
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (2): 247-258.doi: 10.23919/JSEE.2022.000025
• ELECTRONICS TECHNOLOGY • Next Articles
Liangliang WANG1,2( ), Gongjian ZHOU1,2,*()
), Gongjian ZHOU1,2,*()
Received:2021-01-08
Accepted:2022-02-15
Online:2022-05-06
Published:2022-05-06
Contact:
Gongjian ZHOU
E-mail:awang_liang_liang@163.com;zhougj@hit.edu.cn
About author:Supported by:Liangliang WANG, Gongjian ZHOU. Multiframe track-before-detect method based on velocity filtering in mixed coordinates[J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 247-258.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
Curves of ${\boldsymbol{\mu}}$ vs. velocity mismatch error ${\boldsymbol{\Delta}} {\boldsymbol{v}}$ "
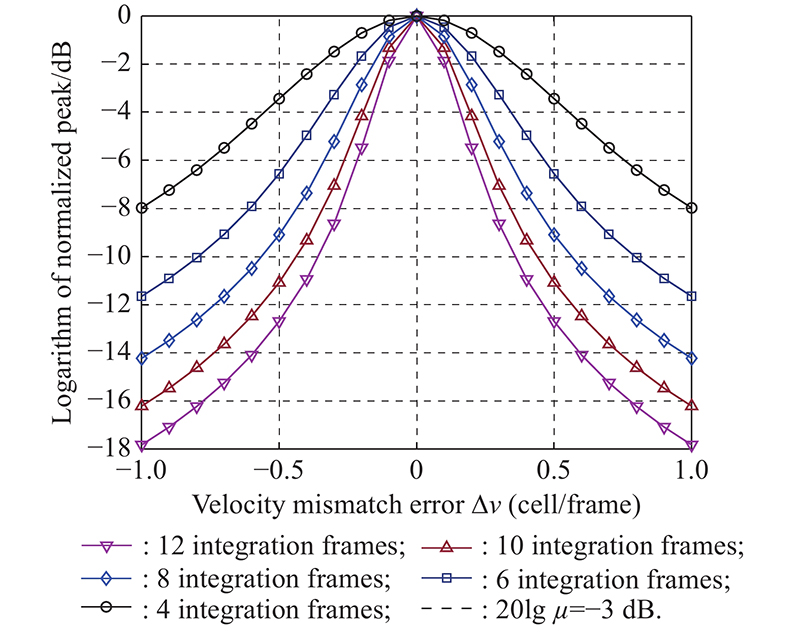
Table 1
Threshold values for different numbers of integration frames"
| Number of frames | Threshold value | Number of frames | Threshold value | |
| 4 | 5.89 | 9 | 11.41 | |
| 5 | 7.04 | 10 | 12.45 | |
| 6 | 8.15 | 11 | 13.32 | |
| 7 | 9.26 | 12 | 13.82 | |
| 8 | 10.34 | ? | ? |
Fig 2
Integration result from the conventional A-DP-TBD"
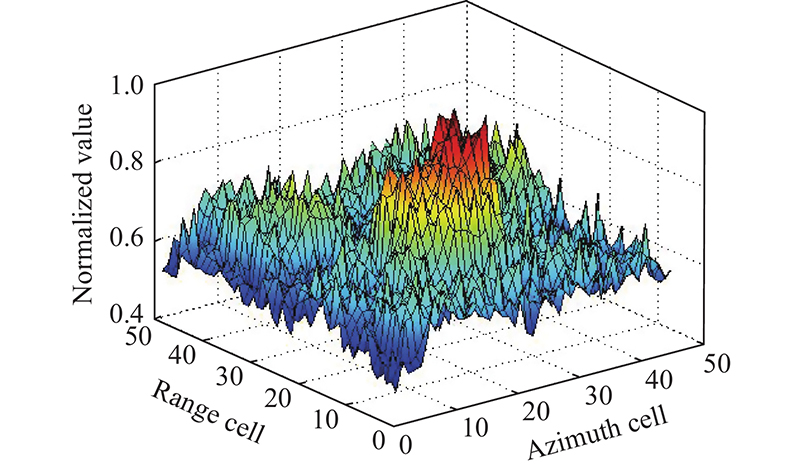
Fig 3
Integration result from the conventional LLR-DP-TBD"
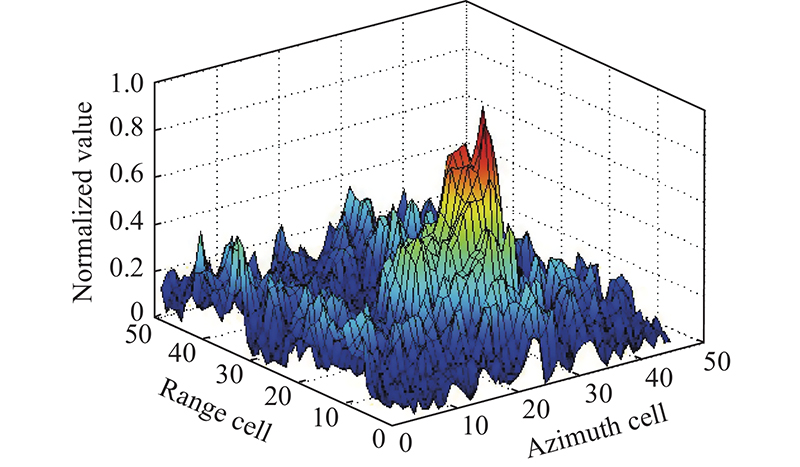
Fig 4
Integration result from the conventional VF-TBD using approximate CV model in range-azimuth plane"
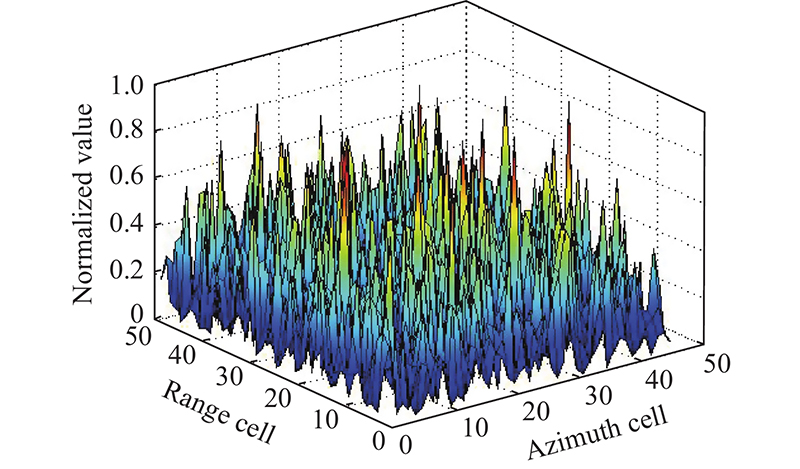
Fig 5
Integration result from the proposed MC-VF-TBD"
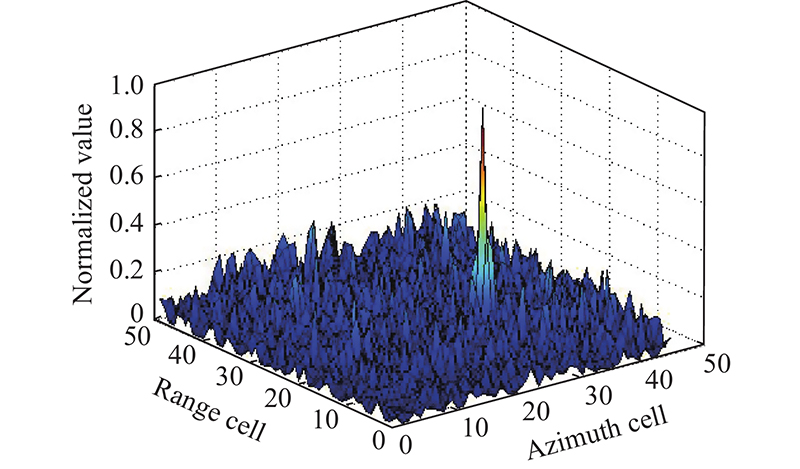
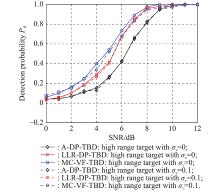
Fig 6
Detection probabilities vs. input SNR for six integration frames in high range bins"
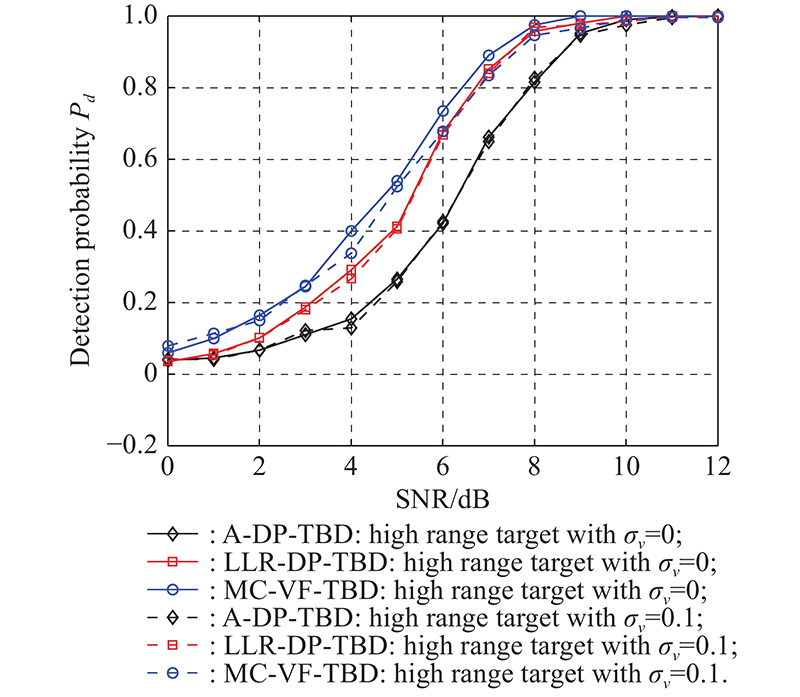
Fig 7
RMSE values vs. input SNR for six integration frames in high range bins"
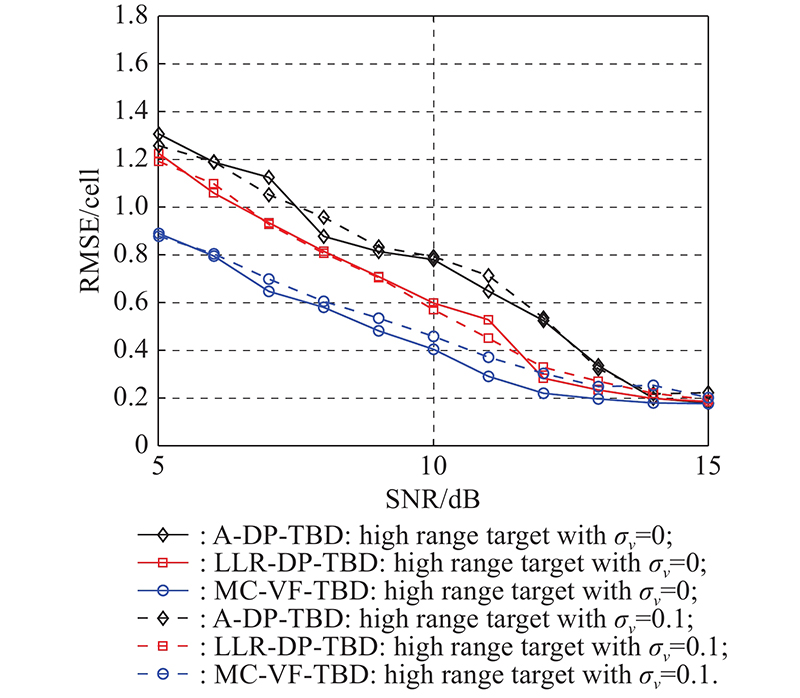
Fig 8
Detection probabilities vs. input SNR for six integration frames in low range bins"
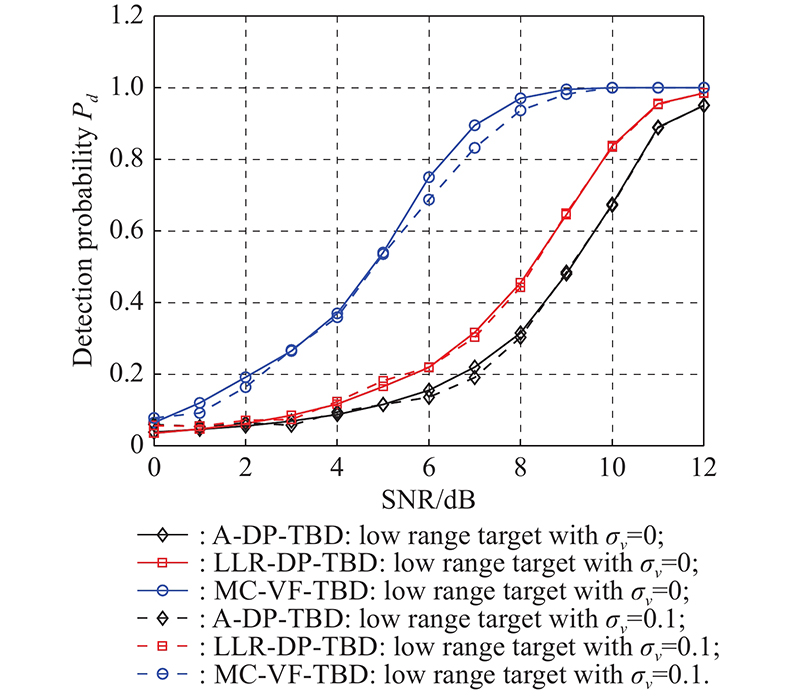
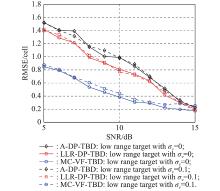
Fig 9
RMSE values vs. input SNR for six integration frames in low range bins"
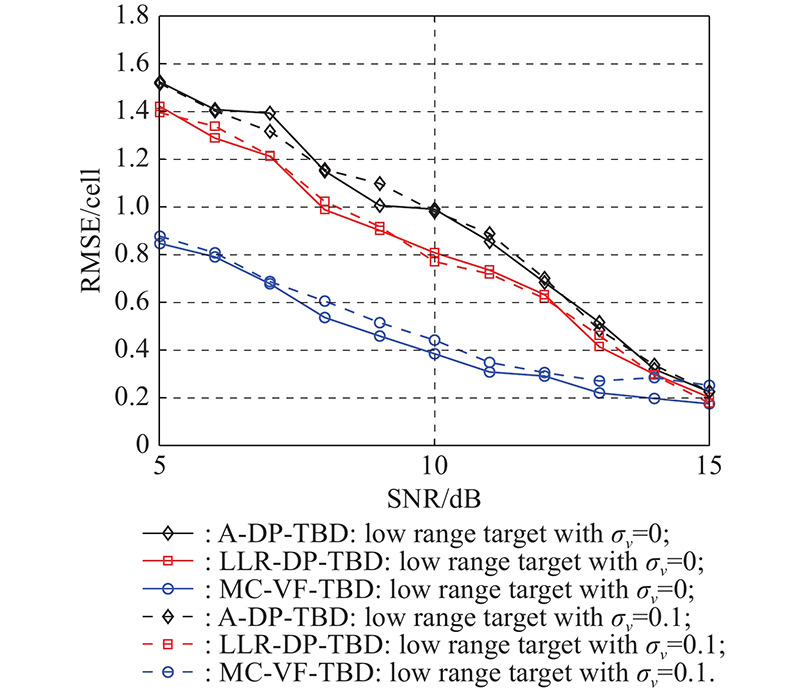
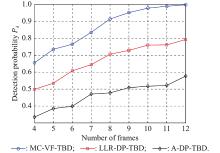
Fig 10
Detection probabilities vs. number of frames for 6 dB input SNR in high range bins"
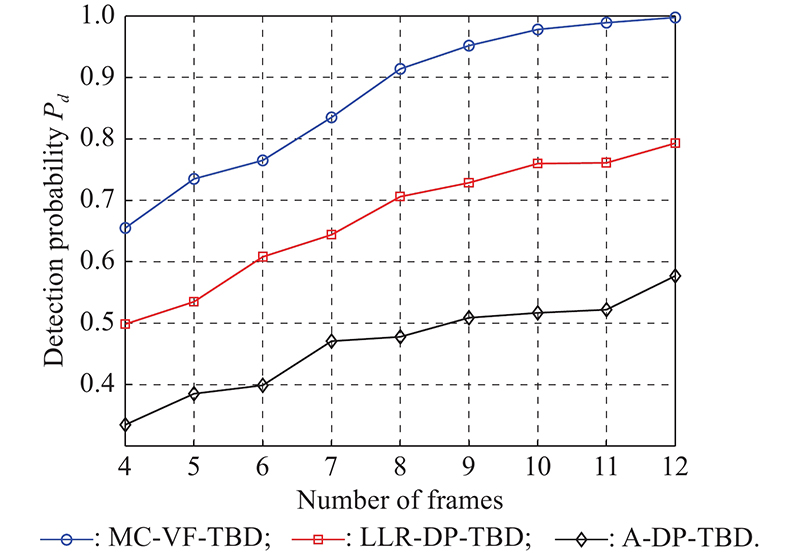
Fig 11
RMSE values vs. number of integration frames for 6 dB input SNR in high range bins"
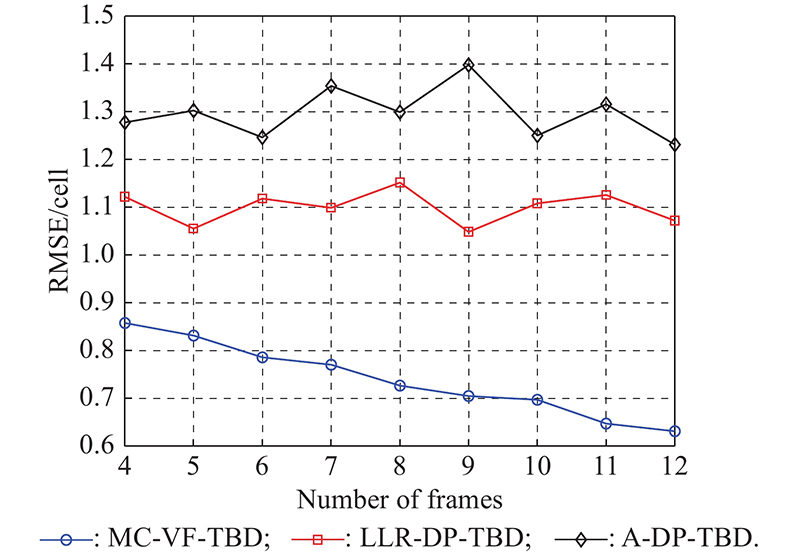
Fig 12
Detection probabilities vs. number of frames for 6 dB input SNR in low range bins"

Fig 13
RMSE values vs. number of integration frames for 6 dB input SNR in low range bins"
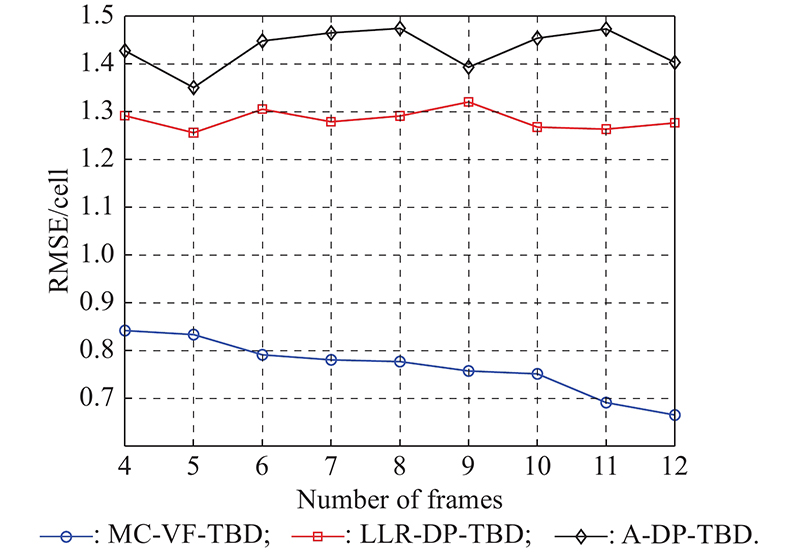
Fig 14
Trajectories of five targets in a multi-target scenario"
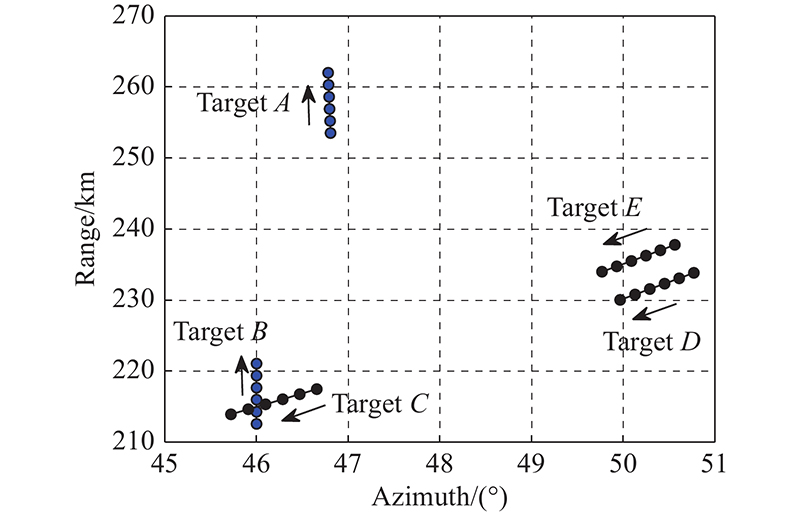
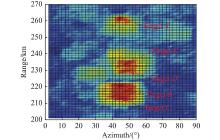
Fig 15
Multiframe integration in MT-DP-TBD"
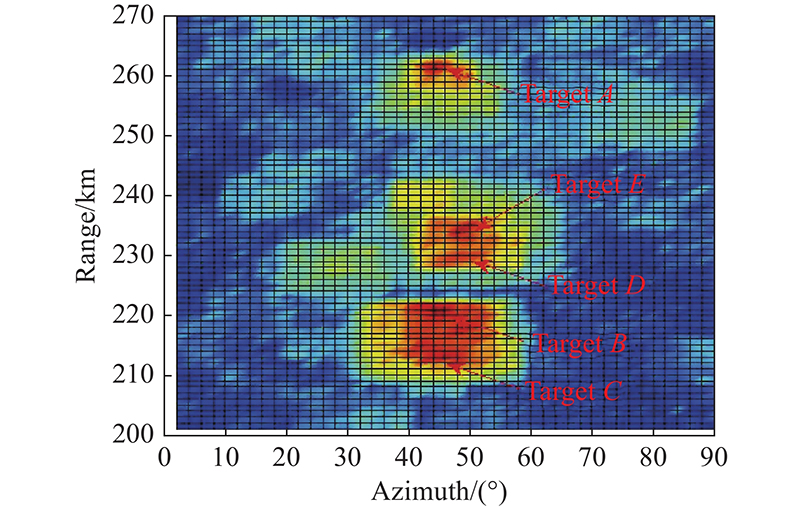
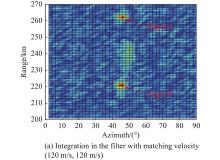
Fig 16
"
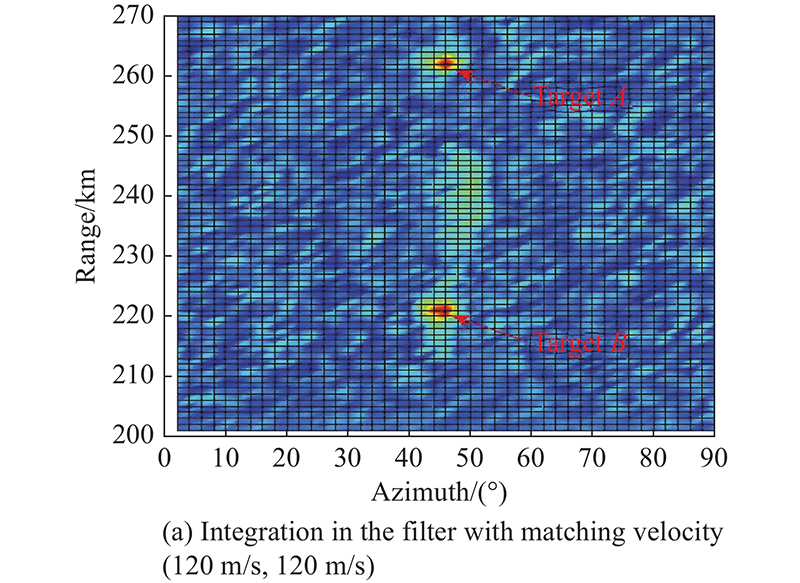
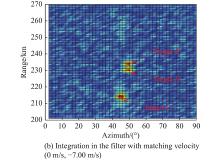
Fig 16
Multiframe integration in the proposed MC-VF-TBD"
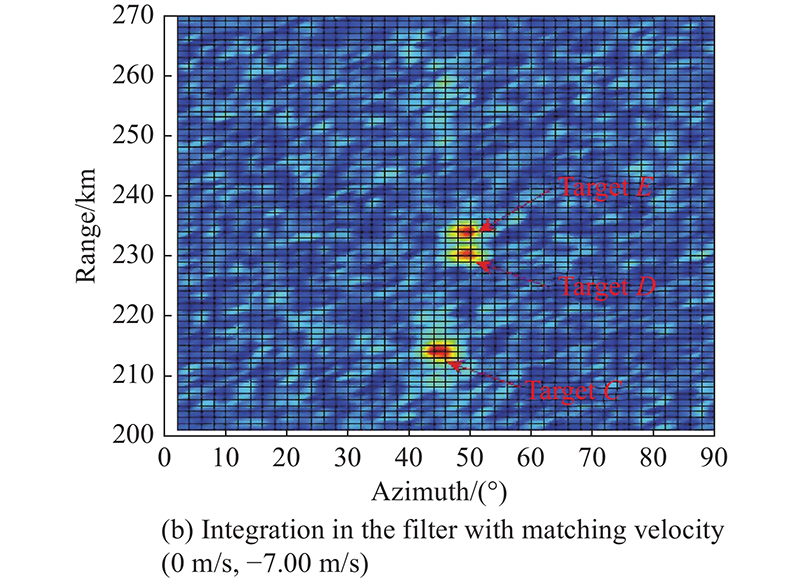
Fig 17
Detection probabilities of five targets vs. input SNR in case of six integration frames"
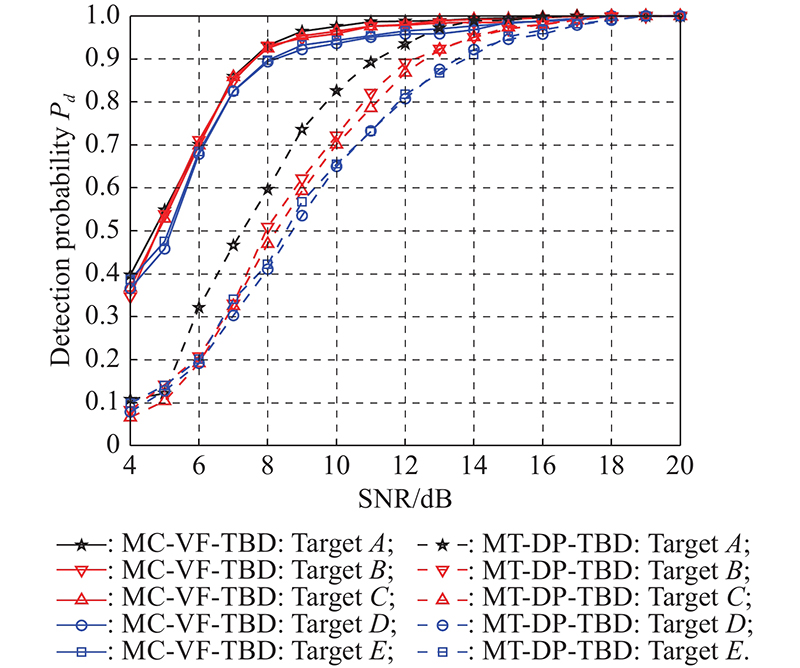
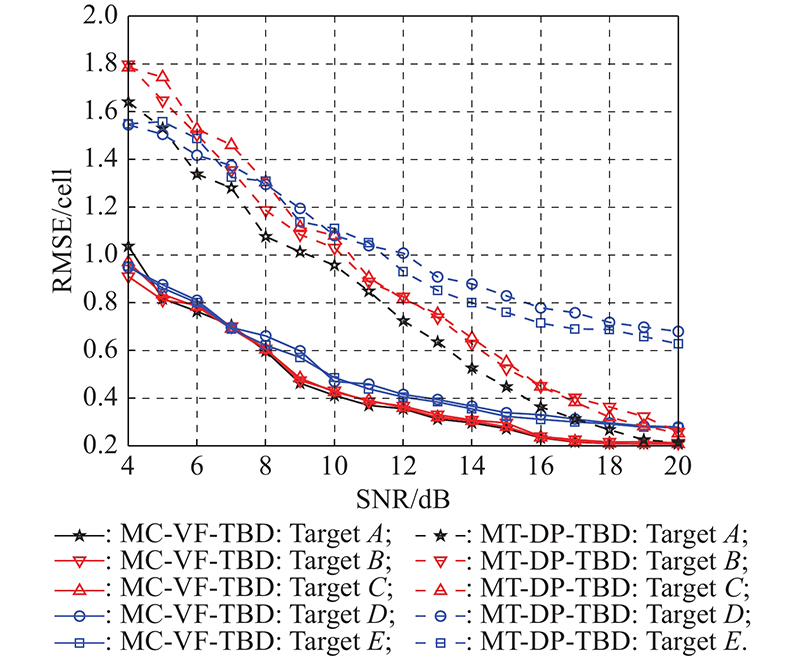
Fig 18
RMSE values of five targets vs. input SNR in case of six integration frames"
| 1 | BAR-SHALOM Y, LI X R, KIRUBARAJAN T. Estimation with applications to tracking and navigation: theory, algorithms, and software. New York: Wiley, 2001. |
| 2 |
ORLANDO D, RICCI G, BAR-SHALOM Y Track-before-detect algorithms for targets with kinematic constraints. IEEE Trans. on Aerospace and Electronic Systems, 2011, 47 (3): 1837- 1849.
doi: 10.1109/TAES.2011.5937268 |
| 3 | STOCKER A D, JENSEN P D Algorithms and architectures for imple-menting large-velocity filter banks. SPIE Signal and Data Processing of Small Targets, 1991, 1481, 140- 155. |
| 4 |
JIANG H C, YI W, CUI G L, et al Knowledge-based track-before-detect strategies for fluctuating targets in k-distributed clutter . IEEE Sensors Journal, 2016, 16 (19): 7124- 7132.
doi: 10.1109/JSEN.2016.2597320 |
| 5 |
DIAMANT R, KIPNIS D, BIGAL E, et al An active acoustic track-before-detect approach for finding underwater mobile targets. IEEE Journal of Selected Topics in Signal Processing, 2019, 13 (1): 104- 119.
doi: 10.1109/JSTSP.2019.2899237 |
| 6 |
WANG J H, YI W, HOSEINNEZHAD R, et al An agile multi-frame detection method for targets with time-varying existence. Signal Processing, 2019, 165, 133- 143.
doi: 10.1016/j.sigpro.2019.07.001 |
| 7 |
APRILE W A, GROSSI E, LOPS M, et al Track-before-detect for sea clutter rejection: tests with real data. IEEE Trans. on Aerospace and Electronic Systems, 2016, 52 (3): 1035- 1045.
doi: 10.1109/TAES.2016.140851 |
| 8 |
GROSSI E, LOPS M, VENTURINO L A novel dynamic programming algorithm for track-before-detect in radar systems. IEEE Trans. on Signal Processing, 2013, 61 (10): 2608- 2619.
doi: 10.1109/TSP.2013.2251338 |
| 9 |
YI W, KONG L J, YANG J Y Thresholding process based dynamic programming track-before-detect algorithm. IEICE Trans. on Communications, 2013, E96.B (1): 291- 300.
doi: 10.1587/transcom.E96.B.291 |
| 10 |
GRCIA-FERNANDEZ A F Track-before-detect labeled multi-Bernoulli particle filter with label switching. IEEE Trans. on Aerospace and Electronic Systems, 2016, 52 (5): 2123- 2138.
doi: 10.1109/TAES.2016.150343 |
| 11 |
BOERS Y, MANDAL P K Optimal particle-filter-based detector. IEEE Signal Processing Letters, 2019, 26 (3): 435- 439.
doi: 10.1109/LSP.2019.2895279 |
| 12 |
GARCIA-FERNANDEZ A F, GRAJAL J, MORELANDE M R Two-layer particle filter for multiple target detection and tracking. IEEE Trans. on Aerospace and Electronic Systems, 2013, 49 (3): 1569- 1588.
doi: 10.1109/TAES.2013.6558005 |
| 13 |
NGUYEN H V, REZATOFIGHI H, VO B N, et al Online UAV path planning for joint detection and tracking of multiple radio-tagged objects. IEEE Trans. on Signal Processing, 2019, 67 (20): 5365- 5379.
doi: 10.1109/TSP.2019.2939076 |
| 14 |
VO B N, VO B T, PHAM N T, et al Joint detection and estimation of multiple objects from image observations. IEEE Trans. on Signal Processing, 2010, 58 (10): 5129- 5141.
doi: 10.1109/TSP.2010.2050482 |
| 15 | LI W J, YI W, WEN M, et al Multi-PRF and multi-frame track-before-detect algorithm in multiple PRF radar system. Signal Processing, 2020, 174, 107648. |
| 16 |
YI W, MORELANDE M R, KONG L J, et al An efficient multi-frame track-before-detect algorithm for multi-target tracking. IEEE Journal of Selected Topics in Signal Processing, 2013, 7 (3): 421- 434.
doi: 10.1109/JSTSP.2013.2256415 |
| 17 |
YI W, JIANG H C, KIRUBARAJAN T, et al Track-before-detect strategies for radar detection in G0-distributed clutter. IEEE Trans. on Aerospace and Electronic Systems, 2017, 53 (5): 2516- 2533.
doi: 10.1109/TAES.2017.2702259 |
| 18 |
ZHOU G J, WANG L L, KIRUBARAJAN T A pseudo-spectrum approach for weak target detection and tracking. IEEE Trans. on Aerospace and Electronic Systems, 2019, 55 (6): 3394- 3412.
doi: 10.1109/TAES.2019.2906419 |
| 19 | WANG L L, ZHOU G J, LI P Y A complex pseudo-spectrum based velocity filtering method for track-before-detect. Signal Processing, 2020, 174, 107651. |
| 20 | REED I S, GAGLIARDI R M, SHAO H M Application of three-dimensional filtering to moving target detection. IEEE Trans. on Aerospace and Electronic Systems, 1983, 19 (6): 898- 905. |
| 21 |
KENNEDY H L Efficient velocity filter implementations for dim target detection. IEEE Trans. on Aerospace and Electronic Systems, 2011, 47 (4): 2991- 2999.
doi: 10.1109/TAES.2011.6034680 |
| 22 | DRAGOVIC M. Velocity filtering for target detection and track initiation. Edinburgh South Australia: DSTO Systems Sciences Laboratory, 2003:1-55. |
| 23 |
ACITO N, CORSINI G, DIANI M Detection performance loss due to jitter in naval IRST systems. IEEE Trans. on Aerospace and Electronic Systems, 2008, 44 (1): 326- 338.
doi: 10.1109/TAES.2008.4517007 |
| 24 |
LAMPROPOULOS G A, BOULTER J F Filtering of moving targets using SBIR sequential frames. IEEE Trans. on Aerospace and Electronic Systems, 1995, 31 (4): 1255- 1267.
doi: 10.1109/7.464349 |
| 25 |
DENG X, PI Y, MORELANDE M, et al Track-before-detect procedures for low pulse repetition frequency surveillance radars. IET Radar, Sonar & Navigation, 2011, 5 (1): 65- 73.
doi: 10.1049/iet-rsn.2009.0245 |
| 26 |
ZHOU G J, WANG L L Pseudo-spectrum based speed square filter for track-before-detect in range-Doppler domain. IEEE Trans. on Signal Processing, 2019, 67 (21): 5596- 5610.
doi: 10.1109/TSP.2019.2943256 |
| 27 |
ELHOSHY M, GEBALI F, GULLIVER T A Expanding window dynamic-programming-based track-before-detect with order statistics in Weibull distributed clutter. IEEE Trans. on Aerospace and Electronic Systems, 2020, 56 (4): 2564- 2575.
doi: 10.1109/TAES.2019.2948451 |
| 28 |
YI W, FU L Z, GARCIA-FERNANDEZ A F, et al Particle filtering based track-before-detect method for passive array sonar systems. Signal Processing, 2019, 165, 303- 314.
doi: 10.1016/j.sigpro.2019.07.027 |
| 29 |
EHLERS F, ORLANDO D, RICCI G Batch tracking algorithm for multistatic sonars. IET Radar, Sonar & Navigation, 2012, 6 (8): 746- 752.
doi: 10.1049/iet-rsn.2011.0266 |
| 30 |
YI W, FANG Z C, LI W J, et al Multi-frame track-before-detect algorithm for maneuvering target tracking. IEEE Trans. on Vehicular Technology, 2020, 69 (4): 4104- 4118.
doi: 10.1109/TVT.2020.2976095 |
| 31 |
JIANG H C, YI W, KIRUBARAJAN T, et al Multiframe radar detection of fluctuating targets using phase information. IEEE Trans. on Aerospace and Electronic Systems, 2017, 53 (2): 736- 749.
doi: 10.1109/TAES.2017.2664639 |
| 32 | SINGER P F Performance analysis of a velocity filter bank. SPIE Signal and Data Processing of Small Targets, 1997, 3163, 96- 107. |
| 33 | WANG L L, ZHOU G J, HE J, et al Track-before-detect strategy for radar detection in Rayleigh-distributed noise. Proc. of the 22nd International Conference on Information Fusion, 2019, 1- 7. |
| 34 | JIANG H C, YI W, CUI G L, et al Track-before-detect strategy for HRR radars. Proc. of the IEEE Radar Conference, 2015, 362- 367. |
| 35 | WANG L L, ZHOU G J, KIRUBARAJAN T Track-before-detect technique in mixed coordinates. Proc. of the 21st International Conference on Information Fusion, 2018, 302- 307. |
| 36 | KAY S M. Fundamentals of statistical signal processing. Beijing: Publishing House of Electronics Industry, 2006. (in Chinese) |
| [1] | Meiyan PAN, Jun SUN, Yuhao YANG, Dasheng LI, Junpeng YU. M-FCN based sea-surface weak target detection [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1111-1118. |
| [2] | Zeng Jiankui & He Zishu. Detection of weak target for MIMO radar based on Hough transform [J]. Journal of Systems Engineering and Electronics, 2009, 20(1): 76-80. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||