
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (3): 814-824.doi: 10.23919/JSEE.2025.000066
• CONTROL THEORY AND APPLICATION • Previous Articles
Haotian WU( ), Ruihang YU(), Juliang CAO(), Caixia MA(), Bainan YANG()
), Ruihang YU(), Juliang CAO(), Caixia MA(), Bainan YANG()
Received:2024-01-22
Online:2025-06-18
Published:2025-07-10
Contact:
Juliang CAO
E-mail:674911458@qq.com;yuruihang@nudt.edu.cn;cjvl@163.com;18772667402@163.com;yang_cs_bn@163.com
About author:Supported by:Haotian WU, Ruihang YU, Juliang CAO, Caixia MA, Bainan YANG. Field system-level calibration method for accelerometer considering nonlinear coefficients[J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 814-824.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Table 1
Orthogonal 22-position rotation path"
| Serial number | Stance/(°) | Serial number | Stance/(°) | |||||
| X | Y | Z | X | Y | Z | |||
| 1 | 0 | 0 | 0 | 12 | 90 | 270 | 0 | |
| 2 | 90 | 0 | 0 | 13 | 90 | 90 | 0 | |
| 3 | 270 | 0 | 0 | 14 | 90 | 0 | 0 | |
| 4 | 90 | 0 | 0 | 15 | 90 | −90 | 0 | |
| 5 | 0 | 0 | 0 | 16 | 180 | −90 | 0 | |
| 6 | 0 | 90 | 0 | 17 | 270 | −90 | 0 | |
| 7 | 0 | 270 | 0 | 18 | 360 | −90 | 0 | |
| 8 | 0 | 90 | 0 | 19 | 90 | 180 | 0 | |
| 9 | 0 | 0 | 0 | 20 | 180 | 180 | 0 | |
| 10 | 90 | 0 | 0 | 21 | 270 | 180 | 0 | |
| 11 | 90 | 90 | 0 | 22 | 360 | 180 | 0 | |
Table 2
Tilt 12-position rotation path"
| Serial number | Stance/(°) | Serial number | Stance/(°) | |||||
| X | Y | Z | X | Y | Z | |||
| 1 | 45 | 0 | 0 | 7 | 0 | 225 | 0 | |
| 2 | 135 | 0 | 0 | 8 | 0 | 315 | 0 | |
| 3 | 225 | 0 | 0 | 9 | 90 | 45 | 0 | |
| 4 | 315 | 0 | 0 | 10 | 90 | 135 | 0 | |
| 5 | 0 | 45 | 0 | 11 | 90 | 225 | 0 | |
| 6 | 0 | 135 | 0 | 12 | 90 | 315 | 0 | |
Table 3
Rank of SOM"
| Serial number | Rank | Serial number | Rank | Serial number | Rank | ||
| 1 | 9 | 13 | 42 | 25 | 42 | ||
| 2 | 15 | 14 | 42 | 26 | 42 | ||
| 3 | 21 | 15 | 42 | 27 | 42 | ||
| 4 | 27 | 16 | 42 | 28 | 42 | ||
| 5 | 32 | 17 | 42 | 29 | 42 | ||
| 6 | 35 | 18 | 42 | 30 | 42 | ||
| 7 | 38 | 19 | 42 | 31 | 42 | ||
| 8 | 41 | 20 | 42 | 32 | 42 | ||
| 9 | 42 | 21 | 42 | 33 | 42 | ||
| 10 | 42 | 22 | 42 | 34 | 42 | ||
| 11 | 42 | 23 | 42 | − | − | ||
| 12 | 42 | 24 | 42 | − | − |
Table 4
Singular value and corresponding state combination"
| Singular value | Result | State combination |
| 314.84 | 0.99 | |
| 288.63 | 0.99 | |
| 284.14 | 0.99 | |
| 95.95 | 0.99 | |
| 95.94 | 0.77 | |
| 95.93 | −0.63 | |
| 95.83 | −0.99 | |
| 95.83 | −0.99 | |
| 95.83 | −0.99 | |
| 83.67 | −0.97 | |
| 83.40 | −0.44 | |
| 82.83 | 0.88 | |
| 60.25 | −0.89 | |
| 59.46 | 0.9 | |
| 47.59 | 0.97 | |
| 46.96 | − | |
| 45.28 | 0.22 | |
| 34.19 | 0.74 | |
| 33.80 | −0.23 | |
| 32.36 | −0.71 | |
| 31.69 | 0.67 | |
| 29.27 | 0.41 | |
| 27.53 | 0.98 | |
| 26.52 | −0.64 | |
| 25.46 | 0.19 0.3 | |
| 23.02 | 0.99 | |
| 5.83 | 0.88 | |
| 5.83 | 0.47 | |
| 5.83 | ||
| 3.87 | −0.45 | |
| 3.32 | −0.88 | |
| 3.23 | −0.99 |
Table 5
Results of scaling factor ppm"
| Coefficient | Truth | Result | Error |
| 10 | 9.98 | 0.02 | |
| 10 | 9.97 | 0.03 | |
| 10 | 9.61 | 0.39 |
Table 6
Results of installation error (″)"
| Coefficient | Truth | Result | Error |
| 20 | 20.02 | 0.02 | |
| 20 | 19.99 | 0.01 | |
| 20 | 20.02 | 0.02 |
Table 7
Results of bias calibration μg"
| Coefficient | Truth | Result | Error |
| 50 | 50.07 | 0.07 | |
| 50 | 49.91 | 0.09 | |
| 50 | 50.00 | 0 |
Table 8
Results of quadratic square term μg/g2"
| Coefficient | Truth | Result | Error |
| 20 | 19.92 | 0.08 | |
| 20 | 20.08 | 0.08 | |
| 20 | 19.61 | 0.39 |
Table 9
Results of cross-coupling term μg/g2"
| Coefficient | Truth | Result | Error |
| 10 | 10 | 0 | |
| 10 | 10 | 0 | |
| 10 | 10 | 0 | |
| 10 | 10 | 0 | |
| 10 | 10 | 0 | |
| 10 | 10 | 0 |

Fig 1
Calibration experimental system"
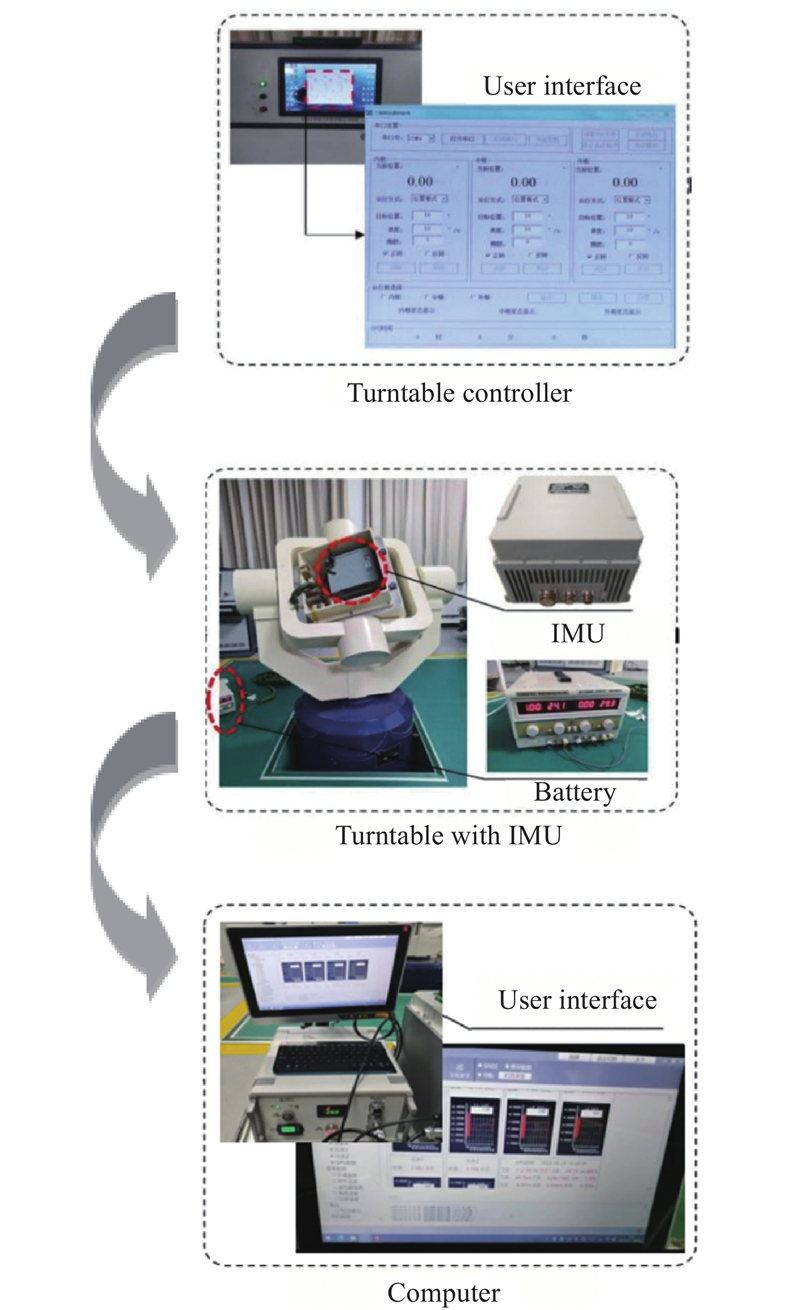
Table 10
Calibration results"
| Category | Coefficient | Result |
| Scale factor/ppm | 22.76 | |
| 27.67 | ||
| 29.81 | ||
| Installation error/(″) | −0.58 | |
| 5.03 | ||
| −1.26 | ||
| −3.70 | ||
| −1.62 | ||
| 1.37 | ||
| Bias/μg | 13.80 | |
| −33.85 | ||
| −5.22 | ||
| Quadratic square term/(μg/g2) | −16.70 | |
| −15.73 | ||
| 5.74 | ||
| Cross-coupling term/(μg/g2) | 25.18 | |
| −6.92 | ||
| −2.33 | ||
| 5.07 | ||
| 2.21 | ||
| −6.97 |
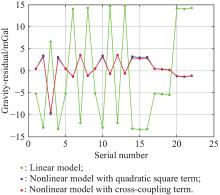
Fig 2
Comparison of gravity residuals of three models at orthogonal 22-position"
Table 11
Analysis of gravity residual in orthogonal position"
| Model number | Mean | MSD | RMS |
| 1 | 1.21 | 11.82 | 11.61 |
| 2 | 0.54 | 2.99 | 2.97 |
| 3 | 0.50 | 2.86 | 2.84 |
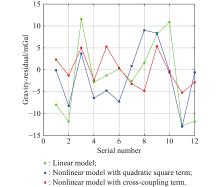
Fig 3
Comparison of gravity residuals of three models at tilt 12-position"
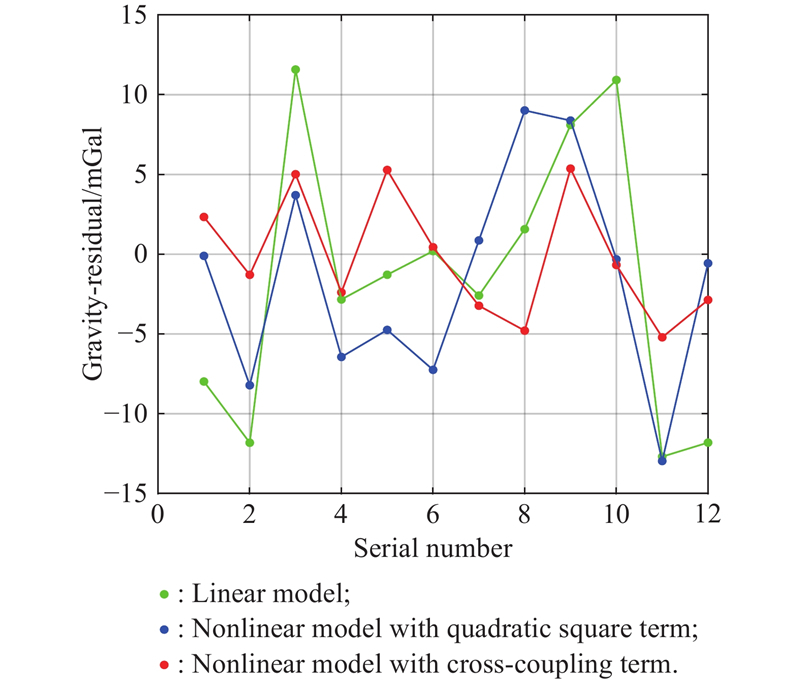
Table 12
Analysis of gravity residual in tilt positions"
| Model number | Mean | MSD | RMS |
| 1 | 1.55 | 8.60 | 8.38 |
| 2 | 1.55 | 6.67 | 6.57 |
| 3 | 0.17 | 3.86 | 3.70 |
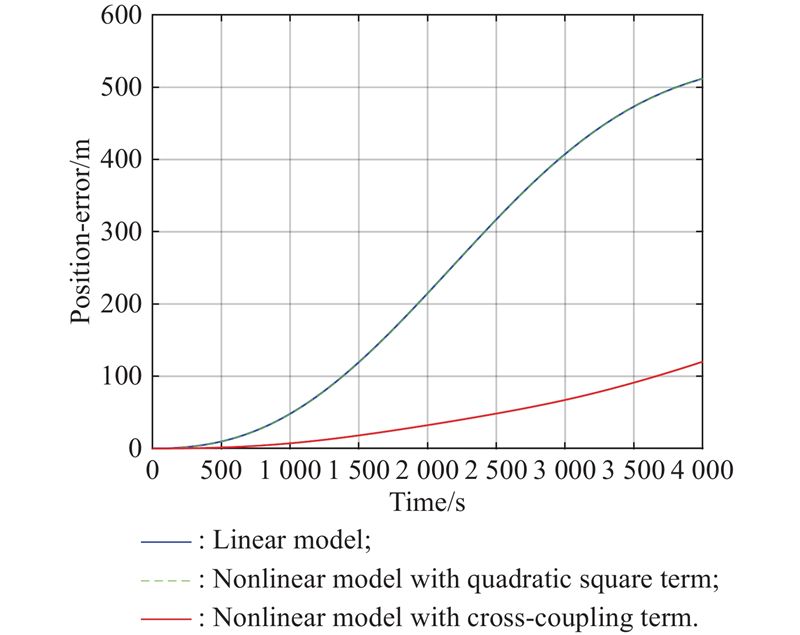
Fig 4
Position error after compensation"
| 1 | LIU F, HAN R F. Analysis on the influence of gravity field and geomagnetic field on the combat application of military weapons and equipment. Proc. of the 10th National Security Geophysics Symposium, 2014: 259−263. |
| 2 | DANG Y M, GUO C X, JIANG T, et al 2020 mount everest measurement and elevation determination. Journal of Geodesy and Geoinformation Science, 2021, 50 (4): 556- 561. |
| 3 | YU H L. Research on method for improving the accuracy of laser gyroscope strapdown inertial navigation system in vibration environment. Changsha: National University of Defense Technology, 2012. (in Chinese) |
| 4 | SUN C, REN S Q, CAO J, et al Symmetric calibration method of pendulous integrating gyroscopic accelerometer on centrifuge. Measurement, 2022, 200, 111658. |
| 5 | SU B K, LI D D. Optimal design of accelerometer precision centrifuge test. Journal of Chinese Inertial Technology, 2010, 18(5): 620−624. (in Chinese) |
| 6 | LIU K, YAO H Y, JIA Q P, et al Calibration method of triaxial silicon micro-resonant accelerometer based on precision centrifuge. Computer Engineering and Design, 2023, 44 (3): 945- 953. |
| 7 |
DONG X S, HUANG X L, DU G Z, et al Calibration method of accelerometer based on rotation principle using double turntable centrifuge. Micromachines, 2021, 13 (1): 62- 71.
doi: 10.3390/mi13010062 |
| 8 | CHEN X J, REN S H, LI W Calibration method for high-order error model coefficients of accelerometers. Chinese Journal of Inertial Technology, 2010, 18 (4): 508- 512. |
| 9 | XING H F. Research on the effect of precision centrifuge error on the calibration error of accelerometer. Harbin: Harbin Institute of Technology, 2009. (in Chinese) |
| 10 | LIU Y K, YU Z W, REN S Q On pseudo second-order term of pendulous integrating gyro accelerometer calibrated in dual-axis precision centrifuge. IEEE Trans. on Instrumentation and Measurement, 2023, 72 (3): 76- 83. |
| 11 | LU K W, WANG X L A high-precision accelerometer calibration method. Aero Weaponry, 2022, 29 (5): 88- 93. |
| 12 | SUN C, REN S Q, ZENG M, et al Sequential calibration method of nonlinear errors of PIGA on counter-rotating platform centrifuge. IEEE Trans. on Instrumentation and Measurement, 2021, 70, 1001811. |
| 13 | JIA J C, WANG M, LIU X, et al A system-level calibration method for nonlinear error of quartz flexible accelerometer. Journal of Chinese Inertial Technology, 2023, 31 (1): 67- 71, 79. |
| 14 | LI M Z. Combined calibration method of centrifuge accelerometer based on mode observation method. Tianjin: Tianjin University of Science and Technology, 2022. (in Chinese) |
| 15 |
REN S Q, LIU Q B Calibration method of accelerometer’s high-order error model coefficients on precision centrifuge. IEEE Trans. on Instrumentation and Measurement, 2020, 69 (5): 2277- 2286.
doi: 10.1109/TIM.2019.2923828 |
| 16 | SUN Y B, REN S Q, WANG C H Calibration method of quartz accelerometer under sinusoidal acceleration excitation. Journal of Chinese Inertial Technology, 2021, 29 (5): 688- 695. |
| 17 | ZHANG Z Y, LI J Research on a calibration method applicable to high-range accelerometers. Journal of Electronic Measurement and Instrumentation, 2021, 35 (12): 45- 51. |
| 18 | SUN C, REN S Q, CAO J W, et al Integral precession calibration method of PIGA on linear vibration table. Chinese Journal of Aeronautics, 2023, 37 (3): 219- 236. |
| 19 | LIU Q B, REN S Q, WANG C H Research on the calibration method of quadratic term error coefficients of liquid-floating gyroscope based on line shaker. Vibration and Shock, 2020, 39 (7): 216- 222. |
| 20 | HE D, YAN X J, ZHU J J A quadratic term separation method for gyroscopic accelerometers on an online vibration table. Sensors and Microsystems, 2020, 39 (10): 24- 26, 30. |
| 21 |
BATISTA P, SILVESTRE C, OLIVEIRA P, et al Accelerometer calibration and dynamic bias and gravity estimation: analysis, design, and experimental evaluation. IEEE Trans. on Control Systems Technology, 2011, 19 (5): 1128- 1137.
doi: 10.1109/TCST.2010.2076321 |
| 22 | GAO P Y, LI K, LIU Z J, et al. A self-calibration method for accelerometer nonlinearity errors in triaxis rotational inertial navigation system. IEEE Trans. on Instrumentation & Measurement, 2017, 66(2): 243−253. |
| 23 | XIE T Y, LU S H, CAO J L, et al Nonlinear parameter estimation and experimental verification of gravity sensor considering quadratic error parameters. Journal of Physics: Conference Series, 2021, 1865 (4): 742- 749. |
| 24 | YANG J, WU W Q, LIAN J X. Systematic calibration method for the nonlinear coefficients of triaxial accelerometers. Proc. of the 32nd China Control Conference, 2013: 5164−5171. |
| 25 |
HAN K J, SUNG C K, YU M J, et al Improved calibration method for SDINS considering body-frame drift: IJCAS. International Journal of Control, Automation, and Systems, 2011, 9 (3): 497- 505.
doi: 10.1007/s12555-011-0309-x |
| 26 | SONG T X, LI K, WU Q, et al An improved self-calibration method with consideration of inner lever-arm effects for a dual-axis rotational inertial navigation system. Measurement Science & Technology, 2020, 31 (7): 131- 141. |
| 27 | ZHAO G L, TAN M L, WU S Strapdown inertial navigation multi-location system-level calibration method based on matrix factorization. Chinese Journal of Sensors and Actuators, 2022, 35 (6): 725- 731. |
| 28 | MA C X. Research on field calibration methods of quartz flexible accelerometer for strapdown airborne gravimeter. Changsha: National University of Defense Technology, 2023. (in Chinese) |
| [1] | Hong Cai, Anliang Li, and Yuan Cao. New self-calibration schemes for accelerometers in platform INS [J]. Journal of Systems Engineering and Electronics, 2015, 26(5): 1032-1042. |
| [2] | He Jie, Huang Xianlin & Wang Guofeng. Design and application of single-antenna GPS/accelerometers attitude determination system [J]. Journal of Systems Engineering and Electronics, 2008, 19(2): 220-227. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||