
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (4): 1057-1067.doi: 10.23919/JSEE.2025.000099
• CONTROL THEORY AND APPLICATION • Previous Articles
Delong WU( ), Hao FANG(), Yiren HAO(), Aobo WANG()
), Hao FANG(), Yiren HAO(), Aobo WANG()
Received:2024-04-01
Online:2025-08-18
Published:2025-09-04
Contact:
Hao FANG
E-mail:hydrogen2000@163.com;fangh@bit.edu.cn;haoyiren2021@163.com;wabisme@163.com
About author:Supported by:Delong WU, Hao FANG, Yiren HAO, Aobo WANG. Outdoor navigation of millimeter-wave radar quadrotors based on optimal virtual tube[J]. Journal of Systems Engineering and Electronics, 2025, 36(4): 1057-1067.

Fig 1
Hardware structure of the quadrotor"
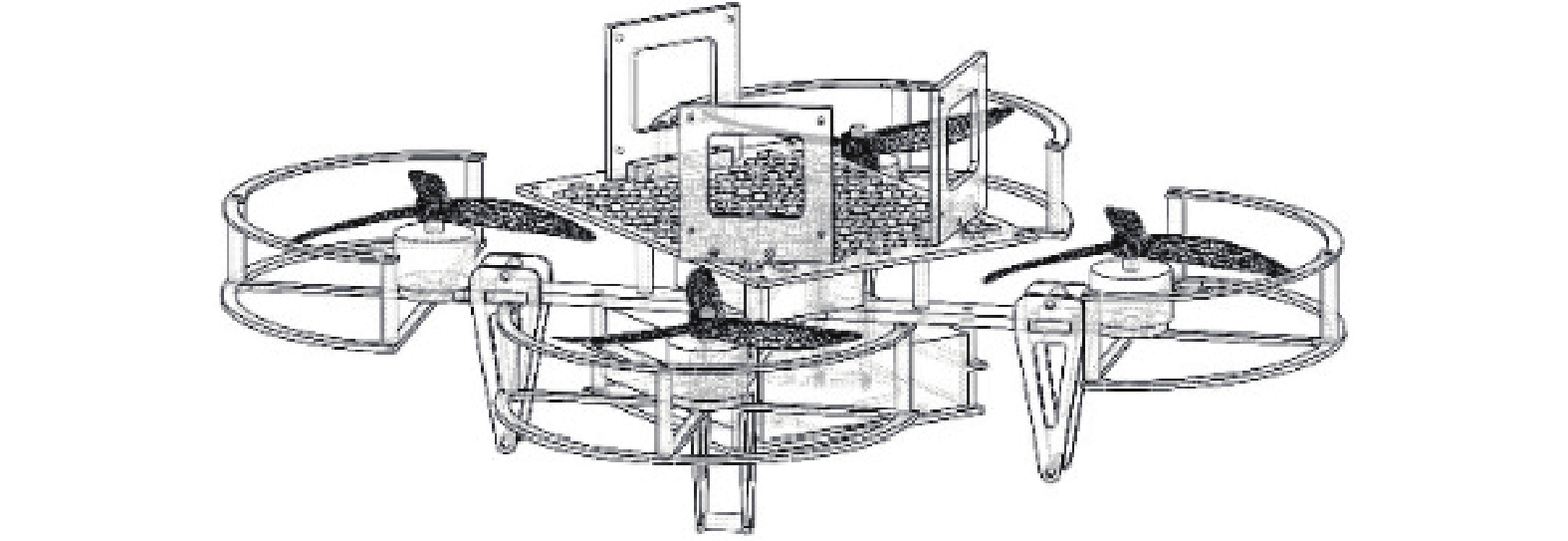
Table 1
Hardware specification"
| Hardware | Detail |
| Intel NUC11TNHi7 | Intel i7-1165G7 117 mm×112 mm×54 mm, 567 g |
| Holybro Pixhawk 6C mini | STM32H743, BMI055 38 mm×55 mm×15.5 mm, 37.2 g |
| Nanoradar MR72 | 0.2−80 m, 100 mm×57 mm×16.5 mm, 15.3 g |
| T-motor F40Pro IV | 2 400 kV, 1.448 kg Φ27.9 mm×29.8 mm, 30.6 g |

Fig 2
Snapshots of navigation in outdoor urban scenes by the quadrotor system"
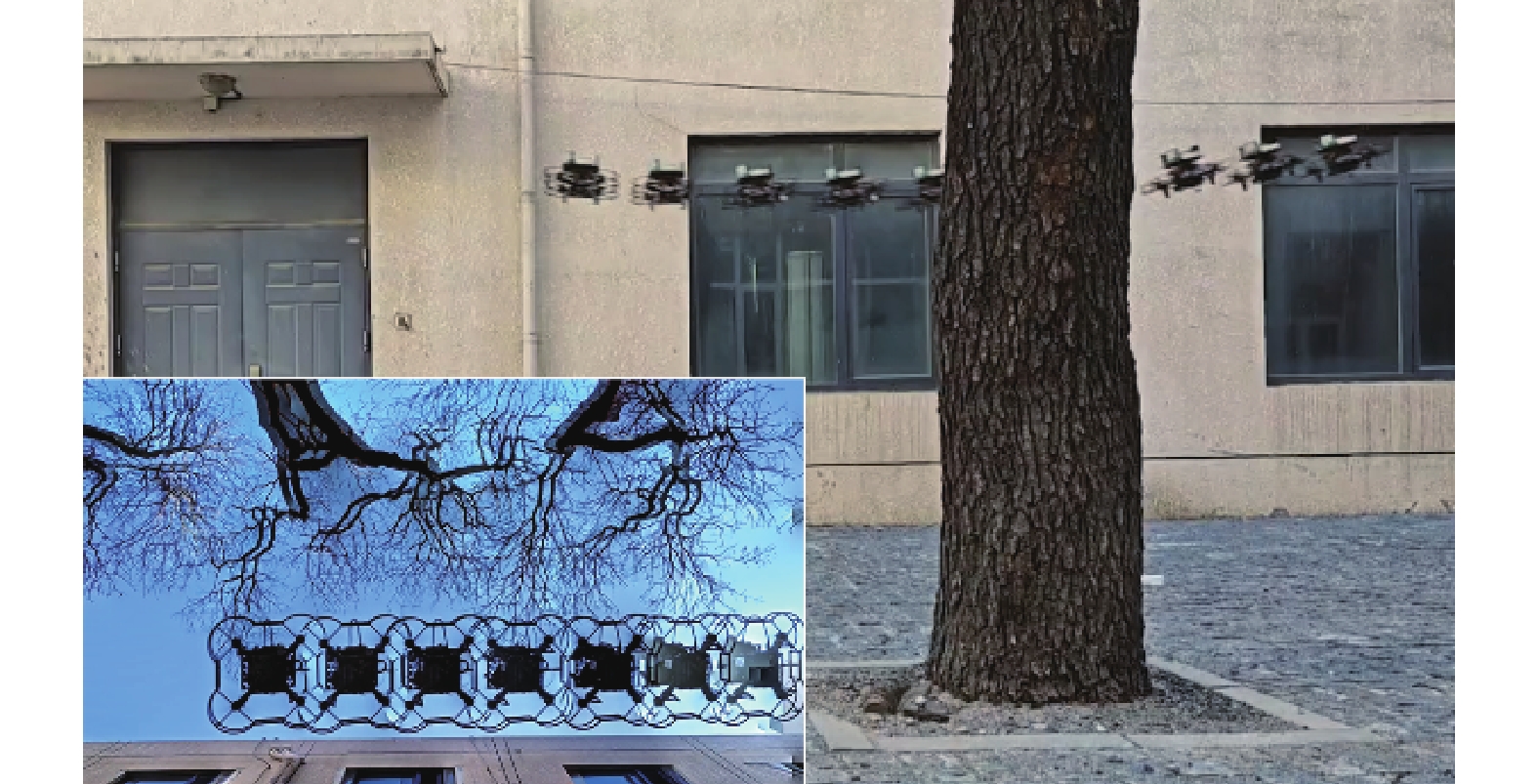
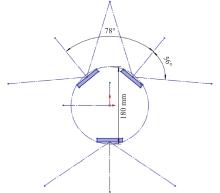
Fig 3
Layout of three millimeter-wave radars"
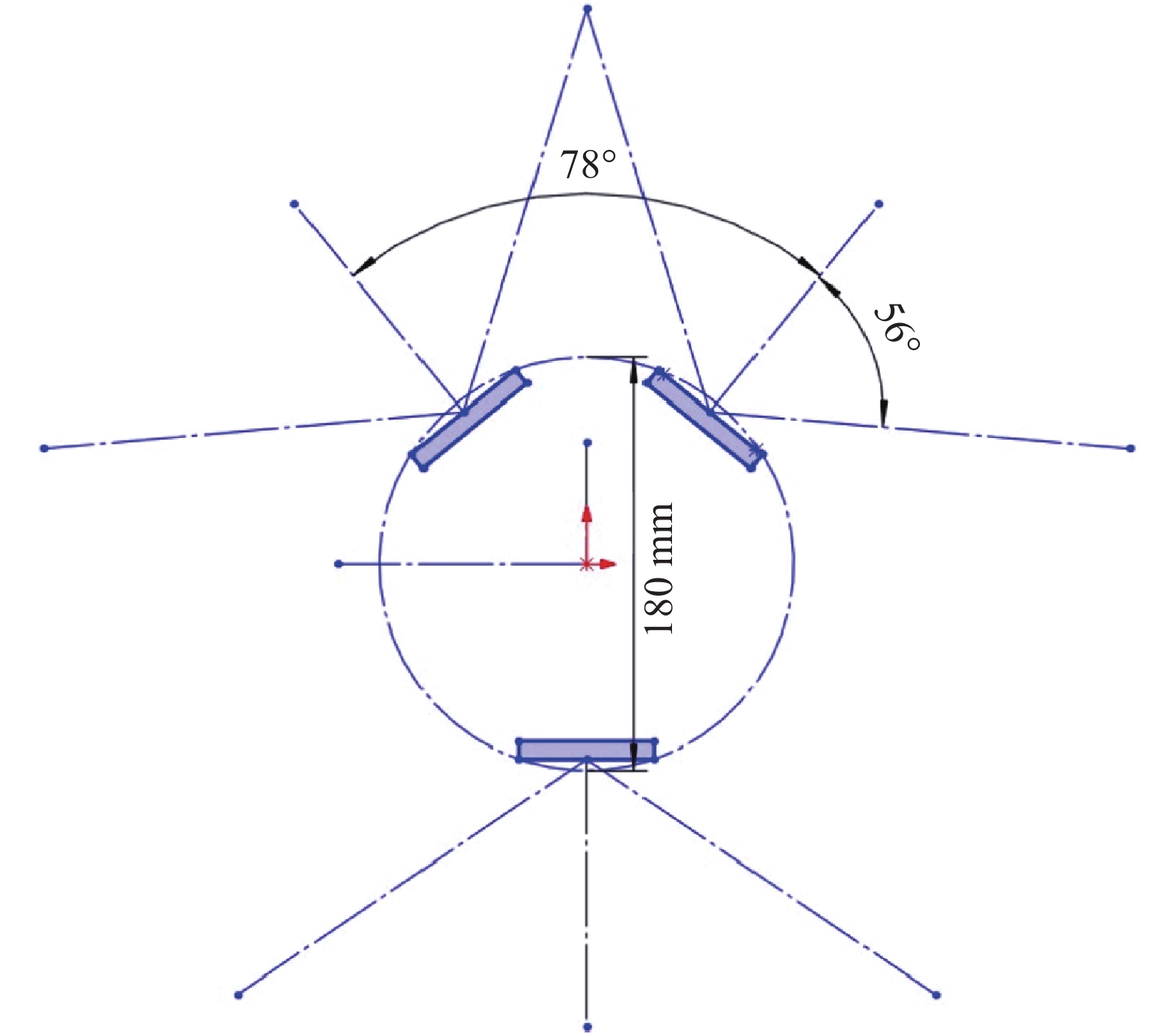

Fig 4
Framework of the perception and mapping module"
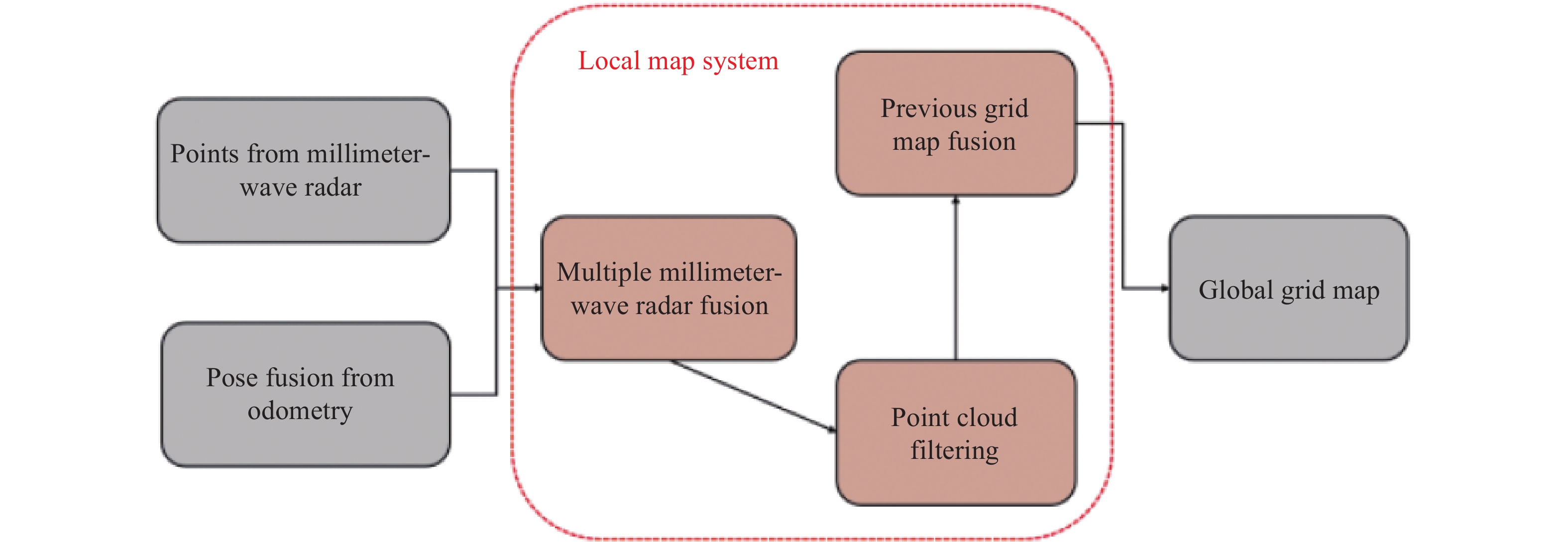
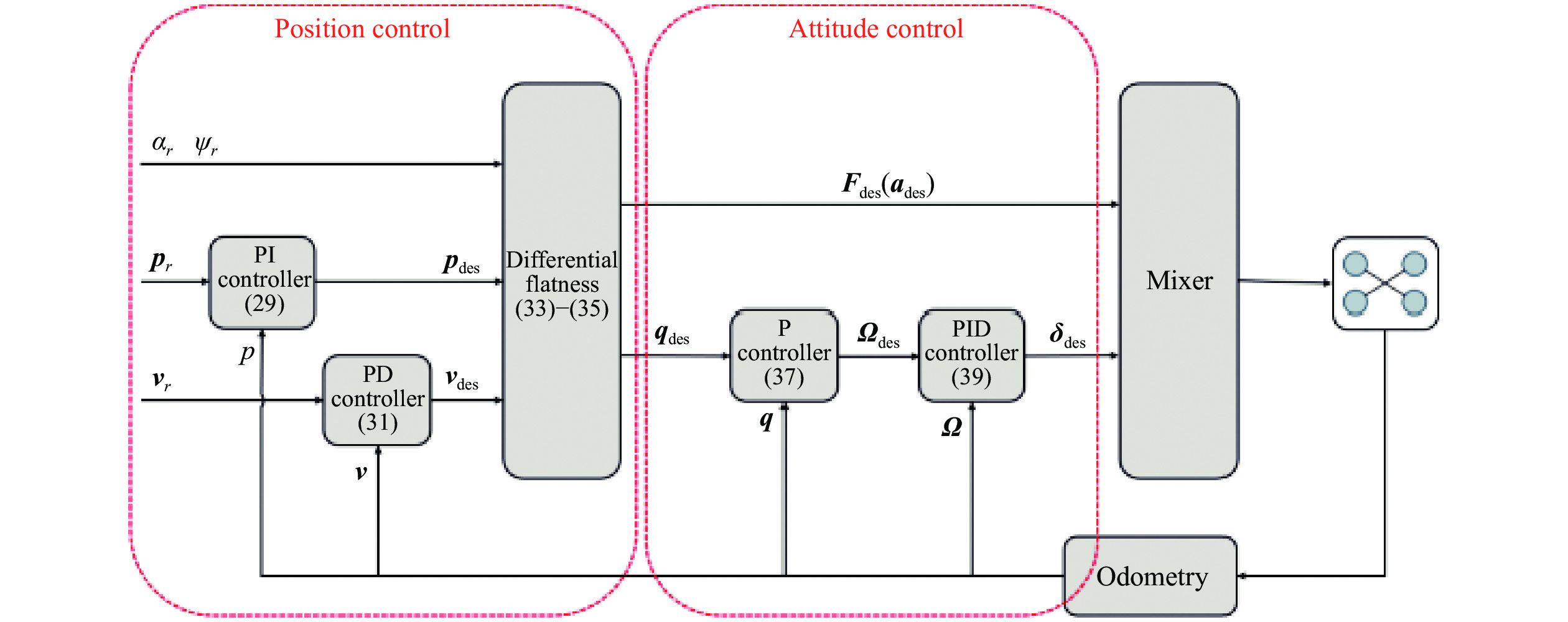
Fig 5
Diagram of the controller structure"

Fig 6
Experimental environment and mapping performance on the environment"
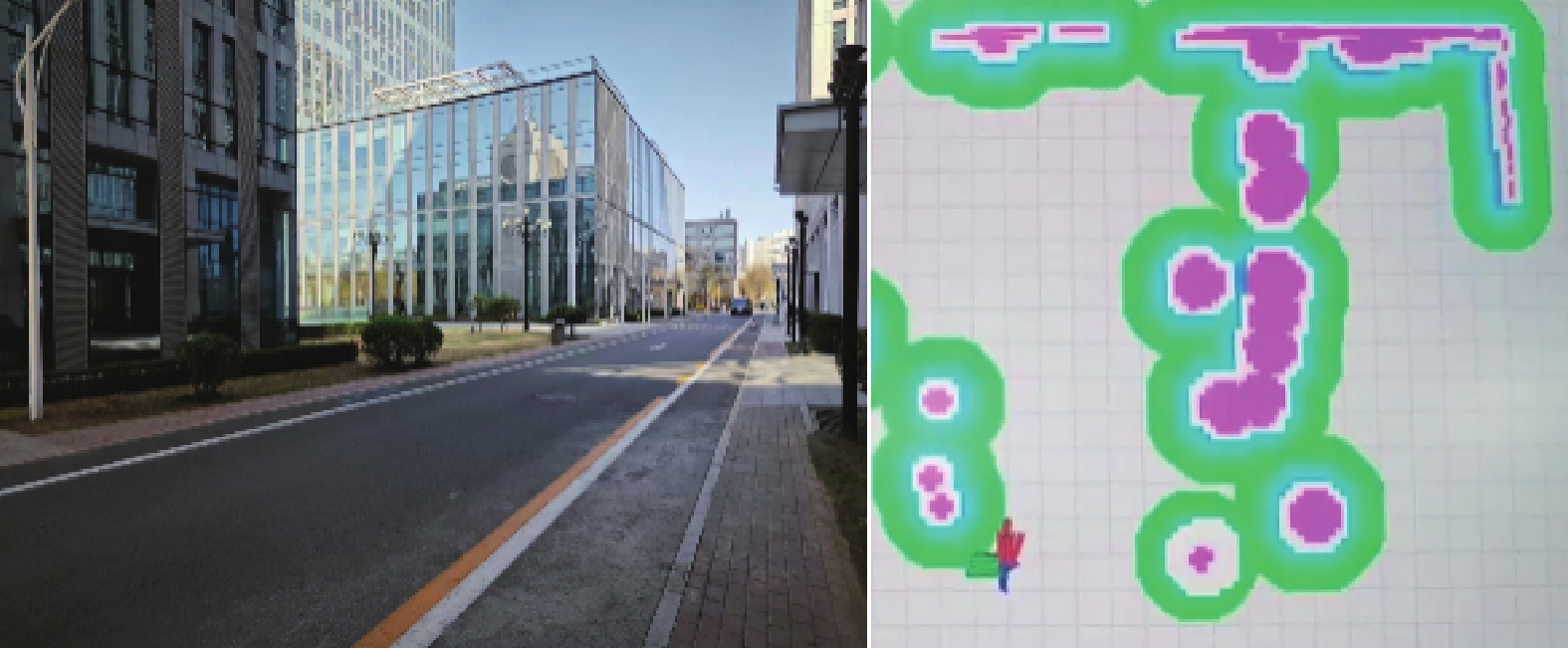
Table 2
Trajectory data in eight typical directions"
| End point/m | vmax/(m/s) | Flight time/s | Tracking error/cm | Collision or not |
| 500, 0 | 3.26 | 367 | 5.09 | × |
| 500, −500 | 3.21 | 617 | 5.51 | × |
| 0, −500 | 3.36 | 392 | 5.59 | × |
| −500, −500 | 3.33 | 644 | 5.33 | × |
| −500, 0 | 3.53 | 356 | 3.80 | × |
| −500, 500 | 3.79 | 647 | 5.10 | × |
| 0, 500 | 3.13 | 351 | 6.47 | × |
| 500, 500 | 3.69 | 669 | 5.35 | × |
| Average | 3.41 | − | 5.28 | × |
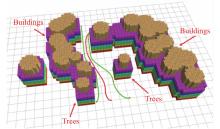
Fig 7
Planning result on the environment"
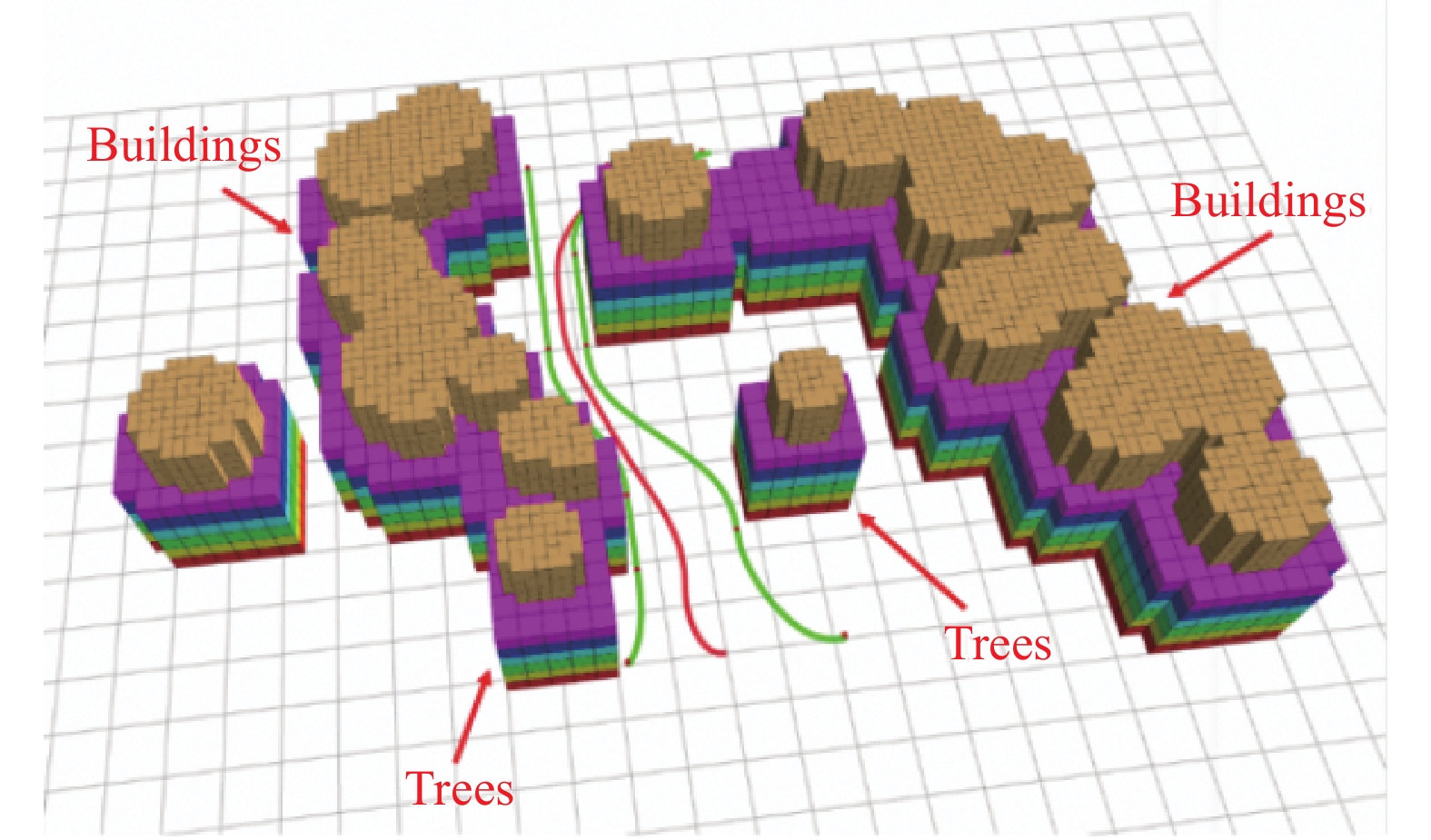

Fig 8
Process of the system autonomously traversing the park"
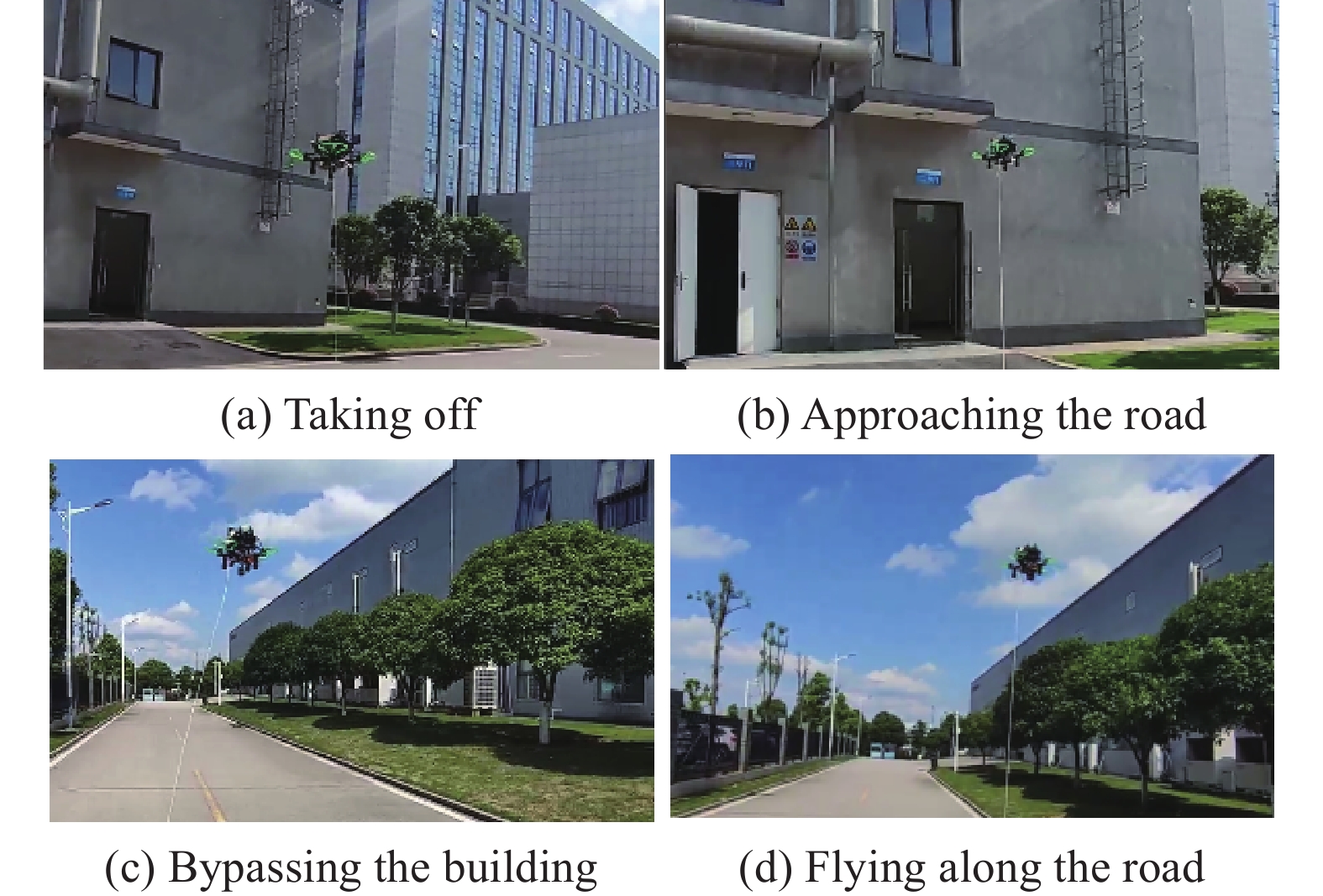
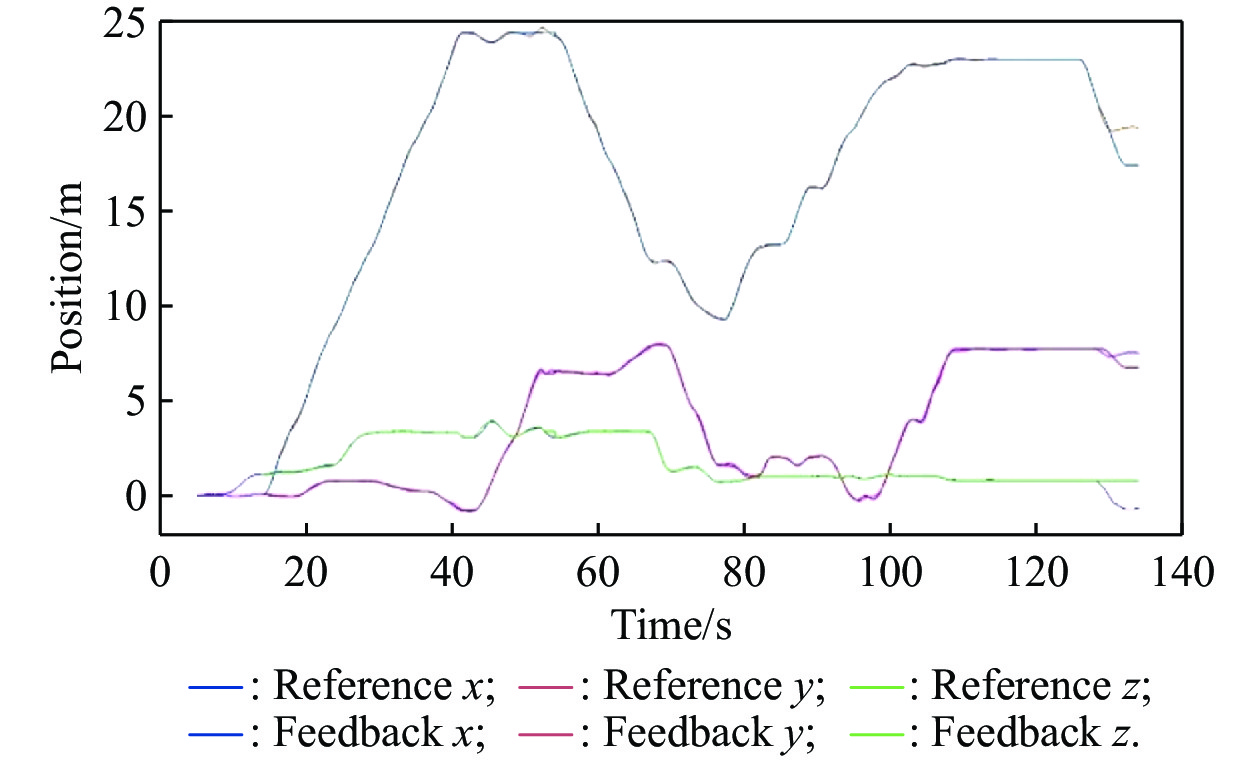
Fig 9
Trajectories of flying around an obstacle"
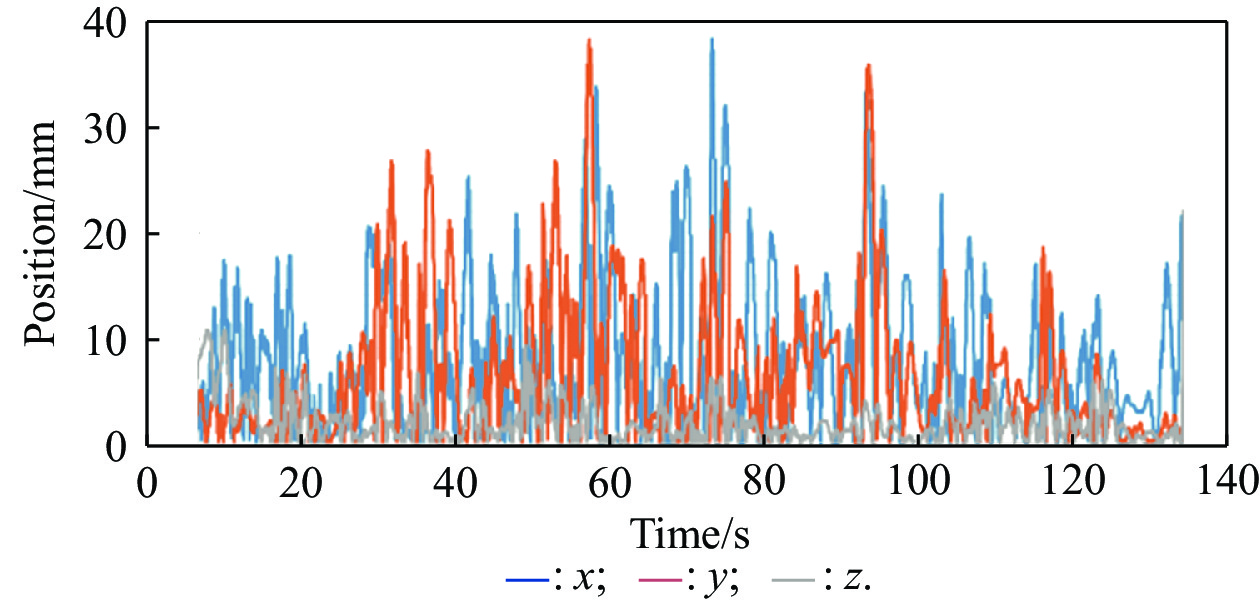
Fig 10
Tracking error of flying around an obstacle"
| 1 | CHEN J, SUN J, WANG G From unmanned systems to autonomous intelligent systems. Engineering, 2022, 12 (1): 16- 19. |
| 2 |
ZHOU B Y, ZHANG Y C, CHEN X Y, et al Fuel: fast UAV exploration using incremental frontier structure and hierarchical planning. IEEE Robotics and Automation Letters, 2021, 6 (2): 779- 786.
doi: 10.1109/LRA.2021.3051563 |
| 3 |
ZHOU B Y, GAO F, WANG L Q, et al Robust and efficient quadrotor trajectory generation for fast autonomous flight. IEEE Robotics and Automation Letters, 2019, 4 (4): 3529- 3536.
doi: 10.1109/LRA.2019.2927938 |
| 4 | ZHOU X, WANG Z P, YE H K, et al Ego-planner: an esdf-free gradient-based local planner for quadrotors. IEEE Robotics and Automation Letters, 2020, 6 (2): 478- 485. |
| 5 |
PFEIFFER C, SCARAMUZZA D Human-piloted drone racing: visual processing and control. IEEE Robotics and Automation Letters, 2021, 6 (2): 3467- 3474.
doi: 10.1109/LRA.2021.3064282 |
| 6 |
RADMANESH M, KUMAR M, GUENTERT P H, et al Overview of path-planning and obstacle avoidance algorithms for UAVs: a comparative study. Unmanned Systems, 2018, 6 (2): 95- 118.
doi: 10.1142/S2301385018400022 |
| 7 |
DONG L, HE Z C, SONG C W, et al A review of mobile robot motion planning methods: from classical motion planning workflows to reinforcement learning-based architectures. Journal of Systems Engineering and Electronics, 2023, 34 (2): 439- 459.
doi: 10.23919/JSEE.2023.000051 |
| 8 | MELLINGER D, KUMAR V. Minimum snap trajectory generation and control for quadrotors. Proc. of the IEEE 28th International Conference on Robotics and Automation, 2011: 2520−2525. |
| 9 | RICHTER C, BRY A, ROY N. Polynomial trajectory planning for aggressive quadrotor flight in dense indoor environments. Proc. of the 16th International Symposium of Robotics Research, 2016: 649−666. |
| 10 | DEITS R, TEDRAKE R. Efficient mixed-integer planning for UAVs in cluttered environments. Proc. of the IEEE 32nd International Conference on Robotics and Automation, 2015: 42−49. |
| 11 |
ZHANG J D, GUO Y K, ZHENG L H, et al Real-time UAV path planning based on LSTM network. Journal of Systems Engineering and Electronics, 2024, 35 (2): 374- 385.
doi: 10.23919/JSEE.2023.000157 |
| 12 |
LIU S K, WATTERSON M, MOHTA K, et al Planning dynamically feasible trajectories for quadrotors using safe flight corridors in 3-D complex environments. IEEE Robotics and Automation Letters, 2017, 2 (3): 1688- 1695.
doi: 10.1109/LRA.2017.2663526 |
| 13 | USENKO V, VONSTUMBERG L, PANGERCIC A, et al. Real-time trajectory replanning for MAVs using uniform B-splines and a 3D circular buffer. Proc. of the IEEE/RSJ 30th International Conference on Intelligent Robots and Systems, 2017: 215−222. |
| 14 |
DING W C, GAO W L, WANG K X, et al An efficient B-spline-based kinodynamic replanning framework for quadrotors. IEEE Trans. on Robotics, 2019, 35 (6): 1287- 1306.
doi: 10.1109/TRO.2019.2926390 |
| 15 | ZHOU B Y, GAO F, PAN J, et al. Robust real-time UAV replanning using guided gradient-based optimization and topological paths. Proc. of the IEEE 37th International Conference on Robotics and Automation, 2020: 1208−1214. |
| 16 |
WANG Z P, ZHOU X, XU C, et al Geometrically constrained trajectory optimization for multicopters. IEEE Trans. on Robotics, 2022, 38 (5): 3259- 3278.
doi: 10.1109/TRO.2022.3160022 |
| 17 | AIRBUS. AIRBUS SKYWAYS: the future of the pracel delivery in smart cities. https://www.embention.com/projects/airbus-parcel-delivery/. |
| 18 | QUAN Q, FU R, LI M X, et al Practical distributed control for VTOL UAVs to pass a virtual tube. IEEE Trans. on Intelligent Vehicles, 2021, 7 (2): 342- 353. |
| 19 |
QUAN Q, GAO Y, BAI C G Distributed control for a robotic swarm to pass through a curve virtual tube. Robotics and Autonomous Systems, 2023, 162, 104368.
doi: 10.1016/j.robot.2023.104368 |
| 20 | GAO Y, BAI C G, ZHANG L, et al Multi-UAV cooperative target encirclement within an annular virtual tube. Aerospace Science and Technology, 2022, 128 (1): 107800. |
| 21 | MAO P D, QUAN Q. Making robotics swarm flow more smoothly: a regular virtual tube model. Proc. of the 35th IEEE/RSJ International Conference on Intelligent Robots and Systems, 2022: 4498−4504. |
| 22 |
GAO Y, BAI C G, QUAN Q Distributed control for a multi-agent system to pass through a connected quadrangle virtual tube. IEEE Trans. on Control of Network Systems, 2023, 10 (2): 693- 705.
doi: 10.1109/TCNS.2022.3203936 |
| 23 |
MAO P D, FU R, QUAN Q Optimal virtual tube planning and control for swarm robotics. The International Journal of Robotics Research, 2024, 43 (5): 602- 627.
doi: 10.1177/02783649231210012 |
| 24 |
BESL P J, MCKAY N D A method for registration of 3-D shapes. IEEE Trans. on Pattern Analysis and Machine Intelligence, 1992, 14 (2): 239- 256.
doi: 10.1109/34.121791 |
| 25 | ZHANG J Y, YAO Y X, DENG B L Fast and robust iterative closest point. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2022, 44 (7): 3450- 3466. |
| 26 | ZHANG Z C, SCARAMUZZA D. Perception-aware receding horizon navigation for MAVs. Proc. of the IEEE 35th International Conference on Robotics and Automation, 2018: 2534−2541. |
| 27 | YU Y, YANG S, WANG M X, et al. High performance full attitude control of a quadrotor on SO(3). Proc. of the IEEE 32nd International Conference on Robotics and Automation, 2015: 1698−1703. |
| 28 |
KOENIG S, LIKHACHEV M Fast replanning for navigation in unknown terrain. IEEE Trans. on Robotics, 2005, 21 (3): 354- 363.
doi: 10.1109/TRO.2004.838026 |
| 29 | HARABOR D, GRASTIEN A. Online graph pruning for pathfinding on grid maps. Proc. of the 25th AAAI Conference on Artificial Intelligence, 2011: 1114−1119. |
| 30 |
SUN S H, ROMERO A, FOEHN P, et al A comparative study of nonlinear mpc and differential-flatness-based control for quadrotor agile flight. IEEE Trans. on Robotics, 2022, 38 (6): 3357- 3373.
doi: 10.1109/TRO.2022.3177279 |
| 31 |
MAHONY R, KUMAR V, CORKE P Multirotor aerial vehicles: modeling, estimation, and control of quadrotor. IEEE Robotics and Automation Magazine, 2012, 19 (3): 20- 32.
doi: 10.1109/MRA.2012.2206474 |
| [1] | Xiuxia YANG, Yi ZHANG, Weiwei ZHOU. Obstacle avoidance method of three-dimensional obstacle spherical cap [J]. Journal of Systems Engineering and Electronics, 2018, 29(5): 1058-1068. |
| [2] | Jingliang Sun and Chunsheng Liu. Optimal obstacle avoidance via distributed consensus algorithms with communication delay [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1272-1282. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||