
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (1): 194-208.doi: 10.23919/JSEE.2025.000020
• SYSTEMS ENGINEERING • Previous Articles
Jingfeng GUO( ), Rui SONG(), Shiwei HE()
), Rui SONG(), Shiwei HE()
Received:2024-03-01
Online:2025-02-18
Published:2025-03-18
Contact:
Rui SONG
E-mail:616988704@qq.com;rsong@bjtu.edu.cn;shwhe@bjtu.edu.cn
About author:Supported by:Jingfeng GUO, Rui SONG, Shiwei HE. Vehicle and onboard UAV collaborative delivery route planning: considering energy function with wind and payload[J]. Journal of Systems Engineering and Electronics, 2025, 36(1): 194-208.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
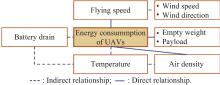
Fig 1
Factors related to UAV energy consumption"
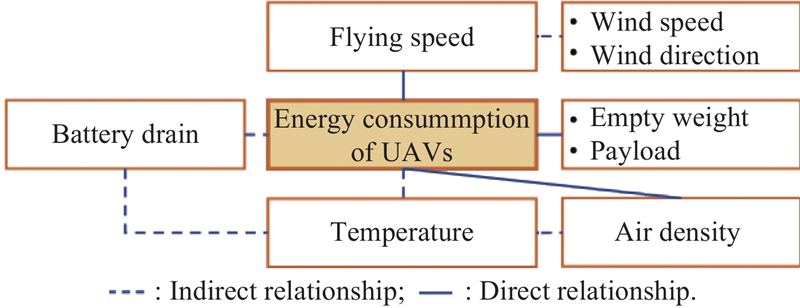
Table 1
Comparison of relevant literature"
| Reference | Model | Methodology | |||||
| V | U | Obj | TW | Collaboration | UAV endurance | ||
| Murray et al. [ | 1 | 1 | CT | × | Soft | Time | Re-assign heuristic |
| Ha et al. [ | 1 | 1 | DCDW | × | Soft | Time | GRASP |
| Tu et al. [ | 1 | N | DCD | × | Soft | Distance | GRASP+ALNS (SA) |
| Murray et al. [ | 1 | N | CT | × | Soft | Time | Three-phrase heuristic |
| Peng et al. [ | 1 | 1 | CT | × | Soft | ETP | HNS |
| Lan et al. [ | 1 | 1 | CT | √ | Soft | Time | LP-based metaheuristics |
| Schermer et al. [ | M | N | Makespan | × | Soft | Distance | Matheuristic method |
| Sacramento et al. [ | M | 1 | DCD | × | Soft | Time | ALNS (SA) |
| Kuo et al. [ | M | 1 | DCD | √ | Soft | Time | VNS |
| Jeong et al. [ | 1 | 1 | CT | × | Soft | EP | TPCSA |
| Cheng et al. [ | 0 | N | DCE | √ | × | EP | Branch-and-cut |
| Meng et al. [ | M | 1 | DCD | × | Hard | EP | ISA |
| This paper | 1 | 1 | DCE | √ | Hard | EPW | ALNS (TA) |

Fig 2
Example of a TSP-TWOUAV solution"
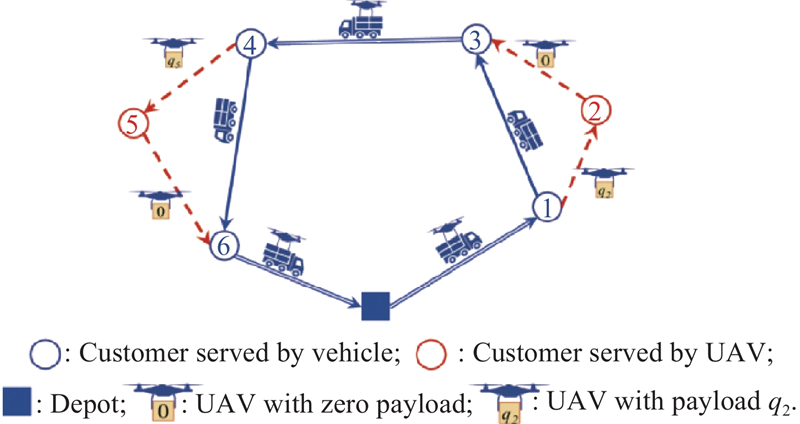

Fig 3
Payload and wind condition in UAV delivery"
Table 2
Summary of notations for the MILP model"
| Symbol | Description |
| Set of all nodes | |
| Set of customer nodes | |
| Set of departing nodes | |
| Set of arriving nodes | |
| Set of directed links for vehicle | |
| Set of UAV feasible sorties | |
| Time spent on UAV launch | |
| Time spent on UAV recovery | |
| Service time spent by UAV | |
| Service time spent by vehicle | |
| Travel time of UAV from node i to j | |
| Travel time of vehicle from node i to j | |
| Cost coefficient of UAV sortie | |
| Cost coefficient of vehicle travel distance | |
| UAV’s maximum battery volume | |
| Energy consumption of UAV sortie | |
| Travel distance of vehicle from node i to j | |
| Opening time for serving customer i | |
| Closing time for serving customer i | |
| A sufficiently large number, | |
| Binary decision variable indicating whether vehicle travels from node i to j | |
| Binary decision variable indicating whether the sortie | |
| Continuous variable indicating the vehicle’s departure time from node i | |
| Continuous variable indicating the UAV’s departure time from node i | |
| Non-negative integer variable indicating the position of the visit i in the vehicle’s route | |
| Binary decision variable indicating whether node i is visited before node j in the vehicle’s route |

Fig 4
Solution representation"


Fig 5
Generate initial solution"
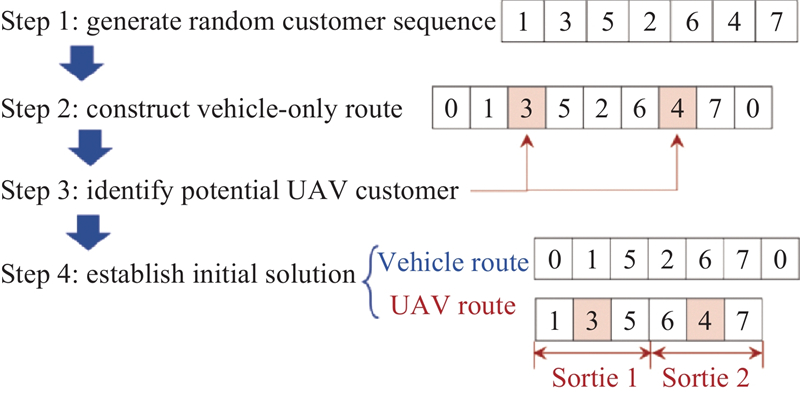
Table 3
Score of the corresponding operator"
| Score | Description |
| The new solution is accepted as global best solution | |
| The new solution results in a solution which is accepted with a cost better than the cost of the current solution | |
| The new solution results in a solution which is accepted with a cost worse than the cost of the current solution | |
| The new solution is rejected |
Table 4
Technical parameters of vehicle and UAV"
| Parameter | Value |
| Cost coefficient of UAV | 1.68×10−7 |
| Cost coefficient of vehicle | |
| Maximum payload of UAV/kg | 30 |
| Battery volume/J | |
| Airspeed/(m/s) | 20 |
| UAV empty weight/kg | 25 |
| Drag coefficient | 0.54 |
| Front surface of UAV/m2 | 1.8 |
| UAV width/m | 1.88 |
| Air density | 1.225 |
Table 5
Comparison results between Gurobi and ALNS algorithm performance under Scenario 1"
| No. | Size | Dims/km2 | Gurobi | ALNS | |||||
| GAP/% | |||||||||
| 1 | 6 | 8×8 | 23.096 | 1.709 | 23.096 | 24.232 | 4.920 | 0.242 | |
| 2 | 6 | 5×5 | 10.589 | 1.879 | 9.803 | 10.961 | 3.514 | 0.206 | |
| 3 | 8 | 8×8 | 25.434 | 17.311 | 25.735 | 28.497 | 12.045 | 0.518 | |
| 4 | 8 | 5×5 | 16.098 | 26.977 | 14.723 | 15.019 | −6.703 | 0.541 | |
| 5 | 10 | 8×8 | 28.398 | 68.757 | 28.684 | 29.812 | 4.980 | 0.960 | |
| 6 | 10 | 5×5 | 11.665 | 64.095 | 10.909 | 11.470 | −1.675 | 0.786 | |
Table 6
Comparison results between Gurobi and ALNS algorithm performance under Scenario2"
| No. | Size | Dims/km2 | Gurobi | ALNS | |||||
| GAP/% | |||||||||
| 1 | 6 | 8×8 | 21.193 | 1.809 | 20.767 | 22.100 | 4.277 | 0.201 | |
| 2 | 6 | 5×5 | 10.115 | 1.949 | 9.170 | 10.718 | 5.961 | 0.180 | |
| 3 | 8 | 8×8 | 25.648 | 12.502 | 25.414 | 26.482 | 3.250 | 0.626 | |
| 4 | 8 | 5×5 | 12.719 | 13.191 | 10.171 | 12.058 | −5.197 | 0.624 | |
| 5 | 10 | 8×8 | 26.916 | 42.799 | 26.703 | 29.667 | 10.219 | 0.893 | |
| 6 | 10 | 5×5 | 11.332 | 59.916 | 9.992 | 10.753 | −5.108 | 0.831 | |
Fig 6
Vehicle and UAV routes for eight customers (8 km×8 km) under two wind conditions"
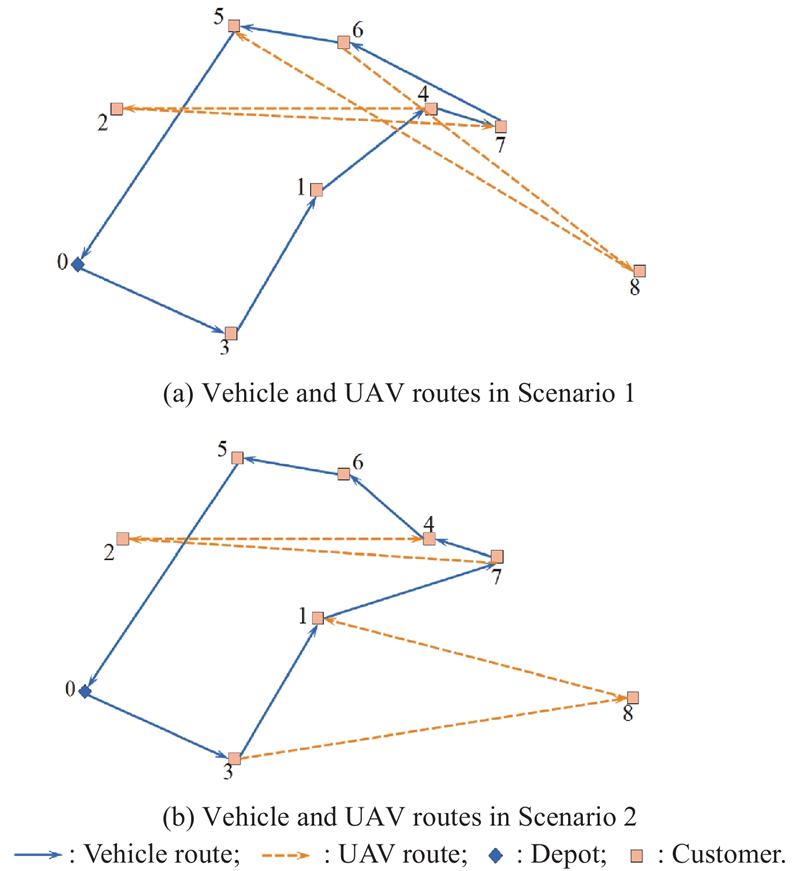
Table 7
Comparison results between ALNS algorithm and GA algorithm on larger-size experiment"
| No. | Size | Dim/km2 | ALNS | GA | |||||||
| Avg. time/s | GAP/% | ||||||||||
| 1 | 20 | 8×8 | 25.297 | 93.587 | 77.900 | 0.728 | 0.674 | 9.563 | 42.870 | −40.992 | |
| 2 | 20 | 5×5 | 19.199 | 57.266 | 52.790 | 0.664 | 0.634 | 8.680 | 35.042 | −45.212 | |
| 3 | 30 | 8×8 | 25.380 | 122.982 | 92.006 | 0.793 | 0.723 | 45.815 | 54.362 | −53.313 | |
| 4 | 30 | 5×5 | 18.098 | 74.970 | 59.389 | 0.758 | 0.689 | 48.035 | 22.025 | −17.828 | |
| 5 | 50 | 8×8 | 47.132 | 239.305 | 187.480 | 0.802 | 0.745 | 672.018 | 94.623 | −50.189 | |
| 6 | 50 | 5×5 | 29.006 | 128.419 | 112.544 | 0.774 | 0.741 | 488.961 | 54.298 | −46.580 | |
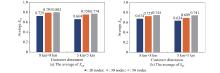
Fig 7
The average of Stsp and Sini under different customer density"

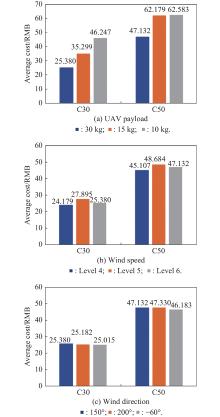
Fig 8
Average cost of sensitivity parameters"
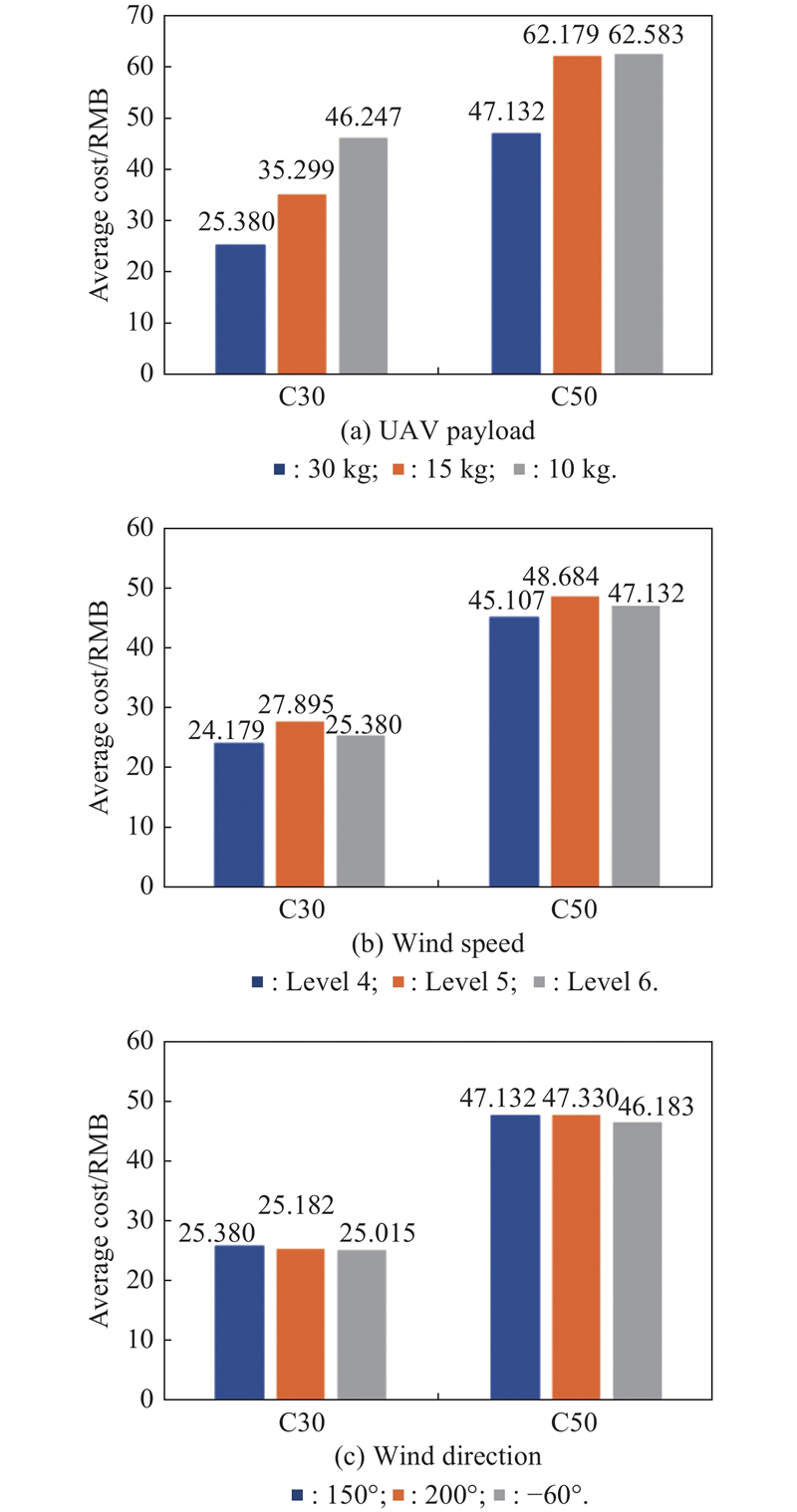
Table 8
Parameters for three wind scenarios"
| Condition | I | II | III |
| Type | Soft | Fresh | Strong |
| Wind level | Level 4 | Level 5 | Level 6 |
| Speed range/(m/s) | 5.5−7.9 | 8.0−10.7 | 10.8−13.8 |
| Wind speed/(m/s) | 6 | 10 | 12 |
| Wind direction/(°) | 150 | 150 | 150 |
| 1 |
AGATZ N, BOUMAN P, SCHMIDT M Optimization approaches for the traveling salesman problem with drone. Transportation Science, 2018, 52 (4): 965- 981.
doi: 10.1287/trsc.2017.0791 |
| 2 |
SACRAMENTO D, PISINGER D, ROPKE S An adaptive large neighborhood search metaheuristic for the vehicle routing problem with drones. Transportation Research Part C: Emerging Technologies, 2019, 102, 289- 315.
doi: 10.1016/j.trc.2019.02.018 |
| 3 | DING Y D, WAN J Q, LIN W, et al Coordinated last-mile deliveries with trucks and drones: a comparative study of operational modes. Journal of the Air Transport Research Society, 2024, 3, 100025. |
| 4 |
CHANG C W, LO L Y, CHEUNG H C, et al Proactive guidance for accurate UAV landing on a dynamic platform: a visual-inertial approach. Sensors, 2022, 22 (1): 404.
doi: 10.3390/s22010404 |
| 5 |
MURRAY C C, CHU A G The flying sidekick traveling salesman problem: optimization of drone-assisted parcel delivery. Transportation Research Part C: Emerging Technologies, 2015, 54, 86- 109.
doi: 10.1016/j.trc.2015.03.005 |
| 6 |
HA Q M, DEVILLE Y, PHAM Q D, et al On the min-cost traveling salesman problem with drone. Transportation Research Part C: Emerging Technologies, 2018, 86, 597- 621.
doi: 10.1016/j.trc.2017.11.015 |
| 7 | TU P A, DAT N T, DUNG P Q. Traveling salesman problem with multiple drones. Proc. of the 9th International Symposium on Information and Communication Technology, 2018: 46−53. |
| 8 |
WANG X Y, POIKONEN S, GOLDEN B The vehicle routing problem with drones: several worst-case results. Optimization Letters, 2017, 11, 679- 697.
doi: 10.1007/s11590-016-1035-3 |
| 9 |
SCHERMER D, MOEINI M, WENDT O A matheuristic for the vehicle routing problem with drones and its variants. Transportation Research Part C: Emerging Technologies, 2019, 106, 166- 204.
doi: 10.1016/j.trc.2019.06.016 |
| 10 | LAN B. Traveling salesman problem with time windows and drones (TSPTWD). Ames: Iowa State University, 2020. |
| 11 |
PUGLIESE L D P, GUERRIERO F, MACRINA G Using drones for parcels delivery process. Procedia Manufacturing, 2020, 42, 488- 497.
doi: 10.1016/j.promfg.2020.02.043 |
| 12 |
KUO R J, LU S H, LAI P Y, et al Vehicle routing problem with drones considering time windows. Expert Systems with Applications, 2022, 191, 116264.
doi: 10.1016/j.eswa.2021.116264 |
| 13 |
JEONG H Y, SONG B D, LEE S Truck-drone hybrid delivery routing: payload-energy dependency and no-fly zones. International Journal of Production Economics, 2019, 214, 220- 233.
doi: 10.1016/j.ijpe.2019.01.010 |
| 14 |
ROPKE S, PISINGER D An adaptive large neighborhood search heuristic for the pickup and delivery problem with time windows. Transportation Science, 2006, 40 (4): 455- 472.
doi: 10.1287/trsc.1050.0135 |
| 15 | MULUMBA T, NAJY W, DIABAT A The drone-assisted pickup and delivery problem: an adaptive large neighborhood search metaheuristic. Computers & Operations Research, 2024, 161, 106435. |
| 16 |
BERGHAUS M, LAMBERTY S, EHLERS J, et al Vehicle trajectory dataset from drone videos including off-ramp and congested traffic–analysis of data quality, traffic flow, and accident risk. Communications in Transportation Research, 2024, 4, 100133.
doi: 10.1016/j.commtr.2024.100133 |
| 17 |
HU D, LI S, DU J, et al Automating building damage reconnaissance to optimize drone mission planning for disaster response. Journal of Computing in Civil Engineering, 2023, 37 (3): 04023006.
doi: 10.1061/(ASCE)CP.1943-5487.0001061 |
| 18 |
YIN Y Q, LI D W, WANG D J, et al A branch-and-price-and-cut algorithm for the truck-based drone delivery routing problem with time windows. European Journal of Operational Research, 2023, 309 (3): 1125- 1144.
doi: 10.1016/j.ejor.2023.02.030 |
| 19 |
MURRAY C C, RAJ R The multiple flying sidekicks traveling salesman problem: parcel delivery with multiple drones. Transportation Research Part C: Emerging Technologies, 2020, 110, 368- 398.
doi: 10.1016/j.trc.2019.11.003 |
| 20 | PENG Y, LI Y J Optimization of truck-drone collaborative distribution route considering the impact of epidemic situation. China Journal of Highway and Transport, 2020, 33 (11): 73- 82. |
| 21 | SCHERMER D, MOEINI M, WENDT O A hybrid VNS/Tabu search algorithm for solving the vehicle routing problem with drones and en route operations. Computers & Operations Research, 2019, 109, 134- 158. |
| 22 | THIBBOTUWAWA A, NIELSEN P, ZBIGNIEW B, et al. Energy consumption in unmanned aerial vehicles: a review of energy consumption models and their relation to the UAV routing. Proc. of the 39th International Conference on Information Systems Architecture and Technology, 2019: 173−184. |
| 23 |
CHENG C, ADULYASAK Y, ROUSSEAU L M Drone routing with energy function: formulation and exact algorithm. Transportation Research Part B: Methodological, 2020, 139, 364- 387.
doi: 10.1016/j.trb.2020.06.011 |
| 24 | MENG S S, GUO X P Logistics optimization in truck-drone joint pick-up and delivery. Journal of Systems & Management, 2022, 31 (3): 555- 566. |
| 25 |
THIBBOTUWAWA A, BOCEWICZ G, RADZKI G, et al UAV mission planning resistant to weather uncertainty. Sensors, 2020, 20 (2): 515.
doi: 10.3390/s20020515 |
| 26 | GENDREAU M, POTVIN J Y. Handbook of metaheuristics. New York: Springer, 2019. |
| 27 |
MA W J, ZENG L, AN K Dynamic vehicle routing problem for flexible buses considering stochastic requests. Transportation Research Part C: Emerging Technologies, 2023, 148, 104030.
doi: 10.1016/j.trc.2023.104030 |
| 28 | YU X P, HU Y S, WU P The consistent vehicle routing problem considering driver equity and flexible route consistency. Computers & Industrial Engineering, 2024, 187, 109803. |
| 29 | JARUMANEEROJ P, SAKULSOM N An adaptive large neighborhood search for the multiple-day music rehearsal problems. Computers & Industrial Engineering, 2021, 157, 107279. |
| 30 | CHINA METEOROLOGICAL ADMINISTRATION. Specifications for surface meteorological observation-wind direction and wind speed. https://www.cma.gov.cn/zfxxgk/gknr/flfgbz/bz/202209/t20220921_5099085.html. |
| [1] | Jiaming ZHANG, Zhong LIU, Jianmai SHI, Chao CHEN. Weapon configuration, allocation and route planning with time windows for multiple unmanned combat air vehicles [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 953-968. |
| [2] | Hao Chen, Jun Li, Ning Jing, and Jun Li. User-oriented data acquisition chain task planning algorithm for operationally responsive space satellite [J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 1028-1039. |
| [3] | Guanghui Wang, Xuefeng Sun, Liping Zhang, and Chao Lv. Saturation attack based route planning and threat avoidance algorithm for cruise missiles [J]. Journal of Systems Engineering and Electronics, 2011, 22(6): 948-953. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||