu.cn;yuwenbin@sjtu.edu.cn;xpguan@sjtu.edu.cn
About author:Supported by:Yuran LI, Yichen LI, Monan ZHANG, Wenbin YU, Xinping GUAN. Real-time tracking of fast-moving object in occlusion scene[J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 741-752.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Overall process of our tracking method"
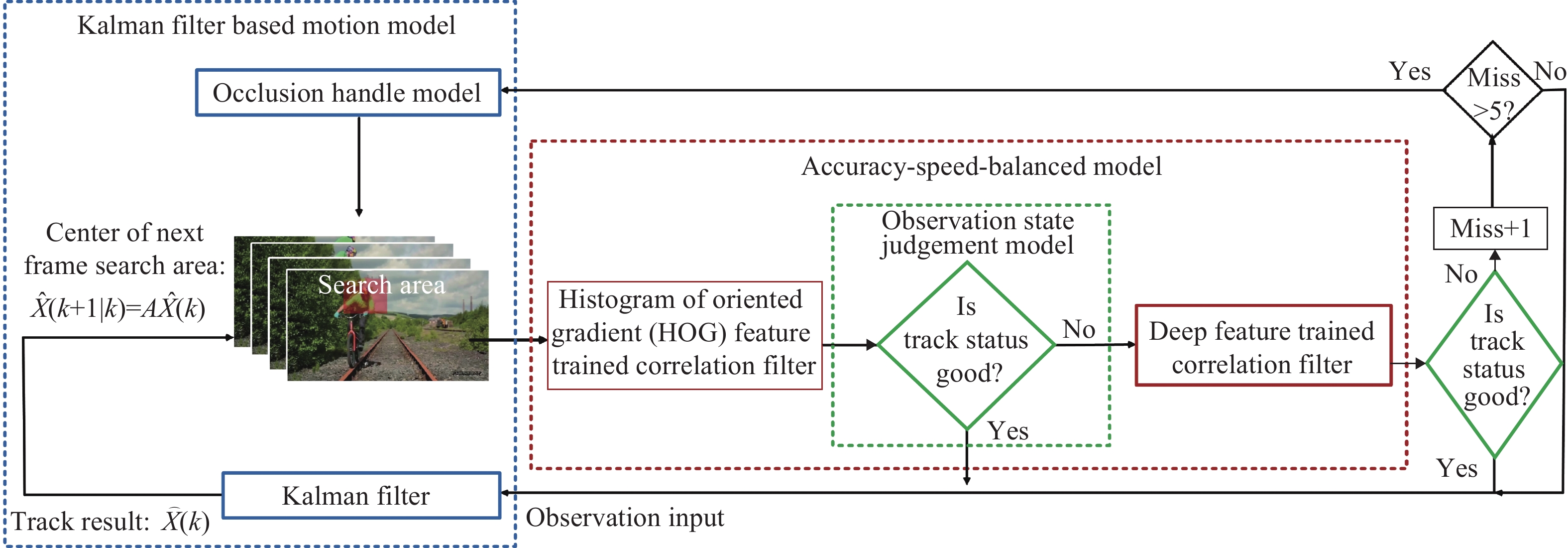
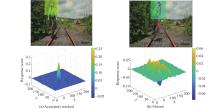
Fig 2
Response scores in different tracking states"

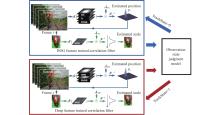
Fig 3
Speed-accuracy-balanced model"
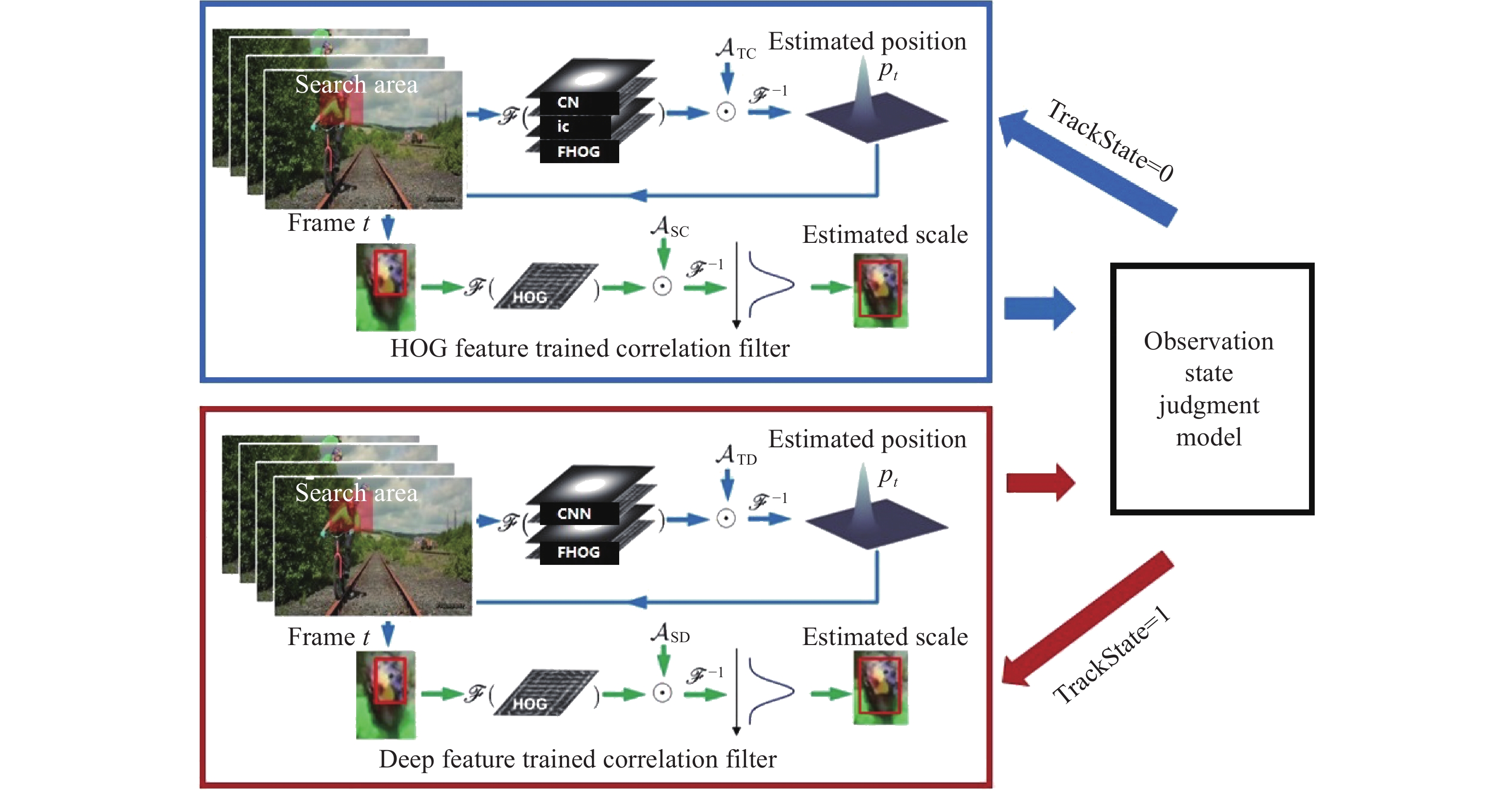

Fig 4
Overall process of the Kalman filter based occlusion handle motion model"
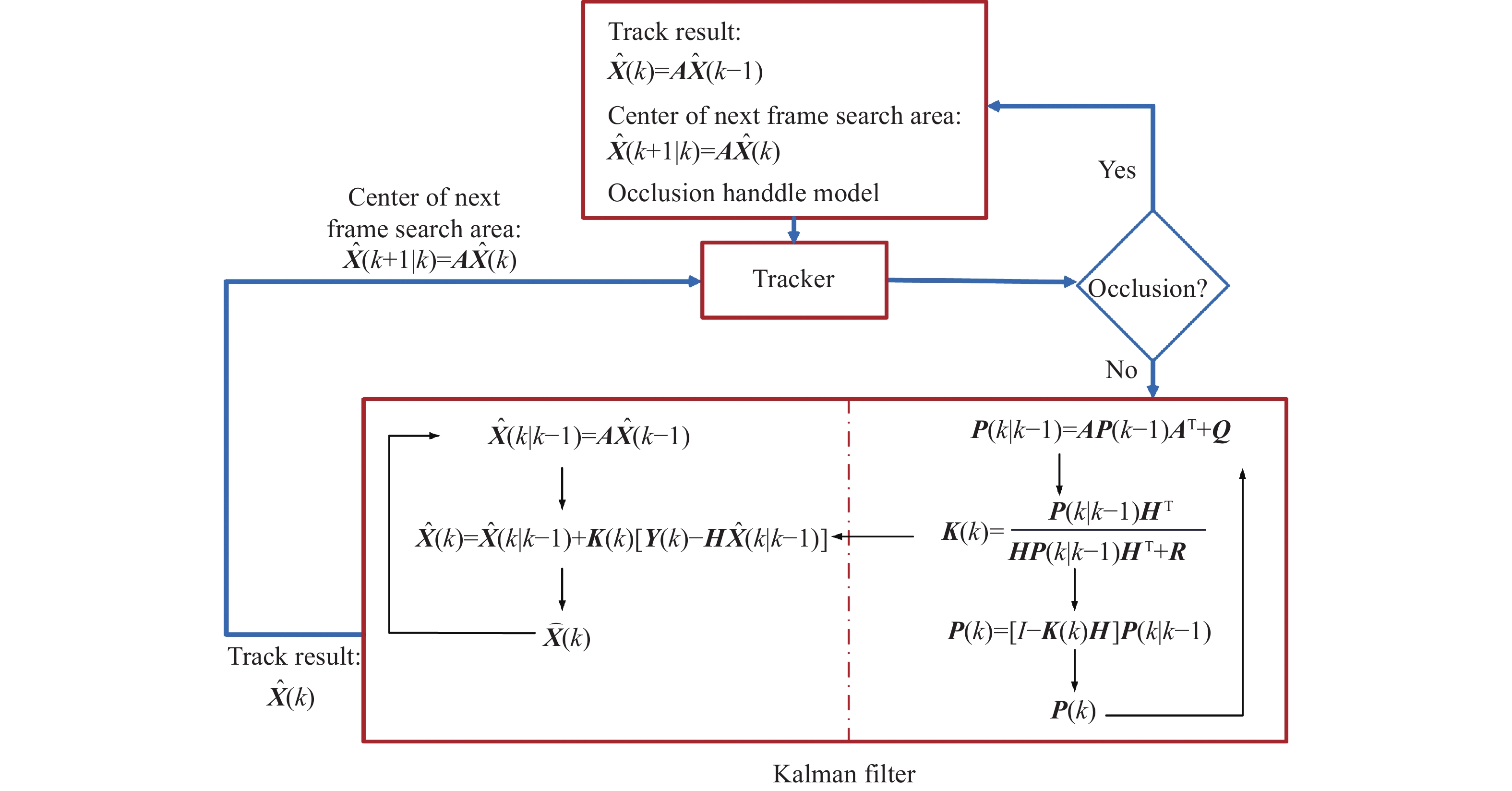
Table 1
Notation of every module"
| Speed-accuracy-balanced model | Constrained model updater | Motion model |
| Deep-HC | Renew | Kalman filter |
Table 2
Ablation experiment result"
| Scene | Module | AUC | Scene | Module | AUC | |
| MB | Deep-HC-renew | 0.626 | FM | Deep-HC-renew | 0.633 | |
| Deep-HC | 0.617 | Deep-HC | 0.625 | |||
| Deep-HC-renew-KF | 0.614 | ECO-HC | 0.621 | |||
| ECO-HC | 0.610 | Deep-HC-renew-KF | 0.608 | |||
| IPR | Deep-HC-renew-KF | 0.549 | OPR | Deep-HC-renew | 0.567 | |
| Deep-HC-renew | 0.539 | Deep-HC | 0.556 | |||
| Deep-HC | 0.532 | ECO-HC | 0.556 | |||
| ECO-HC | 0.530 | Deep-HC-renew-KF | 0.552 | |||
| BC | Deep-HC-renew-KF | 0.631 | LR | ECO-HC | 0.594 | |
| Deep-HC-renew | 0.627 | Deep-HC-renew-KF | 0.594 | |||
| Deep-HC | 0.611 | Deep-HC-renew | 0.592 | |||
| ECO-HC | 0.583 | Deep-HC | 0.586 | |||
| OCC | Deep-HC-renew-KF | 0.574 | IV | Deep-HC-renew-KF | 0.616 | |
| Deep-HC-renew | 0.574 | Deep-HC-renew | 0.609 | |||
| Deep-HC | 0.562 | Deep-HC | 0.595 | |||
| ECO-HC | 0.562 | ECO-HC | 0.588 | |||
| OV | Deep-HC-renew-KF | 0.548 | SV | Deep-HC-renew-KF | 0.594 | |
| Deep-HC-renew | 0.530 | ECO-HC | 0.593 | |||
| ECO-HC | 0.526 | Deep-HC-renew | 0.592 | |||
| Deep-HC | 0.525 | Deep-HC | 0.587 | |||
| Deep-HC-renew | 0.615 | Deep-HC-renew | 0.568 | |||
| all | Deep-HC-renew-KF | 0.612 | DEF | Deep-HC | 0.564 | |
| Deep-HC | 0.609 | ECO-HC | 0.558 | |||
| ECO-HC | 0.604 | Deep-HC-renew-KF | 0.554 |

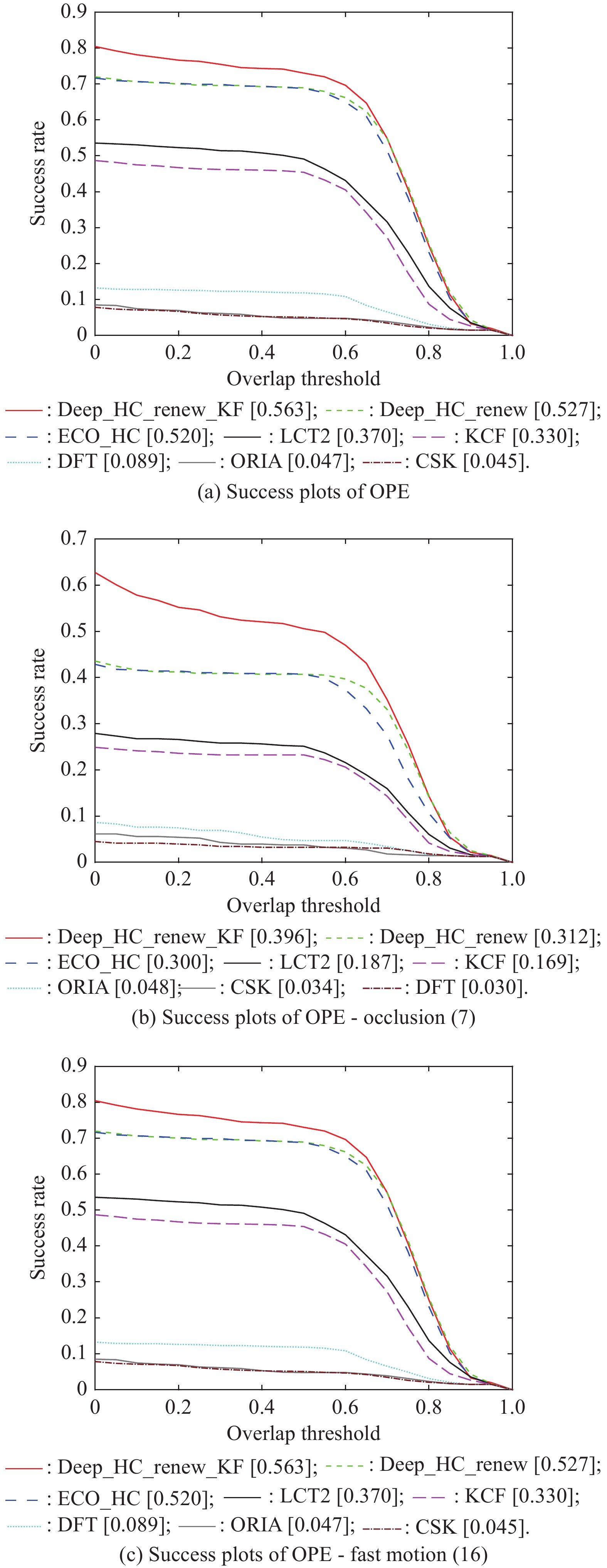
Fig 5
Success plot of advanced tracking methods for 11 subsets on OTB100"

Fig 6
Success plot of advanced tracking methods on regular movement dataset"
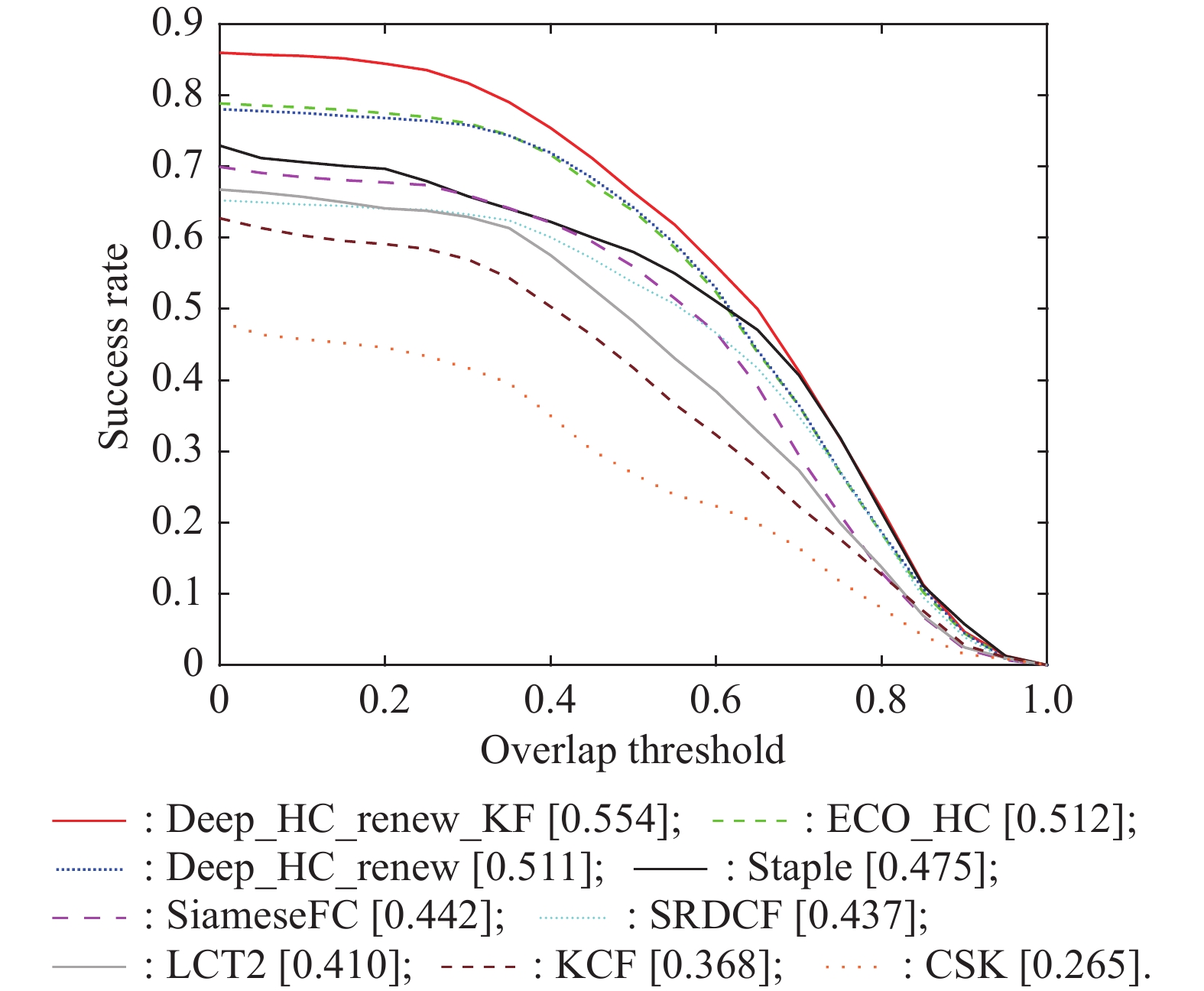

Fig 7
Tracking result of different methods on 30 fps dataset"
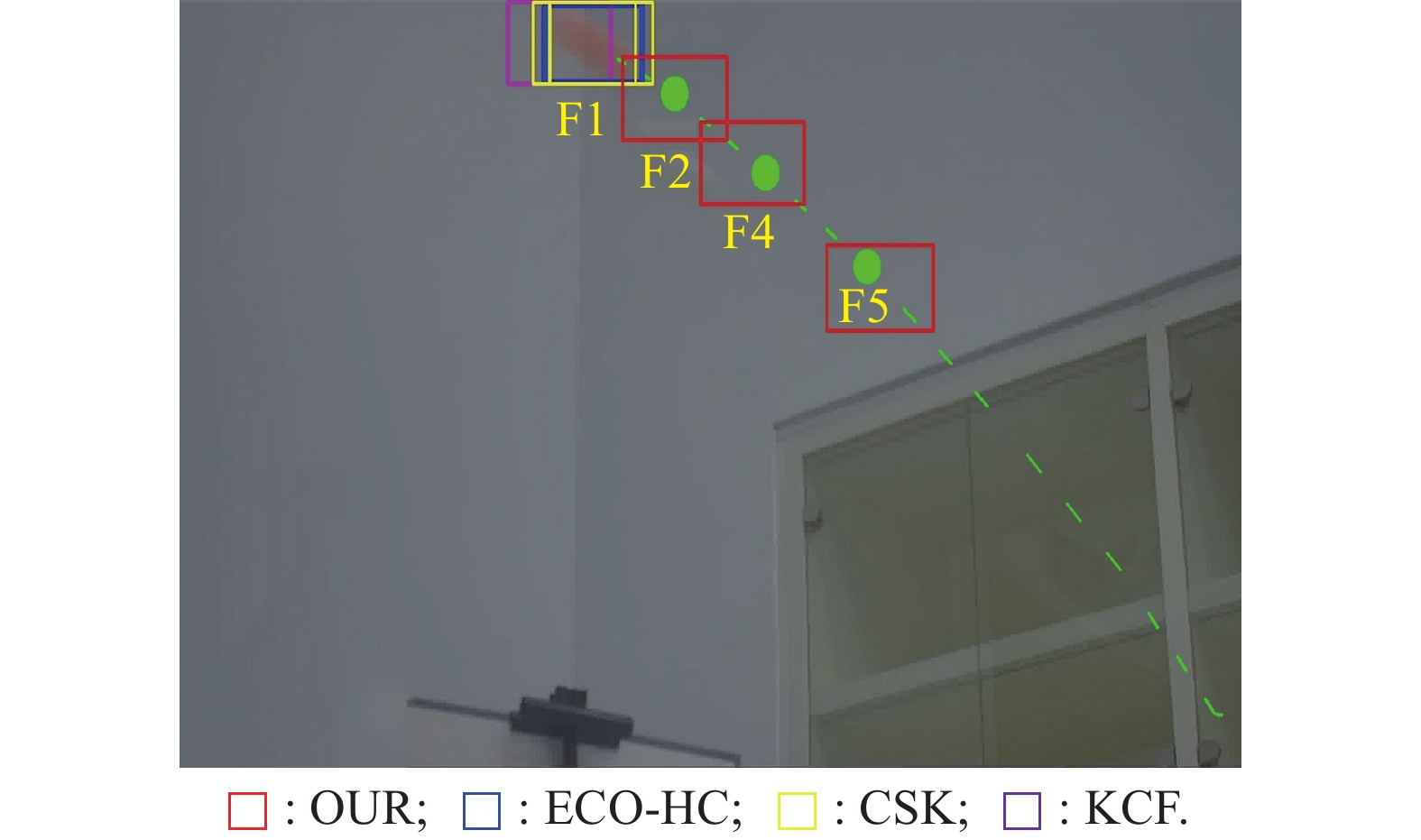

Fig 8
Tracking result of different methods on 100 fps no occlusion dataset"
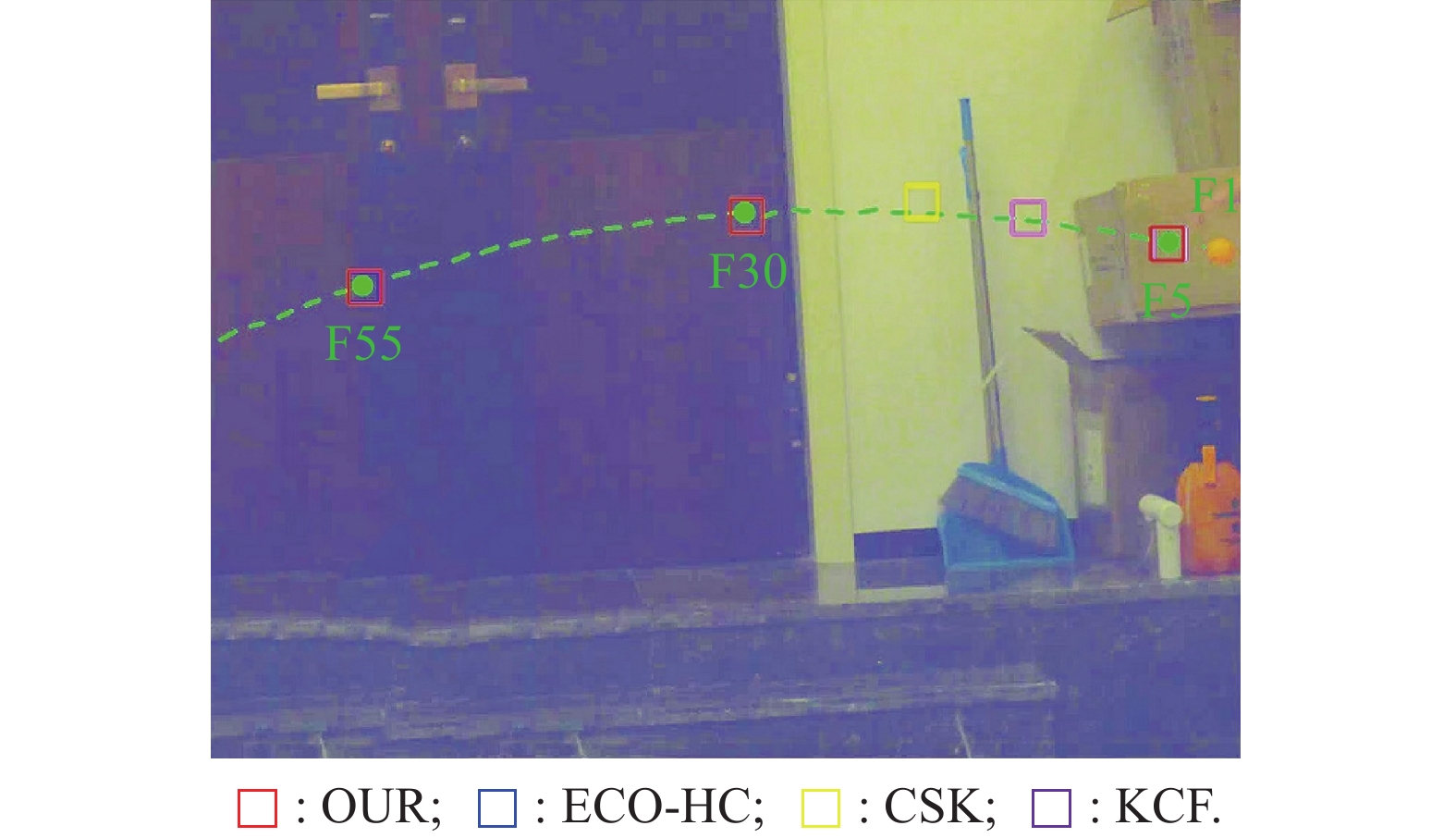
Fig 9
Tracking result of different methods on 100 fps short-term occlusion dataset"
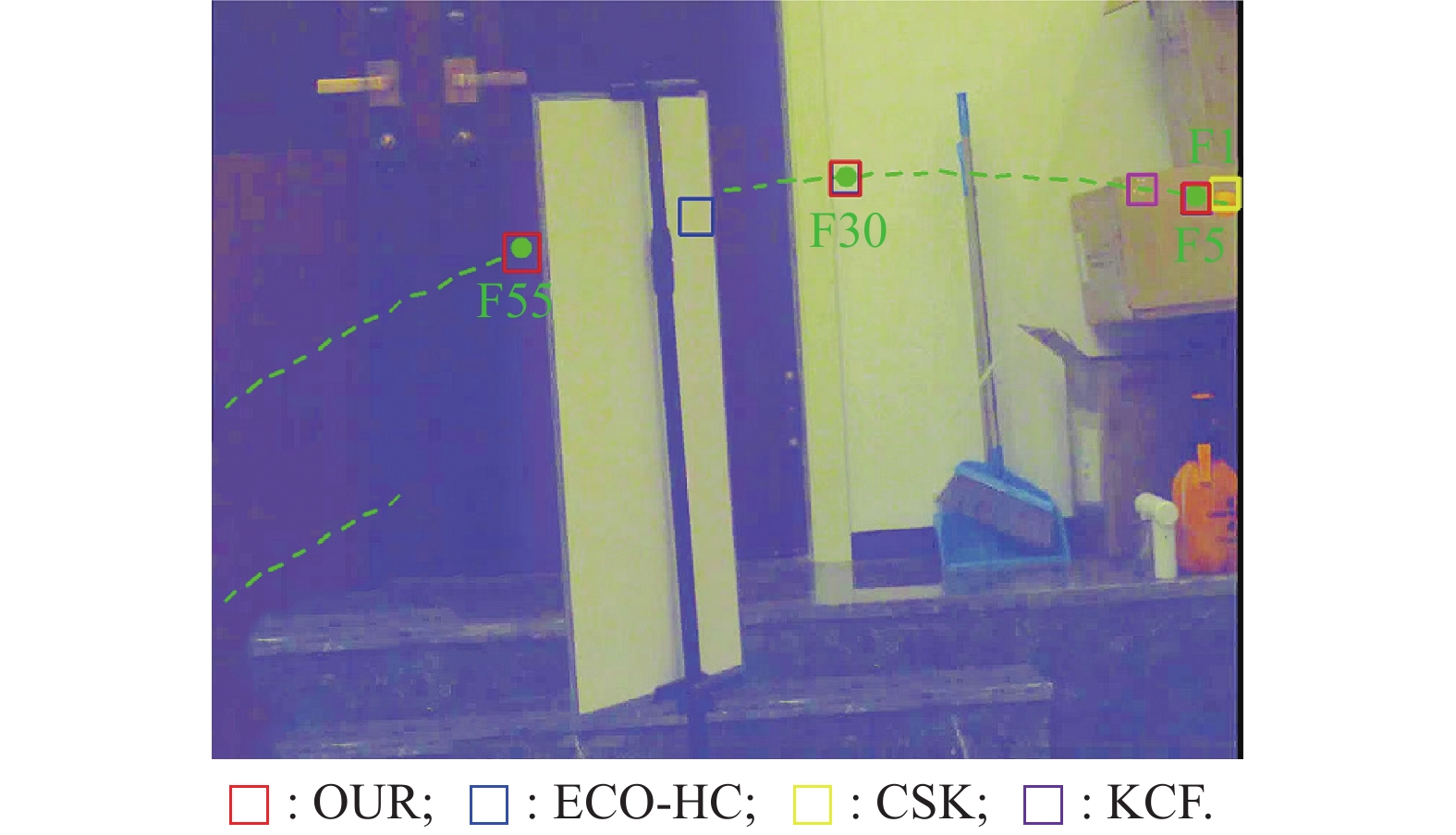
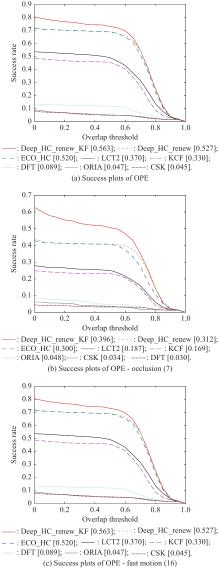
Fig 10
Tracking result of advanced methods on our own collected dataset"
| 1 | KHATTAK A S, RAJA G, ANJUM N, et al. Integration of mean-shift and particle filter: a survey. Proc. of the 12th International Conference on Frontiers of Information Technology, 2014: 286−291. |
| 2 | GHEDIA N, VITHALANI C, KOTHARI A M, et al. Existing research in video surveillance system. https://doi.org/10.1007/978-3-030-90910-9_2. |
| 3 |
ZHOU N, LAU L, BAI R, et al A genetic optimization resampling based particle filtering algorithm for indoor target tracking. Remote Sensing, 2021, 13 (1): 132- 154.
doi: 10.3390/rs13010132 |
| 4 |
WAILA G S, KUMAR A, SAXENA A, et al Robust object tracking with crow search optimized multi-cue particle filter. Pattern Analysis and Applications, 2020, 23, 1439- 1455.
doi: 10.1007/s10044-019-00847-7 |
| 5 | ZHANG L A survey of target tracking algorithms based on correlation filtering. International Core Journal of Engineering, 2022, 8 (4): 566- 576. |
| 6 | DU S D, WANG S P An overview of correlation-filter-based object tracking. IEEE Trans. on Computational Social Systems, 2021, 9 (1): 18- 31. |
| 7 | HENRIQUES J F, CASEIRO R, MARTINS P, et al High-speed tracking with kernelized correlation filters. IEEE Trans on Pattern Analysis and Machine Intelligence, 2014, 37 (3): 583- 596. |
| 8 | BOLME D S, BEVERIDGE J R, DRAPER B A, et al. Visual object tracking using adaptive correlation filters. Proc. of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2010: 2544−2550. |
| 9 | BERTINETTO L, VALMADRE J, GOLODETZ S, et al. Staple: complementary learners for real-time tracking. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 1401−1409. |
| 10 | MA C, YANG X K, ZHANG C Y, et al. Long-term correlation tracking. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2015: 5388–5396. |
| 11 | DANELLJAN M, HAGER G, SHAHBAZ K, et al. Learning spatially regularized correlation filters for visual tracking. Proc. of the IEEE International Conference on Computer Vision, 2015: 4310−4318. |
| 12 | DANELLJAN M, BHAT G, SHAHBAZ K, et al. Eco: efficient convolution operators for tracking. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 6638−6646. |
| 13 | LIU S, LIU D Y, SRIVASTAVA G, et al Overview and methods of correlation filter algorithms in object tracking. Complex & Intelligent Systems, 2021, 7, 1895- 1917. |
| 14 | ZHAO S K, SUN K W, JI Y F, et al. Correlation filter-based object tracking algorithms. Proc. of the IEEE International Conference on Information Communication and Signal Processing, 2020: 57−62 |
| 15 | WANG D C, BAI C S, WU K J Survey of video object detection based on deep learning. Journal of Frontiers of Computer Science & Technology, 2021, 15 (9): 1563- 1578. |
| 16 | BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully-convolutional siamese networks for object tracking. Proc. of the Computer Vision-ECCV 2016 Workshops, 2016: 850−865. |
| 17 | VOIGTLAENDER P, LUITEN J, TORR P H S, et al. Siam R-CNN: visual tracking by re-detection. Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 6578−6588. |
| 18 | LI B, WU W, WANG Q, et al. Siamrpn++: evolution of siamese visual tracking with very deep networks. Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 4282−4291. |
| 19 | WANG N, ZHOU W G, WANG J, et al. Transformer meets tracker: exploiting temporal context for robust visual tracking. Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 1571−1580. |
| 20 | DANELLJAN M, BHAT G, KHAN F S, et al. Atom: accurate tracking by overlap maximization. Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 4660−4669. |
| 21 | BHAT G, DANELLJAN M, GOOL L V, et al. Learning discriminative model prediction for tracking. Proc. of the IEEE/CVF International Conference on Computer Vision, 2019: 6182−6191. |
| 22 | WU Y, LIM J, YANG M H. Online object tracking: a benchmark. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2013: 2411−2418. |
| 23 |
WU Y, LIM J, YANG M H Object tracking benchmark. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2015, 37 (9): 1834- 1848.
doi: 10.1109/TPAMI.2014.2388226 |
| 24 | KRISTAN M, MATAS J, LEONARDIS A, et al. The ninth visual object tracking vot2021 challenge results. Proc. of the IEEE/CVF International Conference on Computer Vision, 2021: 2711−2738. |
| 25 | MUELLER M, SMITH N, GHANEM B. A benchmark and simulator for uav tracking. Proc. of the Computer Vision-ECCV 2016 Workshops, 2016: 445−461. |
| 26 |
JIANG M, LI R, LIU Q S, et al High speed long-term visual object tracking algorithm for real robot systems. Neurocomputing, 2021, 434, 268- 284.
doi: 10.1016/j.neucom.2020.12.113 |
| 27 |
MA C, HUANG J B, YANG X, et al Adaptive correlation filters with long-term and short-term memory for object tracking. International Journal of Computer Vision, 2018, 126, 771- 796.
doi: 10.1007/s11263-018-1076-4 |
| 28 | YANG Z F, CHEN X, Optimized searching strategy for kcf object tracking algorithm. Journal of Wuhan Institute of Technology, 2019, 41(1): 98−102. (in Chinese) |
| 29 | DANELLJAN M, ROBINSON A, SHAHBAZ K F, et al. Beyond correlation filters: learning continuous convolution operators for visual tracking. Proc. of the Computer Vision-ECCV 2016 Workshops, 2016: 472−488. |
| 30 | LI X, ZHOU J L, HOU J Q, et al Research on improved moving object tracking method based on eco-hc. Journal of Nanjing University (Natural Science), 2020, 56 (2): 216- 226. |
| 31 | WANG N Y, SHI J P, YEUNG D Y, et al. Understanding and diagnosing visual tracking systems. Proc. of the IEEE International Conference on Computer Vision, 2015: 3101−3109. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||