
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (3): 720-731.doi: 10.23919/JSEE.2024.000059
• SYSTEMS ENGINEERING • Previous Articles
Faxing LU( ), Qiuyang DAI(), Guang YANG(), Zhengrong JIA()
), Qiuyang DAI(), Guang YANG(), Zhengrong JIA()
Received:2021-10-25
Online:2024-06-18
Published:2024-06-19
Contact:
Qiuyang DAI
E-mail:lfx1974@163.com;1638443928@qq.com;420137507@qq.com;15527396914@sina.cn
About author:Faxing LU, Qiuyang DAI, Guang YANG, Zhengrong JIA. Online task planning method of anti-ship missile based on rolling optimization[J]. Journal of Systems Engineering and Electronics, 2024, 35(3): 720-731.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Dynamic planning based on rolling optimization framework"

Fig 2
Initial scenario"
Table 1
Target parameters of initial scenario"
| Target | X coordinate | Y coordinate | Radius of defense area | Target | X coordinate | Y coordinate | Radius of defense area | Target | X coordinate | Y coordinate | Radius of defense area | ||
| T-1 | −0.53 | 84.15 | 52.63 | T-8 | −129.96 | 3.73 | 64.98 | T-15 | −16.62 | 6.42 | 6.93 | ||
| T-2 | 91.61 | 46.87 | 86.91 | T-9 | −66.58 | 119.84 | 35.11 | T-16 | −18.99 | 22.90 | 4.55 | ||
| T-3 | 101.20 | −66.58 | 36.25 | T-10 | −31.14 | 22.90 | 11.01 | T-17 | 2.93 | −19.41 | 6.09 | ||
| T-4 | 31.42 | −108.66 | 35.25 | T-11 | −31.42 | 4.47 | 12.75 | T-18 | 25.83 | −28.90 | 8.44 | ||
| T-5 | 92.14 | −130.49 | 42.75 | T-12 | −14.24 | −6.42 | 9.65 | T-19 | 12.57 | −29.11 | 10.09 | ||
| T-6 | −59.12 | −84.15 | 65.37 | T-13 | −7.82 | 15.78 | 11.54 | T-20 | 24.76 | −44.05 | 10.07 | ||
| T-7 | −98.00 | 78.83 | 29.90 | T-14 | −4.05 | 0.98 | 5.85 | T-21 | 39.70 | −52.57 | 10.80 |
Table 2
Target value of initial scenario"
| Target | Value | Target | Value | Target | Value | ||
| T-1 | 11.70 | T-8 | 19.01 | T-15 | 65.61 | ||
| T-2 | 6.34 | T-9 | 16.60 | T-16 | 43.19 | ||
| T-3 | 8.18 | T-10 | 28.20 | T-17 | 38.28 | ||
| T-4 | 10.90 | T-11 | 41.10 | T-18 | 30.23 | ||
| T-5 | 19.03 | T-12 | 38.95 | T-19 | 38.17 | ||
| T-6 | 10.48 | T-13 | 38.71 | T-20 | 43.45 | ||
| T-7 | 20.87 | T-14 | 31.46 | T-21 | 26.28 |
Table 3
Anti-ship missile and target allocation plan of initial scenario"
| Anti-ship missile | Target | Anti-shipmissile | Target | Anti-shipmissile | Target | ||
| M-1 | T-14 | M-9 | T-8 | M-17 | T-20 | ||
| M-2 | T-19 | M-10 | T-12 | M-18 | T-5 | ||
| M-3 | T-1 | M-11 | T-15 | M-19 | T-18 | ||
| M-4 | T-5 | M-12 | T-13 | M-20 | T-21 | ||
| M-5 | T-11 | M-13 | T-10 | M-21 | T-14 | ||
| M-6 | T-15 | M-14 | T-7 | M-22 | T-16 | ||
| M-7 | T-20 | M-15 | T-9 | M-23 | T-16 | ||
| M-8 | T-17 | M-16 | T-19 | M-24 | T-15 |
Table 4
Multi-stage attack plan of initial scenario"
| Attack wave | M-1 | M-2 | M-3 | M-4 | M-5 | M-6 |
| 1 | − | − | T-1 | T-5 | − | − |
| 2 | T-5→T-14 | T-5→T-19 | − | − | T-5→T-11 | − |
| 3 | − | − | − | − | − | T-5→T-14→T-15 |
| Attack wave | M-7 | M-8 | M-9 | M-10 | M-11 | M-12 |
| 1 | − | − | T-8 | − | − | − |
| 2 | T-5→T-20 | T-5→T-17 | − | T-5→T-12 | − | T-1→T-13 |
| 3 | − | − | − | − | T-5→T-16→T-15 | − |
| Attack wave | M-13 | M-14 | M-15 | M-16 | M-17 | M-18 |
| 1 | − | T-7 | T-9 | − | − | T-5 |
| 2 | T-5→T-10 | − | − | T-5→T-19 | T-5→T-20 | − |
| 3 | − | − | − | − | − | − |
| Attack wave | M-19 | M-20 | M-21 | M-22 | M-23 | M-24 |
| 1 | − | − | − | − | − | − |
| 2 | T-5→T-18 | T-5→T-21 | T-5→T-14 | T-1→T-16 | T-5→T-16 | − |
| 3 | − | − | − | − | − | T-5→T-16→T-15 |
Fig 3
Index function value distribution of multi-stage attack of initial scenario"

Fig 4
Target information update scenario"

Table 5
Anti-ship missile and target allocation plan of target information update scenario"
| Missile | Target | Missile | Target | Missile | Target | ||
| M-1 | T-10 | M-9 | T-19 | M-17 | T-20 | ||
| M-2 | T-13 | M-10 | T-12 | M-18 | T-12 | ||
| M-3 | T-8 | M-11 | T-13 | M-19 | T-5 | ||
| M-4 | T-19 | M-12 | T-21 | M-20 | T-15 | ||
| M-5 | T-11 | M-13 | T-17 | M-21 | T-14 | ||
| M-6 | T-14 | M-14 | T-15 | M-22 | T-18 | ||
| M-7 | T-20 | M-15 | T-16 | M-23 | T-7 | ||
| M-8 | T-17 | M-16 | T-9 | M-24 | T-16 |
Table 6
Multi-stage attack plan of target information update scenario"
| Attack wave | Attack wave 1 | Attack wave | Attack wave 1 | Attack wave | Attack wave 1 | ||
| M-1 | T-10 | M-9 | T-19 | M-17 | T-20 | ||
| M-2 | T-13 | M-10 | T-12 | M-18 | T-12 | ||
| M-3 | T-8 | M-11 | T-13 | M-19 | T-5 | ||
| M-4 | T-19 | M-12 | T-21 | M-20 | T-15 | ||
| M-5 | T-11 | M-13 | T-17 | M-21 | T-14 | ||
| M-6 | T-14 | M-14 | T-15 | M-22 | T-18 | ||
| M-7 | T-20 | M-15 | T-16 | M-23 | T-7 | ||
| M-8 | T-17 | M-16 | T-9 | M-24 | T-16 |
Fig 5
Index function value distribution before and after re-planning of multi-stage attack of target information update scenario"
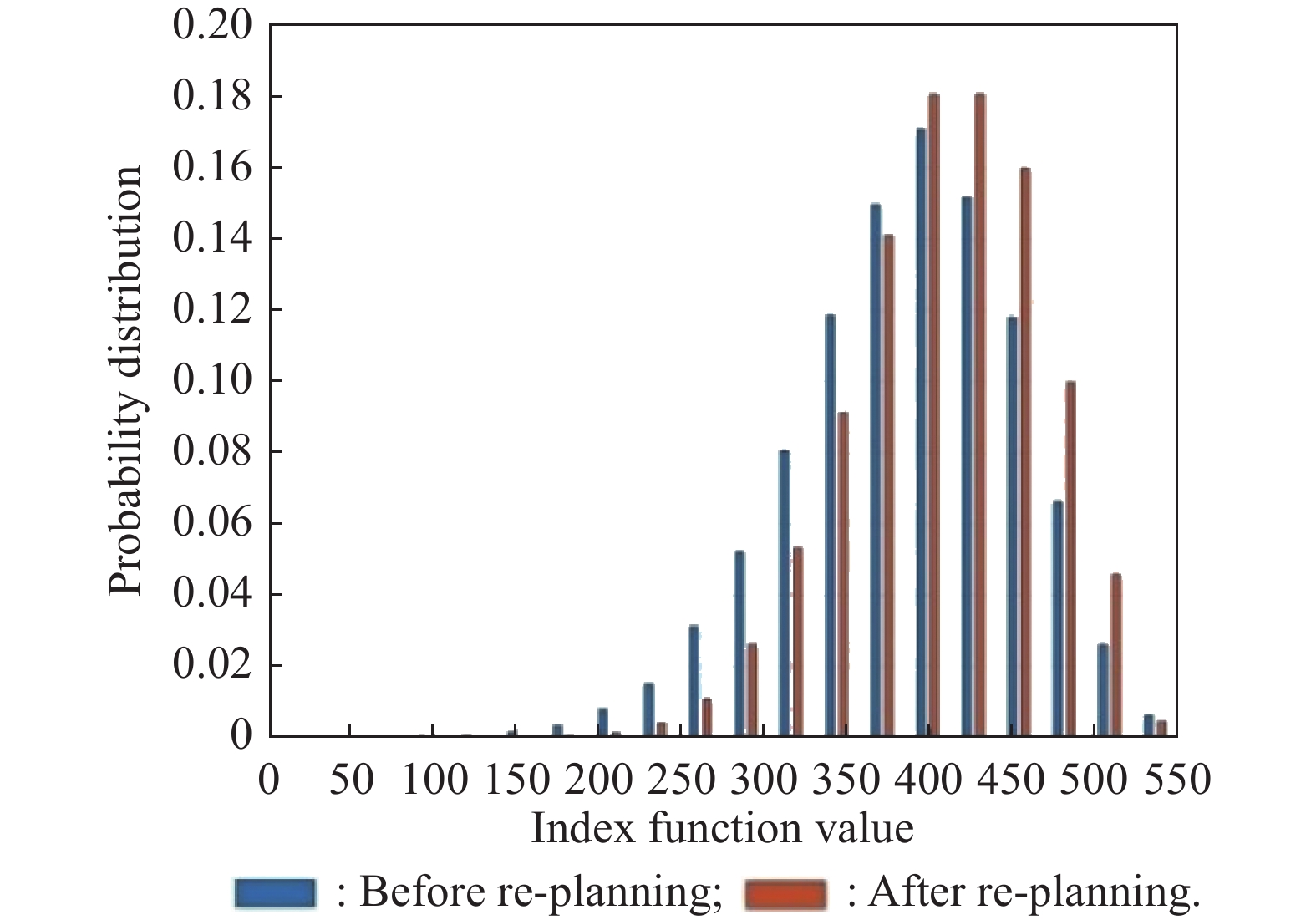

Fig 6
New targets scenario"
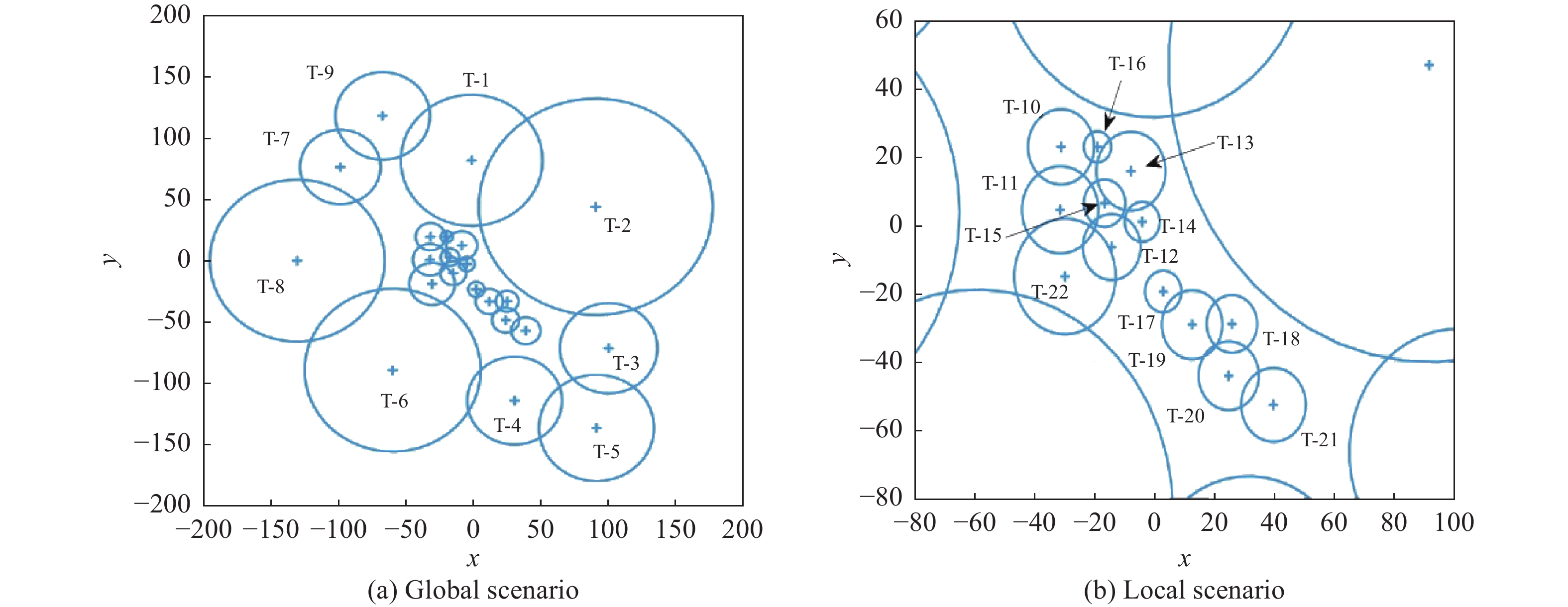
Table 7
Anti-ship missile and target allocation plan of new targets scenario"
| Anti-ship missile | Target | Anti-ship missile | Target | Anti-ship missile | Target | ||
| M-1 | T-18 | M-9 | T-20 | M-17 | T-21 | ||
| M-2 | T-19 | M-10 | T-13 | M-18 | T-15 | ||
| M-3 | T-15 | M-11 | T-5 | M-19 | T-11 | ||
| M-4 | T-6 | M-12 | T-18 | M-20 | T-16 | ||
| M-5 | T-12 | M-13 | T-11 | M-21 | T-22 | ||
| M-6 | T-15 | M-14 | T-16 | M-22 | T-17 | ||
| M-7 | T-14 | M-15 | T-8 | M-23 | T-10 | ||
| M-8 | T-5 | M-16 | T-20 | M-24 | T-7 |
Table 8
Multi-stage attack plan of new targets scenario"
| Attack wave | M-1 | M-2 | M-3 | M-4 | M-5 | M-6 |
| 1 | − | − | − | T-6 | − | − |
| 2 | T-5→T-18 | T-5→T-19 | − | − | T-5→T-12 | − |
| 3 | − | − | T-5→T-16→T-15 | − | − | T/5→T/16→T/15 |
| Attack wave | M-7 | M-8 | M-9 | M-10 | M-11 | M-12 |
| 1 | − | T-5 | − | − | T-5 | − |
| 2 | T-5→T-14 | − | T-5→T-20 | T-5→T-13 | − | T-5→T-18 |
| 3 | − | − | − | − | − | − |
| Attack wave | M-13 | M-14 | M-15 | M-16 | M-17 | M-18 |
| 1 | − | − | T-8 | − | − | − |
| 2 | T-5→T-11 | T-5→T-16 | − | T-5→T-20 | T-5→T-21 | − |
| 3 | − | − | − | − | − | T-5→T-16→T-15 |
| Attackwave | M-19 | M-20 | M-21 | M-22 | M-23 | M-24 |
| 1 | − | − | − | − | − | T-7 |
| 2 | T-5→T-11 | T-5→T-16 | T-5→T-22 | T-5→T-17 | T-5→T-10 | − |
| 3 | − | − | − | − | − | − |
Fig 7
Index function value distribution before and after re-planning of multi-stage attack of new targets scenario"
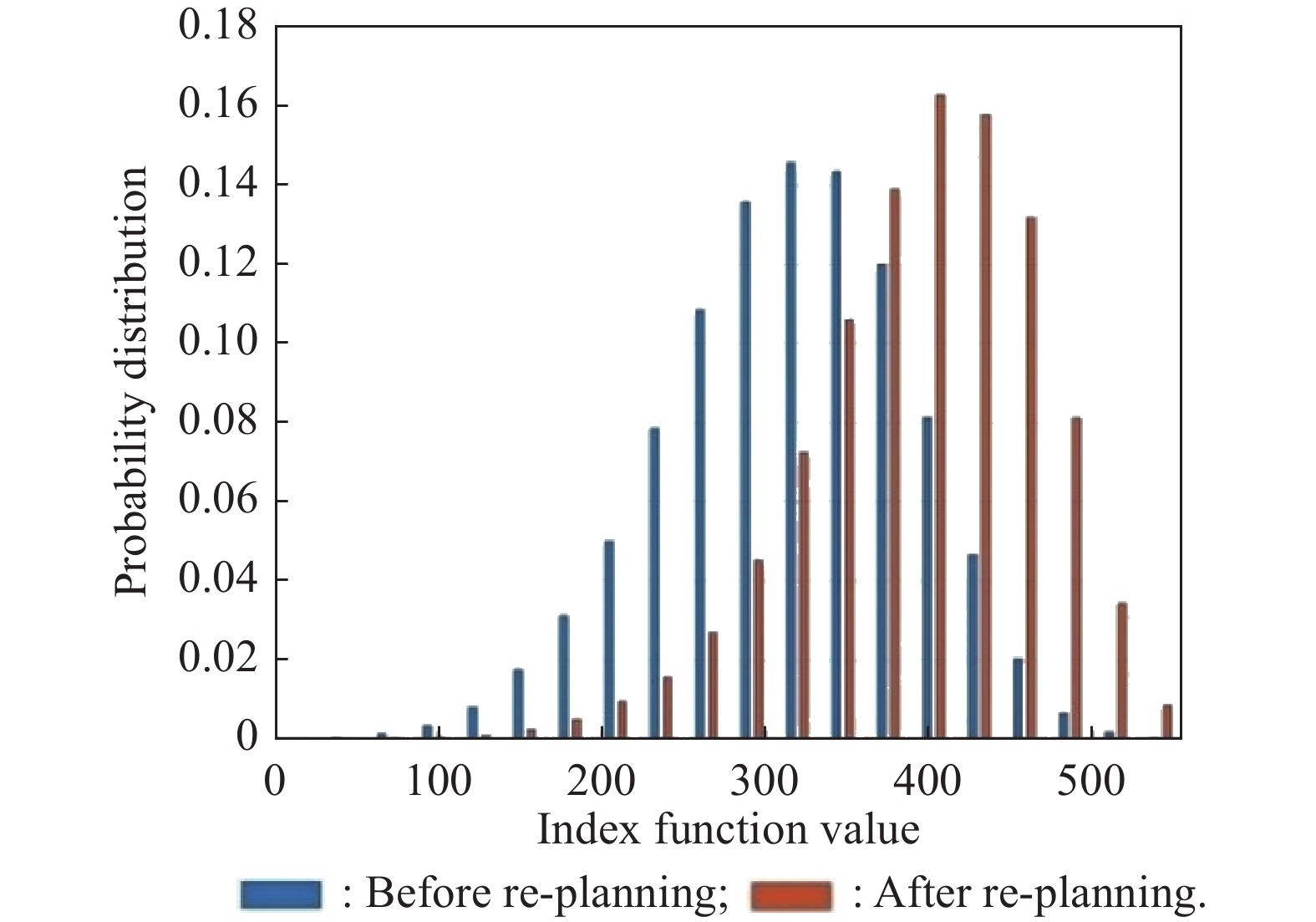

Fig 8
Invalid targets scenario"
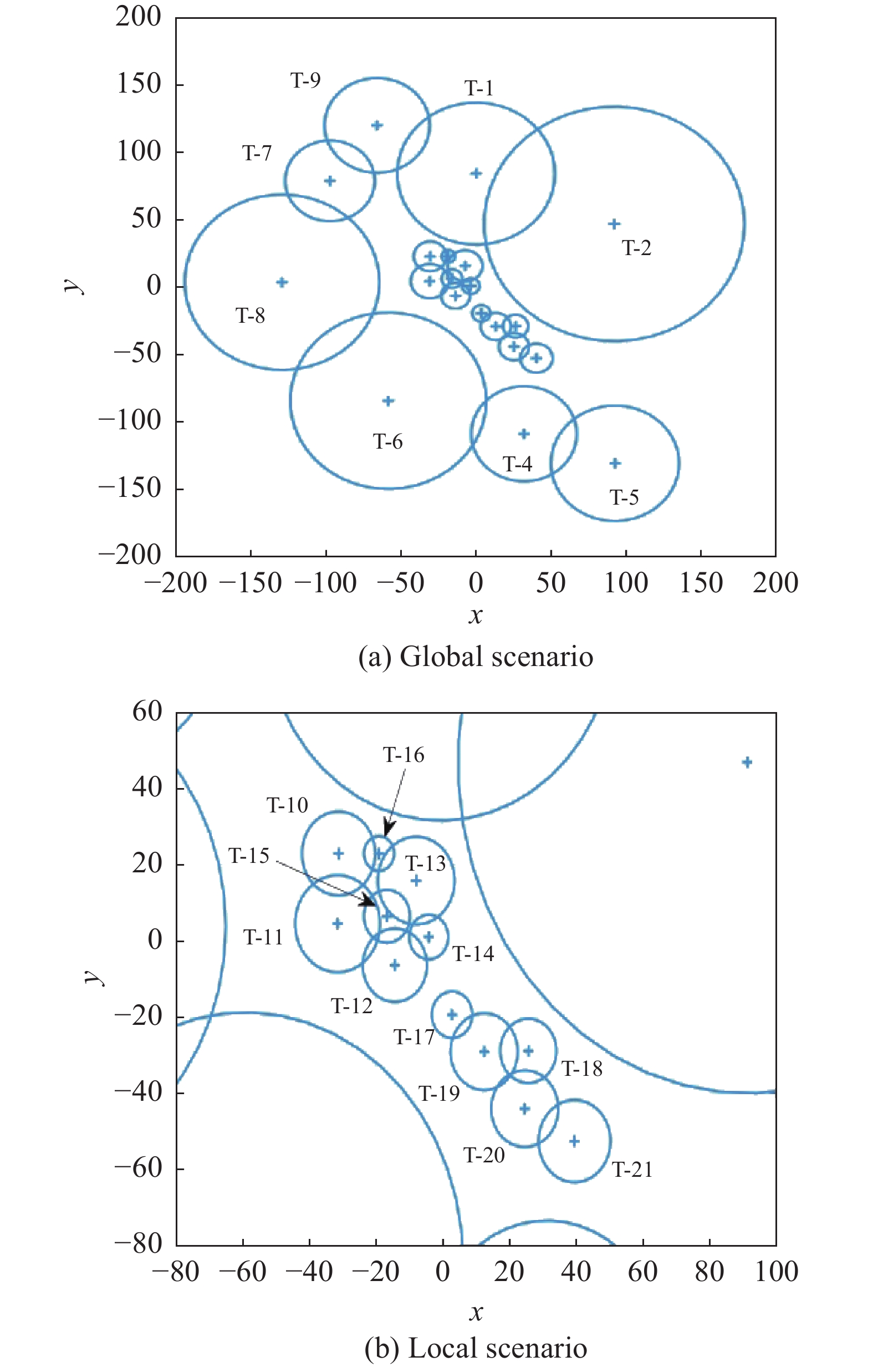
Table 9
Anti-ship missile and target allocation plan of invalid targets scenario"
| Anti-ship missile | Target | Anti-ship missile | Target | Anti-ship missile | Target | ||
| M-1 | T-10 | M-9 | T-19 | M-17 | T-5 | ||
| M-2 | T-18 | M-10 | T-15 | M-18 | T-14 | ||
| M-3 | T-8 | M-11 | T-13 | M-19 | T-11 | ||
| M-4 | T-20 | M-12 | T-21 | M-20 | T-7 | ||
| M-5 | T-11 | M-13 | T-14 | M-21 | T-20 | ||
| M-6 | T-19 | M-14 | T-15 | M-22 | T-16 | ||
| M-7 | T-13 | M-15 | T-12 | M-23 | T-16 | ||
| M-8 | T-17 | M-16 | T-12 | M-24 | T-9 |
Table 10
Multi-stage attack plan of invalid targets scenario"
| Attack wave | M-1 | M-2 | M-3 | M-4 | M-5 | M-6 |
| 1 | T-10 | T-18 | T-8 | T-20 | T-11 | T-19 |
| 2 | − | − | − | − | − | − |
| Attack wave | M-7 | M-8 | M-9 | M-10 | M-11 | M-12 |
| 1 | T-13 | T-17 | T-19 | − | T-13 | T-21 |
| 2 | − | − | − | T-16→T-15 | − | − |
| Attack wave | M-13 | M-14 | M-15 | M-16 | M-17 | M-18 |
| 1 | T-14 | − | T-12 | T-12 | T-5 | T-14 |
| 2 | − | T-11→T-15 | − | − | − | − |
| Attackwave | M-19 | M-20 | M-21 | M-22 | M-23 | M-24 |
| 1 | T-11 | T-7 | T-20 | T-16 | T-16 | T-9 |
| 2 | − | − | − | − | − | − |
Fig 9
Index function value distribution before and after re-plan of multi-stage attack of invalid targets scenario"
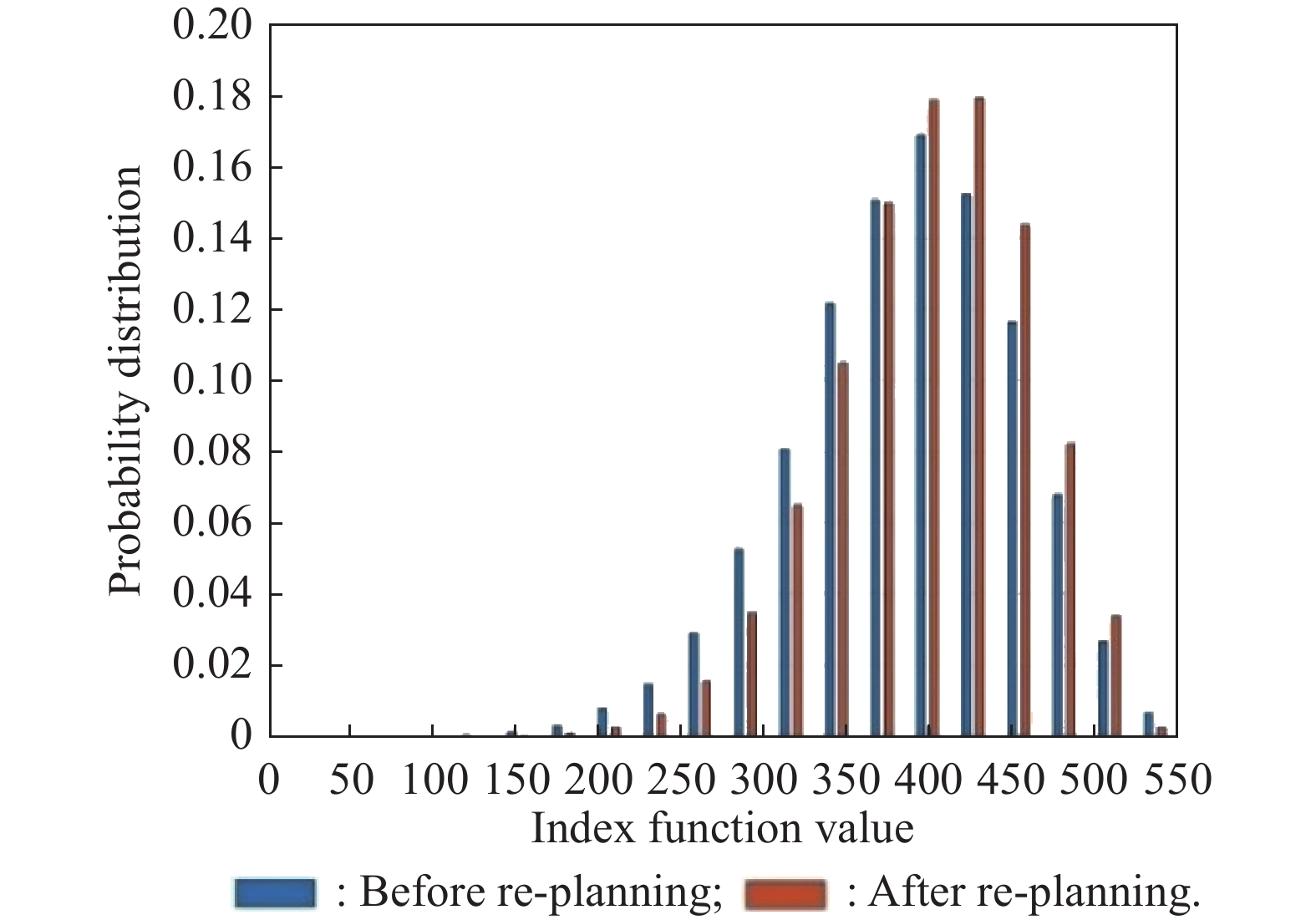
Table 11
Anti-ship missile and target allocation plan of invalid anti-ship missiles scenario"
| Anti-ship missile | Target | Anti-ship missile | Target | Anti-ship missile | Target | ||
| M6-1 | T-20 | M-9 | T-19 | M-17 | T-20 | ||
| M-2 | T-18 | M-10 | T-12 | M-18 | T-10 | ||
| M-3 | T-13 | M-11 | T-8 | M-19 | T-5 | ||
| M-4 | T-9 | M-12 | T-17 | M-20 | T-21 | ||
| M-5 | T-11 | M-13 | T-10 | M-21 | T-16 | ||
| M-6 | T-19 | M-14 | T-15 | M-22 | T-16 | ||
| M-7 | T-13 | M-15 | T-7 | M-23 | T-14 | ||
| M-8 | T-5 | M-16 | T-9 | M-24 | T-15 |
Table 12
Multi-stage attack plan of invalid anti-ship missiles scenario"
| Attack wave | M-1 | M-2 | M-3 | M-4 | M-5 | M-6 |
| 1 | − | − | − | T-9 | − | − |
| 2 | T-5→T-20 | T-5→T-18 | T-5→T-13 | − | T-5→T-11 | T-5→T-19 |
| 3 | − | − | − | − | − | − |
| Attack wave | M-7 | M-8 | M-9 | M-10 | M-11 | M-12 |
| 1 | − | T-5 | − | − | T-8 | − |
| 2 | T-5→T-13 | − | T-5→T-19 | T-5→T-12 | − | T-9→T-17 |
| 3 | − | − | − | − | − | − |
| Attack wave | M-13 | M-14 | M-15 | M-16 | M-17 | M-18 |
| 1 | − | − | T-7 | T-9 | − | − |
| 2 | T-5→T-10 | − | − | − | T-5→T-20 | T-1→T-10 |
| 3 | − | T-5→T-13→T-15 | − | − | − | − |
| Attackwave | M-19 | M-20 | M-21 | M-22 | M-23 | M-24 |
| 1 | T-5 | − | − | − | − | − |
| 2 | − | T-5→T-21 | T-5→T-16 | T-5→T-16 | T-5→T-14 | − |
| 3 | − | − | − | − | − | T-5→T-16→T-15 |
Fig 10
Index function value distribution before and after re-plan of multi-stage attack of invalid anti-ship missile scenario"
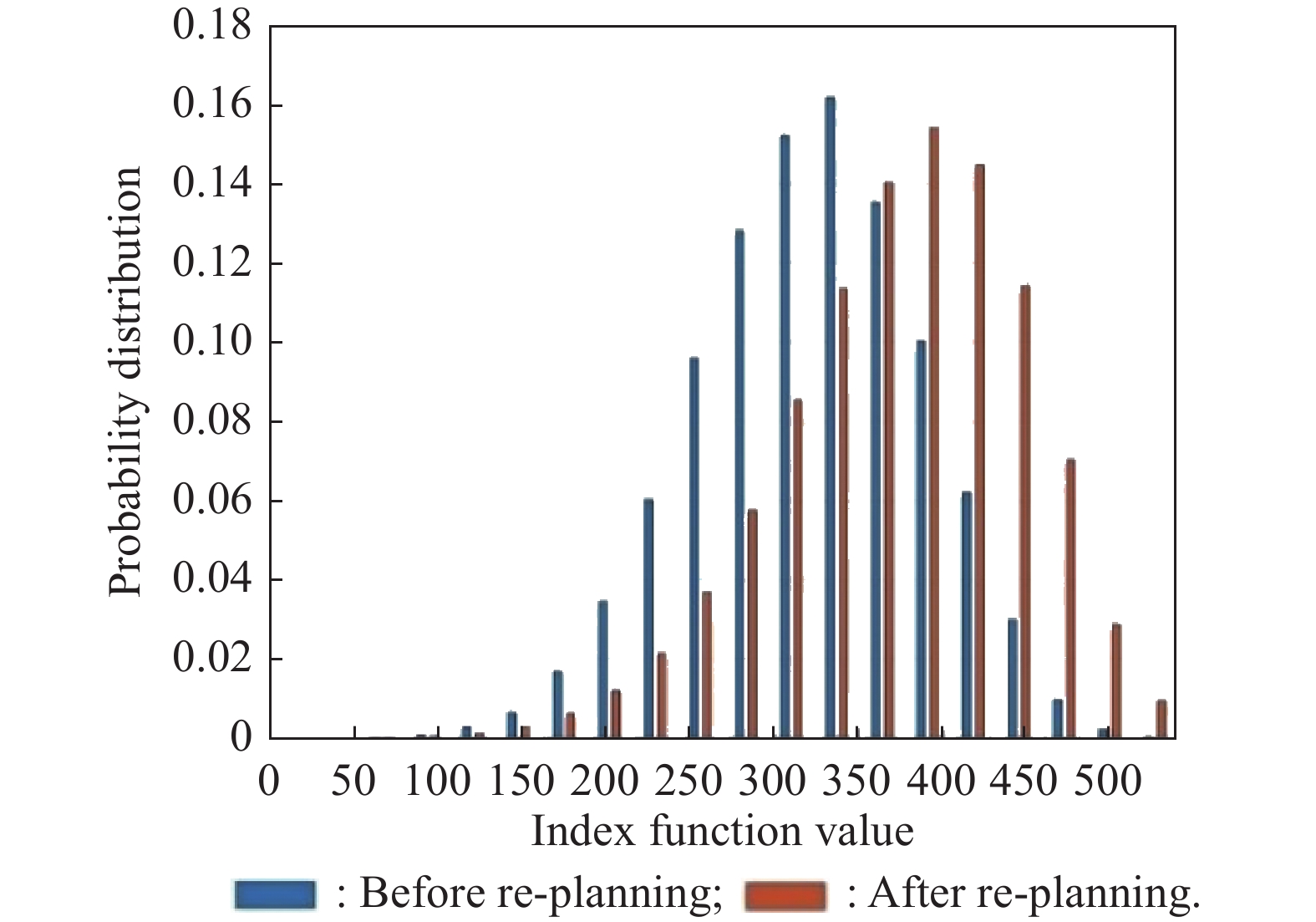
Table 13
Index comparison between before and after re-plan among different scenarios"
| Scene | Update target information | New targets increase | Target failure | Failure of anti-ship missile |
| Before re-planning | 386.66 | 314.41 | 387.18 | 321.33 |
| After re-planning | 408.28 | 395.07 | 400.00 | 374.77 |
| 1 | JIA Z R, WANG H Y, LU F X Multi-platform collaborative penetration route planning. Journal of Ballistics, 2019, 31 (4): 57- 62. |
| 2 |
LUO Y Z, DING W R, ZHANG B C Optimization of task scheduling and dynamic service strategy for multi-UAV-enabled mobile-edge computing system. IEEE Trans. on Cognitive Communications and Networking, 2021, 7 (3): 970- 984.
doi: 10.1109/TCCN.2021.3051947 |
| 3 | BRUNO G, ANTONELLI D Dynamic task classification and assignment for the management of human-robot collaborative teams in workcells. International Journal of Advanced Manufacturing Technology, 2018, 98 (9): 2415- 2427. |
| 4 |
WANG Z, LI G F, REN J Dynamic path planning for unmanned surface vehicle in complex offshore areas based on hybrid algorithm. Computer Communications, 2021, 166 (17): 49- 56.
doi: 10.1016/j.comcom.2020.11.012 |
| 5 | MAHMOUDZADEH S, POWERS D M W, ATYABI A UUV’s hierarchical DE-based motion planning in a semi dynamic underwater wireless sensor network. IEEE Trans. on Cybernetics, 2018, 49 (8): 2992- 3005. |
| 6 | WONG C, YANG E, YAN X T, et al. An optimal approach to anytime task and path planning for autonomous mobile robots in dynamic environments. Proc. of the Annual Conference Towards Autonomous Robotic Systems, 2019: 155−166. |
| 7 |
YAO W R, QI N M, WAN N, et al An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles. Aerospace Science and Technology, 2019, 86, 455- 464.
doi: 10.1016/j.ast.2019.01.061 |
| 8 | KORTIK S, SARANLI U Robotic task planning using a backchaining theorem prover for multiplicative exponential first-order linear logic. Journal of Intelligent & Robotic Systems, 2019, 96 (2): 179- 191. |
| 9 | YAN C, XIANG X J, WANG C Towards real-time path planning through deep reinforcement learning for a UAV in dynamic environments. Journal of Intelligent & Robotic Systems, 2020, 98 (2): 297- 309. |
| 10 |
ZHEN Z Y, CHEN Y, WEN L D, et al An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment. Aerospace Science and Technology, 2020, 100, 105826.
doi: 10.1016/j.ast.2020.105826 |
| 11 |
MELO A G, PINTO M F, MARCATO A L M, et al Dynamic optimization and heuristics based online coverage path planning in 3D environment for UAVs. Sensors, 2021, 21 (4): 1108.
doi: 10.3390/s21041108 |
| 12 |
ZHANG J D, CHEN Y Y, YANG Q M, et al Dynamic task allocation of multiple UAVs based on improved A-QCDPSO. Electronics, 2022, 11 (7): 1028.
doi: 10.3390/electronics11071028 |
| 13 |
YU W Y, HUANG X Q, LUO H Y, et al Auction-based consensus of autonomous vehicles for multi-target dynamic task allocation and path planning in an unknown obstacle environment. Applied Sciences, 2021, 11 (11): 5057.
doi: 10.3390/app11115057 |
| 14 |
WU X J, GAO Z Y, YUAN S, et al A dynamic task allocation algorithm for heterogeneous UUV swarms. Sensors, 2022, 22 (6): 2122.
doi: 10.3390/s22062122 |
| 15 | ZHANG L Y, ZHANG L, LIU S. Role-based collaborative task planning of heterogeneous multi-autonomous underwater vehicles. International Journal of Advanced Robotic Systems, 2019, 16(3). https://doi.org/10.1177/1729881419858536. |
| 16 | CARRENO Y, WILLNERS J S, PETILLOT Y R, et al. Situation-aware task planning for robust AUV exploration in extreme environments. Proc. of the IJCAI Workshop on Robust and Reliable Autonomy in the Wild. 2021. https://www.researchgate-net/publication/355667923. |
| 17 | LIU Y G, ZHOU B B, WANG X, et al. Dynamic lane-changing trajectory planning for autonomous vehicles based on discrete global trajectory. IEEE Trans. on Intelligent Transportation Systems, 2021, 23(7): 8513−8527. |
| 18 |
ZHENG L, GUO S X, PIAO Y, et al Collaboration and task planning of turtle-inspired multiple amphibious spherical robots. Micromachines, 2020, 11 (1): 71.
doi: 10.3390/mi11010071 |
| 19 | LIU C D, GAO B T, YU C, et al. Self-protective motion planning for mobile manipulators in a dynamic door-closing workspace. Industrial Robot, 2021, 48(6): 803−811. |
| 20 | LU L Y, TANG X H. Intelligent task resource planning based on adaptive dynamic resource composition model. Journal of Physics: Conference Series, 2019, 1176(3): 032017. |
| 21 | HEUSS L, REINHART G Integration of autonomous task planning into reconfigurable skill-based industrial robots. Proc. of the IEEE 25th International Conference on Emerging Technologies and Factory Automation, 2020, 1293- 1296. |
| 22 |
WU W B, HUANG Z D, ZENG J N, et al A fast decision-making method for process planning with dynamic machining resources via deep reinforcement learning. Journal of Manufacturing Systems, 2021, 58, 392- 411.
doi: 10.1016/j.jmsy.2020.12.015 |
| 23 |
PETROUTSATOU K, APOSTOLIDIS N, ZARKADA A, et al Dynamic planning of construction site for linear projects. Infrastructures, 2021, 6 (2): 21.
doi: 10.3390/infrastructures6020021 |
| 24 | LU P, DONG H S, ZHONG B J Robot path planning based on co-evolutionary particle swarm optimization. Computer Measurement and Control, 2013, 21 (11): 3128- 3130, 3147. |
| 25 | LI X M, BO N, DAI J J Research on trajectory planning of multi-UAV collision avoidance based on model predictive control. Journal of Northwestern Polytechnical University, 2017, 35 (3): 513- 522. |
| 26 | ZHU Z B. Research on dynamic gait planning of biped robot based on rolling optimization. Harbin: Harbin Institute of Technology, 2009. (in Chinese) |
| 27 | SOPHIE. Research on distributed online collaborative task planning technology of multiple UCAV in dynamic environment. Changsha: National University of Defense Technology, 2013. (in Chinese) |
| 28 | HUANG C Q, HUANG H Q, WANG U et al Optimization design of UCAV autonomous attack trajectory in complex and uncertain environment. Journal of Northwestern Polytechnical University, 2013, 31 (3): 331- 338. |
| 29 | HUO X H. Research on modeling and rolling optimization method of multi-UCAV dynamic collaborative task planning. Changsha: National University of Defense Technology, 2007. (in Chinese) |
| 30 | SHI J. USV online route planning considering marine environment under dynamic threat. Harbin: Harbin Engineering University, 2017. (in Chinese) |
| 31 | HUO X H, PENG H, SHEN L C Rolling optimization of multi-UCAV cooperative control in dynamic environment. Computer Engineering, 2008, 34 (4): 22- 24, 27. |
| 32 | JIA Z R, LU F X, WANG H Y. Multi-stage attack weapon target allocation method based on defense area analysis. Journal of Systems Engineering and Electronics, 2020, 31(3): 539–550. |
| 33 | JIA Z R, WANG H Y, LU F X Improved APF path planning based on obstacle convexity. Journal of Aeronautics, 2019, 40 (10): 254- 268. |
| 34 | JIA Z R, LU F X, WANG H Y Multi-platform collaborative task planning based on decoupling optimization and circulation APF. Journal of Beihang University, 2020, 46 (6): 1142- 1150. |
| [1] | Zhengrong JIA, Faxing LU, Hangyu WANG. Multi-stage attack weapon target allocation method based on defense area analysis [J]. Journal of Systems Engineering and Electronics, 2020, 31(3): 539-550. |
| [2] | Kangsheng Dong, Hanqiao Huang, Changqiang Huang, and Zhuoran Zhang. Trajectory online optimization for unmanned combat aerial vehicle using combined strategy [J]. Systems Engineering and Electronics, 2017, 28(5): 963-970. |
| [3] | He Zhaolan, Wang Mao & Liu Shuhuan. Discrete sliding mode prediction control of uncertain switched systems [J]. Journal of Systems Engineering and Electronics, 2009, 20(5): 1065-1071. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||