
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (4): 987-998.doi: 10.23919/JSEE.2024.000084
• CONTROL THEORY AND APPLICATION • Previous Articles
Hao CHENG1( ), Shuang GAO1(), Xiaowen CAI2(), Yuxuan WANG1,*(), Jie WANG3()
), Shuang GAO1(), Xiaowen CAI2(), Yuxuan WANG1,*(), Jie WANG3()
Received:2023-03-13
Accepted:2023-07-09
Online:2024-08-18
Published:2024-08-06
Contact:
Yuxuan WANG
E-mail:13225517091@163.com;gaoshuang@buaa.edu.cn;caixiaowen@xtu.edu.cn;sy2117129@buaa.edu.cn;wangquiler@163.com
About author:Hao CHENG, Shuang GAO, Xiaowen CAI, Yuxuan WANG, Jie WANG. Method of improving pedestrian navigation performance based on chest card[J]. Journal of Systems Engineering and Electronics, 2024, 35(4): 987-998.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
Pedestrian movement characteristics map"
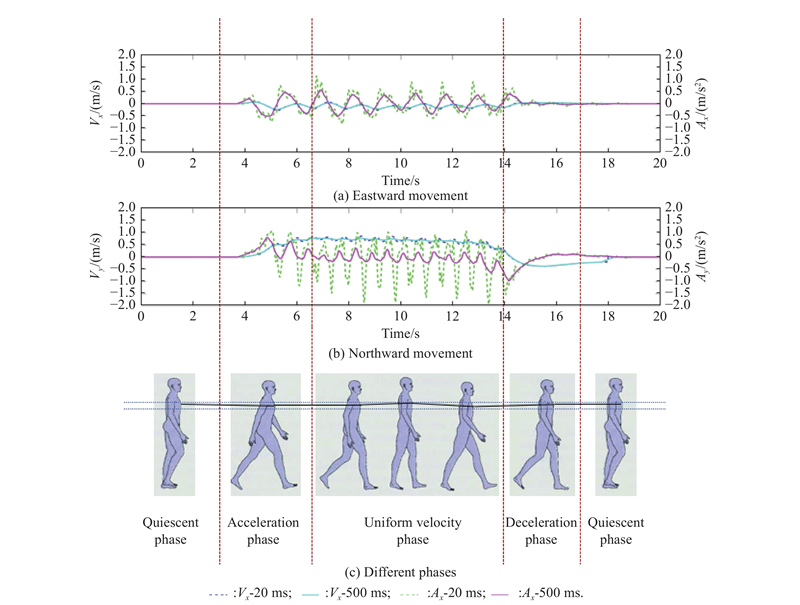
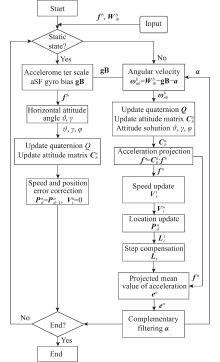
Fig 2
Scheme chart of chest card complementary correction pedestrian navigation method"
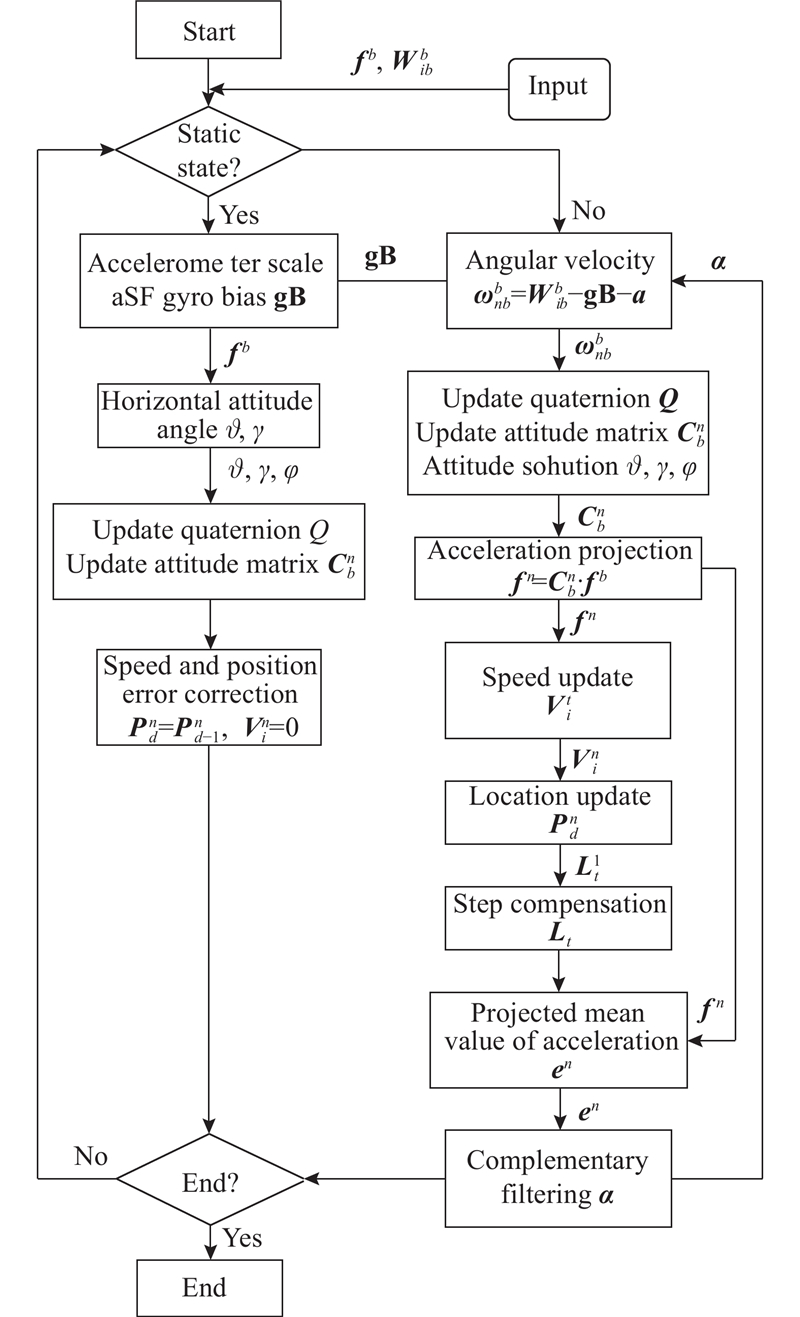

Fig 3
Block diagram of error transfer of complementary filtering system"
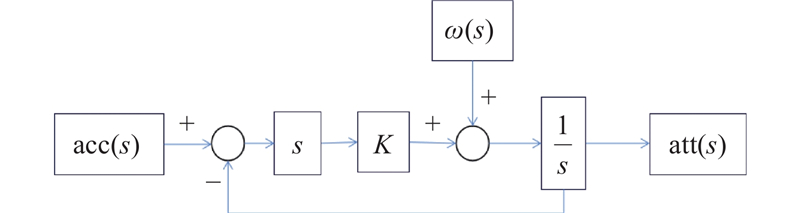
Fig 4
Relationship between K value and convergence time"
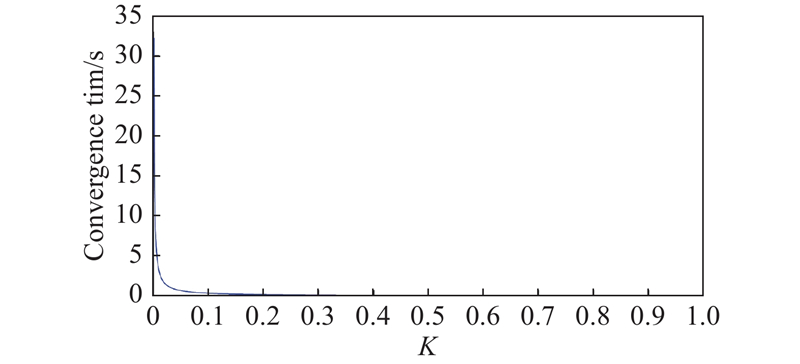
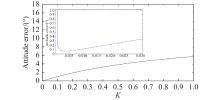
Fig 5
Simulation results of K value and attitude error"
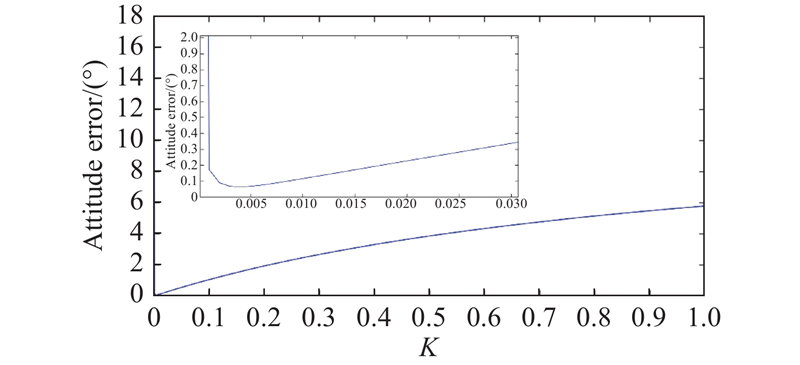
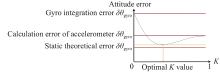
Fig 6
Relationship between K value and attitude error"
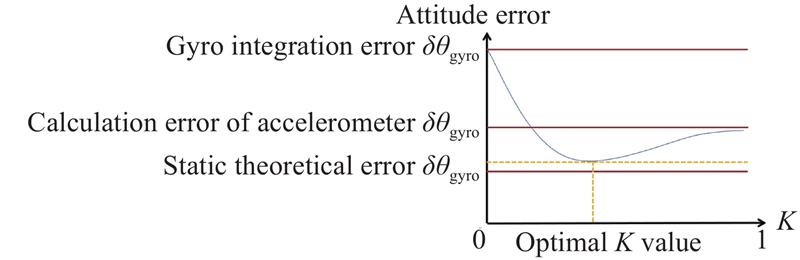
Table 1
Experimental equipment parameters"
| Device | Performance | Value |
| Gyroscope | Zero bias stability/(°/s) | |
| Scale factor nonlinearity/ppm | ||
| Noise factor/ | ||
| Accelerometer | Zero bias stability/mg | |
| Scale factor nonlinearity/ppm | ||
| Noise factor/ |
Table 2
Experimental results statistics m"
| Case | Distance traveled | PIWSLCS | TCFWSLC | ICFWSLC |
| 1 | 32 | 2.48 | 1.86 | 1.07 |
| 2 | 44 | 4.95 | 5.72 | 2.01 |
| 3 | 46 | 3.94 | 3.75 | 2.08 |
| 4 | 48 | 4.08 | 3.61 | 1.29 |
| 5 | 45 | 6.55 | 3.98 | 2.05 |

Fig 7
Results of five cases"
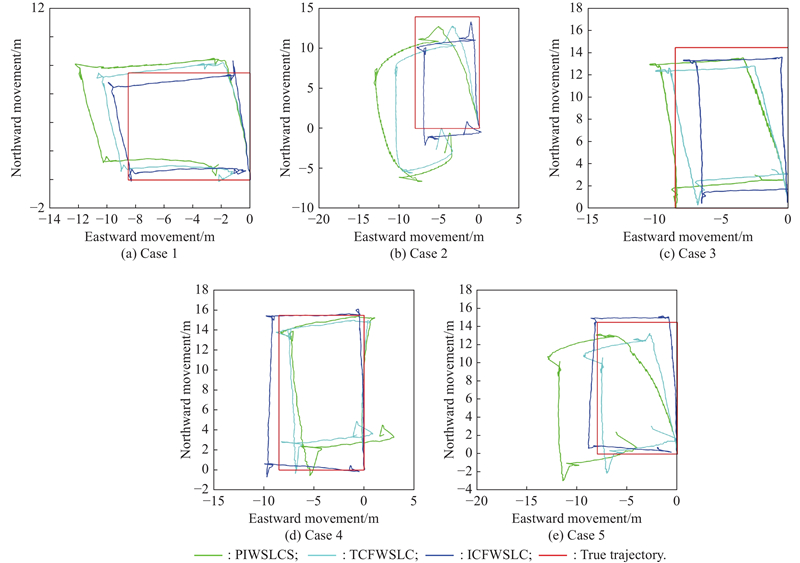
Fig 8
Positioning error"
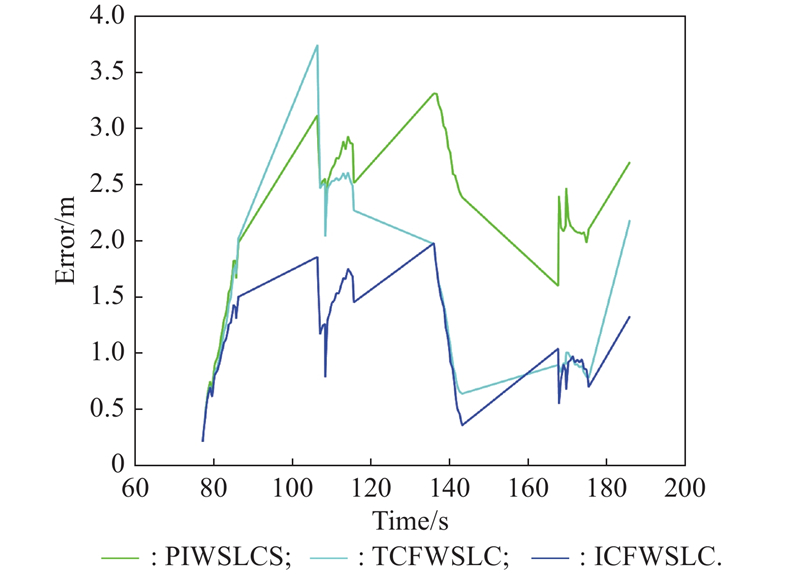
Fig 9
Trajectory plots for different K values"
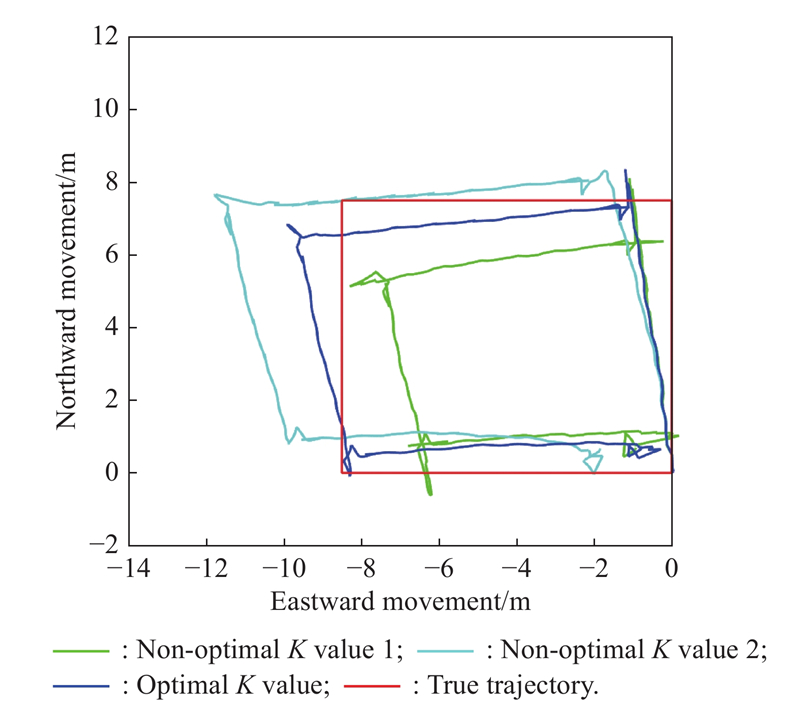

Fig 10
Horizontal speed comparison"
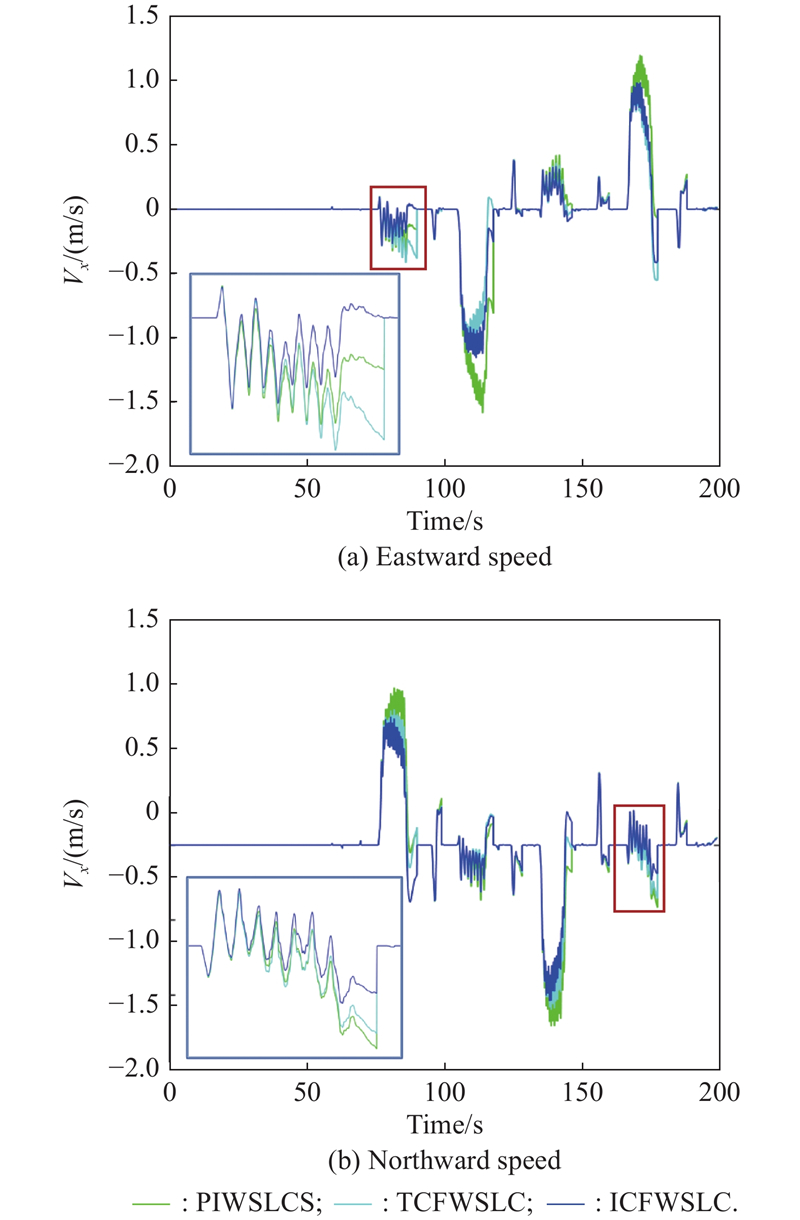
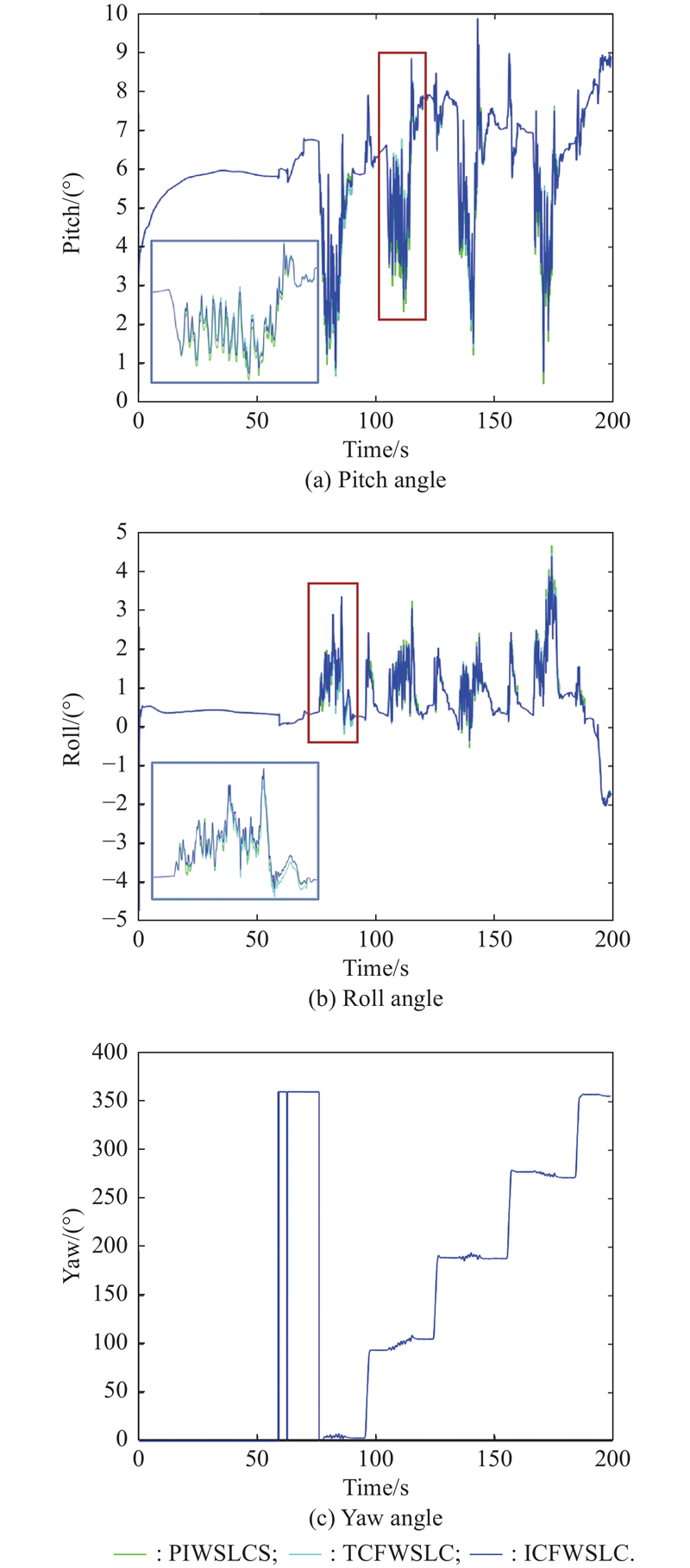
Fig 11
Attitude comparison"
| 1 |
ALSHAMI I H, AHMAD N A, SAHIBUDDIN S, et al Adaptive indoor positioning model based on WLAN-fingerprinting for dynamic and multi-floor environments. Sensors, 2017, 17 (8): 1789.
doi: 10.3390/s17081789 |
| 2 |
KOLAKOWSKI J, DJAJA-JOSKO V, KOLAKOWSKI M, et al UWB/BLE tracking system for elderly people monitoring. Sensors, 2020, 20 (6): 1574.
doi: 10.3390/s20061574 |
| 3 |
LIU F, ZHANG J X, WANG J, et al An UWB/vision fusion scheme for determining pedestrians’ indoor location. Sensors, 2020, 20 (4): 1139.
doi: 10.3390/s20041139 |
| 4 |
FARAGHER R, HARLE R Location fingerprinting with bluetooth low energy beacons. IEEE Journal on Selected Areas in Communications, 2015, 33 (11): 2418- 2428.
doi: 10.1109/JSAC.2015.2430281 |
| 5 |
ABDULRAHMAN A, ABDULMALIK A S, MANSOUR A, et al Ultra wideband indoor positioning technologies: analysis and recent advances. Sensors, 2016, 16 (5): 707.
doi: 10.3390/s16050707 |
| 6 |
GU D, CHEN K S Design and performance evaluation of wiimote-based two-dimensional indoor localization systems for indoor mobile robot control. Measurement, 2015, 66, 95- 108.
doi: 10.1016/j.measurement.2015.01.009 |
| 7 | GARD V, JHAMB M A review of wireless sensor network on localization techniques. International Journal of Engineering Trends and Technology, 2013, 4 (4): 1049- 1053. |
| 8 | HUSSIEN H M, SHIFERAW Y N, TESHALE N B. Survey on indoor positioning techniques and systems. Proc. of the International Conference on Information and Communication Technology for Develoment for Africa, 2018: 46−55. |
| 9 |
HAN H, WANG J, LIU F, et al An emergency seamless positioning technique based on ad hoc UWB networking using robust EKF. Sensors, 2019, 19 (14): 3135.
doi: 10.3390/s19143135 |
| 10 | GHENDIR S, SBAA S, AL-SHERBAZ A, et al Towards 5G wireless systems: a modified rake receiver for UWB indoor multipath channels. Physical Communication, 2019, 35 (8): 100715. |
| 11 |
KIM Y H, CHOI M J, KIM E J, et al Magnetic-map-matching-aided pedestrian navigation using outlier mitigation based on multiple sensors and roughness weighting. Sensors, 2019, 19 (21): 4782.
doi: 10.3390/s19214782 |
| 12 |
YU N, LI Y F, MA X F, et al Comparison of pedestrian tracking methods based on foot-and waist-mounted inertial sensors and handheld smartphones. IEEE Sensors Journal, 2019, 19 (18): 8160- 8173.
doi: 10.1109/JSEN.2019.2919721 |
| 13 |
ELWELL J Inertial navigation for the urban warrior. Proc. of the Digitization of the Battlesapce IV, 1999, 3709, 196- 204.
doi: 10.1117/12.351609 |
| 14 |
FOXLIN E Pedestrian tracking with shoe-mounted inertial sensor. IEEE Computer Graphics and Applications, 2005, 25 (6): 38- 46.
doi: 10.1109/MCG.2005.140 |
| 15 | MENG X L, SUN S Y, JI L Y, et al. Estimation of center of mass displacement based on gait analysis. Proc. of the IEEE International Conference on Body Sensor Networks, 2011: 150−155. |
| 16 | WANG Y S, SHKEL A M Adaptive threshold for zero-velocity detector in ZUPT-aided pedestrian inertial navigation. IEEE Sensors Letters, 2019, 3 (11): 1- 4. |
| 17 |
HU G H, ZHANG W Z, WAN H, et al Improving the heading accuracy in indoor pedestrian navigation based on a decision tree and Kalman filter. Sensors, 2020, 20 (6): 1578.
doi: 10.3390/s20061578 |
| 18 | DENG Z H, WANG P Y, LIU T, et al Foot-mounted pedestrian navigation algorithm based on BOR/MINS integrated framework. IEEE Trans. on Industrial Electronics, 2019, 67 (5): 3980- 3989. |
| 19 | AHMAD I, HADRI A E, BENZIANE L, et al Globally asymptotic attitude estimation for accelerated aerial vehicles. Aerospace Science and Technology, 2018, 84, 1175- 1181. |
| 20 |
NARKHEDE P, JOSEPH R A N, KUMAR V, et al Least square estimation-based adaptive complimentary filter for attitude estimation. Transactions of the Institute of Measurement and Control, 2019, 41 (1): 235- 245.
doi: 10.1177/0142331218755234 |
| 21 | LI Z, XU X B, JI M X, et al Pedestrian positioning based on dual inertial sensors and foot geometric constraints. IEEE Trans. on Industrial Electronics, 2021, 69 (6): 6401- 6409. |
| 22 | LAVERNE M, GEORGE M, LORD D, et al. Experimental validation of foot to foot range measurements in pedestrian tracking. Proc. of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation, 2011: 1386−1393. |
| 23 | TJHAI C, O'KEEFE K. Comparing heading estimates from multiple wearable inertial and magnetic sensors mounted on lower limbs. Proc. of the IEEE International Conference on Indoor Positioning and Indoor Navigation, 2018: 206−212. |
| [1] | Haijian XUE, Tao WANG, Xinghui CAI, Jintao WANG, Fei LIU. Anti-interference self-alignment algorithm by attitude optimization estimation for SINS on a rocking base [J]. Journal of Systems Engineering and Electronics, 2023, 34(5): 1333-1342. |
| [2] | Jing GUI, Heming ZHAO, Xiang XU. Heading constraint algorithm for foot-mounted PNS using low-cost IMU [J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 727-736. |
| [3] | Xudong YU, Zichao WANG, Huiying FAN, Guo WEI, Lin WANG. Suppression of the G-sensitive drift of laser gyro in dual-axis rotational inertial navigation system [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 822-830. |
| [4] | Xiaolin NING, Weiping YUAN, Yanhong LIU. A tightly coupled rotational SINS/CNS integrated navigation method for aircraft [J]. Journal of Systems Engineering and Electronics, 2019, 30(4): 770-782. |
| [5] | Yurong HAN, Bo WANG, Zhihong DENG, Mengyin FU. Point mass filter based matching algorithm in gravity aided underwater navigation [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 152-159. |
| [6] | Gongmin Yan, Xi Sun, Jun Weng, Qi Zhou, and Yongyuan Qin. Time-asynchrony identification between inertial sensors in SIMU [J]. Journal of Systems Engineering and Electronics, 2015, 26(2): 346-352. |
| [7] | Tong Zhang, Kang Chen, Wenxing Fu, Yunfeng Yu, and Jie Yan. Optimal two-iteration sculling compensation mathematical framework for SINS velocity updating [J]. Journal of Systems Engineering and Electronics, 2014, 25(6): 1065-1071. |
| [8] | Yu Chen and Yan Zhao*. New rapid transfer alignment method for SINS of airborne weapon systems [J]. Journal of Systems Engineering and Electronics, 2014, 25(2): 281-287. |
| [9] | Lailiang Song, Chunxi Zhang, and Jiazhen Lu. Self-alignment of full skewed RSINS: observability analysis and full-observable Kalman filter [J]. Journal of Systems Engineering and Electronics, 2014, 25(1): 104-114. |
| [10] | Guo Wei, Xudong Yu, and Xingwu Long. Novel approach for identifying Z-axis drift of RLG based on GA-SVR model [J]. Journal of Systems Engineering and Electronics, 2014, 25(1): 115-121. |
| [11] | Xiuzhi Wu, Jizhou Lai, Min Liu, and Pin Lv. Homologous fault monitoring technology of redundant INS in airborne avionics systems [J]. Journal of Systems Engineering and Electronics, 2013, 24(6): 1038-1044. |
| [12] | Jingshuo Xu, Yongjun Wang, and Zhicai Xiao. Rapid transfer alignment for SINS of carrier craft [J]. Journal of Systems Engineering and Electronics, 2013, 24(2): 303-308. |
| [13] | Weiren Wu, Xiaolin Ning, and Lingling Liu. New celestial assisted INS initial alignment method for lunar explorer [J]. Journal of Systems Engineering and Electronics, 2013, 24(1): 108-117. |
| [14] | Honglei Qin, Li Cong, and Xingli Sun. Accuracy improvement of GPS/MEMS-INS integrated navigation system during GPS signal outage for land vehicle navigation [J]. Journal of Systems Engineering and Electronics, 2012, 23(2): 256-264. |
| [15] | Wei Sun and Feng Sun. Novel approach to GPS/SINS integration for IMU alignment [J]. Journal of Systems Engineering and Electronics, 2011, 22(3): 513-518. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||