
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (5): 1195-1209.doi: 10.23919/JSEE.2022.000115
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Zhuanhua ZHANG( ), Gongjian ZHOU*()
), Gongjian ZHOU*()
Received:2021-04-22
Online:2022-10-27
Published:2022-10-27
Contact:
Gongjian ZHOU
E-mail:zhuanhuazhang@163.com;zhougj@hit.edu.cn
About author:Supported by:Zhuanhua ZHANG, Gongjian ZHOU. Maneuvering target state estimation based on separate modeling of target trajectory shape and dynamic characteristics[J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1195-1209.
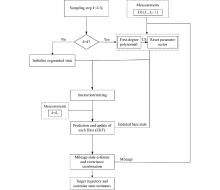
Fig 1
Flowchart of the proposed tracking algorithm"
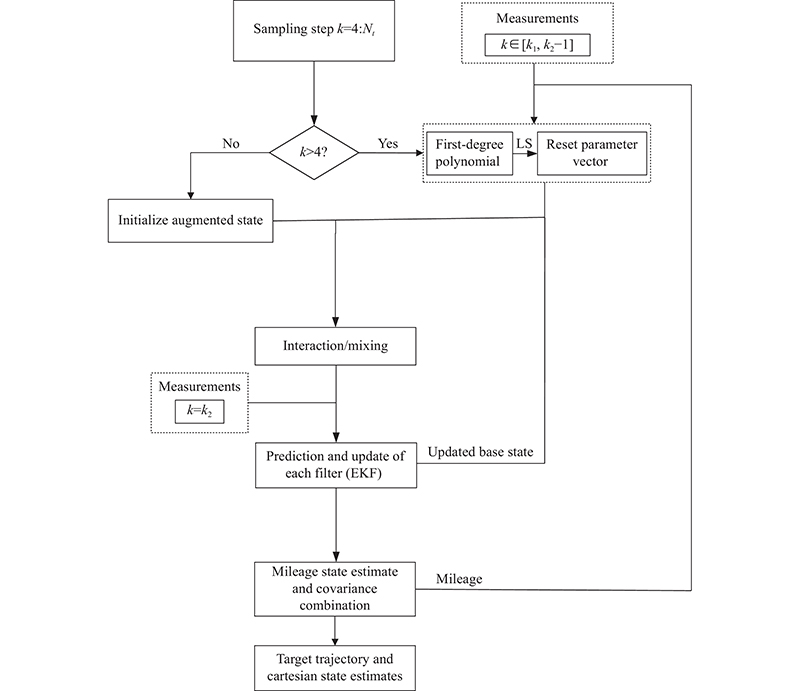

Fig 2
RMSEs of state estimates and 95% probabilityinterval for the linear trajectory case"
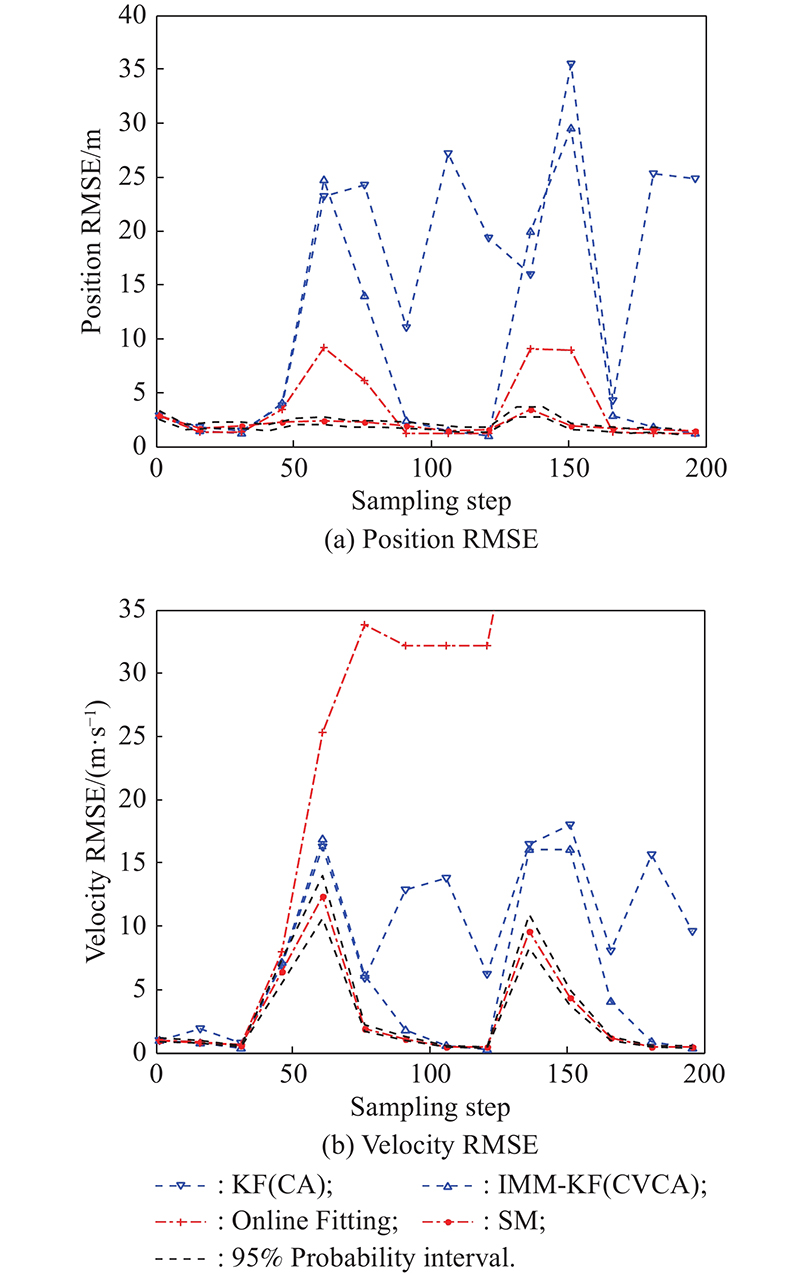
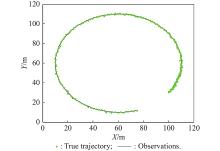
Fig 3
Circular arc trajectory"
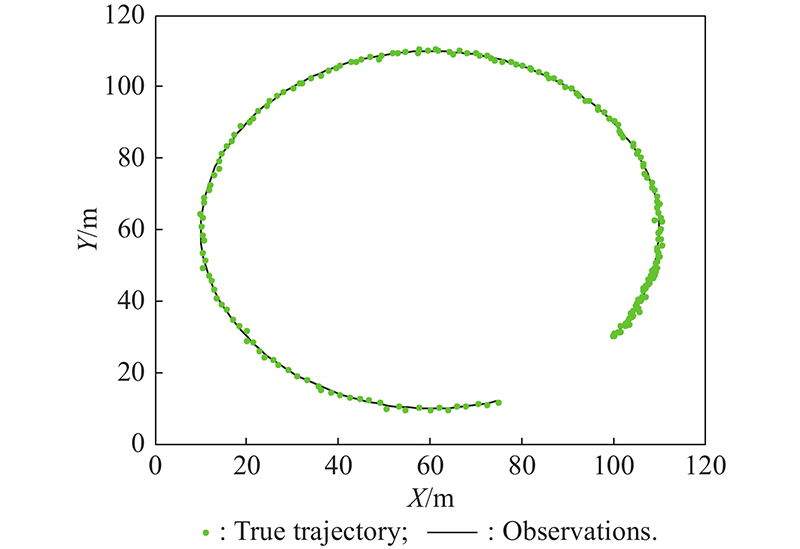
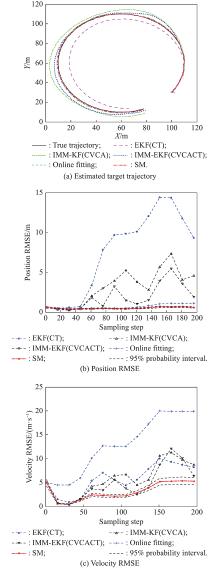
Fig 4
Target trajectory and RMSEs of state estimates and 95% probability interval"
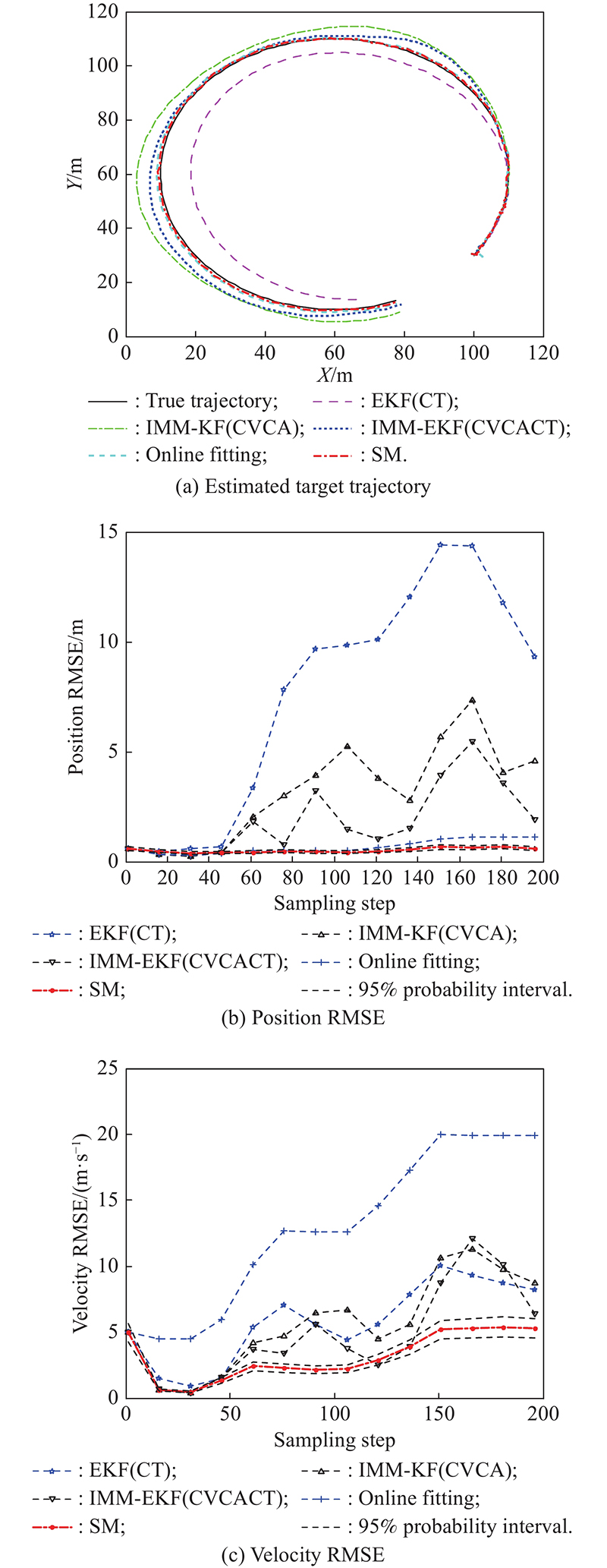
Fig 5
Target trajectories and position RMSEs and 95% probability interval corresponding to window length 14 and 16"
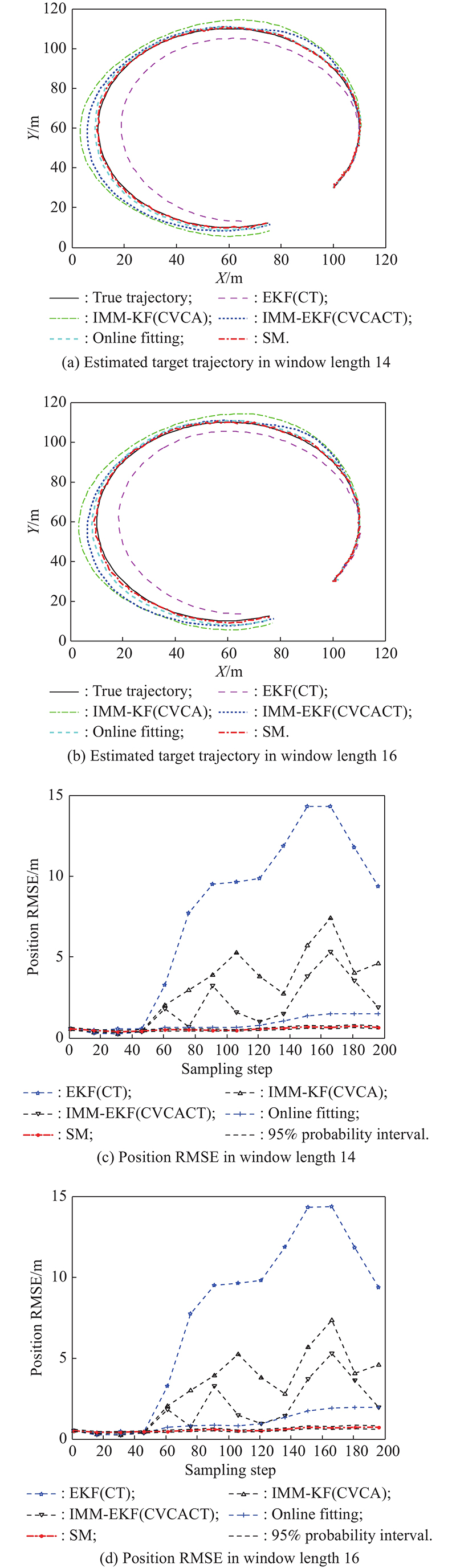
Fig 6
Target trajectory in curve Scenario I"
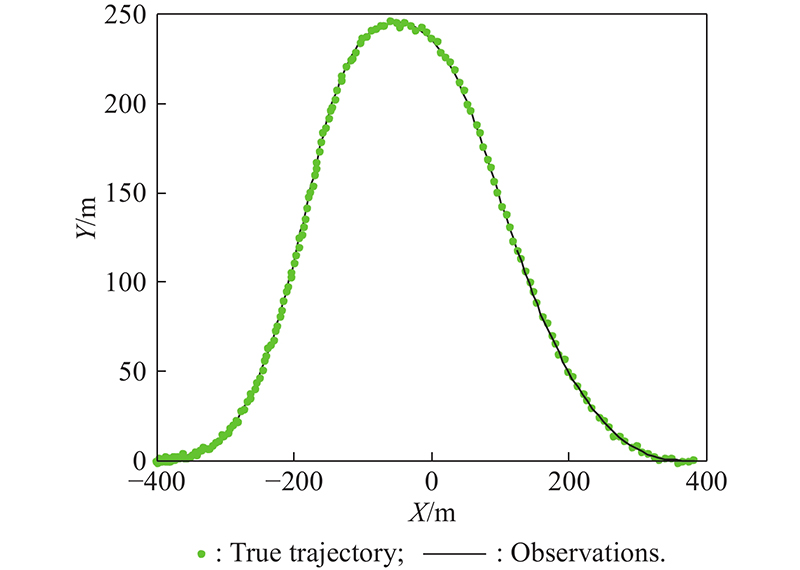
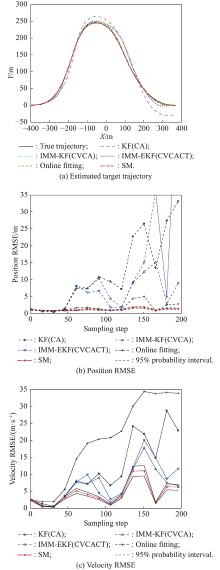
Fig 7
Target trajectory and RMSEs of state estimates and 95% probability interval in curve Scenario I"
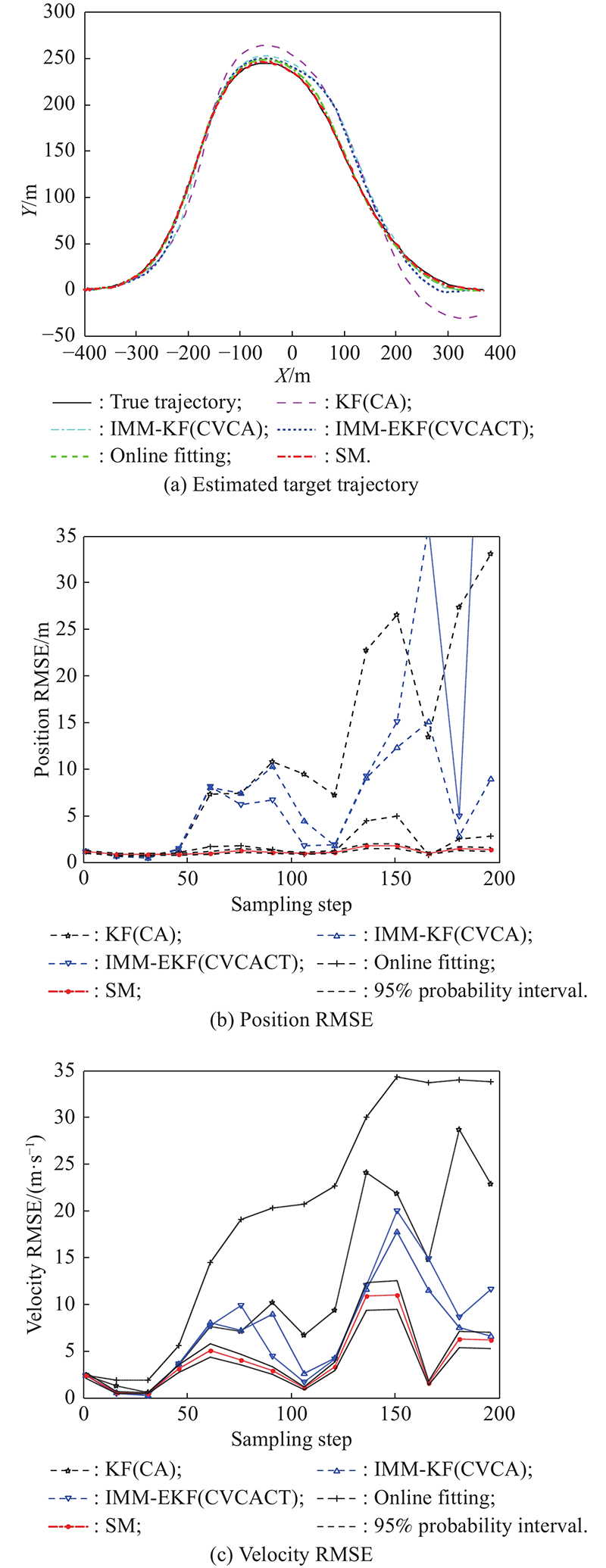
Fig 8
Target trajectory in curve Scenario II"
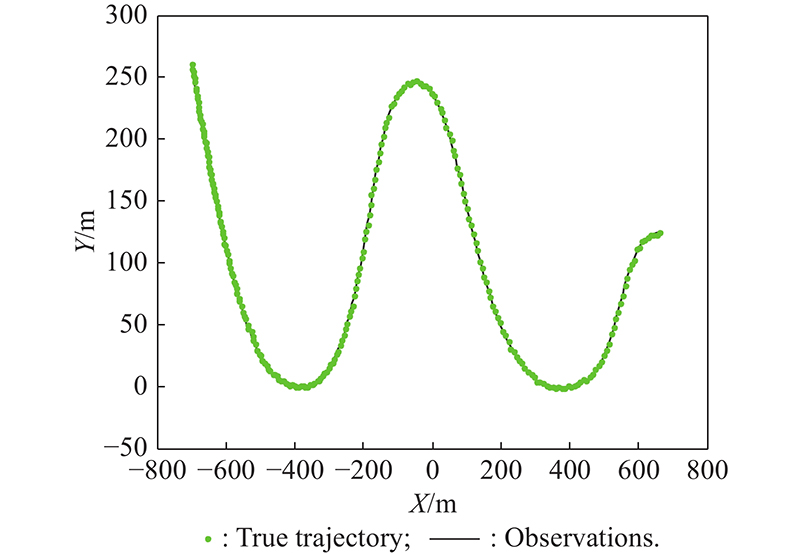

Fig 9
Target trajectories and position RMSEs and 95% probability interval corresponding to window length 10, 12, and 14"
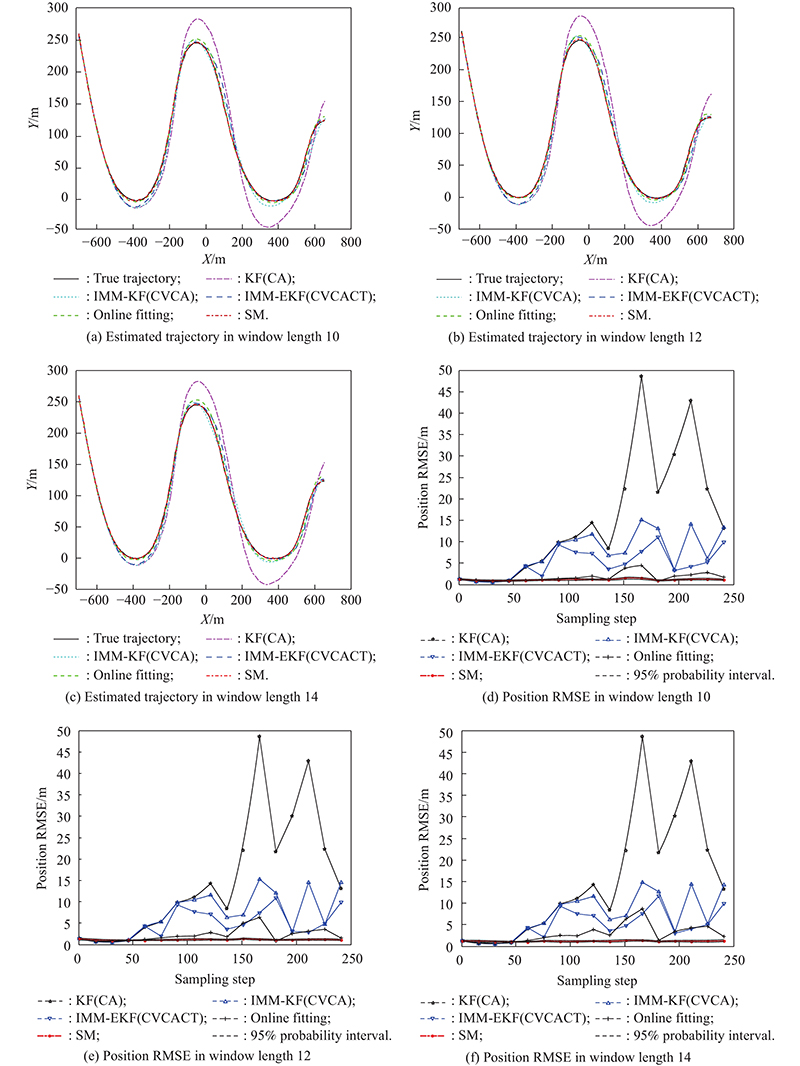
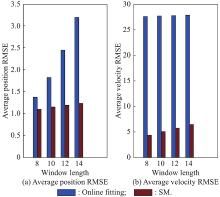
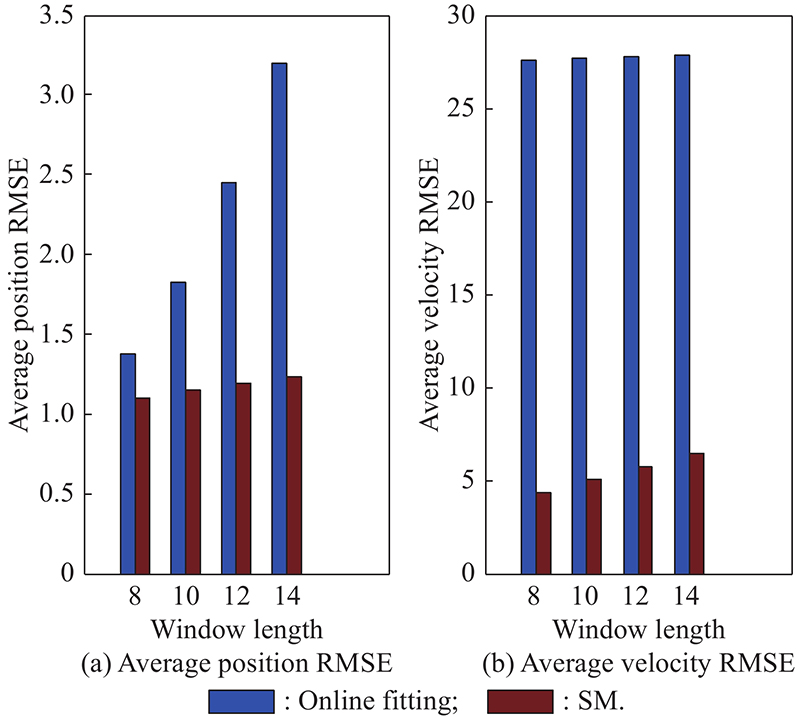
Fig 10
Histogram of average RMSEs of position and velocity of the online fitting and the proposed SM-based algorithms in curve Scenario II"
| 1 |
KIRUBARAIAN T, BAR-SHALOM Y, PATTIPATI K, et al Ground target tracking with variable structure IMM estimator. IEEE Trans. on Aerospace and Electronic Systems, 2000, 36 (1): 26- 46.
doi: 10.1109/7.826310 |
| 2 | ZHAO J, ZHOU R, JIN X L Progress in reentry trajectory planning for hypersonic vehicle. Journal of Systems Engineering and Electronics, 2014, 25 (4): 101- 113. |
| 3 | SIMON D. Optimal state estimation: Kalman, H infinity, and nonlinear approaches. New York: John Wiley & Sons, 2006. |
| 4 | BAR-SHALOM Y, LI X R, KIRUBARAIAN T. Estimation with applications to tracking and navigation: theory, algorithms, and software. New York: Wiley, 2001. |
| 5 | ZHANG, Z B, JI H B, YANG J Autonomous optical navigation of Mars probe aided by one-way Doppler measurements in capture stage. Journal of Systems Engineering and Electronics, 2020, 31 (3): 160- 169. |
| 6 |
LI X R, JILKOV V P Survey of maneuvering target tracking. Part I: dynamic models. IEEE Trans. on Aerospace and Electronic Systems, 2003, 39 (4): 1333- 1364.
doi: 10.1109/TAES.2003.1261132 |
| 7 |
LI X R, JILKOV V P Survey of maneuvering target tracking. Part V: multiple-model methods. IEEE Trans. on Aerospace and Electronic Systems, 2005, 41 (4): 1255- 1321.
doi: 10.1109/TAES.2005.1561886 |
| 8 | LI X R, JILKOV V P A survey of maneuvering target tracking. Part IV: decision-based methods. Proc. of SPIE- the International Society for Optical Engineering, 2002, 511- 534. |
| 9 | HARTIKAINEN J, SOLIN A, SARKKA S. Optimal filtering with Kalman filters and smoothers: a manual for the Matlab toolbox EKF/UKF. https://www.researchgate.net/publication/228683456. |
| 10 | LI X R Multiple-model estimation with variable structure. Part II: model-set adaptation. IEEE Trans. on Automatic Control, 2000, 45 (11): 2047- 2060. |
| 11 |
LI X R, ZHAO Z L, LI X B General model-set design methods for multiple-model approach. IEEE Trans. on Automatic Control, 2005, 50 (9): 1260- 1276.
doi: 10.1109/TAC.2005.854581 |
| 12 |
LI X R, BAR-SHALOM Y Design of an interacting multiple model algorithm for air traffic control tracking. IEEE Trans. on Control Systems Technology, 1993, 1 (3): 186- 194.
doi: 10.1109/87.251886 |
| 13 |
ZDZISLAW K, MIROSLAW S Soft- and hard-decision multiple-model estimators for air traffic control. IEEE Trans. on Aerospace and Electronic Systems, 2010, 46 (4): 2056- 2065.
doi: 10.1109/TAES.2010.5595615 |
| 14 | SINGER R A Estimating optimal tracking filter performance for manned maneuvering targets. IEEE Trans. on Aerospace and Electronic Systems, 1970, 6 (4): 473- 483. |
| 15 |
ZHOU H, KUMAR K S P A current statistical model and adaptive algorithm for estimating maneuvering targets. Journal of Guidance, Control, and Dynamics, 1984, 7 (5): 596- 602.
doi: 10.2514/3.19900 |
| 16 | QIAN X D, WANG B S. A motion model for tracking highly maneuvering targets. Proc. of the IEEE Radar Conference, 2002. DOI: 10.1109/NRC.2002.999767. |
| 17 |
SONG D, THARMARASA R, ZHOU G J, et al Multi-vehicle tracking using microscopic traffic models. IEEE Trans. on Intelligent Transportation Systems, 2019, 20 (1): 149- 161.
doi: 10.1109/TITS.2018.2804894 |
| 18 |
JO K, LEE M, KIM J, et al Tracking and behavior reasoning of moving vehicles based on roadway geometry constraints. IEEE Trans. on Intelligent Transportation Systems, 2017, 18 (2): 460- 476.
doi: 10.1109/TITS.2016.2605163 |
| 19 |
JO K, LEE M, SUNWOO M Track fusion and behavioral reasoning for moving vehicles based on curvilinear coordinates of roadway geometries. IEEE Trans. on Intelligent Transportation Systems, 2018, 19 (9): 3068- 3074.
doi: 10.1109/TITS.2017.2759904 |
| 20 | YANG C, BAKICH M, BLASCH E Nonlinear constrained tracking of targets on roads. Proc. of the 8th International Conference on Information Fusion, 2005, 235- 242. |
| 21 |
CHEN Y S, JILKOV V, LI X R Multilane-road target tracking using radar and image sensors. IEEE Trans. on Aerospace and Electronic Systems, 2015, 51 (1): 65- 80.
doi: 10.1109/TAES.2014.120766 |
| 22 | ULMKE M Improved GMTI-tracking using road-maps and topographic information. Proc. of SPIE-the International Society for Optical Engineering, 2003, 143- 154. |
| 23 |
ULMKE M, KOCH W Road-map assisted ground moving target tracking. IEEE Trans. on Aerospace and Electronic Systems, 2006, 42 (4): 1264- 1274.
doi: 10.1109/TAES.2006.314571 |
| 24 | MERTENS M, ULMKE M Precision GMTI tracking using road constraints with visibility information and a refined sensor model. Proc. of the IEEE Radar Conference, 2008, 1- 6. |
| 25 | KOCH W, KOLLER J, ULMKE M Ground target tracking and road map extraction. Journal of Photogrammetry and Remote Sensing, 2006, 61 (3): 197- 208. |
| 26 |
SONG D, THARMARASA R, KIRUBARAIAN T, et al Multi-vehicle tracking with road maps and car-following models. IEEE Trans. on Intelligent Transportation Systems, 2018, 19 (5): 1375- 1386.
doi: 10.1109/TITS.2017.2723575 |
| 27 |
TIAN Z, LI Y G, CEN M, et al Multi-vehicle tracking using an environment interaction potential force model. IEEE Sensors Journal, 2020, 20 (20): 12282- 12294.
doi: 10.1109/JSEN.2020.2999095 |
| 28 |
HASBERG C, HENSEL S, STILLER C Simultaneous localization and mapping for path-constrained motion. IEEE Trans. on Intelligent Transportation Systems, 2012, 13 (2): 541- 552.
doi: 10.1109/TITS.2011.2177522 |
| 29 | WANG H L, KEARNEY J, ATKINSON K Arc-length parameterized spline curves for real-time simulation. Proc. of the 5th Conference Curve and Surface Design, 2002, 387- 396. |
| 30 | LI T C, CHEN H M, SUN S D, et al. Joint smoothing, tracking, and forecasting based on continuous-time target trajectory fitting. IEEE Trans.on Automation Science and Engineering, 2017, 16(3): 1476−1483. |
| 31 | LI K Y, KIRUBARAIAN T, ZHOU G J. State estimation with implicit constraints of circular trajectory using pseudo-measurements. IEEE Trans. on Aerospace and Electronic Systems, 2020. DOI:10.1109/TAES.2020.2988894. |
| 32 |
ZHOU G J, LI K Y, KIRUBARAIAN T State estimation with trajectory shape constraints using pseudo-measurements. IEEE Trans. on Aerospace and Electronic Systems, 2019, 55 (5): 2395- 2407.
doi: 10.1109/TAES.2018.2887180 |
| 33 |
LIU C Y, SHUI P L, WEI G, et al Modified unscented Kalman filter using modified filter gain and variance scale factor for highly maneuvering target tracking. Journal of Systems Engineering and Electronics, 2014, 25 (3): 380- 385.
doi: 10.1109/JSEE.2014.00043 |
| 34 |
DENG F, CHEN J, CHEN C Adaptive unscented Kalman filter for parameter and state estimation of nonlinear high-speed objects. Journal of Systems Engineering and Electronics, 2013, 24 (4): 655- 665.
doi: 10.1109/JSEE.2013.00076 |
| 35 |
ARASARATNAM T, HAYKIN S Cubature Kalman filter. IEEE Trans. on Automatic Control, 2009, 54 (6): 1254- 1269.
doi: 10.1109/TAC.2009.2019800 |
| 36 |
NIE X, ZHANG F M Adaptive tracking algorithm based on 3D variable turn model. Journal of Systems Engineering and Electronics, 2017, 28 (5): 851- 860.
doi: 10.21629/JSEE.2017.05.04 |
| 37 |
JULIER S J A new method for nonlinear transformation of means and covariances in filters and estimates. IEEE Trans. on Automatic Control, 2000, 45 (3): 477- 482.
doi: 10.1109/9.847726 |
| 38 | WAN E A, VAN D M R The unscented Kalman filter for nonlinear estimation. Proc. of the IEEE Adaptive Systems for Signal Processing, Communication and Control Symposium, 2000, 153- 158. |
| [1] | Yuan ZENG, Wenbin LU, Bo YU, Shifei TAO, Haosu ZHOU, Yu CHEN. Improved IMM algorithm based on support vector regression for UAV tracking [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 867-876. |
| [2] | Zhichao BAO, Qiuxi JIANG, Fangzheng LIU. Multiple model efficient particle filter based track-before-detect for maneuvering weak targets [J]. Journal of Systems Engineering and Electronics, 2020, 31(4): 647-656. |
| [3] | Hongwei ZHANG, Weixin XIE. Constrained auxiliary particle filtering for bearings-only maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2019, 30(4): 684-695. |
| [4] | Mahmoudreza HADAEGH, Hamid KHALOOZADEH. Modified switched IMM estimator based on autoregressive extended Viterbi method for maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2018, 29(6): 1142-1157. |
| [5] | Xiaohua Nie and Fuming Zhang. Adaptive tracking algorithm based on 3D variable turn model [J]. Systems Engineering and Electronics, 2017, 28(5): 851-860. |
| [6] | Wei Yang, Yaowen Fu, and Xiang Li. Multiple-model Bayesian filtering with random finite set observation [J]. Journal of Systems Engineering and Electronics, 2012, 23(3): 364-371. |
| [7] | Liu Mei , Quan Taifan & Yao Tianbin. Tracking maneuvering target based on neural fuzzy network with incremental neural leaning* [J]. Journal of Systems Engineering and Electronics, 2006, 17(2): 343-349. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||