
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (1): 256-268.doi: 10.23919/JSEE.2025.000016
• CONTROL THEORY AND APPLICATION • Previous Articles
Xueqiang GU( ), Lina LU(), Fengtao XIANG(), Wanpeng ZHANG()
), Lina LU(), Fengtao XIANG(), Wanpeng ZHANG()
Received:2023-08-11
Online:2025-02-18
Published:2025-03-18
Contact:
Xueqiang GU
E-mail:xueqiang_gu@nudt.edu.cn;lulina16@nudt.edu.cn;xiangfengtao@nudt.edu.cn;wpzhang@nudt.edu.cn
About author:Xueqiang GU, Lina LU, Fengtao XIANG, Wanpeng ZHANG. Formation-containment control for nonholonomic multi-agent systems with a desired trajectory constraint[J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 256-268.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
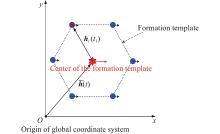
Fig 1
Hexagon formation template for L with M=6"
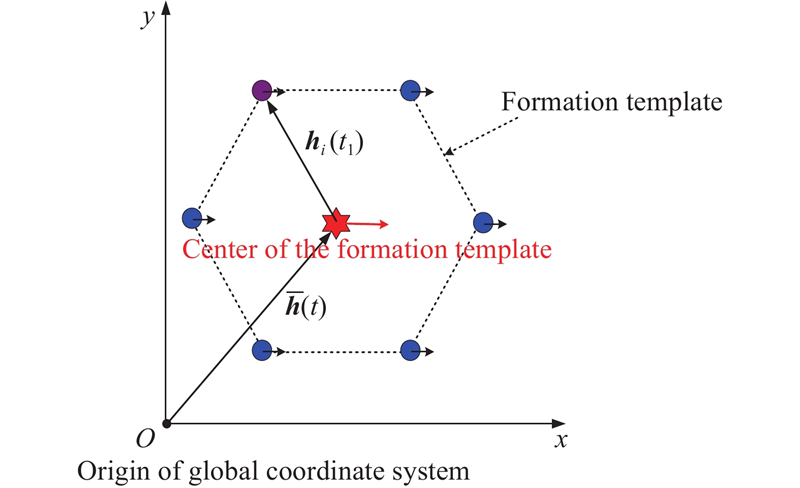

Fig 2
Example of FC control problem with desired trajectory"
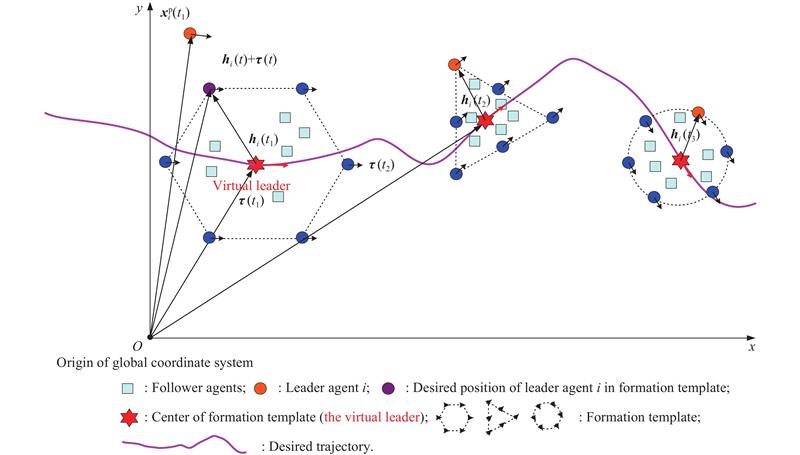
Table 1
Three experiments designed for nonholonomic multi-agent system"
| Experiment list | Follower | Leader | Desired trajectory | Desired formation |
| Experiment 1 | Straight line | Rectangular | ||
| Experiment 2 | Straight line | Circle | ||
| Experiment 3 | Quadratic curve | Irregular shape |

Fig 3
Initial distribution of all agents in Experiments 1?3"
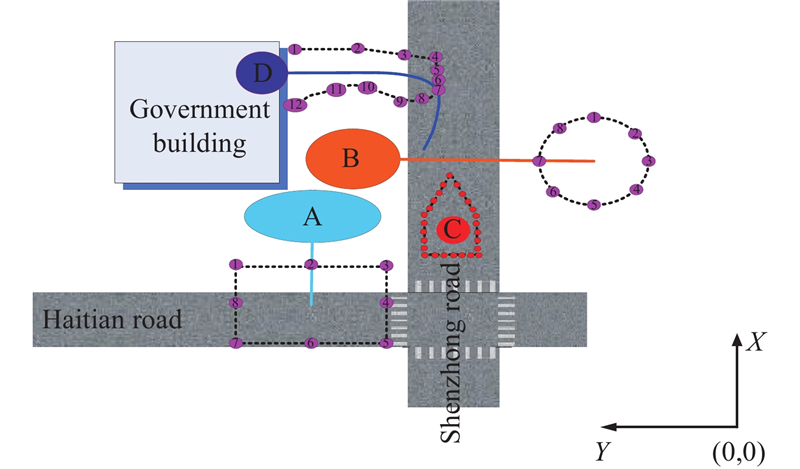

Fig 4
Directed interaction topology in Experiments 1?3"
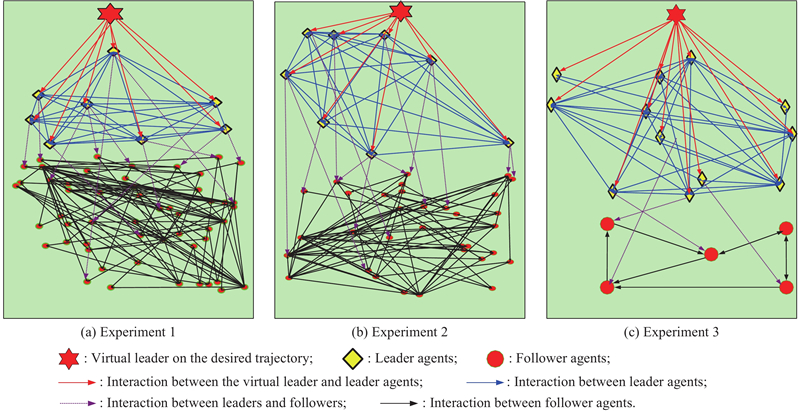
Fig 5
Motion states of the nonholonomic swarm system in Experiment 1 (t=0?31 s)"
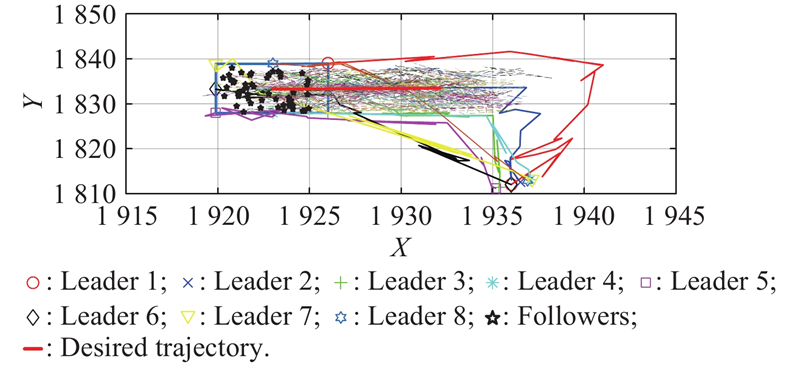
Fig 6
Motion states of the nonholonomic swarm system in Experiment 2 (t=0?44 s)"
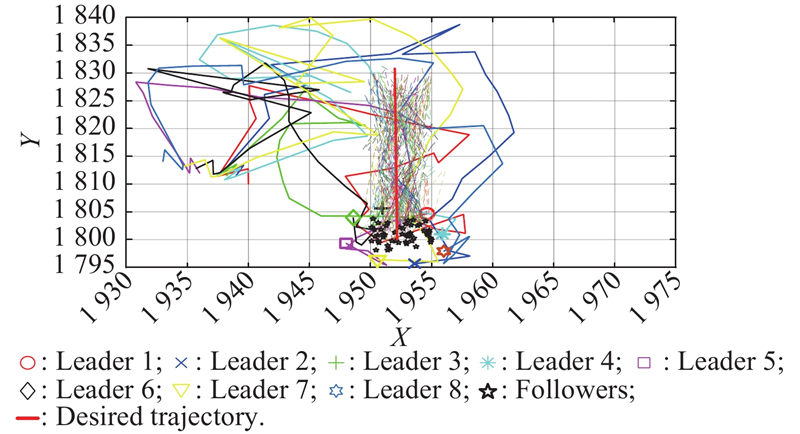
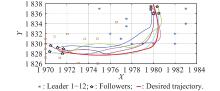
Fig 7
Motion states of the nonholonomic swarm system in Experiment 3 (t=0?32 s)"
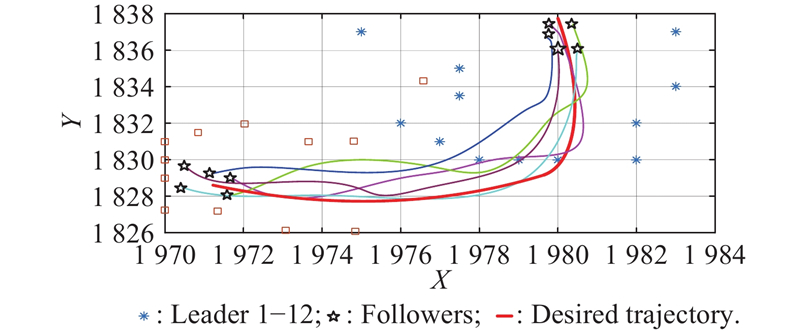
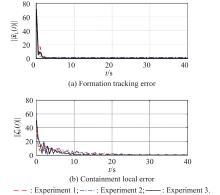
Fig 8
Formation tracking error and the containment local error"
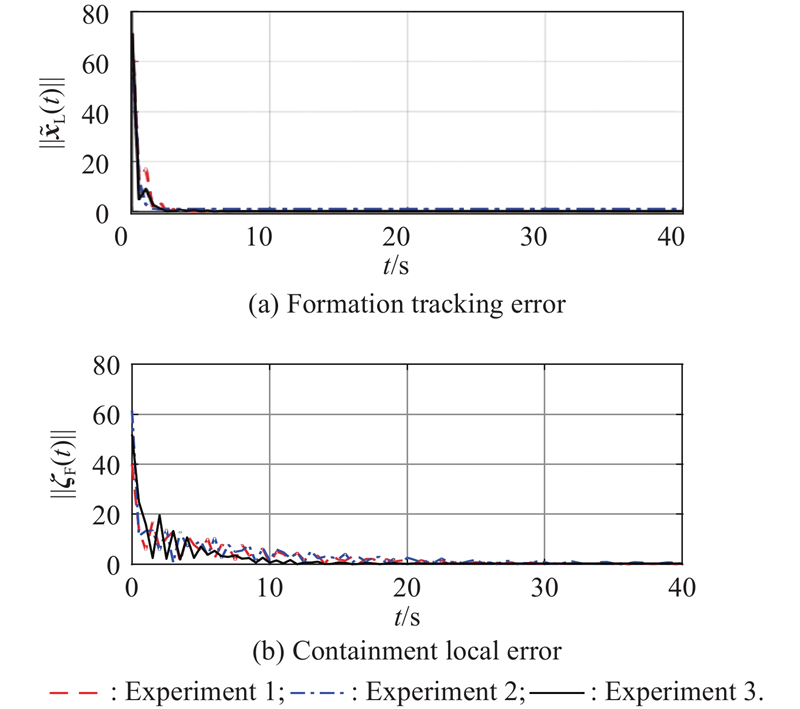

Fig 9
Errors between the center of all leaders and the global trajectory"
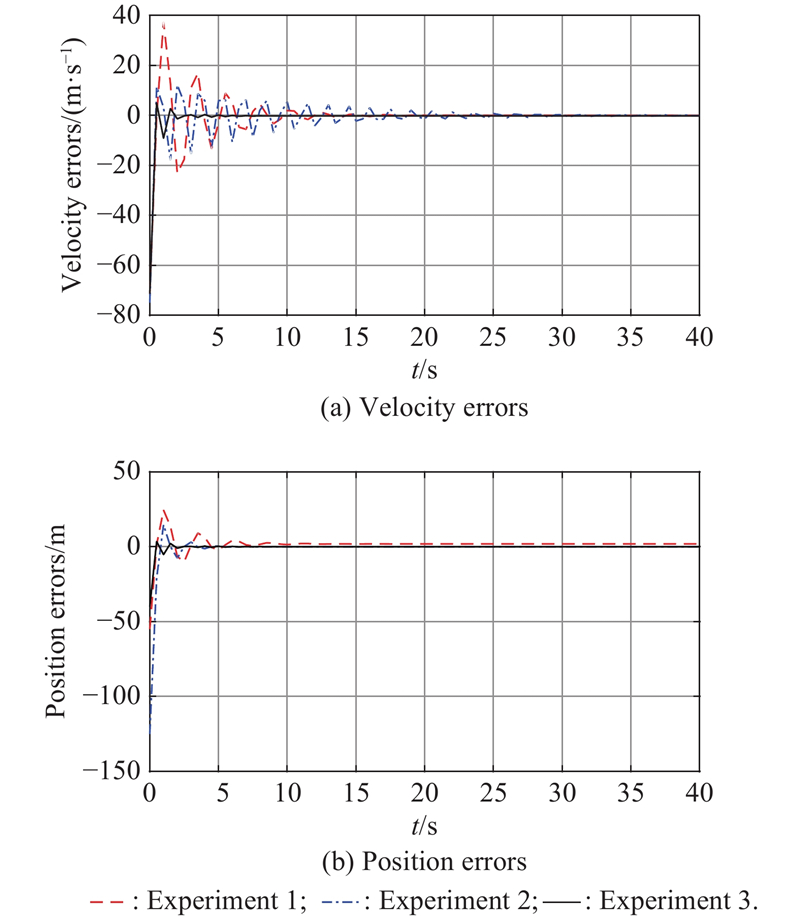

Fig 10
Visualization simulation results of Experiment 1"
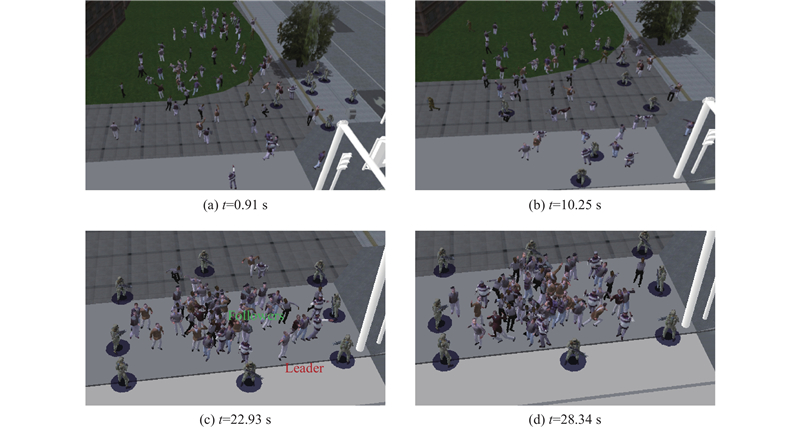

Fig 11
Visualization simulation results of Experiment 2"
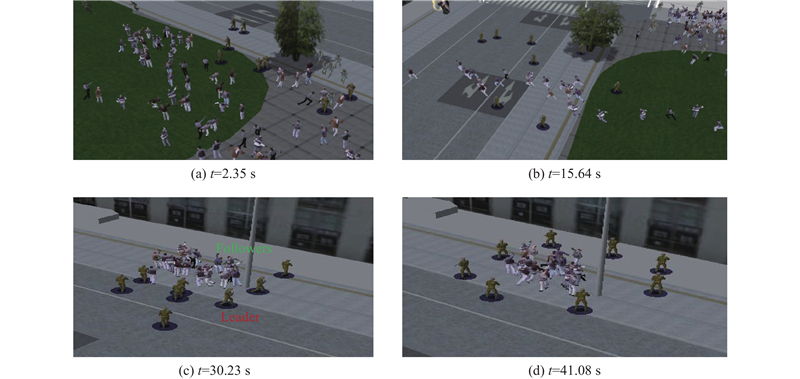

Fig 12
Visualization simulation results of Experiment 3"

| 1 |
ZHU B, XIE L H, HAN D, et al A survey on recent progress in control of swarm systems. Science China Information Sciences, 2017, 60 (7): 070201.
doi: 10.1007/s11432-016-9088-2 |
| 2 |
LYU M, SCHUTTER D B, BALDI S Nonrecursive control for formation-containment of HFV swarms with dynamic event-triggered communication. IEEE Trans. on Industrial Informatics, 2023, 19 (3): 3188- 3197.
doi: 10.1109/TII.2022.3163573 |
| 3 | SU Y H, LANZON A. Formation-containment tracking and scaling for multiple quadcopters with an application to choke-point navigation. Proc. of the International Conference on Robotics and Automation, 2022: 4908−4914. |
| 4 |
OUYANG Y C, XUE L, DONG L, et al Neural network-based finite-time distributed formation-containment control of two-layer quadrotor UAVs. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2022, 52 (8): 4836- 4848.
doi: 10.1109/TSMC.2021.3103013 |
| 5 | CHEN L M, LI C J, GUO Y N, et al Formation-containment control of multi-agent systems with communication delays. ISA Transactions, 2022, 128, 32- 43. |
| 6 |
GONG X, LI X X Fault-tolerant practical prescribed-time formation-containment control of multi-agent systems on directed graphs. IEEE Trans. on Network Science and Engineering, 2024, 11 (1): 352- 365.
doi: 10.1109/TNSE.2023.3298719 |
| 7 |
MA L, ZHU F L, ZHAO X D Human-in-the-loop formation-containment control for multiagent systems: an observer-based distributed unknown input reconstruction method. IEEE Trans. on Control of Network Systems, 2023, 10 (4): 2178- 2189.
doi: 10.1109/TCNS.2023.3269010 |
| 8 |
ZOU Y, WEN C Y, GUAN M Y Adaptive estimator-based formation maneuvering control of nonholonomic mobile robots. International Journal of Adaptive Control and Signal Processing, 2020, 34 (2): 199- 209.
doi: 10.1002/acs.3078 |
| 9 | DAI S L, HE S D, CHEN X, et al Adaptive leader-follower formation control of nonholonomic mobile robots with prescribed transient and steady-state performance. IEEE Trans. on Industrial Informatics, 2019, 16 (6): 3662- 3671. |
| 10 |
CHU X, PENG Z X, WEN G G, et al Distributed fixed-time formation tracking control of multi-robot systems with nonholonomic constraints. Neurocomputing, 2018, 313, 167- 174.
doi: 10.1016/j.neucom.2018.06.044 |
| 11 | CHU X, PENG Z X, WEN G G, et al. Distributed formation tracking of multi-robot systems with nonholonomic constraint via event-triggered approach. Neurocomputing, 2018, 275: 121−131. |
| 12 |
CEPEDA-GOMEZ R, PERICO L F Formation control of nonholonomic vehicles under time delayed communications. IEEE Trans. on Automation Science and Engineering, 2015, 12 (3): 819- 826.
doi: 10.1109/TASE.2015.2424252 |
| 13 | DIMAROGONAS D V, EGERSTEDT M, KYRIAKOPOULOS K J. A leader-based containment control strategy for multiple unicycles. Proc. of the 45th IEEE Conference on Decision and Control, 2006: 5968−5973. |
| 14 | PENG X H, GUO K X, GENG Z Y Moving target circular formation control of multiple non-holonomic vehicles without global position measurements. IEEE Trans. on Circuits and Systems II: Express Briefs, 2019, 67 (2): 310- 314. |
| 15 | DONG X W, HUA Y Z, ZHOU Y, et al Theory and experiment on formation-containment control of multiple multirotor unmanned aerial vehicle systems. IEEE Trans. on Automation Science and Engineering, 2018, 16 (1): 229- 240. |
| 16 | HUA Y Z, DONG X W, HAN L, et al Formation-containment tracking for general linear multi-agent systems with a tracking-leader of unknown control input. Systems & Control Letters, 2018, 122, 67- 76. |
| 17 |
CHEN L M, LI C J, XIAO B, et al Formation-containment control of networked Euler Lagrange systems: an event-triggered framework. ISA Transactions, 2019, 86, 87- 97.
doi: 10.1016/j.isatra.2018.10.019 |
| 18 |
ZHOU P P, CHEN B M Formation-containment control of Euler-Lagrange systems of leaders with bounded unknown inputs. IEEE Trans. on Cybernetics, 2022, 52 (7): 6342- 6353.
doi: 10.1109/TCYB.2020.3034931 |
| 19 |
YAO X Y, DING H F, GE M Y Formation-containment control for multi-robot systems with two-layer leaders via hierarchical controller-estimator algorithms. Journal of the Franklin Institute, 2018, 355 (12): 5272- 5290.
doi: 10.1016/j.jfranklin.2018.05.010 |
| 20 |
ZHOU Y, LI P, CAI T Y, et al Cooperative containment formation for discrete-time heterogeneous networks by double compensators. International Journal of Control, Automation and Systems, 2020, 18 (2): 313- 321.
doi: 10.1007/s12555-019-0181-7 |
| 21 |
LI D Y, GE S S, MA G F, et al Layered formation-containment control of multi-agent systems in constrained space. International Journal of Control, Automation and Systems, 2020, 18 (3): 768- 779.
doi: 10.1007/s12555-019-0172-8 |
| 22 |
HAN L, DONG X W, LI Q D, et al Formation-containment control for second-order multi-agent systems with time-varying delays. Neurocomputing, 2016, 218, 439- 447.
doi: 10.1016/j.neucom.2016.09.001 |
| 23 | XIA M D, LIU C L, LIU F Formation-containment control of second-order multiagent systems via intermittent communication. Complexity, 2018, 2018, 2501427. |
| 24 | DONG X. Formation and containment control for high-order linear swarm systems. Berlin: Springer Berlin Heidelberg, 2015. |
| 25 |
ZHANG J, ZHANG H G, MING Z Y, et al Adaptive event-triggered time-varying output bipartite formation containment of multiagent systems under directed graphs. IEEE Trans. on Neural Networks and Learning Systems, 2023, 34 (11): 8909- 8922.
doi: 10.1109/TNNLS.2022.3154028 |
| 26 |
CAI Y L, ZHANG H G, WANG Y C, et al Fixed-time time-varying formation tracking for nonlinear multi-agent systems under event-triggered mechanism. Information Sciences, 2021, 564, 45- 70.
doi: 10.1016/j.ins.2021.02.071 |
| 27 | ZHANG X Y, WU J, ZHAN X S, et al Observer-based adaptive time-varying formation-containment tracking for multiagent system with bounded unknown input. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2022, 53 (3): 1479- 1491. |
| 28 |
SUN Q, WANG X, CHEN Y H Satellite formation-containment control emphasis on collision avoidance and uncertainty suppression. IEEE Trans. on Cybernetics, 2023, 53 (8): 5121- 5134.
doi: 10.1109/TCYB.2022.3173683 |
| 29 |
JIANG W, RAHMANI A, WEN G G Fully distributed time-varying formation-containment control for large-scale nonholonomic vehicles with an unknown real leader. International Journal of Control, 2021, 94, 1020- 1041.
doi: 10.1080/00207179.2019.1626996 |
| 30 | XU T, DUAN Z S, SUN Z Y, et al. Adaptive distributed formation-containment control on switching directed networks: a dynamic triggering framework. IEEE Trans. on Control of Network Systems, 2024, 11(2): 951−963. |
| 31 | CAI Y L, ZHANG H G, WANG Y C, et al Adaptive bipartite fixed-time time-varying output formation-containment tracking of heterogeneous linear multiagent systems. IEEE Trans. on Neural Networks and Learning Systems, 2021, 33 (9): 4688- 4698. |
| 32 |
LU Y Z, DONG X W, LI Q D, et al Time-varying group formation-containment tracking control for general linear multiagent systems with unknown inputs. IEEE Trans. on Cybernetics, 2022, 52 (10): 11055- 11067.
doi: 10.1109/TCYB.2021.3058086 |
| 33 |
DING T F, GE M F, LIU Z W, et al Cluster time-varying formation-containment tracking of networked robotic systems via hierarchical prescribed-time ESO-based control. IEEE Trans. on Network Science and Engineering, 2024, 11 (1): 566- 577.
doi: 10.1109/TNSE.2023.3302011 |
| 34 | CHI M, WANG X L, DOU Y M, et al Intermittent sampled data control for time-varying formation-containment of the multiagent system with/without time delay. Complexity, 2021, 2021, 9971855. |
| 35 |
CHEN L, DUAN H B Collision-free formation-containment control for a group of UAVs with unknown disturbances. Aerospace Science and Technology, 2022, 126, 107618.
doi: 10.1016/j.ast.2022.107618 |
| 36 | CHEN W, WANG Z D, DING D R, et al Distributed formation-containment control for discrete-time multiagent systems under dynamic event-triggered transmission scheme. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2022, 53 (2): 1308- 1319. |
| 37 |
ZHANG J X, SU H S Formation-containment control for multi-agent systems with sampled data and time delays. Neurocomputing, 2021, 424, 125- 131.
doi: 10.1016/j.neucom.2019.11.030 |
| 38 |
BI C, XU X, LIU L, et al Output containment control of heterogeneous linear multiagent systems with unbounded distributed transmission delays. IEEE Trans. on Cybernetics, 2022, 52 (8): 8157- 8166.
doi: 10.1109/TCYB.2021.3050177 |
| 39 |
BI C, XU X, LIU L, et al Formation-containment tracking for heterogeneous linear multiagent systems under unbounded distributed transmission delays. IEEE Trans. on Control of Network Systems, 2023, 10 (2): 822- 833.
doi: 10.1109/TCNS.2022.3210746 |
| 40 |
BI C, XU X, LIU L, et al Robust cooperative output regulation of heterogeneous uncertain linear multiagent systems with unbounded distributed transmission delays. IEEE Trans. on Automatic Control, 2022, 67 (3): 1371- 1383.
doi: 10.1109/TAC.2021.3069718 |
| 41 | DE T G, LIU D G, PETRILLO A, et al A L2-gain robust PID-like protocol for time-varying output formation-containment of multi-agent systems with external disturbance and communication delays. IET Control Theory & Applications, 2021, 15 (9): 1169- 1184. |
| 42 | ZHOU S Y, DONG X W, HUA Y Z, et al Predefined formation-containment control of high-order multi-agent systems under communication delays and switching topologies. IET Control Theory & Applications, 2021, 15 (12): 1661- 1672. |
| 43 | DI-Guy - EDS Technologies Pvt. Ltd. https://edstechnologies.com/solutions/visual-simulation/di-guy/. |
| [1] | Yanchao Sun, Wenjia Wang, Guangfu Ma, Zhuo Li, and Chuanjiang Li. Backstepping-based distributed coordinated tracking for multiple uncertain Euler-Lagrange systems [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1083-1095. |
| [2] | Xiaoyuan Luo, Nani Han, and Xinping Guan. Leader-following consensus protocols for formation control of multi-agent network [J]. Journal of Systems Engineering and Electronics, 2011, 22(6): 991-997. |
| [3] | Yingying She and Huajing Fang. Fast consensus seeking for multi-agent systems [J]. Journal of Systems Engineering and Electronics, 2011, 22(3): 534-539. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||