
Journal of Systems Engineering and Electronics ›› 2025, Vol. 36 ›› Issue (3): 835-853.doi: 10.23919/JSEE.2025.000065
• CONTROL THEORY AND APPLICATION • Previous Articles
Ruitao ZHANG1,2,3( ), Yangwang FANG1,2,3,4(), Zhan CHEN1,2,3(), Hang GUO1,2,3,4,*(), Wenxing FU1,2,3,4()
), Yangwang FANG1,2,3,4(), Zhan CHEN1,2,3(), Hang GUO1,2,3,4,*(), Wenxing FU1,2,3,4()
Received:2024-04-07
Online:2025-06-18
Published:2025-07-10
Contact:
Hang GUO
E-mail:1476793301@qq.com;ywfang@nwpu.edu.cn;chenzhan@mail.nwpu.edu.cn;jsguoh@nwpu.edu.cn;wenxingfu@nwpu.edu.cn
About author:Supported by:Ruitao ZHANG, Yangwang FANG, Zhan CHEN, Hang GUO, Wenxing FU. Group cooperative midcourse guidance law design considering time-to-go[J]. Journal of Systems Engineering and Electronics, 2025, 36(3): 835-853.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Group cooperative attack schematic diagram"

Fig 2
LOS coordinate frame"

Fig 3
Diagram of the lead angle"
Table 1
Simulation initial conditions for missiles"
| Missile | Initial position | Initial velocity |
| Missile 1 | ||
| Missile 2 | ||
| Missile 3 | ||
| Missile 4 | ||
| Missile 5 | ||
| Missile 6 |
Table 2
Simulation initial conditions for targets"
| Target | Initial position | Initial velocity |
| Target 1 | ||
| Target 2 |
Fig 4
Network communication topology"
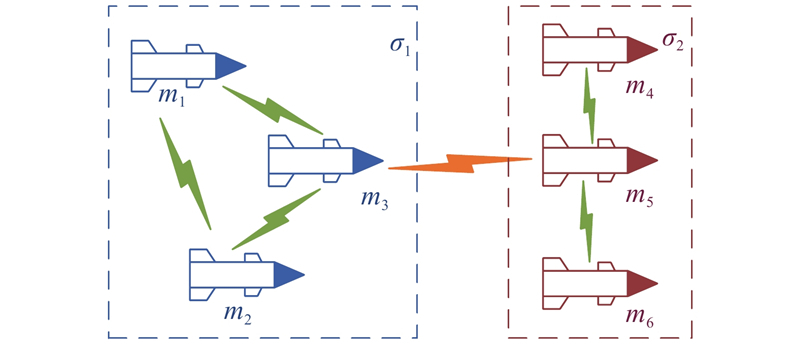
Fig 5
Trajectories of missiles and targets in Subsection 4.1.1"
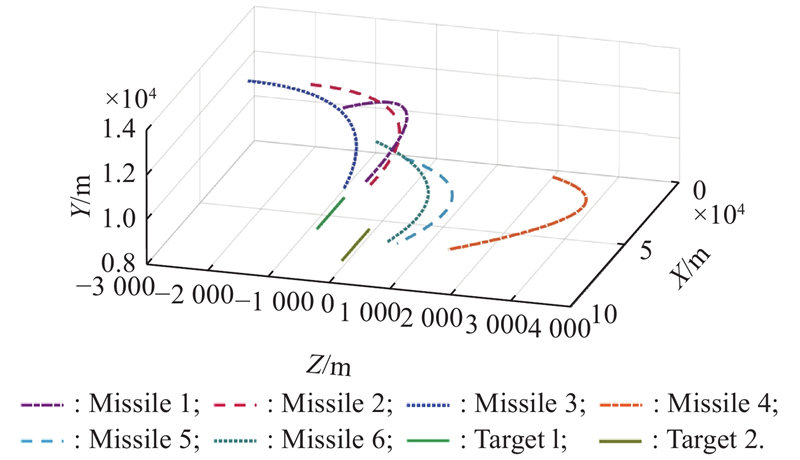
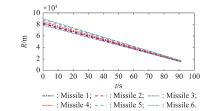
Fig 6
Relative distances between missiles and targets in Subsection 4.1.1"

Fig 7
Time-to-go of missiles in Subsection 4.1.1"
Fig 8
Actual and estimated accelerations of target 1 in Subsection 4.1.1"
Fig 9
Actual and estimated accelerations of target 2 in Subsection 4.1.1"
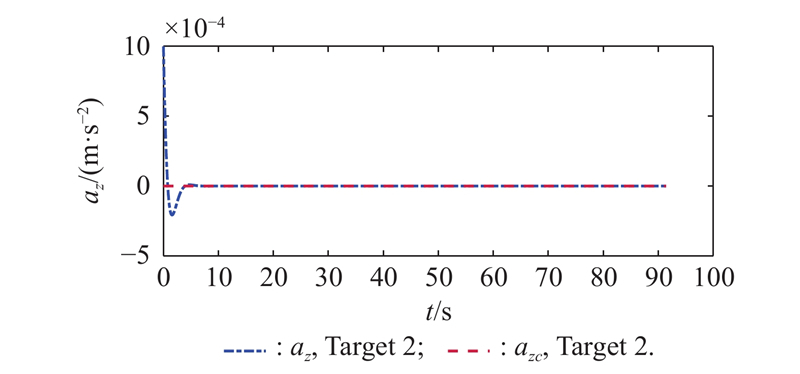
Fig 10
Component of the virtual collision point mean on the X-axis in Subsection 4.1.1"
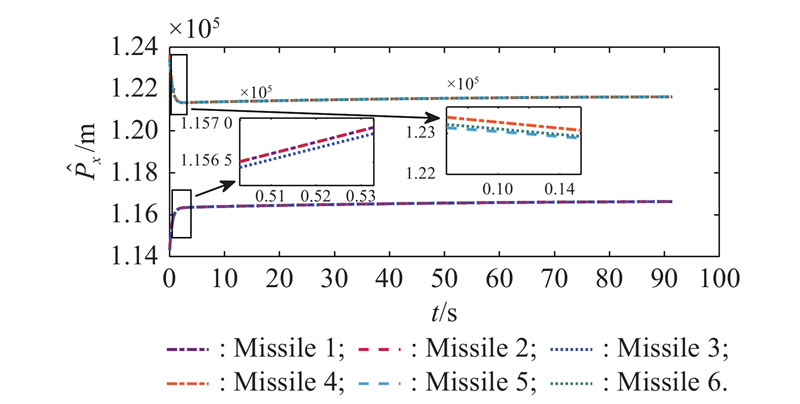
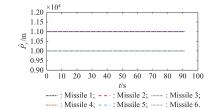
Fig 11
Component of the virtual collision point mean on the Y-axis in Subsection 4.1.1"
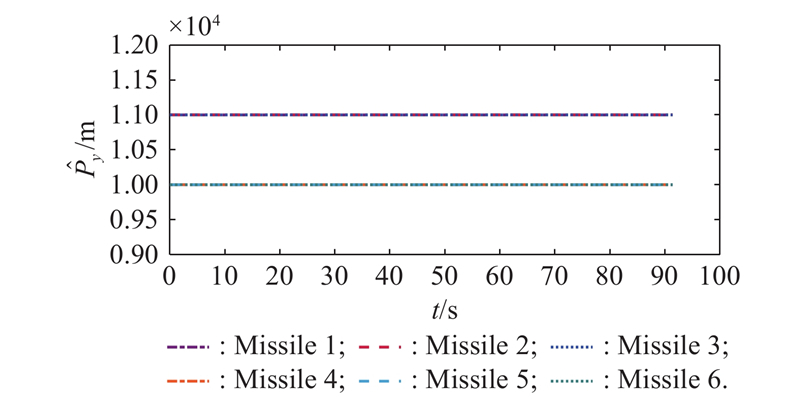
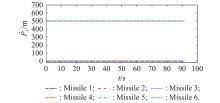
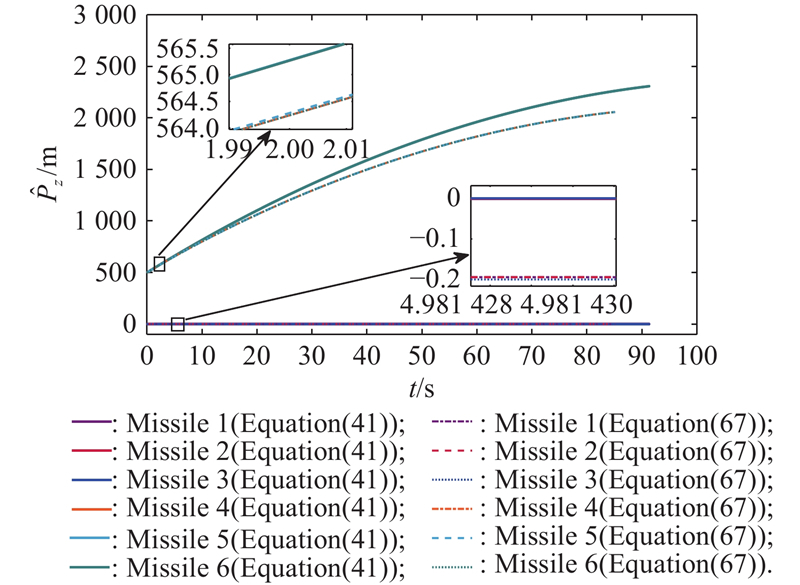
Fig 12
Component of the virtual collision point mean on the Z-axis in Subsection 4.1.1"
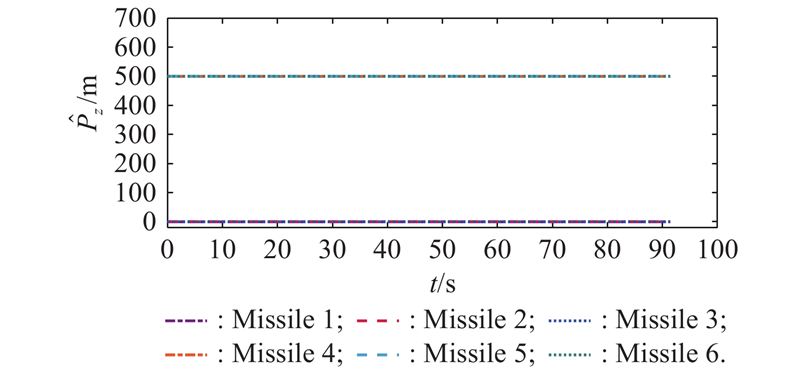
Fig 13
Accelerations of missiles in Subsection 4.1.1"
Fig 14
Lead angles of missiles in Subsection 4.1.1"
Fig 15
Trajectories of missiles and targets in Subsection 4.1.2"
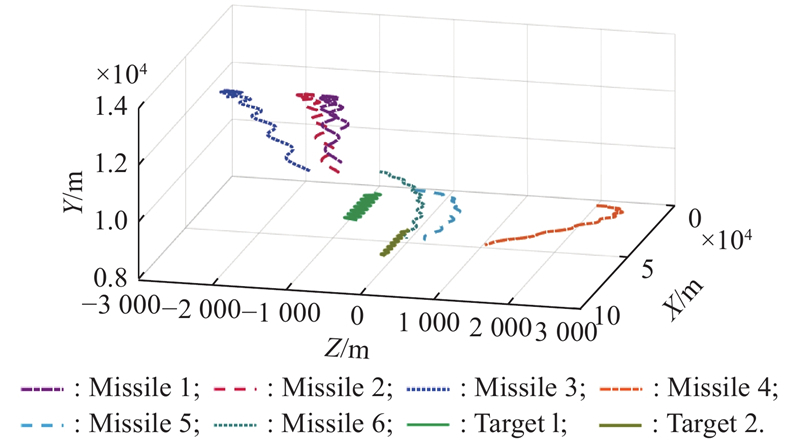
Fig 16
Relative distances between missiles and targets in Subsection 4.1.2"
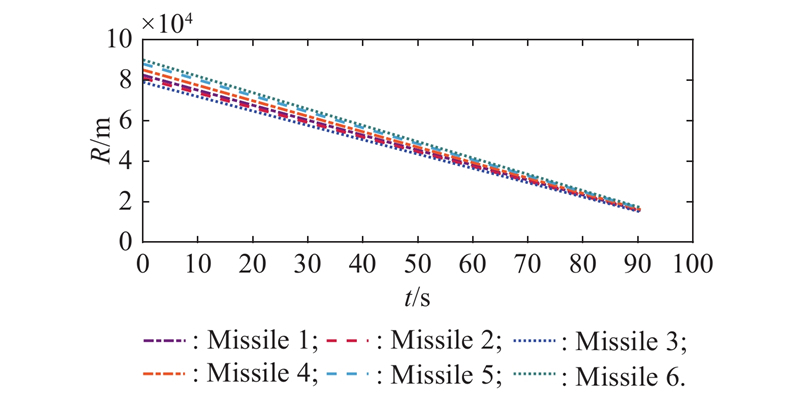
Fig 17
Time-to-go of missiles in Subsection 4.1.2"
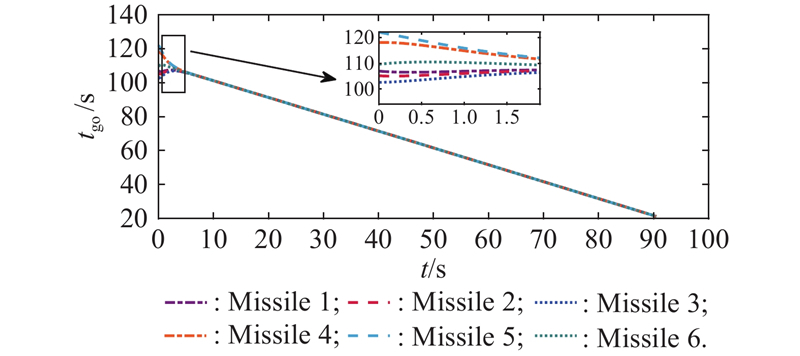
Fig 18
Actual and estimated accelerations of target 1 in Subsection 4.1.2"
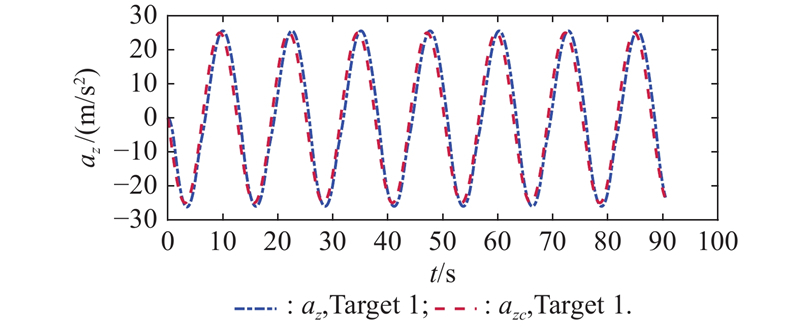
Fig 19
Actual and estimated accelerations of target 2 in Subsection 4.1.2"
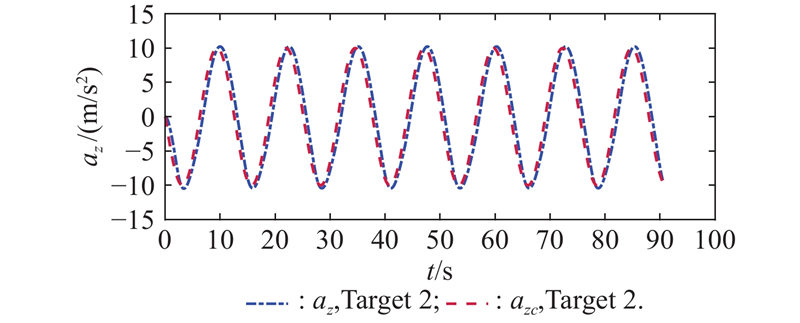
Fig 20
Component of the virtual collision point mean on the X-axis in Subsection 4.1.2"
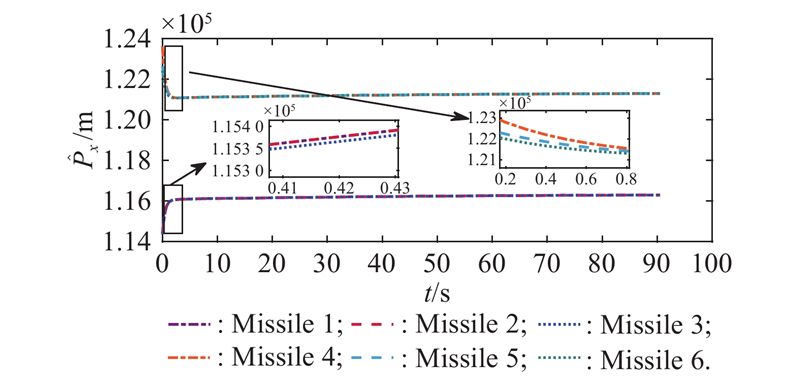
Fig 21
Component of the virtual collision point mean on the Y-axis in Subsection 4.1.2"
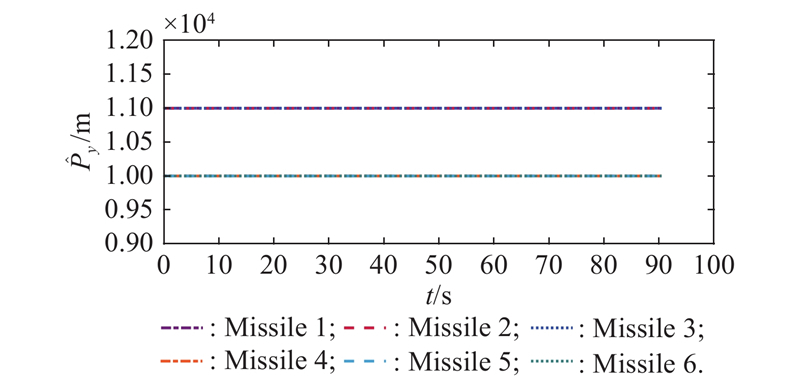
Fig 22
Component of the virtual collision point mean on the Z-axis in Subsection 4.1.2"
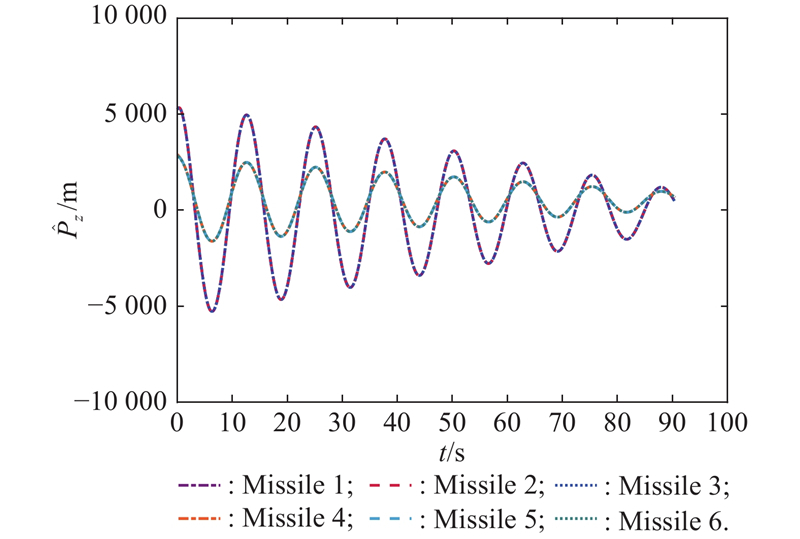
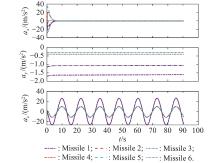
Fig 23
Accelerations of missiles in Subsection 4.1.2"
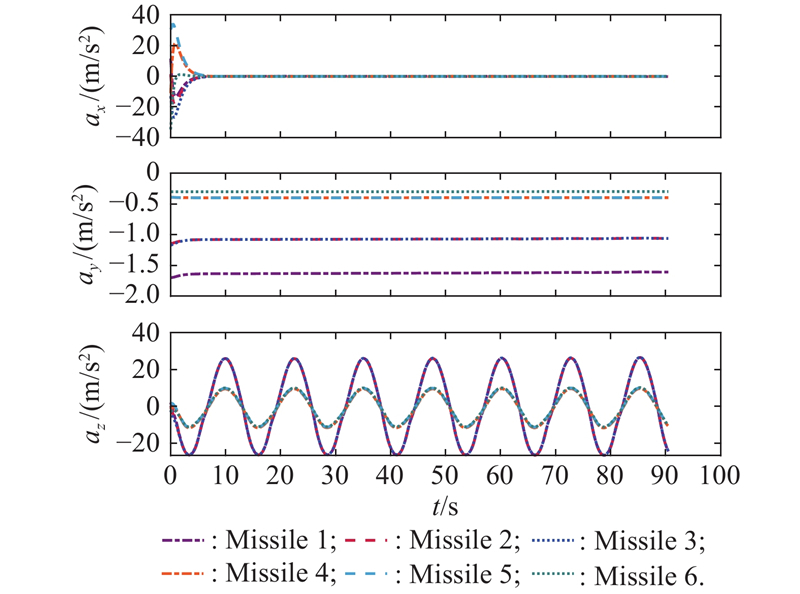
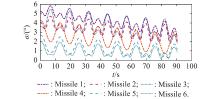
Fig 24
Lead angles of missiles in Subsection 4.1.2"
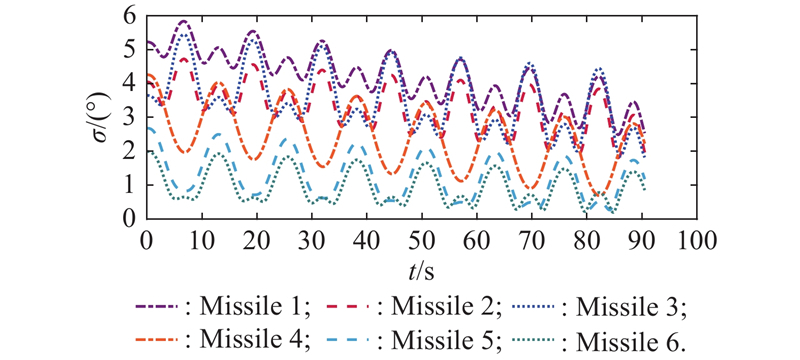
Fig 25
Trajectories of missiles and targets in Subsection 4.1.3"
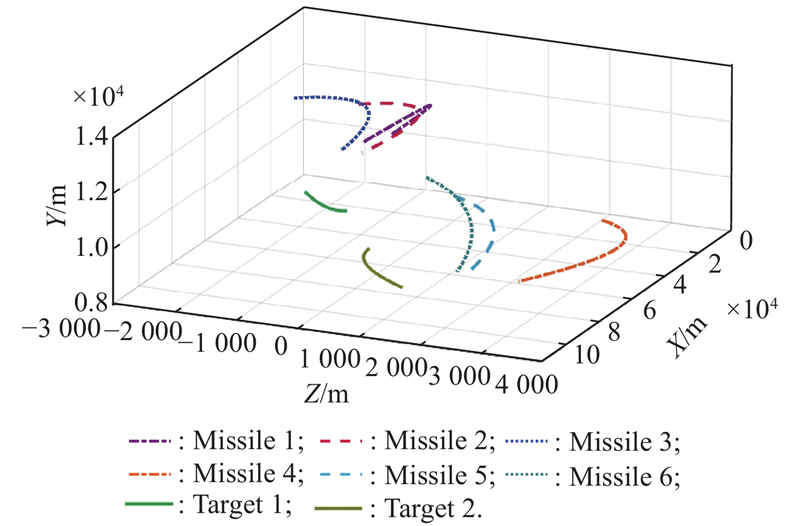
Fig 26
Relative distances between missiles and targets in Subsection 4.1.3"
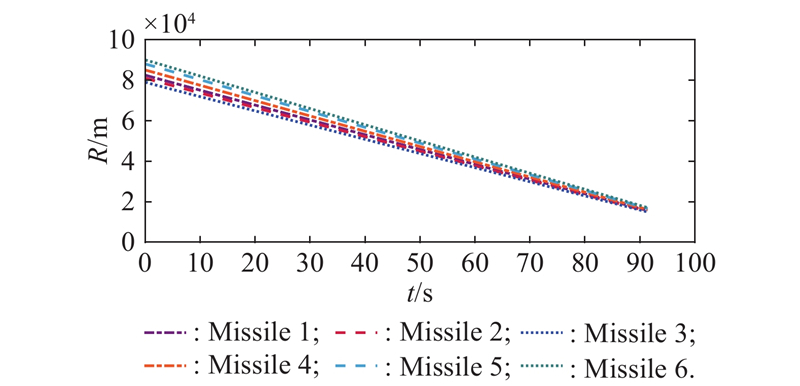
Fig 27
Time-to-go of missiles in Subsection 4.1.3"
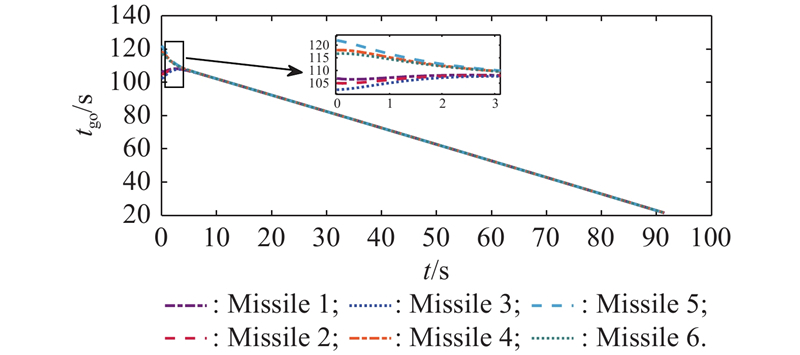
Fig 28
Actual and estimated accelerations of target 1 in Subsection 4.1.3"
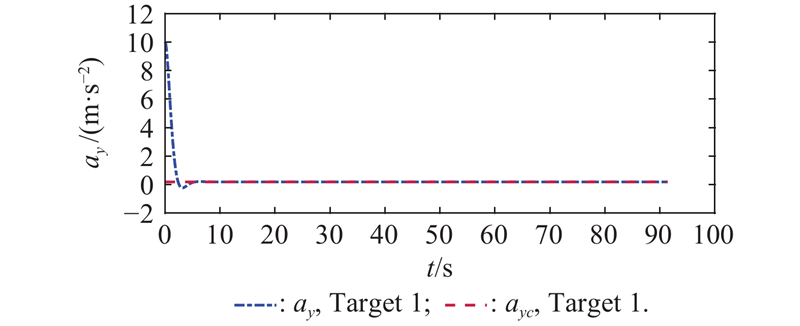
Fig 29
Actual and estimated accelerations of target 2 in Subsection 4.1.3"
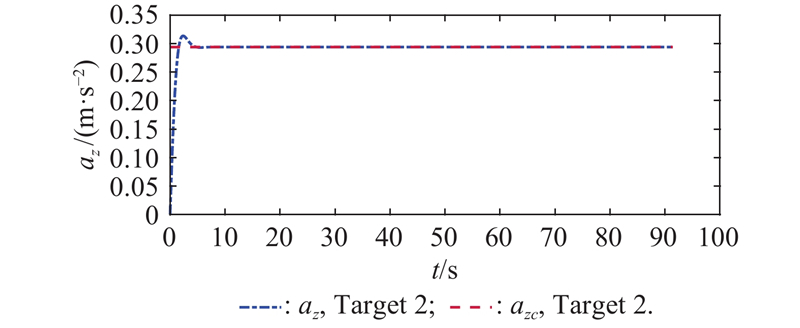
Fig 30
Component of the virtual collision point mean on the X-axis in Subsection 4.1.3"
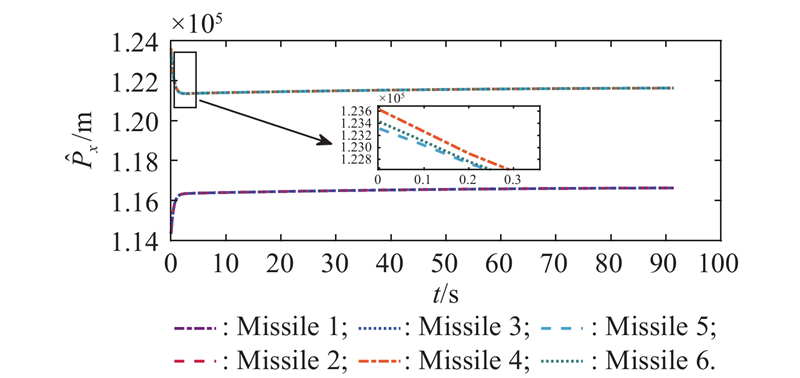
Fig 31
Component of the virtual collision point mean on the Y-axis in Subsection 4.1.3"
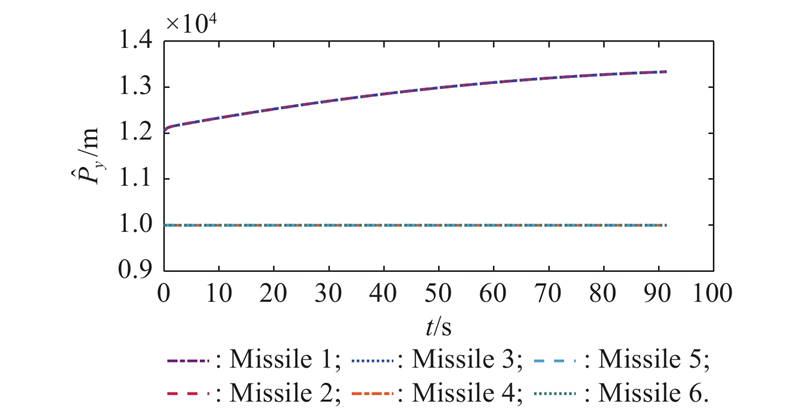
Fig 32
Component of the virtual collision point mean on the Z-axis in Subsection 4.1.3"
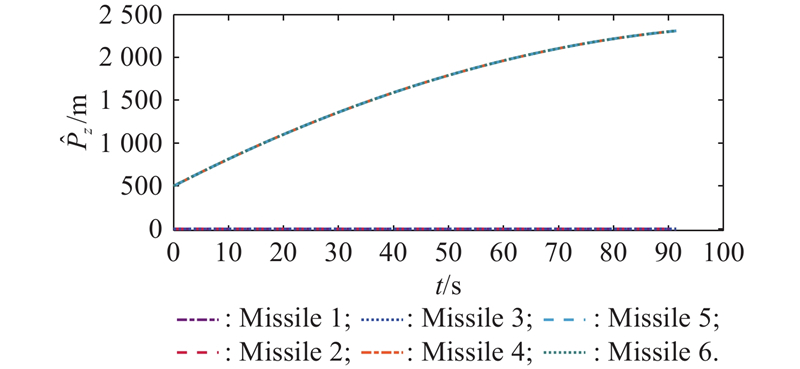

Fig 33
Accelerations of missiles in Subsection 4.1.3"
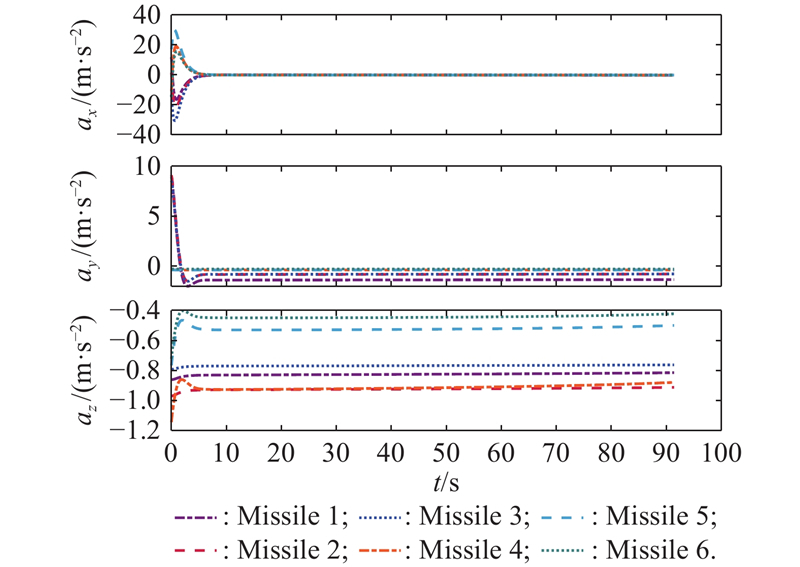
Fig 34
Lead angles of missiles in Subsection 4.1.3"
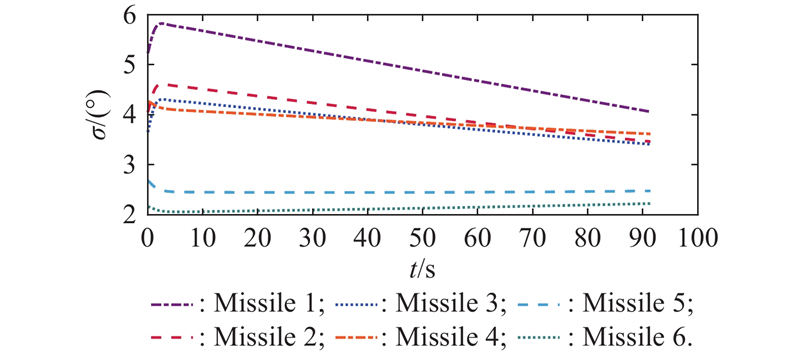
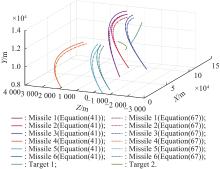
Fig 35
Trajectories of missiles and targets by two methods"
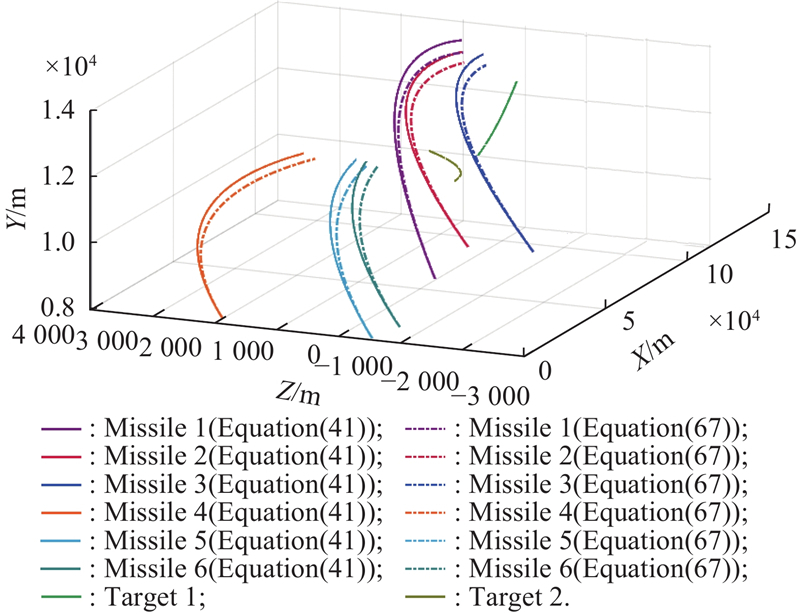
Fig 36
Time-to-go of missiles by two methods"
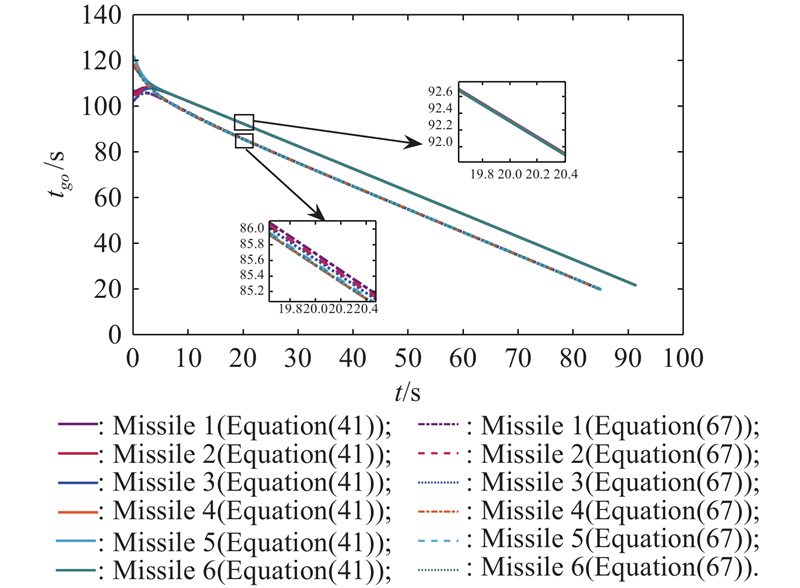

Fig 37
Actual acceleration of target 1 and estimated acceleration by two methods"
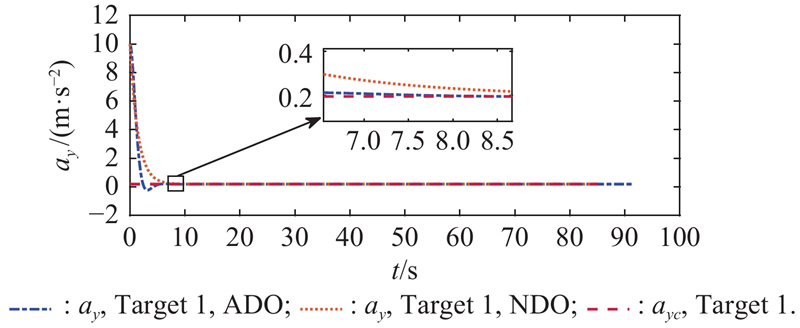
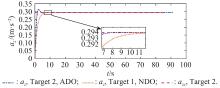
Fig 38
Actual acceleration of target 2 and estimated acceleration by two methods"
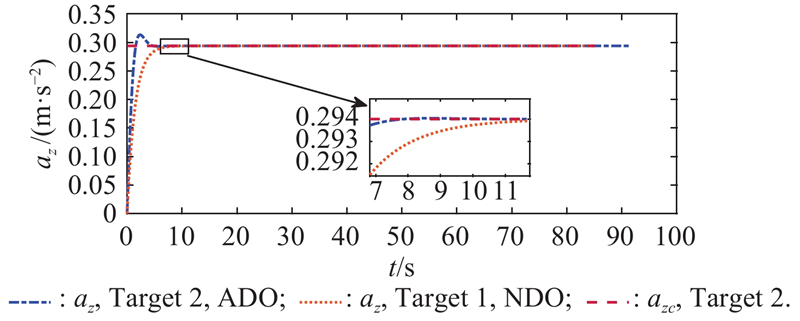
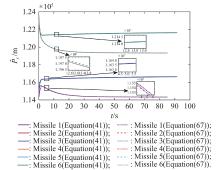
Fig 39
Component of the virtual collision point mean on the X-axis by two methods"
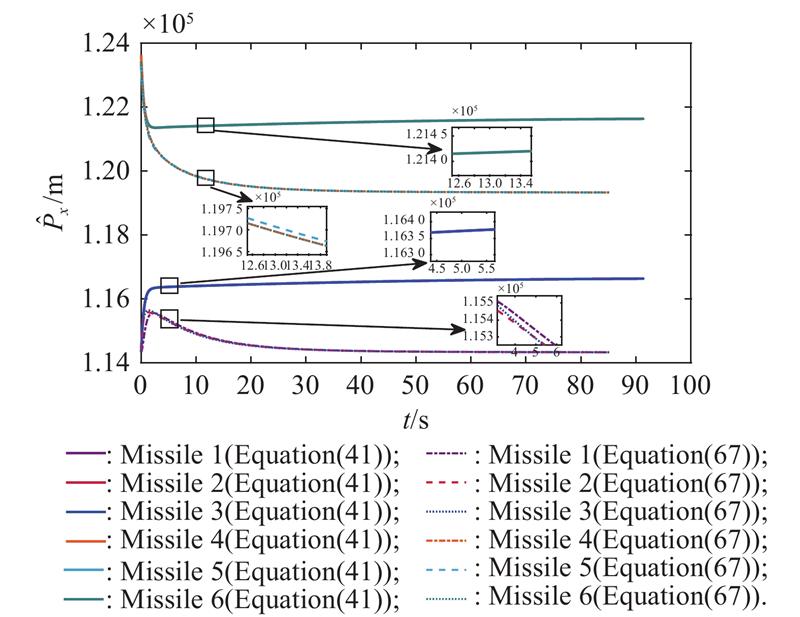
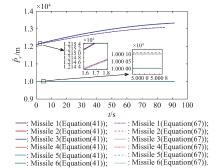
Fig 40
Component of the virtual collision point mean on the Y-axis by two methods"
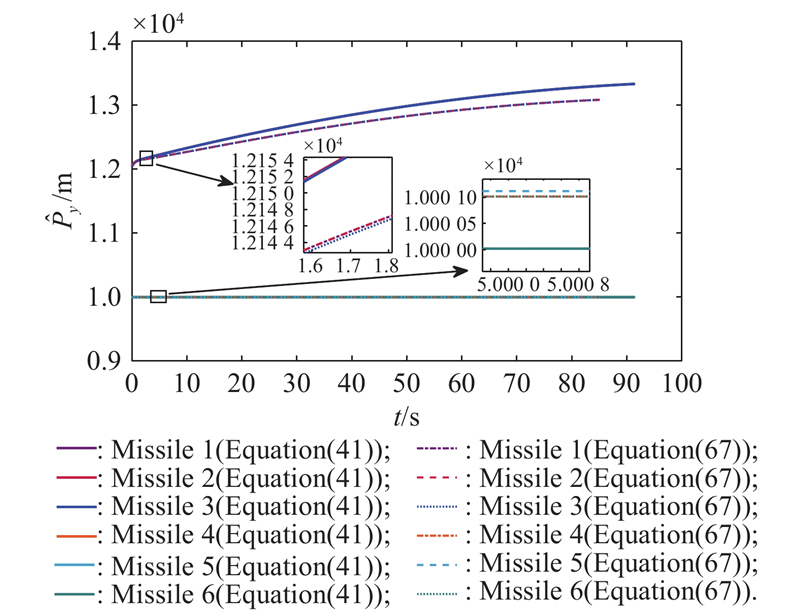
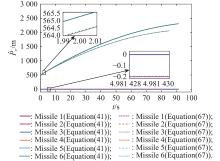
Fig 41
Component of the virtual collision point mean on the Z-axis by two methods"
| 1 |
KIM M, JUNG B, HAN B, et al Lyapunov-based impact time control guidance laws against stationary targets. IEEE Trans. on Aerospace and Electronic Systems, 2015, 51 (2): 1111- 1122.
doi: 10.1109/TAES.2014.130717 |
| 2 |
CHO D, KIM H J, TAHK M J Nonsingular sliding mode guidance for impact time control. Journal of Guidance, Control, and Dynamics, 2016, 39 (1): 61- 68.
doi: 10.2514/1.G001167 |
| 3 |
JEON I S, LEE J I Impact-time-control guidance law with constraints on seeker look angle. IEEE Trans. on Aerospace and Electronic Systems, 2017, 53 (5): 2621- 2627.
doi: 10.1109/TAES.2017.2698837 |
| 4 | LI Z H, DING Z T Robust cooperative guidance law for simultaneous arrival. IEEE Trans. on Control Systems Technology, 2018, 27 (3): 1360- 1367. |
| 5 | KIM H G, CHO D, KIM H J Sliding mode guidance law for impact time control without explicit time-to-go estimation. IEEE Trans. on Aerospace and Electronic Systems, 2018, 55 (1): 236- 250. |
| 6 | KIM H G, SHIN J Lyapunov-based impact time control guidance law with performance prediction. Aerospace, 2023, 10 (3): 308. |
| 7 |
LYU T, GUO Y N, LI C J, et al Multiple missiles cooperative guidance with simultaneous attack requirement under directed topologies. Aerospace Science and Technology, 2019, 89, 100- 110.
doi: 10.1016/j.ast.2019.03.037 |
| 8 | ZHANG Y, TANG S J, GUO J Two-stage cooperative guidance strategy using a prescribed-time optimal consensus method. Aerospace Science and Technology, 2020, 100, 105641. |
| 9 |
DONG X F, REN Z Impact angle constrained distributed cooperative guidance against maneuvering targets with undirected communication topologies. IEEE Access, 2020, 8, 117867- 117876.
doi: 10.1109/ACCESS.2020.3004128 |
| 10 | JIANG Z Y, GE J Q, XU Q Q, et al Terminal impact time control cooperative guidance law for UAVs under time-varying velocity. Drones, 2021, 5 (3): 100. |
| 11 |
WANG C Y, DONG W, WANG J N, et al Impact-angle-constrained cooperative guidance for salvo attack. Journal of Guidance, Control, and Dynamics, 2022, 45 (4): 684- 703.
doi: 10.2514/1.G006342 |
| 12 | XU H, CAI G B, FAN Y H, et al Analytic time reentry cooperative guidance for multi-hypersonic glide vehicles. Applied Sciences, 2023, 13 (8): 4987. |
| 13 |
YANG G Y, FANG Y W, MA W H, et al Cooperative trajectory shaping guidance law for multiple anti-ship missiles. The Aeronautical Journal, 2024, 128 (1319): 73- 91.
doi: 10.1017/aer.2023.38 |
| 14 |
YOU H, CHANG X L, ZHAO J F, et al Three-dimensional impact-angle-constrained fixed-time cooperative guidance algorithm with adjustable impact time. Aerospace Science and Technology, 2023, 141, 108574.
doi: 10.1016/j.ast.2023.108574 |
| 15 | LEE S, KIM J, KIM Y, et al Analytic approach to impact time guidance with look angle constraint using exact time-to-go solution. Journal of Aerospace Engineering, 2024, 37 (2): 04023118. |
| 16 | OHNISHl K A new servo method in mechatronics. Japanese Society of Electrical Engineering, 1987, 177, 83- 86. |
| 17 | HE S M, WANG W, WANG J Three-dimensional impact angle guidance laws based on model predictive control and sliding mode disturbance observer. Journal of Dynamic Systems Measurement & Control, 2016, 138 (8): 081006. |
| 18 |
CHWA D Robust nonlinear disturbance observer-based adaptive guidance law against uncertainties in missile dynamics and target maneuver. IEEE Trans. on Aerospace and Electronic Systems, 2018, 54 (4): 1739- 1749.
doi: 10.1109/TAES.2018.2801392 |
| 19 |
MAN C Y, LIU R J, LI S H Three-dimensional suboptimal guidance law based on θ-D technique and nonlinear disturbance observer. Proceedings of the Institution of Mechanical Engineers, 2019, 233 (14): 5122- 5133.
doi: 10.1177/0954410019837123 |
| 20 |
PENG C, ZHANG H W, HE Y X, et al State-following-kernel-based online reinforcement learning guidance law against maneuvering target. IEEE Trans. on Aerospace and Electronic Systems, 2022, 58 (6): 5784- 5797.
doi: 10.1109/TAES.2022.3178770 |
| 21 | WANG C Y, WANG M, LI H, et al Design of terminal guidance law with acceleration compensation of maneuvering target. Electronic Design Engineering, 2023, 31 (22): 52- 56. |
| 22 | XU W P, LIAO Y X, WANG Z S, et al Adaptive finite time prescribed performance guidance law for intercepting maneuvering target. Journal of Astronautics, 2023, 44 (10): 1593- 1603. |
| 23 | YOU H, CHANG X L, ZHAO J F, et al Second-order sliding mode guidance law of a nonsingular fast terminal with a terminal angular constraint. International Journal of Aeronautical and Space Sciences, 2022, 24 (1): 237- 247. |
| 24 | WANG Y C, WANG W, LEI H B, et al Observer-based robust impact angle control three-dimensional guidance laws with autopilot lag. Aerospace Science and Technology, 2023, 141, 108505. |
| 25 |
ZHAO Q L, DONG X W, LIANG Z X, et al Distributed group cooperative guidance for multiple missiles with fixed and switching directed communication topologies. Nonlinear Dynamics, 2017, 90 (4): 2507- 2523.
doi: 10.1007/s11071-017-3816-3 |
| 26 | MA W H, LIANG X G, FANG Y W, et al Three-dimensional prescribed-time pinning group cooperative guidance law. International Journal of Aerospace Engineering, 2021, 2021 (1): 4490211. |
| 27 |
MA X, DAI K R, ZOU Y, et al Fixed-time anti-saturation grouped cooperative guidance law with state estimations of multiple maneuvering targets. Journal of the Franklin Institute, 2023, 360 (8): 5524- 5547.
doi: 10.1016/j.jfranklin.2023.02.031 |
| 28 | MA W H, FU W X, FANG Y W, et al Prescribed-time cooperative guidance law with switching communication topologies. Journal of Astronautics, 2023, 44 (1): 86- 98. |
| 29 |
ZHANG H Q, TANG S J, GUO J Cooperative near-space interceptor mid-course guidance law with terminal handover constraints. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2019, 233 (6): 1960- 1976.
doi: 10.1177/0954410018769182 |
| 30 |
WU Z H, FANG Y W, FU W X, et al Three-dimensional cooperative mid-course guidance law against the maneuvering target. IEEE Access, 2020, 8, 18841- 18851.
doi: 10.1109/ACCESS.2020.2968593 |
| 31 | WU Z H, REN Q B, LUO Z Q, et al Cooperative midcourse guidance law with communication delay. International Journal of Aerospace Engineering, 2021, 2021 (1): 3460389. |
| 32 |
GUO X W, FAN Y H, ZHANG M H, et al Design of finite time cooperative mid-course guidance law for unmanned target drone aircrafts. Journal of Northwestern Polytechnical University, 2023, 41 (1): 97- 104.
doi: 10.1051/jnwpu/20234110097 |
| 33 | YANG H M, LI Y, ZHANG F, et al Guidance law in distributed cooperative air-to-air missile considering detection effectiveness. Control Theory & Applications, 2024, 41 (4): 638- 648. |
| 34 |
LI S, JIANG X Q RBF neural network based second-order sliding mode guidance for Mars entry under uncertainties. Aerospace Science and Technology, 2015, 43, 226- 235.
doi: 10.1016/j.ast.2015.03.006 |
| 35 | LUKACS J, YAKIMENKO O. Trajectory-shape-varying missile guidance for interception of ballistic missiles during the boost phase. Proc. of the AIAA Guidance, Navigation and Control Conference and Exhibit, 2007: 6538. |
| 36 | GE Y T Application of fundamental inequality. Science & Technology Information, 2020, 18 (30): 138- 139. |
| 37 |
LONG T, YANG S S, WANG Q Z, et al Finite-time consensus of nonlinear multi-agent systems via impulsive time window theory: a two-stage control strategy. Nonlinear Dynamics, 2021, 105 (4): 3285- 3297.
doi: 10.1007/s11071-021-06803-7 |
| 38 | CHEN L J, ZHANG Y, XIA L L Finite-time consensus for leader-following multi-agent systems. Computer Simulation, 2018, 35 (5): 274- 277. |
| 39 |
WANG F, CHNE B, LIN C, et al Adaptive neural network finite-time output feedback control of quantized nonlinear systems. IEEE Trans. on Cybernetics, 2018, 48 (6): 1839- 1848.
doi: 10.1109/TCYB.2017.2715980 |
| 40 |
OLFATI-SABER R, MURRAY R M Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. on Automatic Control, 2004, 49 (9): 1520- 1533.
doi: 10.1109/TAC.2004.834113 |
| 41 | HE T, LU Q, ZHOU J, et al Terminal impact angle constraint guidance law with neural network interference observer. Systems Engineering and Electronics, 2024, 46 (4): 1372- 1382. |
| 42 |
LIAO X F, JI L H On pinning group consensus for dynamical multi-agent networks with general connected topology. Neurocomputing, 2014, 135, 262- 267.
doi: 10.1016/j.neucom.2013.12.024 |
| [1] | Hao YANG, Shifeng ZHANG, Xibin BAI, Chengye YANG. Impact time control guidance for moving-target considering velocity variation and field-of-view constraint [J]. Journal of Systems Engineering and Electronics, 2025, 36(2): 552-568. |
| [2] | Jia HUANG, Sijiang CHANG, Shengfu CHEN. A hybrid proportional navigation based two-stage impact time control guidance law [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 461-473. |
| [3] | Xiaojian Zhang, Mingyong Liu, and Yang Li. Sliding mode control and Lyapunov based guidance law with impact time constraints#br# [J]. Journal of Systems Engineering and Electronics, 2017, 28(6): 1186-1192. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||