
Journal of Systems Engineering and Electronics ›› 2024, Vol. 35 ›› Issue (5): 1304-1314.doi: 10.23919/JSEE.2024.000102
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Mengjing GAO1( ), Tian YAN1,*(), Bingjie HAN2(), Haoyu CHENG1(), Wenxing FU1(), Bo HAN3()
), Tian YAN1,*(), Bingjie HAN2(), Haoyu CHENG1(), Wenxing FU1(), Bo HAN3()
Received:2022-09-29
Accepted:2023-11-07
Online:2024-10-18
Published:2024-11-06
Contact:
Tian YAN
E-mail:gao_mj@mail.nwpu.edu.cn;tianyan@nwpu.edu.cn;bjhan007@aliyun.com;chenghaoyu@nwpu.edu.cn;wenxingfu@nwpu.edu.cn;295629469@qq.com
About author:Supported by:Mengjing GAO, Tian YAN, Bingjie HAN, Haoyu CHENG, Wenxing FU, Bo HAN. Cooperative guidance law based on super-twisting observer for target maneuvering[J]. Journal of Systems Engineering and Electronics, 2024, 35(5): 1304-1314.
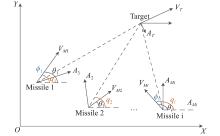
Fig 1
Schematic diagram of the relative motion relationship between multiple missiles and target"
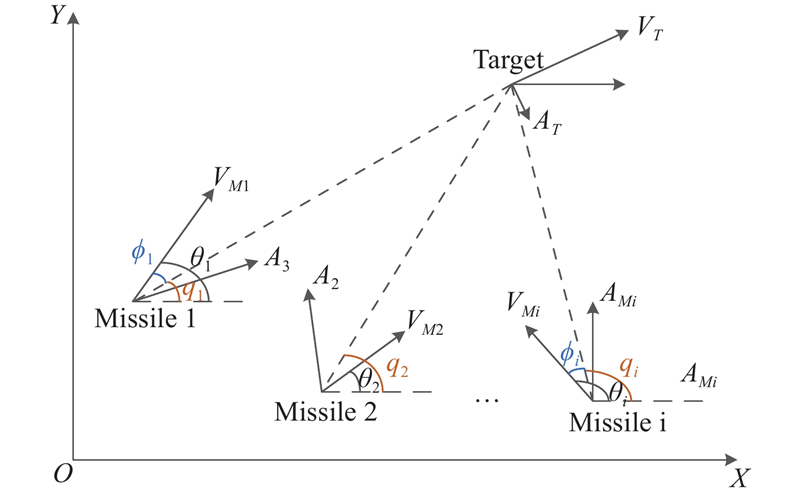

Fig 2
Topology diagram of communication between multiple missiles"
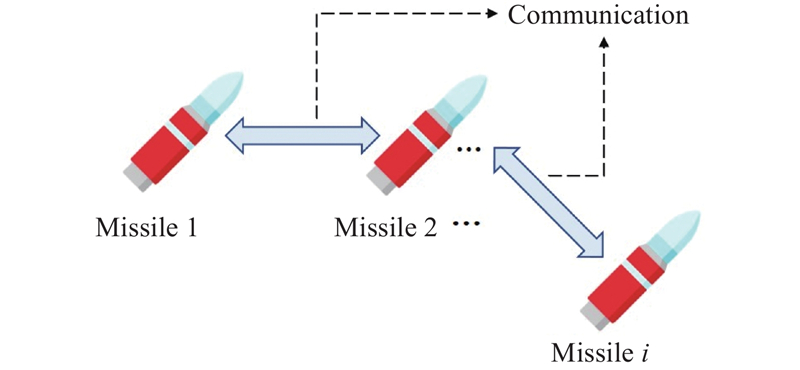

Fig 3
Communication topology diagram"
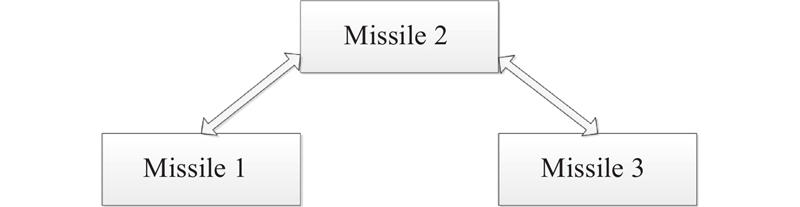
Table 1
Initial condition setting of cooperative missile simulation in case 1"
| Initial quantity | Missile 1 | Missile 2 | Missile 3 |
| Initial coordinate/m | |||
| Initial heading angle/rad | |||
| Initial velocity/(m/s) | 300 | 300 | 300 |
Fig 4
Two-dimensional plane diagram of cooperative guidance"
Fig 5
Relative distance between target and missile"
Fig 6
Heading angle curve with time"
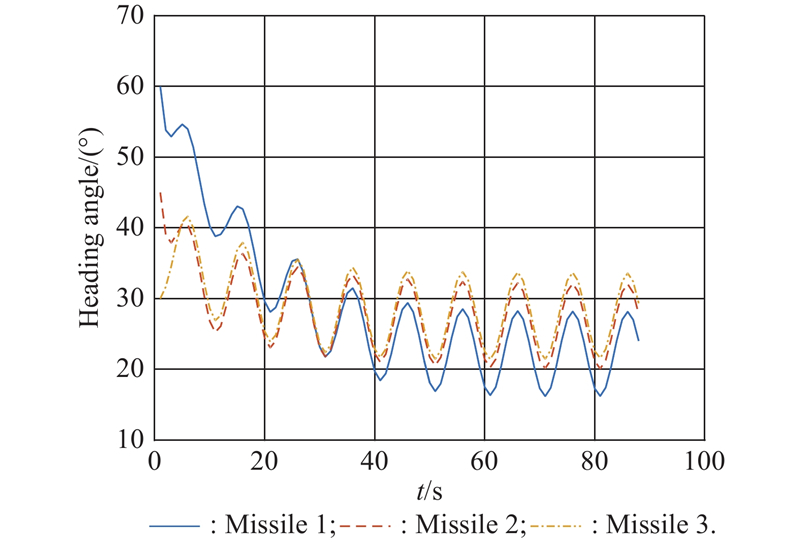
Fig 7
LOS angle curve with time"
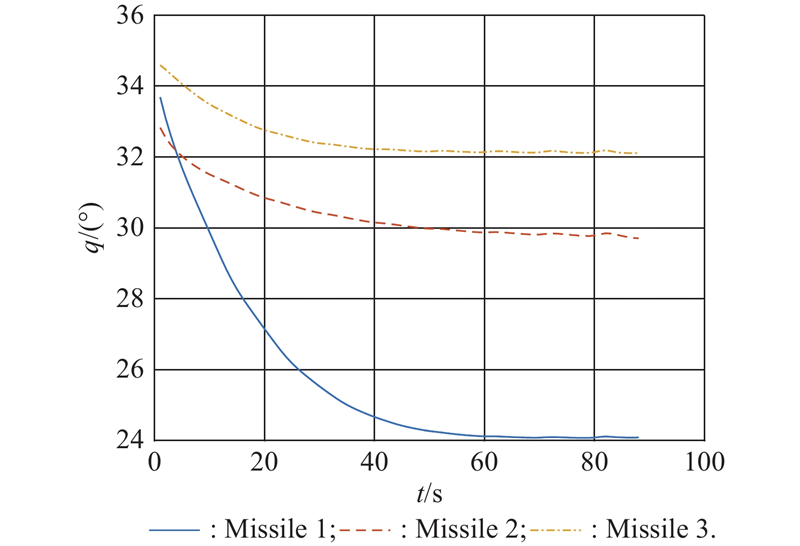
Fig 8
Acceleration curve with time"
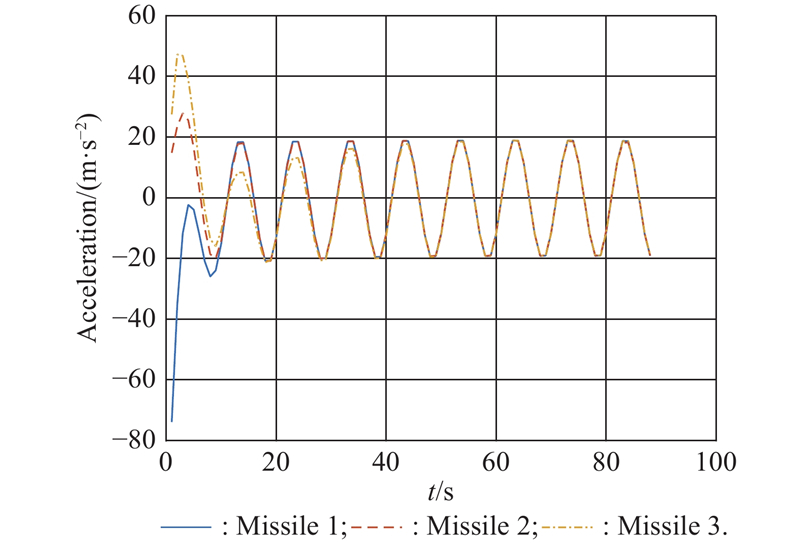
Fig 9
Comparison of the estimated LOS angle with the true value"
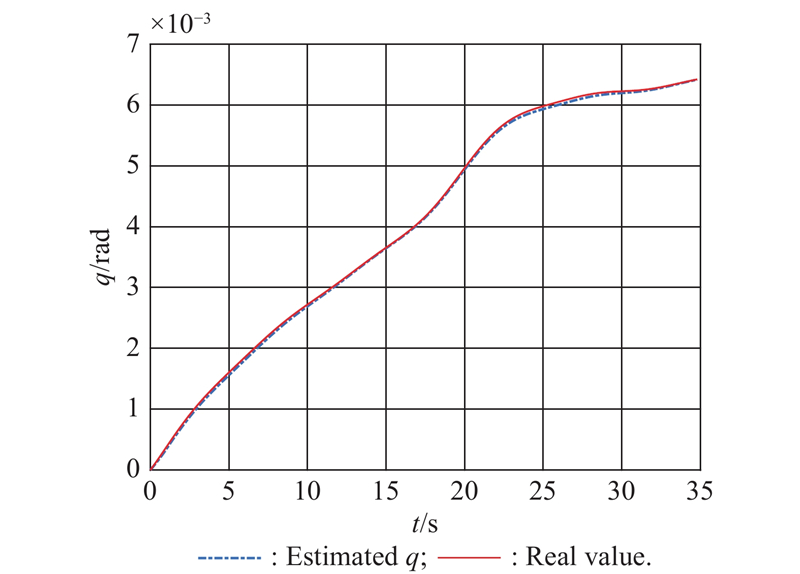
Fig 10
Error curve of the super-twisting observer"
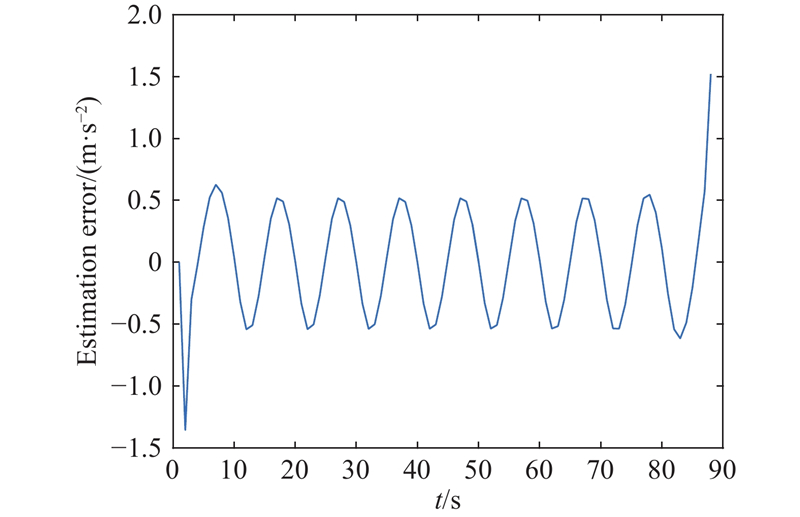
Table 2
Initial condition setting of cooperative missile simulation in case 2"
| Initial quantity | Missile 1 | Missile 2 | Missile 3 |
| Initial coordinate/m | |||
| Initial heading angle/rad | |||
| Initial velocity/(m/s) | 400 | 500 | 500 |
Fig 11
Two-dimensional plane diagram of cooperative guidance in case 2"
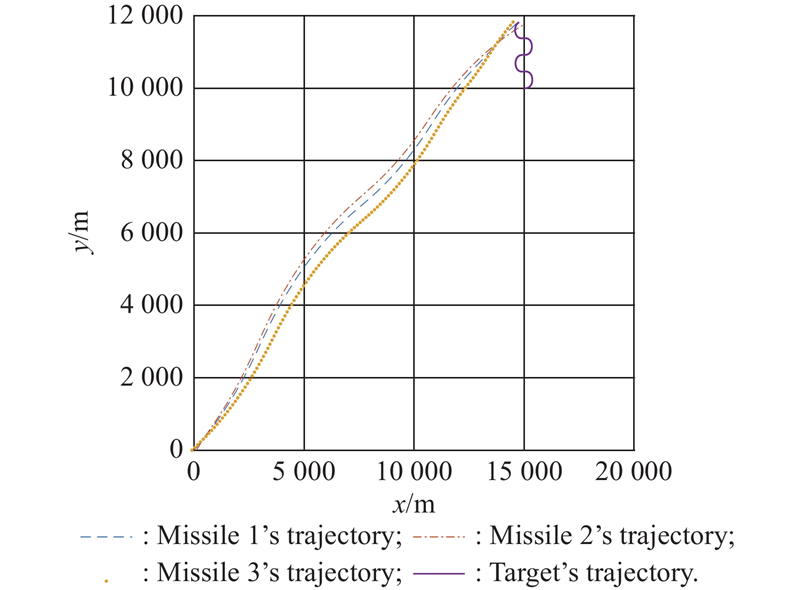
Fig 12
Relative distance between target and missile in case 2"
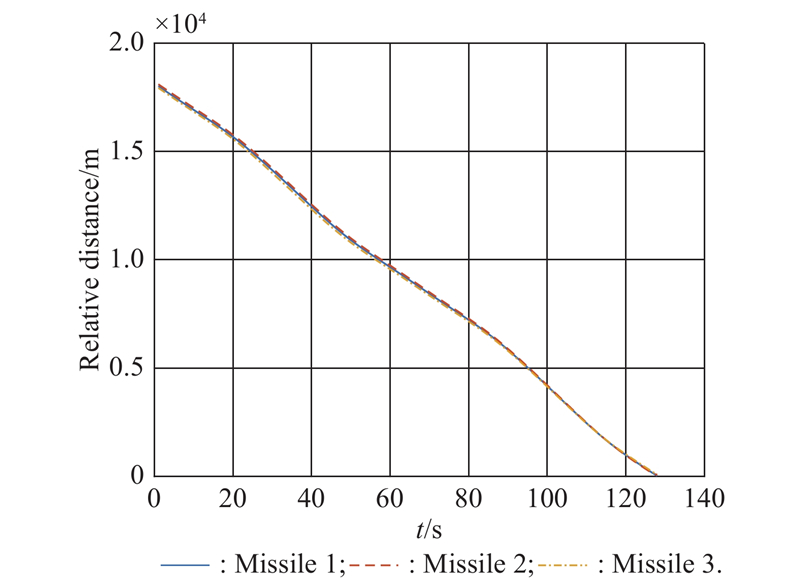
Fig 13
Acceleration curve with time in case 2"
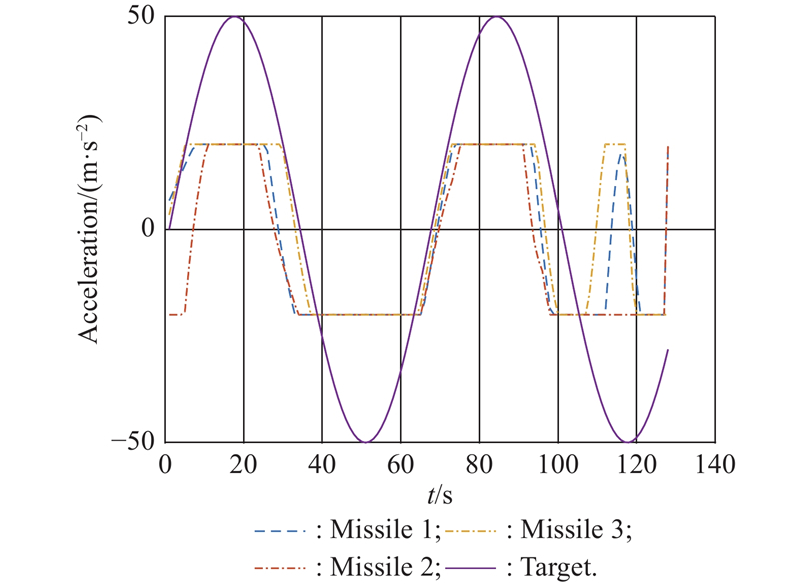
Table 3
Initial condition setting of cooperative missile simulation in case 3"
| Initial quantity | Missile 1 | Missile 2 | Missile 3 |
| Initial coordinate/m | |||
| Initial heading angle/rad | |||
| Initial velocity/(m/s) | 500 | 500 | 500 |
Fig 14
Two-dimensional plane diagram of cooperative guidance in case 3"
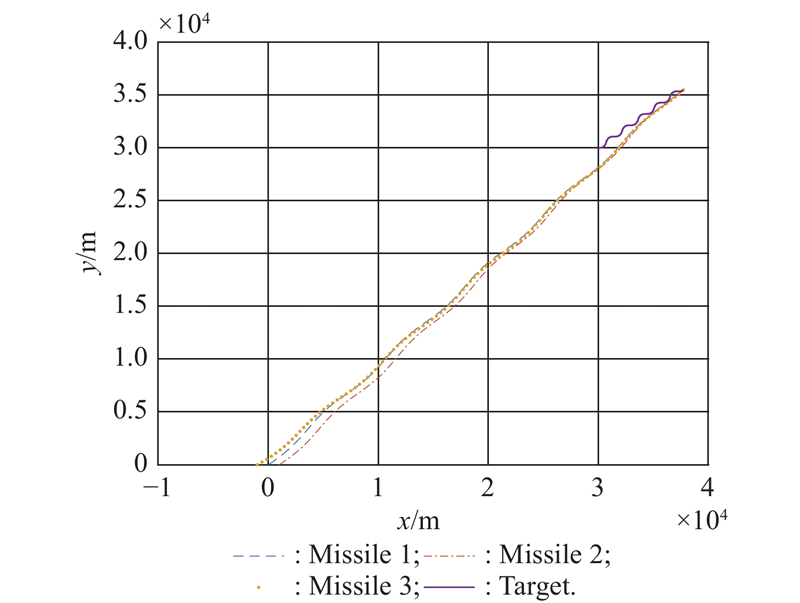
Fig 15
Relative distance between target and missile in case 3"
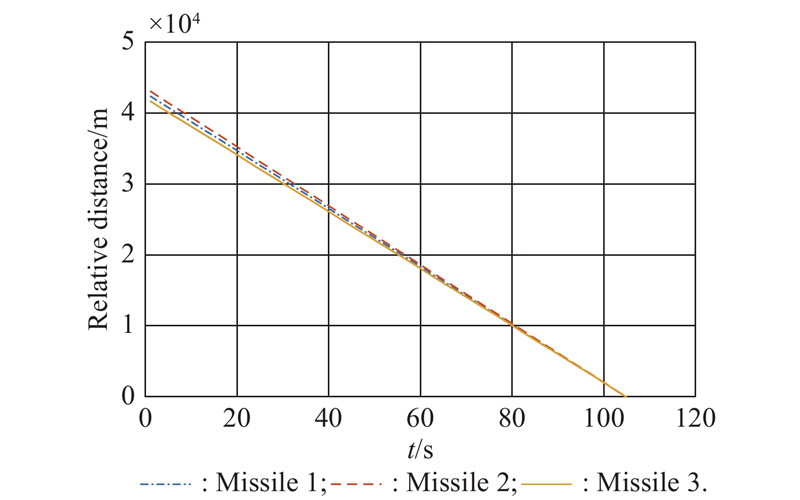
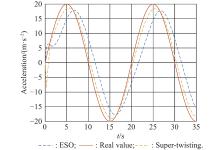
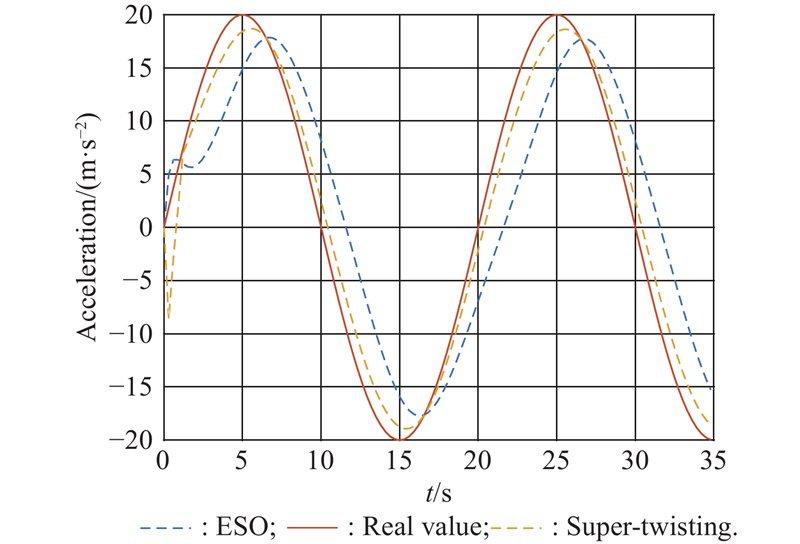
Fig 16
Comparison between ESO and super-twisting observer"
| 1 | XU J, HUANG F, WU D, et al. Deep reinforcement learning based multi-AUVs cooperative decision-making for attack-defense confrontation missions. Ocean Engineering, 2021, 239: 109794. |
| 2 | QIU X Q, GAO C S, JING W X. Maneuvering penetration strategies of ballistic missiles based on deep reinforcement learning. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2022, 236: 3494−3504. |
| 3 | SINHA A, KUMAR S R, MUKHERJEE D. Cooperative integrated guidance and control design for simultaneous interception. Aerospace Science and Technology, 2021, 120: 107262. |
| 4 | WANG W H, WANG X P, LIU B, et al. Research on optimal cooperative attack strategy of multiple UAVs. Journal of Physics: Conference Series, 2021, 1748(2): 022040. |
| 5 |
LI B, LIN D F, WANG H Finite time convergence cooperative guidance law based on graph theory. Optik- International Journal for Light and Electron Optics, 2016, 127 (21): 10180- 10188.
doi: 10.1016/j.ijleo.2016.08.035 |
| 6 | YU H, DAI K, LI H J, et al Distributed cooperative guidance law for multiple missiles with input delay and topology switching. Journal of the Franklin Institute, 2021, 358 (17): 9061- 9085. |
| 7 | WANG C Y, DONG W, WANG J N, et al Impact-angle-constrained cooperative guidance for salvo attack. Journal of Guidance, Control, and Dynamics, 2021, 45 (4): 1- 20. |
| 8 | FIROUZBAHRAMI M, NOBAKHTI A. Cooperative fixed-time/finite-time distributed robust optimization of multi-agent systems. Automatica, 2022, 142: 110358. |
| 9 |
JIANG H, AN Z, YU Y N, et al Cooperative guidance with multiple constraints using convex optimization. Aerospace Science and Technology, 2018, 79 (8): 426- 440.
doi: 10.1016/j.ast.2018.06.001 |
| 10 |
YU H, KEREN D, LI H J, et al Cooperative guidance law for multiple missiles simultaneous attacks with fixed-time convergence. International Journal of Control, 2023, 96 (9): 2167- 2180.
doi: 10.1080/00207179.2022.2086926 |
| 11 |
WANG Z K, FU W X, FANG Y W, et al Prescribed-time cooperative guidance law against maneuvering target based on leader-following strategy. ISA Transactions, 2022, 129, 257- 270.
doi: 10.1016/j.isatra.2022.02.043 |
| 12 | YU C G, ZHU B, ZUO Z Y. Three-dimensional optimal guidance with Lyapunov redesign for UAV interception. Guidance, Navigation and Control, 2021, 1(4): 2140004. |
| 13 | CHO D, KIM H J, TANK M J Fast adaptive guidance against highly maneuvering targets. IEEE Trans. on Aerospace and Electronic Systems, 2016, 52 (2): 671- 680. |
| 14 | WANG Z K, FU W X, FANG Y W, et al Cooperative guidance law against highly maneuvering target with dynamic surrounding attack. International Journal of Aerospace Engineering, 2021, 236 (5): 6623561. |
| 15 |
HE S M, LIN D F Guidance laws based on model predictive control and target manoeuvre estimator. Transactions of the Institute of Measurement and Control, 2016, 38 (12): 1509- 1519.
doi: 10.1177/0142331215597970 |
| 16 | ZHOU J L, LV Y Z, YANG J Y, et al. Cooperative guidance law design for simultaneous attack with multiple missiles under directed communication topologies. Proc. of the International Workshop on Complex Systems and Networks, 2017: 313−318, |
| 17 | CHWA D Robust nonlinear disturbance observer based adaptive guidance law against uncertainties in missile dynamics and target maneuver. IEEE Trans. on Aerospace and Electronic Systems, 2018, 54 (4): 1739- 1749. |
| 18 | ZHANG W J, DU X, XIA Q L. A three-dimensional cooperative guidance law based on consensus theory for maneuvering targets. Mathematical Problems in Engineering, 2019, 2019(1): 2120745. |
| 19 | WU G, ZHANG K A novel guidance law for intercepting a highly maneuvering target. International Journal of Aerospace Engineering, 2021, 2021 (1): 2326323. |
| 20 |
SATO M Observer-based robust controller design with simultaneous optimization of scaling matrices. IEEE Trans. on Automatic Control, 2020, 65 (2): 861- 866.
doi: 10.1109/TAC.2019.2919811 |
| 21 | GUO Z Y, GUO J G, WANG X M, et, al Sliding mode control for systems subjected to unmatched disturbances/unknown control direction and its application. International Journal of Robust and Nonlinear Control, 2021, 31 (4): 1303- 1323. |
| 22 | ROJAS H D, JOHN C R On the equivalence between generalized proportional integral observer and disturbance observer. ISA Transactions, 2022, 133, 397- 411. |
| 23 |
CHEN Z Q, HAN L, HOU Y Design of H_/H∞ fault detection observer for closed-loop nonlinear system with disturbance. Assembly Automation, 2020, 40, 589- 599.
doi: 10.1108/AA-09-2019-0160 |
| 24 |
ZHAO Q L, DONG X W, LIANG Z X, et al Distributed group cooperative guidance for multiple missiles with fixed and switching directed communication topologies. Nonlinear Dynamics, 2017, 90 (4): 2507- 2523.
doi: 10.1007/s11071-017-3816-3 |
| 25 |
LYU T, GUO Y N, LI C J, et al Multiple missiles cooperative guidance with simultaneous attack requirement under directed topologies. Aerospace Science and Technology, 2019, 89, 100- 110.
doi: 10.1016/j.ast.2019.03.037 |
| 26 |
LEE C H, KIM T H, TAHK M J Effects of time-to-go errors on performance of optimal guidance laws. IEEE Trans. on Aerospace and Electronic Systems, 2015, 51 (4): 3270- 3281.
doi: 10.1109/TAES.2015.150163 |
| 27 |
JEON I S, LEE J I, TAHK M Homing guidance law for cooperative attack of multiple missiles. Journal of Guidance, Control, and Dynamics, 2010, 275- 280.
doi: 10.2514/1.40136 |
| 28 | LI Q C, FAN Y H, YAN T, et al. Cooperative smooth nonsingular terminal sliding mode guidance with tracking differentiator for active aircraft defense. Aerospace, 2022, 9(4): 9040221. |
| 29 | ZHAO J, ZHOU R, DONG Z N. Three-dimensional cooperative guidance laws against stationary and maneuvering targets. Chinese Journal of Aeronautics, 2015, 28(4): 1104−1120. |
| 30 | MIRANDA C, R. Finite-time sliding mode controller for perturbed second-order systems. ISA Transactions, 2019, 95: 82−92. |
| 31 |
SEEBER R, HORN M, FRIDMAN L A novel method to estimate the reaching time of the super-twisting algorithm. IEEE Trans. on Automatic Control, 2018, 63 (12): 4301- 4308.
doi: 10.1109/TAC.2018.2812789 |
| 32 | MORENO J A, OSORIO M. Strict Lyapunov functions for the super-twisting algorithm. IEEE Trans. on Automatic Control, 2012, 57 (4): 1035- 1040. |
| 33 | ZHAO B, ZHU C X, TONG Y, et al Adaptive sliding mode observer based impact angle constraint guidance law. Air and Space Defense, 2019, 2 (4): 19- 24. |
| 34 | LI Z B, DONG Q L, ZHANG X Y, et al. Impact angle-constrained integrated guidance and control for supersonic skid-to-turn missiles using backstepping with global fast terminal sliding mode control. Aerospace Science and Technology, 2022, 122: 107386. |
| 35 |
SHAO X L, WANG H L Back-stepping active disturbance rejection control design for integrated missile guidance and control system via reduced-order ESO. ISA Transactions, 2015, 57, 10- 22.
doi: 10.1016/j.isatra.2015.02.013 |
| [1] | Dakai LIU, Sven ESCHE. Revised barrier function-based adaptive finite- and fixed-time convergence super-twisting control [J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 775-782. |
| [2] | Pu YANG, Xukai HU, Zixin WANG, Zhiqing ZHANG. Sliding mode fault tolerant consensus control for multi-agent systems based on super-twisting observer [J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1309-1319. |
| [3] | Wei LI, Qiuqiu WEN, Lei HE, Qunli XIA. Three-dimensional impact angle constrained distributed cooperative guidance law for anti-ship missiles [J]. Journal of Systems Engineering and Electronics, 2021, 32(2): 447-459. |
| [4] | Yue LI, Lei HE, Qunli XIA. Line-of-sight rates extraction of roll-pitch seeker under anti-infrared decoy state [J]. Journal of Systems Engineering and Electronics, 2021, 32(1): 178-196. |
| [5] | Biao YANG, Wuxing JING, Changsheng GAO. Three-dimensional cooperative guidance law for multiple missiles with impact angle constraint [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1286-1296. |
| [6] | Zhanshan Zhao, Hongru Gu, Jing Zhang, and Gang Ding. Terminal sliding mode control based on super-twisting algorithm [J]. Systems Engineering and Electronics, 2017, 28(1): 145-. |
| [7] | Xuejiao Sun, Rui Zhou, and Delong Hou. Output-feedback based partial integrated missile guidance and control law design [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1238-1248. |
| [8] | Yanbo Yuan and Ke Zhang. Design of a robust guidance law via active disturbance rejection control [J]. Journal of Systems Engineering and Electronics, 2015, 26(2): 353-358. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||