
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (6): 1294-1308.doi: 10.23919/JSEE.2022.000149
• CONTROL THEORY AND APPLICATION • Previous Articles
Chengming ZHANG( ), Yanwei ZHU(), Leping YANG(), Xin ZENG()
), Yanwei ZHU(), Leping YANG(), Xin ZENG()
Received:2021-04-25
Online:2022-12-18
Published:2022-12-24
Contact:
Yanwei ZHU
E-mail:zhchm_vincent@163.com;zywnudt@163.com;ylpnudt@163.com;xzavier0214@outlook.com
About author:Supported by:Chengming ZHANG, Yanwei ZHU, Leping YANG, Xin ZENG. An optimal guidance method for free-time orbital pursuit-evasion game[J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1294-1308.
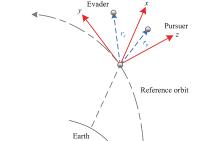
Fig 1
LVLH coordinate system and two spacecraft"
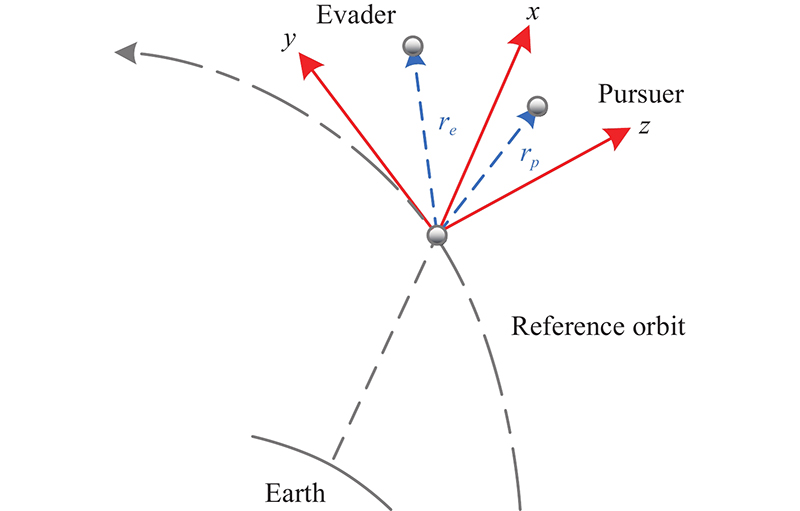

Fig 2
Thrust and control variables"
Fig 3
Original and new solution space of costates"
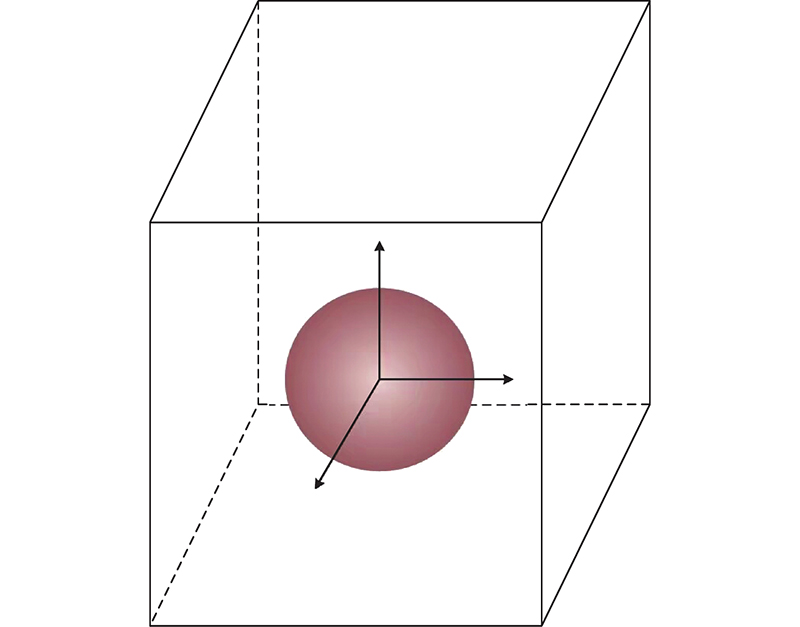

Fig 4
The interactive structure"
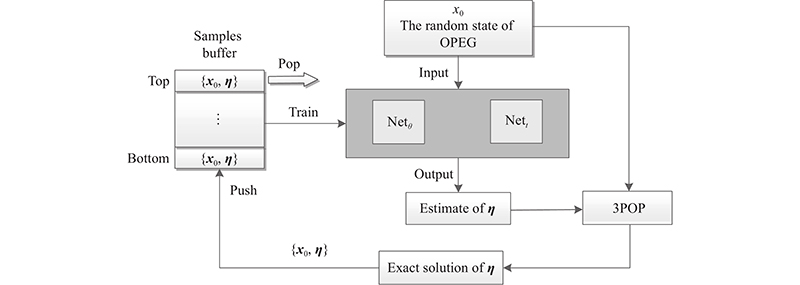
Table 1
The problem space S"
| Bound | a /km | d /km |
| Lower bound | Re + 36500 | 1 |
| Upper bound | Re + 36600 | 10 |
Table 2
Normalization coefficients"
| Coefficient | Value |
| DU/m | 2 000 |
| TU/s | 400 |
| VU/(m/s) | 5 |
Table 3
The size of hidden layers"
| Layer | Unit |
| 3 | 16, 32, 16 |
| 5 | 16, 32, 64, 32, 16 |
| 7 | 16, 32, 64, 128, 64, 32, 16 |
| 9 | 16, 32, 64, 128, 256, 128, 64, 32, 16 |
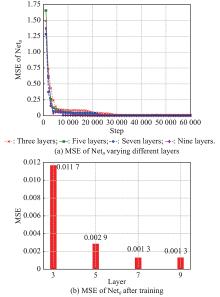
Fig 5
MSE of Netθ"
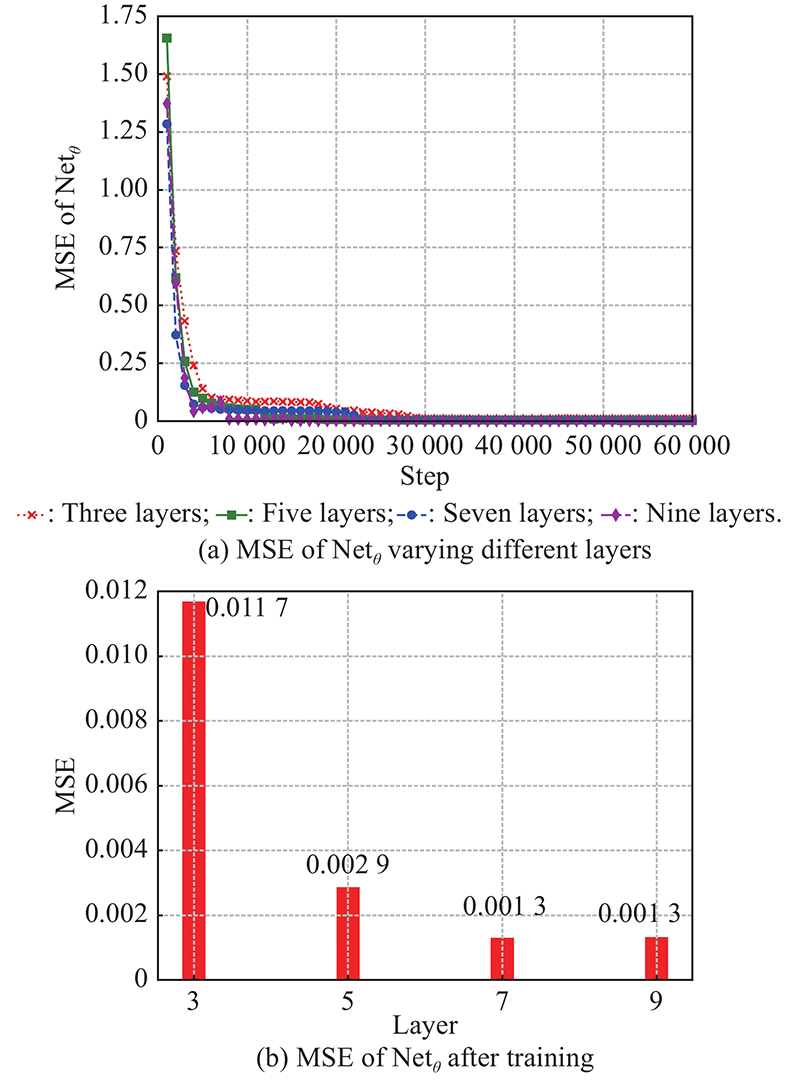
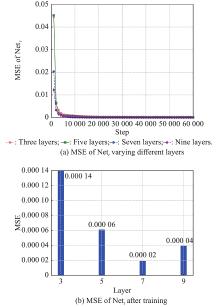
Fig 6
MSE of Nett"
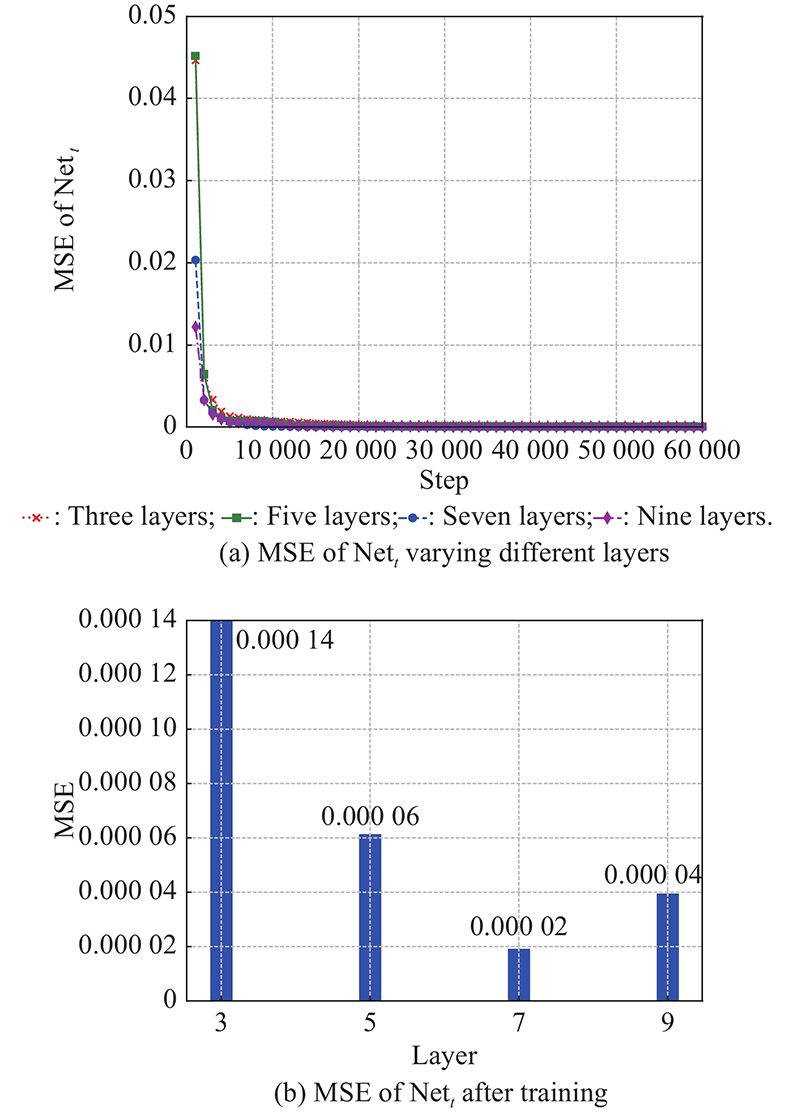
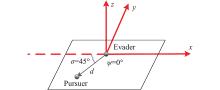
Fig 7
The position of players in Case 1"
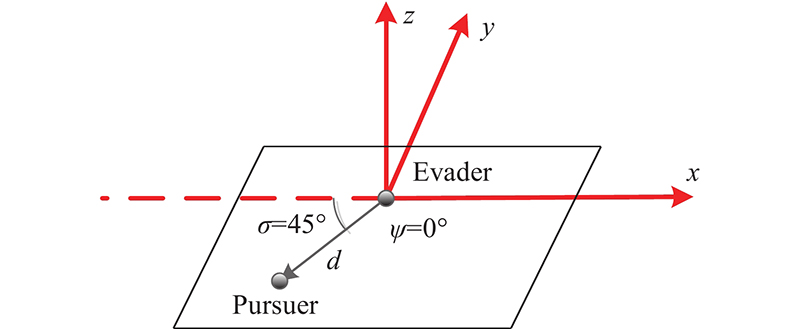
Fig 8
Trajectory results in Case 1"
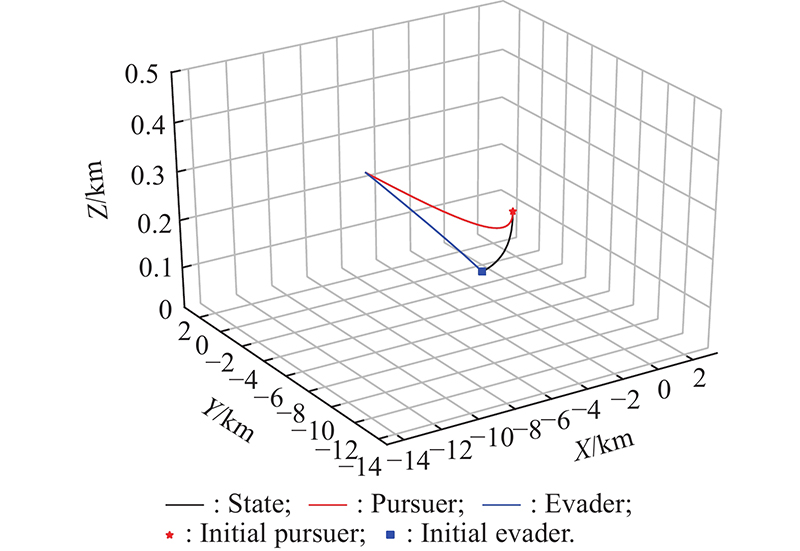
Fig 9
Miss distance results in Case 1"
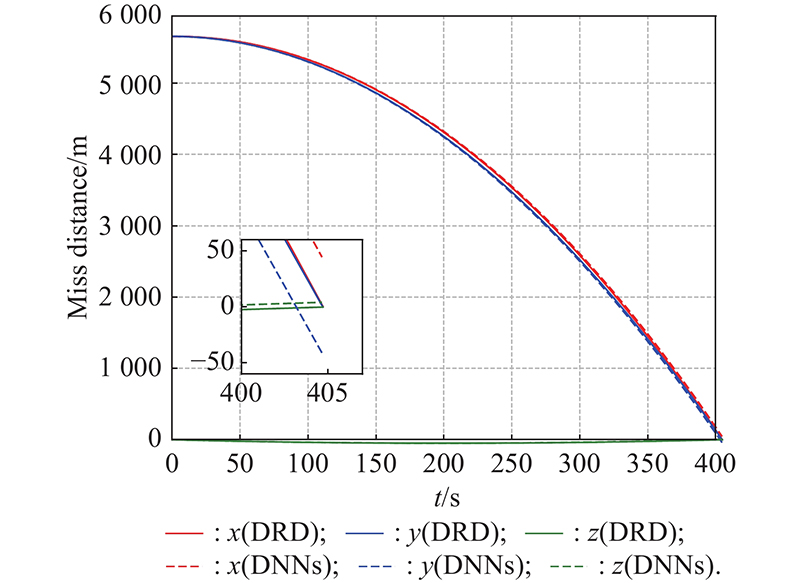
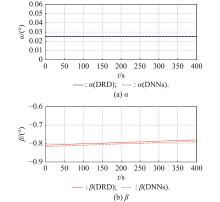
Fig 10
Control variable results in Case 1"
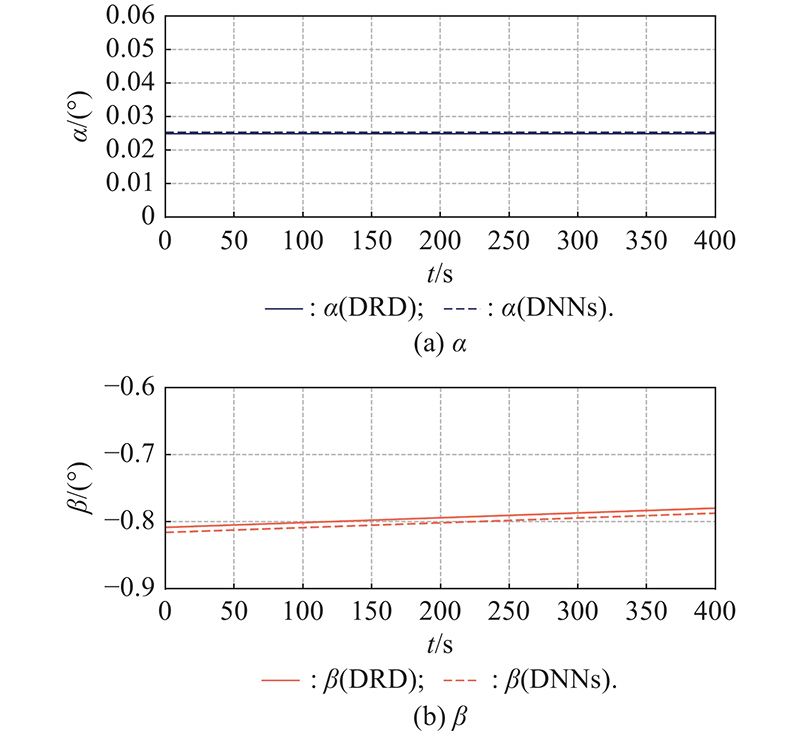
Table 4
Simulation result in Case 1"
| Result | DNNs | DRD |
| θ1 /rad | −0.0253 | −0.0248 |
| θ2 /rad | 0.7867 | 0.7792 |
| tf /s | 404.7246 | 404.7051 |
| rx /m | 44.50 | 0.57 |
| ry /m | −41.20 | −0.11 |
| rz /m | 4.13 | −0.09 |
| tc/ms | 203.125 | 525.625 |
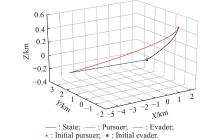
Fig 11
Trajectory results in Case 2"
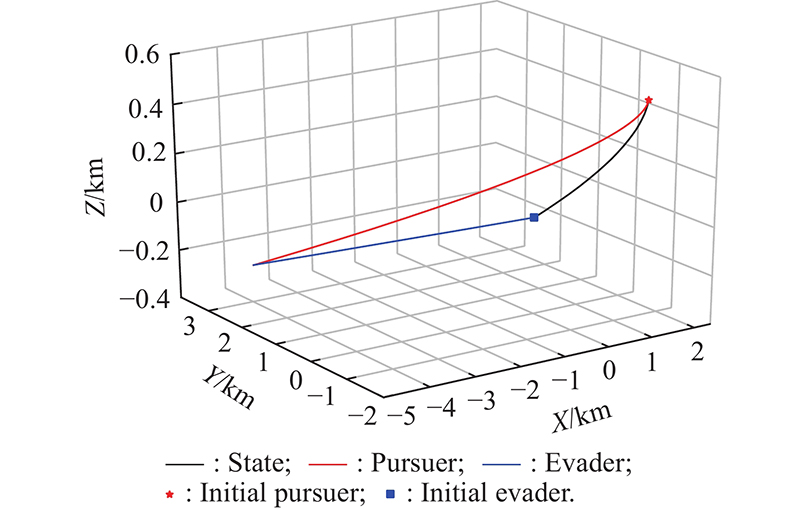
Fig 12
Miss distance results in Case 2"
Fig 13
Control variable results in Case 2"
Table 5
Simulation result in Case 2"
| Result | DNNs | DRD |
| θ1 /rad | 0.0472 | 0.0470 |
| θ2 /rad | −0.6180 | −0.6236 |
| tf /s | 183.7244 | 183.8296 |
| rx /m | −4.1046 | 0.1955 |
| ry /m | −8.8362 | 0.1219 |
| rz /m | 0.6038 | −0.6262 |
| tc /ms | 245.151 | 527.248 |

Fig 14
Comparison of efficiency between three methods"
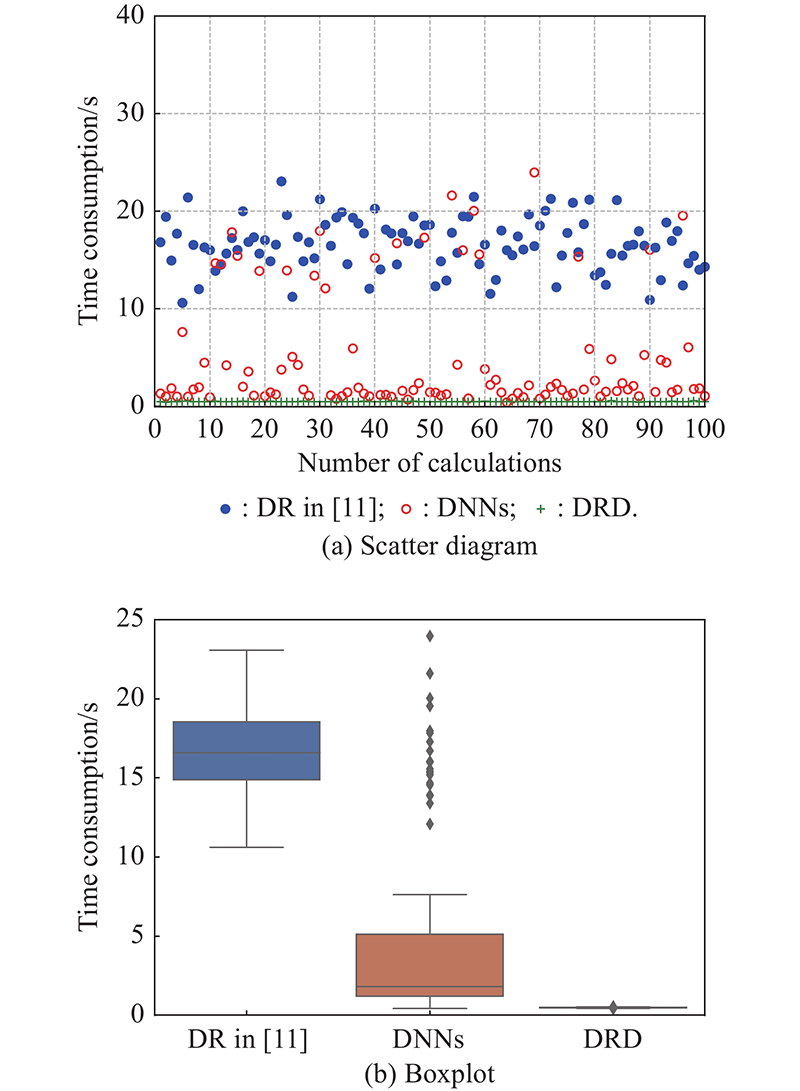
Table 6
Statistics of three methods s "
| Statistics | DRD | DNNs | DR in [ |
| μ | 0.4673 | 5.0134 | 16.6021 |
| σ | 0.0264 | 6.0634 | 2.6833 |
| max | 0.5469 | 23.9688 | 23.0562 |
| min | 0.3906 | 0.4188 | 10.6062 |
Table 7
Dispersion in Monte Carlo simulation"
| State | Real value | σ |
| rx /m | −3292.165 | 32.922 |
| ry /m | 3253.993 | 32.540 |
| rz /m | 3990.389 | 39.904 |
| vx /(m/s) | 8.897 | 0.089 |
| vy /(m/s) | 7.506 | 0.075 |
| vz /(m/s) | 9.964 | 0.100 |
| n /s−1 | 7.158×10−5 | 0.007×10−5 |
Fig 15
Trajectories in Monte Carlo"
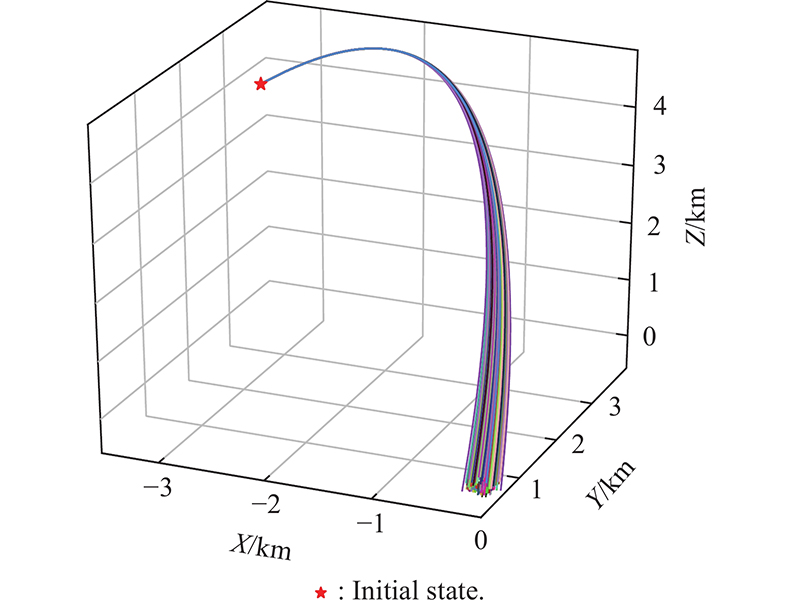

Fig 16
Miss distance results in Monte Carlo"
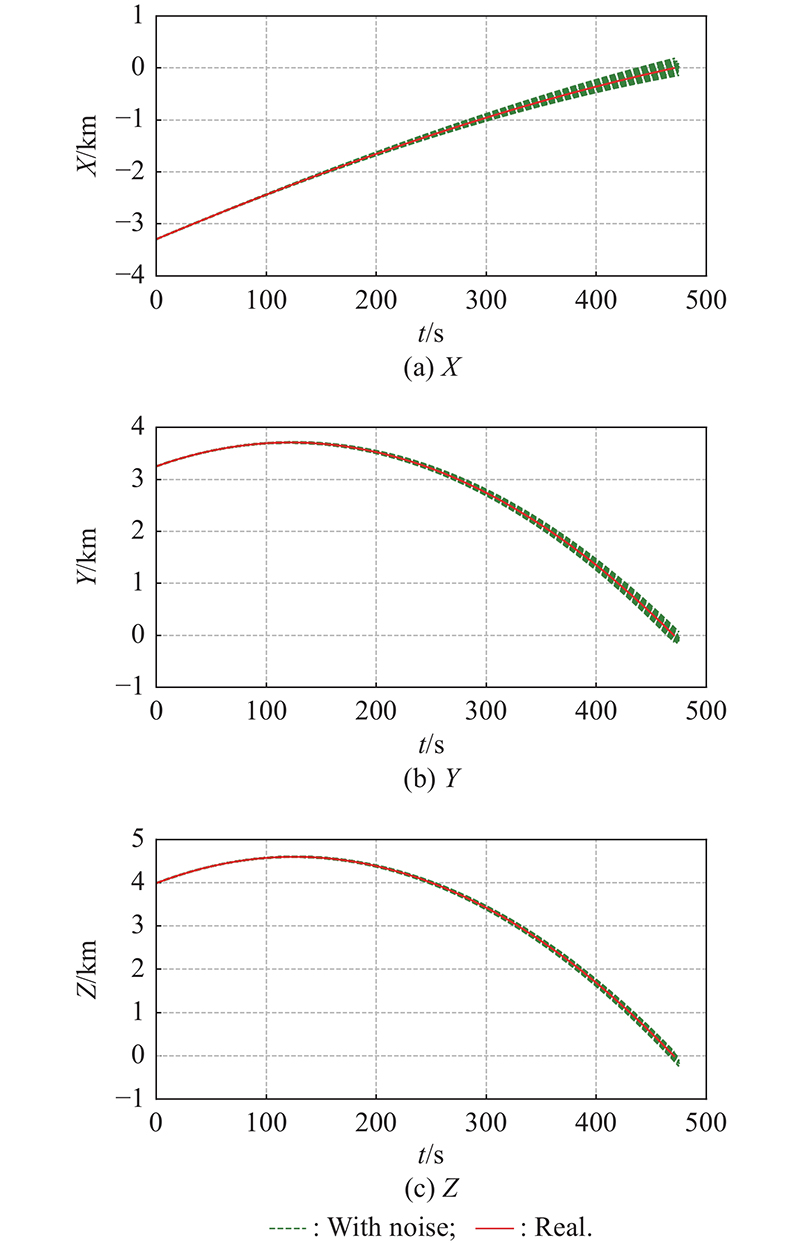

Fig 17
Control variable results in Monte Carlo"
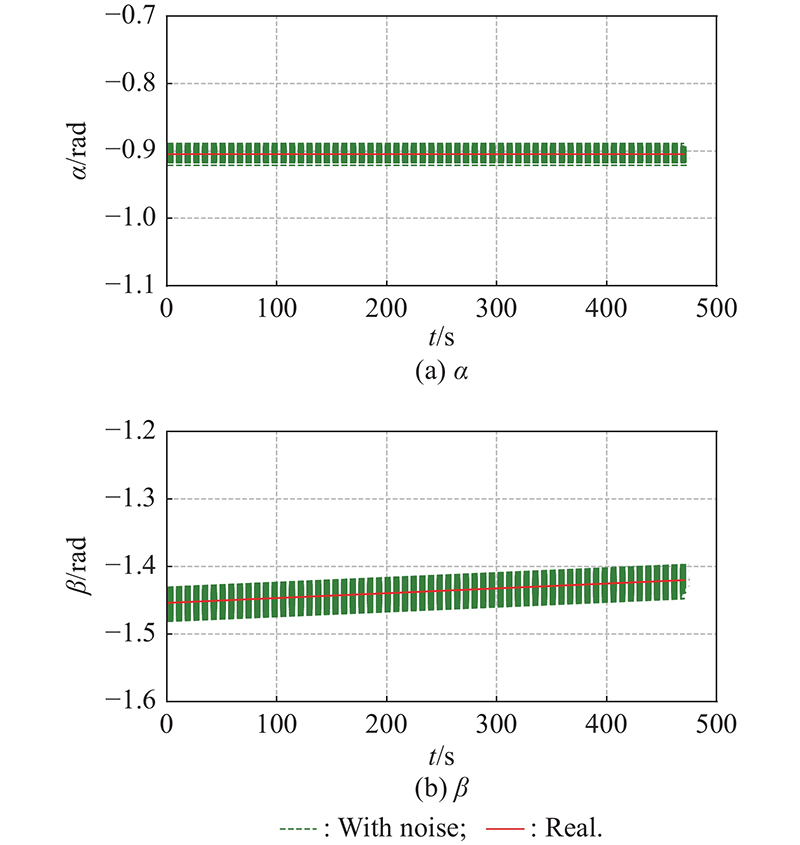
Table 8
Statistical result in terminal distance error m "
| Statistics | Δrx | Δry | Δrz |
| μ | 41.675 | 39.778 | 47.351 |
| σ | 31.388 | 28.834 | 35.812 |
| max | 187.835 | 151.409 | 237.766 |
| min | 0.112 | 0.017 | 0.020 |
Fig 18
Distribution of θ1"
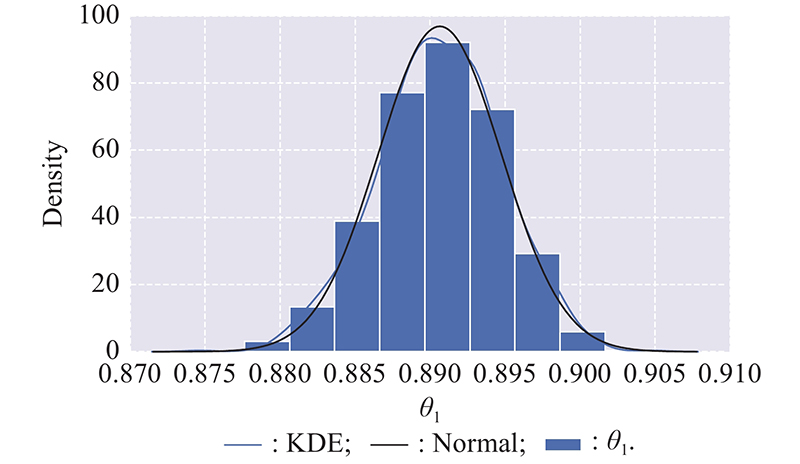
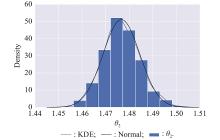
Fig 19
Distribution of θ2"
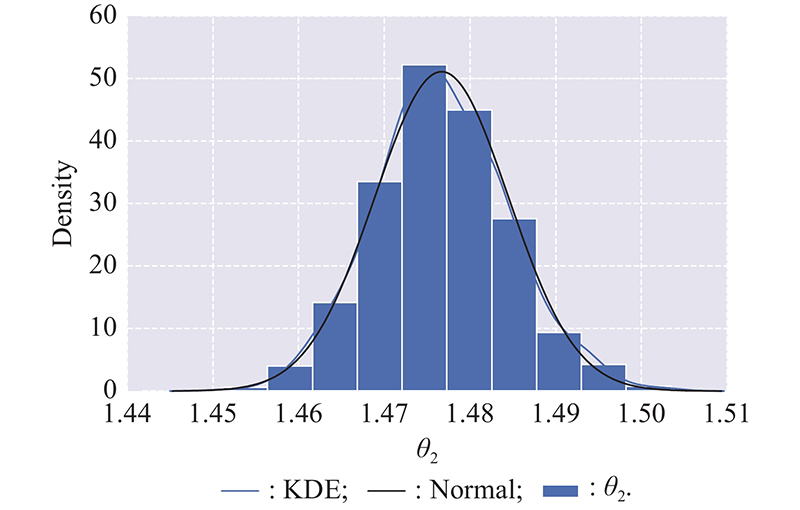
Fig 20
Distribution of tf"
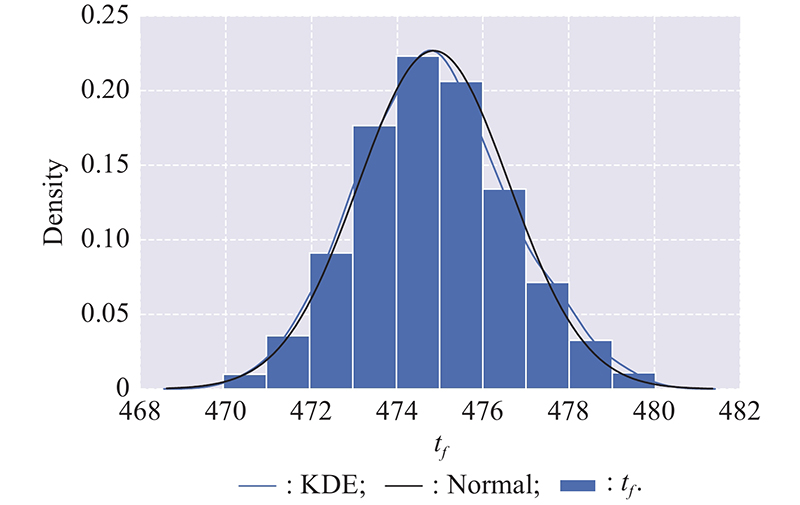
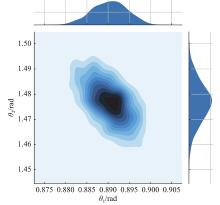
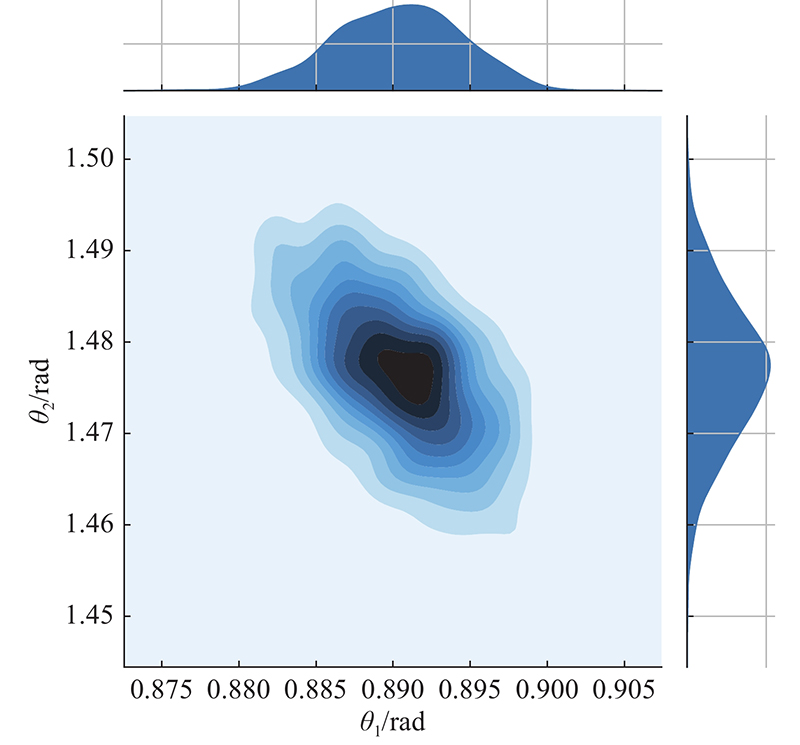
Fig 21
Joint distribution of θ1 and θ2"
| 1 | LUO Y Z, LI Z Y, ZHU H. Survey on spacecraft orbital pursuit-evasion differential games. Scientia Sinica Technologica, 2020, 50(12): 1533−1545. |
| 2 | ISAACS R. Differential games. New York: John Wiley & Sons, 1965. |
| 3 | RAIVIO T, EHTAMO H. Visual aircraft identification as a pursuit-evasion game. Journal of Guidance, Control, and Dynamics, 2000, 23(4): 701−708. |
| 4 |
SHIMA T Optimal cooperative pursuit and evasion strategies against a homing missile. Journal of Guidance, Control, and Dynamics, 2011, 34 (2): 414- 425.
doi: 10.2514/1.51765 |
| 5 |
PONTANI M, CONWAY B A Numerical solution of the threedimensional orbital pursuit-evasion game. Journal of Guidance, Control, and Dynamics, 2009, 32 (2): 474- 487.
doi: 10.2514/1.37962 |
| 6 | SUN S T. Two spacecraft pursuit-evasion strategies on low earth orbit and numerical solution. Harbin: Harbin Institute of Technology, 2015. (in Chinese) |
| 7 | YE D, SHI M M, SUN Z W. Satellite proximate pursuitevasion game with different thrust configurations. Aerospace Science and Technology, 2020, 99: 105715. |
| 8 | JAGAT A, SINCLAIR A J. Optimization of spacecraft pursuit-evasion game trajectories in the Euler-Hill reference frame. Proc. of the AIAA Guidance, Navigation, and Control Conference, 2014. DOI: 10.2514/6.2014-4131. |
| 9 | HAFER W T, REED H L, TURNER J D, et al. Sensitivity methods applied to orbital pursuit evasion. Journal of Guidance, Control, and Dynamics, 2015, 38(6): 1118−1126. |
| 10 | STUPIK J, PONTANI M, CONWAY B A. Optimal pursuit/evasion spacecraft trajectories in the hill reference frame. Proc. of the AIAA Guidance, Navigation, and Control Conference, 2012. DOI: 10.2514/6.2012-4882. |
| 11 | LI Z Y, ZHU H, LUO Y Z. A dimensionreduction solution of freetime differential games for spacecraft pursuitevasion. Acta Astronautica, 2019, 163: 201−210. |
| 12 |
YIN S S, LI J, CHENG L Low-thrust spacecraft trajectory optimization via a DNN-based method. Advances in Space Research, 2020, 66 (7): 1635- 1646.
doi: 10.1016/j.asr.2020.05.046 |
| 13 | CHENG L, WANG Z B, JIANG F H, et al. Fast generation of optimal asteroid landing trajectories using deep neural networks. IEEE Trans. on Aerospace and Electronic Systems, 2020, 56(4): 2642−2655. |
| 14 | WU Q C, LI B, LI J, et al Solution of infinite time domain spacecraft pursuit strategy based on deep neural network. Aerospace Control, 2019, 37 (6): 13- 18. |
| 15 |
LI Z Y, ZHU H, LUO Y Z Saddle point of orbital pursuit-evasion game under j2-perturbed dynamics. Journal of Guidance, Control, and Dynamics, 2020, 43 (9): 1733- 1739.
doi: 10.2514/1.G004459 |
| 16 | BASER T, OLSDER G J. Dynamic noncooperative game theory. Philadelphia: Society for Industrial and Applied Mathematics, 1999. |
| 17 |
JIANG F H, BAOYIN H X, LI J F Practical techniques for lowthrust trajectory optimization with homotopic approach. Journal of Guidance, Control, and Dynamics, 2012, 35 (1): 245- 258.
doi: 10.2514/1.52476 |
| 18 | HOWARD D C. Orbital mechanics for engineering students. 2nd ed. Amsterdam: Elsevier, 2010. |
| 19 | CHENG L, WANG Z B, JIANG F H, et al. Real-time optimal control for spacecraft orbit transfer via multi-scale deep neural networks. IEEE Trans. on Aerospace and Electronic Systems, 2019, 55(5): 2436−2450. |
| 20 | CHENG L, JIANG F H, LI J F. A review on the applications of deep learning in aircraft dynamics and control. Mechanics in Engineering, 2020, 42(3): 267−276. |
| 21 | RUNARSSON T P, YAO X Search biases in constrained evolutionary optimization. IEEE Trans. on Systems, Man, and Cybernetics, Part C: Applications and Reviews, 2005, 35 (2): 233- 243. |
| 22 | VENIGALLA, SCHEERES D J. Spacecraft rendezvous and pursuit/evasion analysis using reachable sets. Proc. of the Space Flight Mechanics Meeting, 2018. DOI: 10.2514/6.2018-0219. |
| [1] | Fuyunxiang YANG, Leping YANG, Yanwei ZHU, Xin ZENG. A DNN based trajectory optimization method for intercepting non-cooperative maneuvering spacecraft [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 438-446. |
| [2] | Qilong SUN, Naiming QI, Longxu XIAO, Haiqi LIN. Differential game strategy in three-player evasion and pursuit scenarios [J]. Journal of Systems Engineering and Electronics, 2018, 29(2): 352-366. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||