
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (4): 1028-1041.doi: 10.23919/JSEE.2024.000069
• CONTROL THEORY AND APPLICATION • Previous Articles
Yu LU( ), Jiongqi WANG(), Zhangming HE(), Haiyin ZHOU(), Yao XING(), Xuanying ZHOU()
), Jiongqi WANG(), Zhangming HE(), Haiyin ZHOU(), Yao XING(), Xuanying ZHOU()
Received:2022-08-11
Online:2024-08-18
Published:2024-08-06
Contact:
Zhangming HE
E-mail:luyu_gfkd@163.com;wjq_gfkd@163.com;hzmnudt@163.com;gfkd_zhy@sina.com;y_1326@163.com;Julia_chow07@163.com
About author:Supported by:Yu LU, Jiongqi WANG, Zhangming HE, Haiyin ZHOU, Yao XING, Xuanying ZHOU. System error iterative identification for underwater positioning based on spectral clustering[J]. Journal of Systems Engineering and Electronics, 2024, 35(4): 1028-1041.
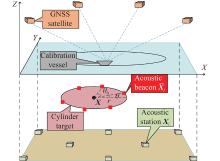
Fig 1
Underwater LBL positioning system"
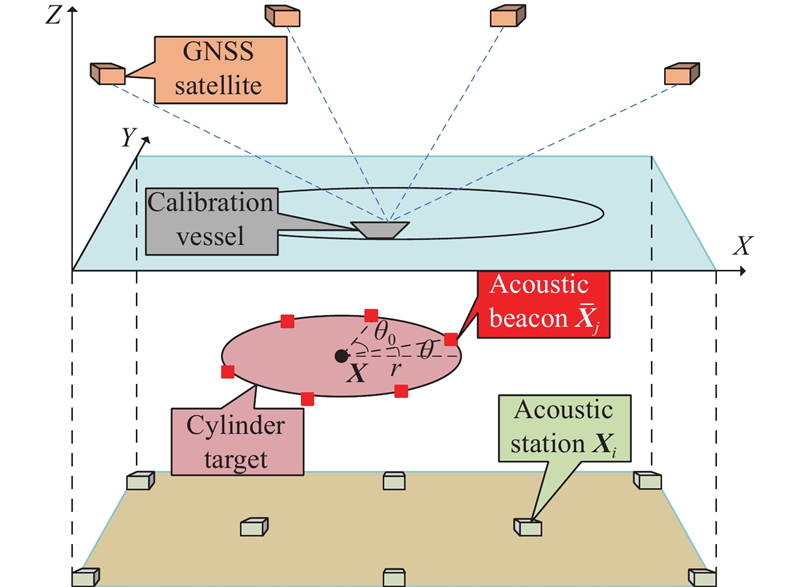
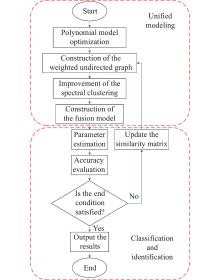
Fig 2
Algorithm process"
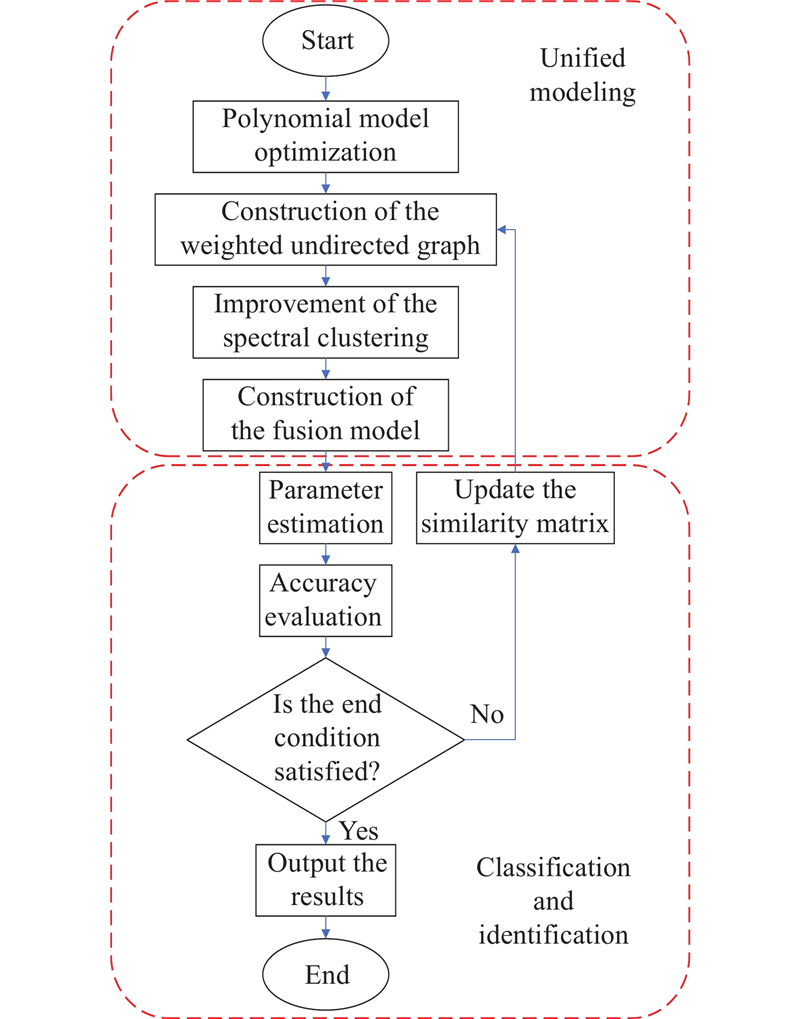
Table 1
Comparison of different polynomial models"
| Test scenario | Polynomial order | RSS | |||
| Lake test (m=11, N= | 1 | 18 | 311.28 | ||
| 2 | 21 | 16.66 | |||
| 3 | 24 | 0.24 | |||
| 4 | 27 | 13.45 | |||
| Sea test (m=9, N= | 1 | 16 | 618.73 | ||
| 2 | 19 | 564.57 | |||
| 3 | 837.81 | 22 | 0.24 | ||
| 4 | 845.77 | 25 | 8.26 |

Fig 3
Overall layout of stations and the cylinder"
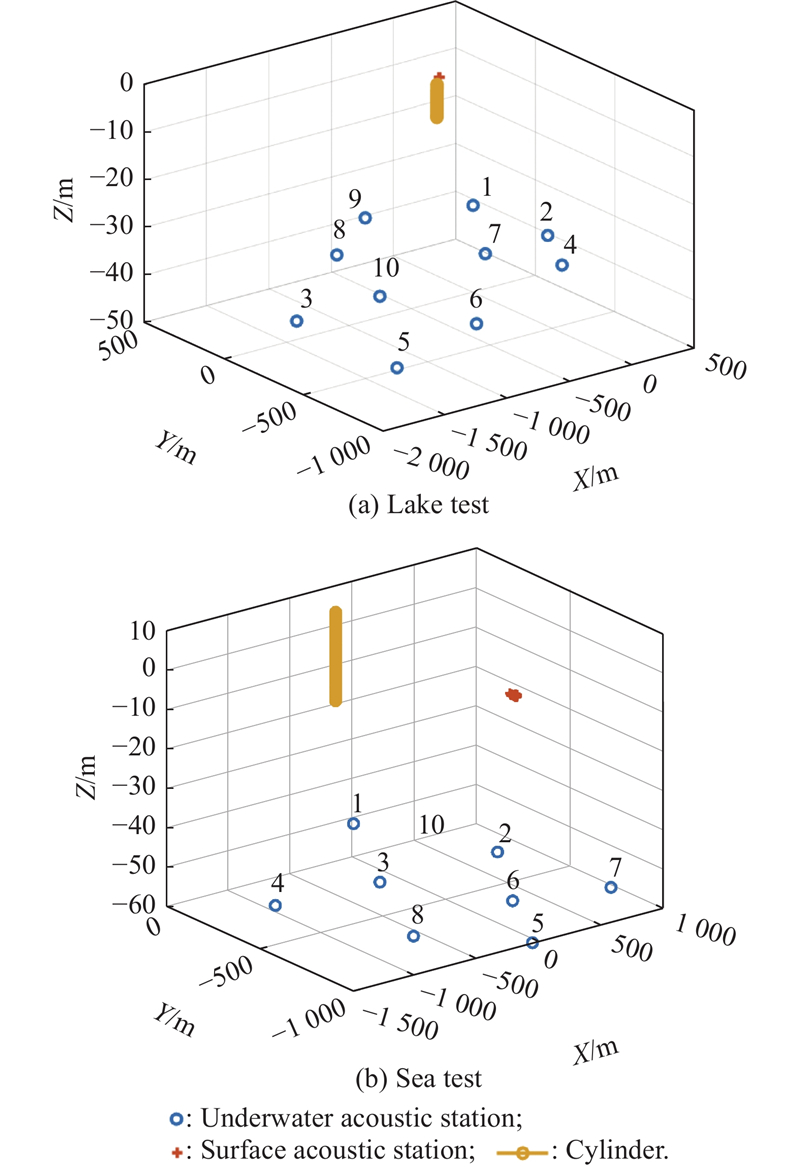
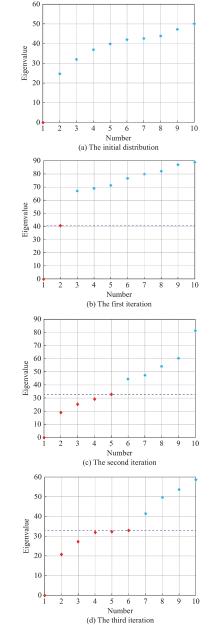
Fig 4
Eigenvalues of $\tilde {\boldsymbol{L}}$ in the lake test"
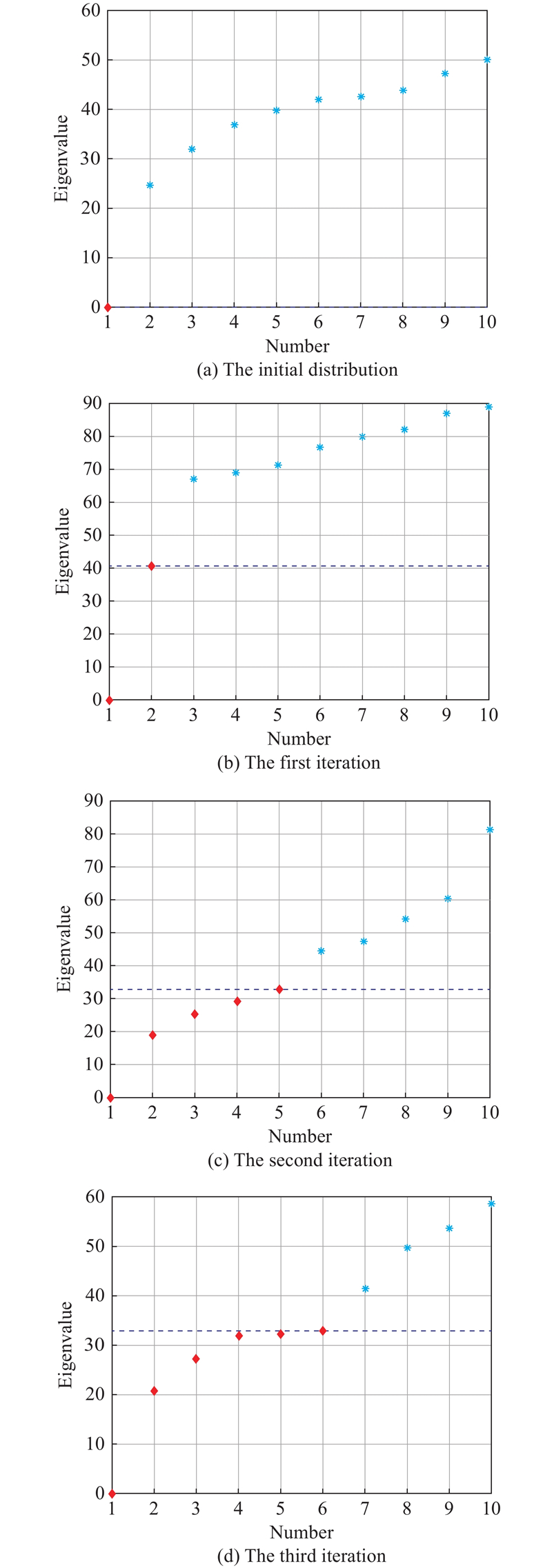

Fig 5
Eigenvalues of $\tilde {\boldsymbol{L}}$ in the sea test"
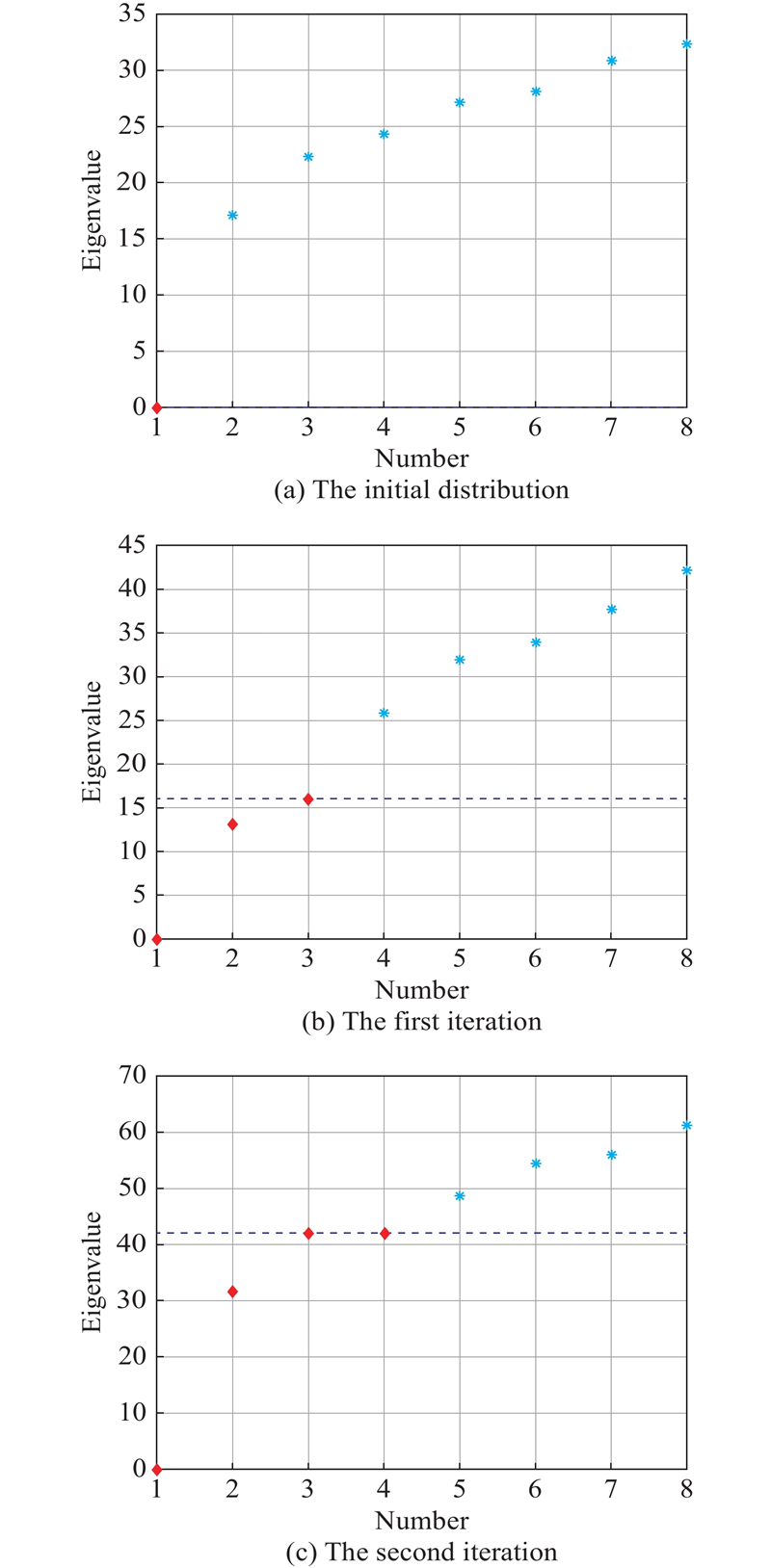
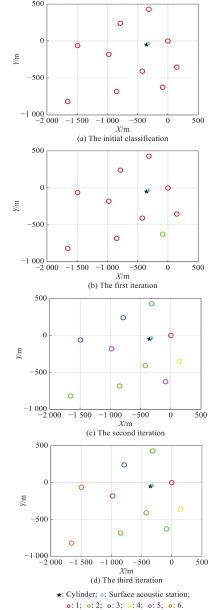
Fig 6
Classification results of the lake test"
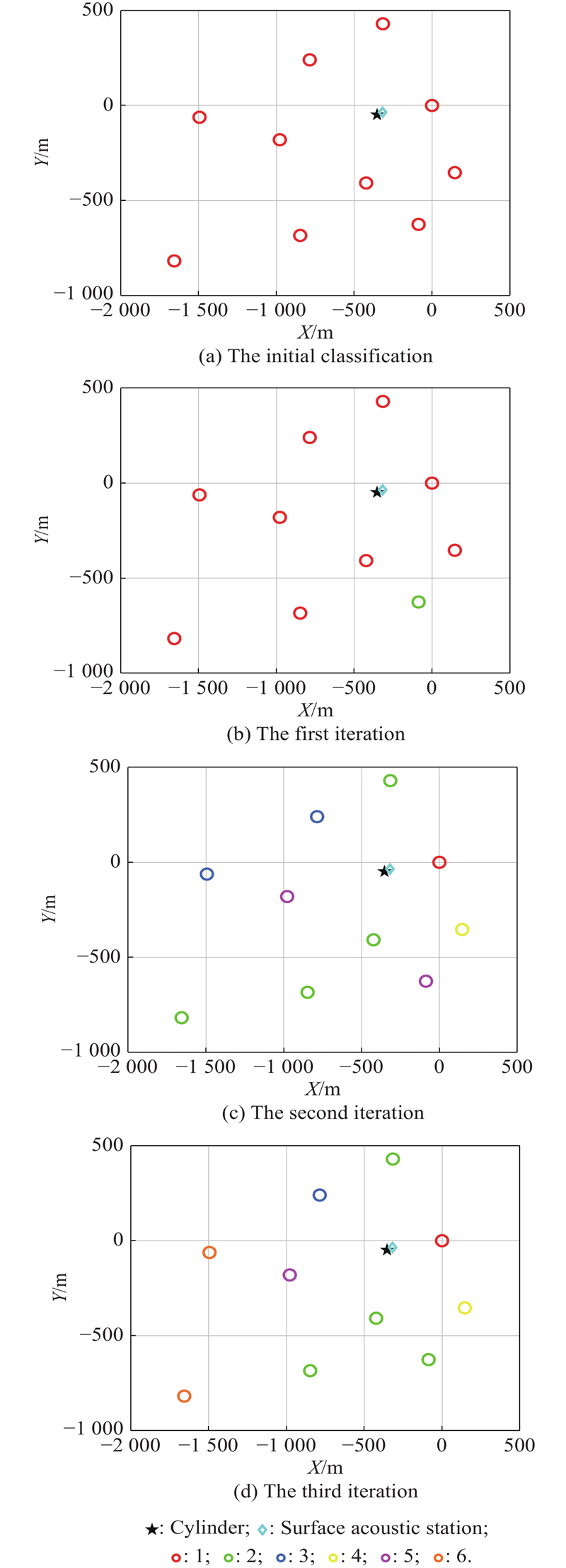
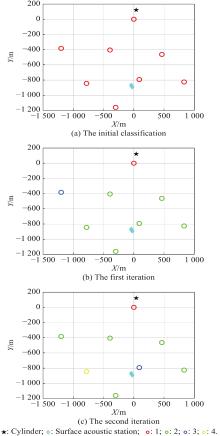
Fig 7
Classification results of the sea test"
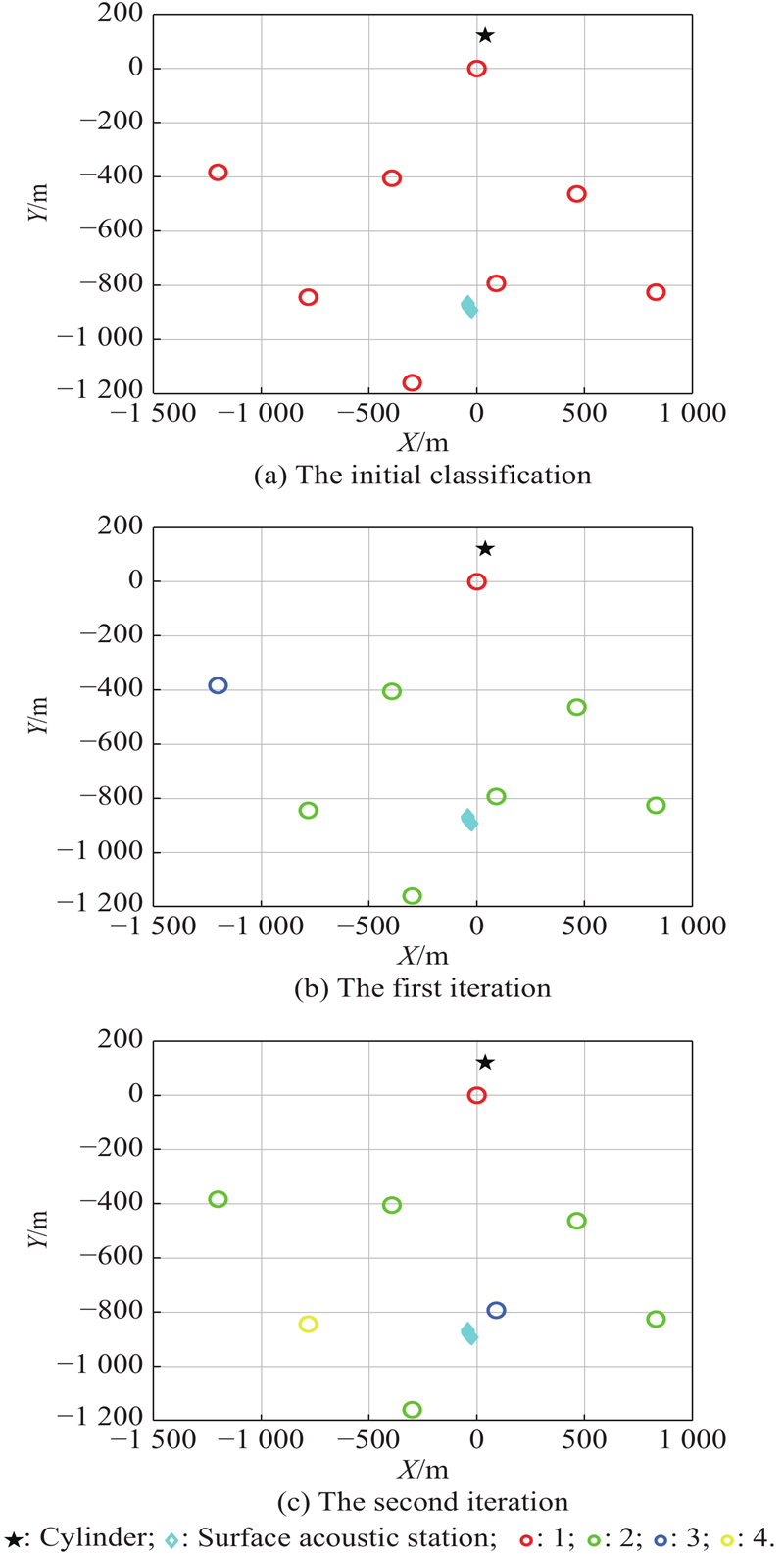

Fig 8
Results of various methods in the lake test"
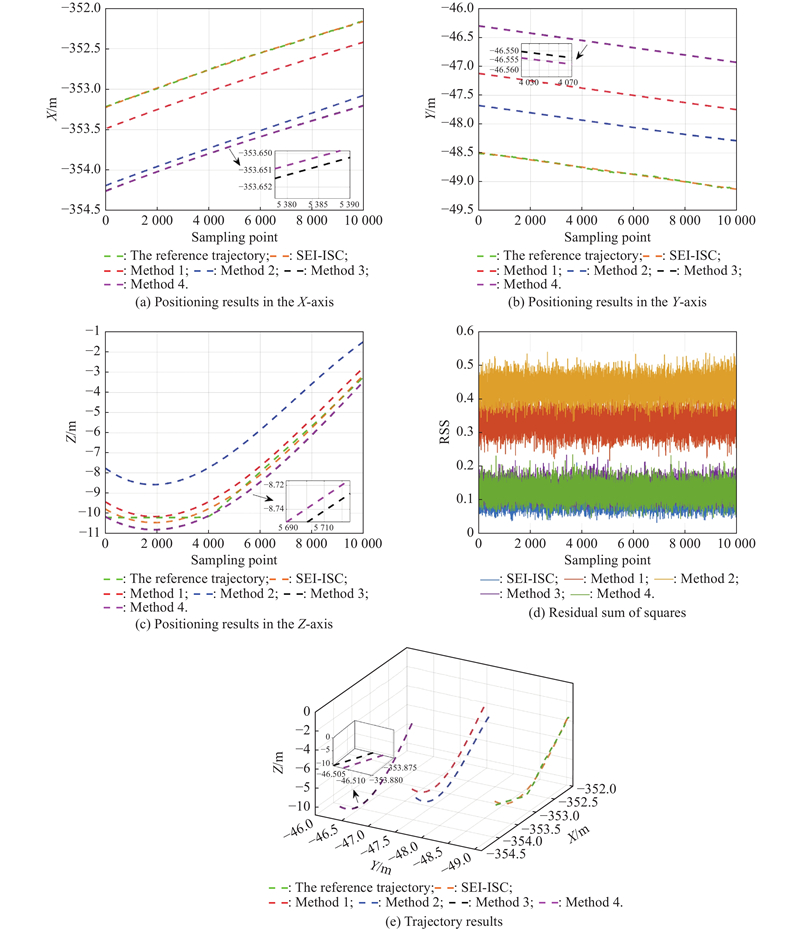

Fig 9
Results of various methods in the sea test"
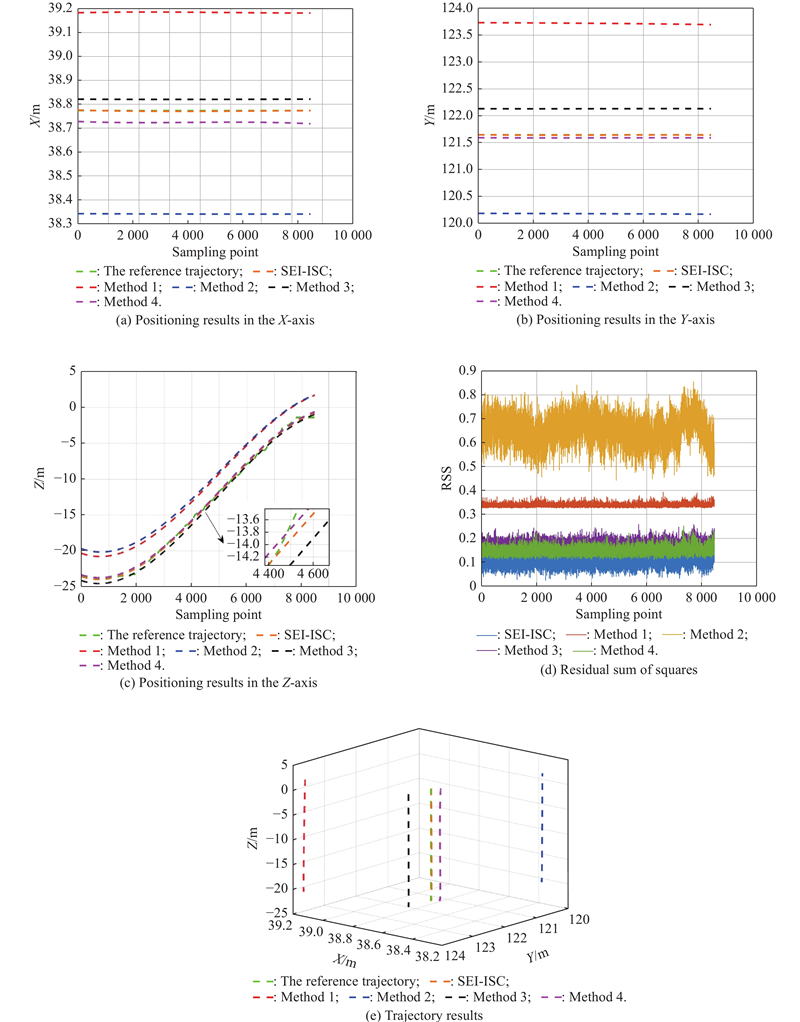
Table 2
Results of various methods"
| Test scenario | Method | GDOP | |||
| Lake test | SEI-ISC | 179.97 | |||
| Method 1 | − | ||||
| Method 2 | 74.57 | ||||
| Method 3 | 55.80 | ||||
| Method 4 | 55.90 | ||||
| Sea test | SEI-ISC | 180.24 | |||
| Method 1 | − | ||||
| Method 2 | 55.59 | ||||
| Method 3 | 158.27 | ||||
| Method 4 | 152.39 |
| 1 |
ZHANG J C, SHI C H, SUN D J, et al High-precision, limited-beacon-aided AUV localization algorithm. Ocean Engineering, 2018, 149 (1): 106- 112.
doi: 10.1016/j.oceaneng.2017.12.003 |
| 2 |
ZHANG T W, HAN G J, LIN C, et al Integration of communication, positioning, navigation and timing for deep-sea vehicles. IEEE Network, 2020, 34 (2): 121- 127.
doi: 10.1109/MNET.001.1900294 |
| 3 |
ZHANG T W, TANG J L, QIN S J, et al Review of navigation and positioning of deep-sea manned submersibles. The Journal of Navigation, 2019, 72 (4): 1021- 1034.
doi: 10.1017/S0373463319000080 |
| 4 |
WU Y H, TA X X, XIAO R C, et al Survey of underwater robot positioning navigation. Applied Ocean Research, 2019, 90 (4): 101845.
doi: 10.1016/j.apor.2019.06.002 |
| 5 |
HUANG Y, WU L H, YU Q Underwater square-root cubature attitude estimator by use of quaternion-vector switching and geomagnetic field tensor. Journal of Systems Engineering and Electronics, 2020, 31 (4): 804- 814.
doi: 10.23919/JSEE.2020.000055 |
| 6 | CHEN H H. The estimation of angular misalignments for ultra short baseline navigation systems. Part II: experimental results. The Journal of Navigation, 2013, 66(5): 773−787. |
| 7 | HAN Y F, ZHENG C E, SUN D J An optimized estimation method in long baseline acoustic positioning systems. Acta Acustica, 2017, 42 (1): 14- 20. |
| 8 | DESSET S, DAMUS R, MORASH J, et al Use of GIBs in AUVs for underwater archaeology. Sea Technology, 2003, 44 (12): 22- 27. |
| 9 |
HAN Y R, WANG B, DENG Z H, et al Point mass filter based matching algorithm in gravity aided underwater navigation. Journal of Systems Engineering and Electronics, 2018, 29 (1): 152- 159.
doi: 10.21629/JSEE.2018.01.15 |
| 10 |
BIANCO M, GERSTOFT P Dictionary learning of sound speed profiles. The Journal of the Acoustical Society of America, 2017, 141 (3): 1749- 1758.
doi: 10.1121/1.4977926 |
| 11 |
CREAMER D B On using polynomial chaos for modeling uncertainty in acoustic propagation. The Journal of the Acoustical Society of America, 2006, 119 (4): 1979- 1994.
doi: 10.1121/1.2173523 |
| 12 |
TONG J W, XU X S, ZHANG T, et al A misalignment angle error calibration method of underwater acoustic array in strapdown inertial navigation system/ultrashort baseline integrated navigation system based on single transponder mode. Review of Scientific Instruments, 2019, 90 (8): 085001.
doi: 10.1063/1.5100250 |
| 13 |
CHEN G X, LIU Y, LIU Y X, et al Adjustment of transceiver lever arm offset and sound speed bias for GNSS-acoustic positioning. Remote Sensing, 2019, 11 (13): 1606.
doi: 10.3390/rs11131606 |
| 14 | XIN M Z. Research on key technologies of GNSS-an underwater positioning and navigation. Ji’nan: Shandong University of Science and Technology, 2020. (in Chinese) |
| 15 |
YANG F L, LU X S, LI J B, et al Precise positioning of underwater static objects without sound speed profile. Marine Geodesy, 2011, 34 (2): 138- 151.
doi: 10.1080/01490419.2010.518501 |
| 16 |
XU P L, ANDO M, TADOKORO K Precise, three-dimensional seafloor geodetic deformation measurements using difference techniques. Earth, Planets and Space, 2005, 57 (9): 795- 808.
doi: 10.1186/BF03351859 |
| 17 |
GENG X Y, ZIELINSKI A Precise multibeam acoustic bathymetry. Marine Geodesy, 1999, 22 (3): 157- 167.
doi: 10.1080/014904199273434 |
| 18 |
XIN M Z, YANG F L, WANG F X, et al A TOA/AOA underwater acoustic positioning system based on the equivalent sound speed. The Journal of Navigation, 2018, 71 (6): 1431- 1440.
doi: 10.1017/S037346331800036X |
| 19 | GE T Z. Research on EMBET method for range task evaluation. Harbin: Harbin Institute of Technology, 2017. (in Chinese) |
| 20 |
YANG J, WANG J Tag clustering algorithm LMMSK: improved K-means algorithm based on latent semantic analysis. Journal of Systems Engineering and Electronics, 2017, 28 (2): 374- 384.
doi: 10.21629/JSEE.2017.02.18 |
| 21 | SHEN X L, SONG Z Y, FAN H Q, et al Fast density peak-based clustering algorithm for multiple extended target tracking. Journal of Systems Engineering and Electronics, 2019, 30 (3): 435- 447. |
| 22 | QIAN K C, WAN Y, FAN Y C, et al. A method of measuring data fusion based on EMBET. Proc. of the IEEE 6th International Conference on Computer and Communication Systems, 2021: 33−37. |
| 23 |
LI X H, ZHAO C X, YU J, et al Underwater bearing-only and bearing-Doppler target tracking based on square root unscented Kalman filter. Entropy, 2019, 21 (8): 740.
doi: 10.3390/e21080740 |
| 24 | BIANCHI F M, GRATTAROLA D, ALIPPI C. Spectral clustering with graph neural networks for graph pooling. Proc. of the International Conference on Machine Learning, 2020: 874−883. |
| [1] | Jing CAI, Wei HU, Kunye CAI. Accuracy analysis of a single-fault Markov model for FADEC system [J]. Journal of Systems Engineering and Electronics, 2019, 30(5): 1044-1052. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||