
Journal of Systems Engineering and Electronics ›› 2026, Vol. 37 ›› Issue (1): 307-317.doi: 10.23919/JSEE.2026.000008
• SYSTEMS ENGINEERING • Previous Articles Next Articles
Yun ZHONG1,*( ), Lujun WAN2(), Jieyong ZHANG1()
), Lujun WAN2(), Jieyong ZHANG1()
Received:2023-11-13
Online:2026-02-18
Published:2026-03-09
Contact:
Yun ZHONG
E-mail:718227697@qq.com;pandawlj@126.com;dumu3110728@126.com
About author:Supported by:Yun ZHONG, Lujun WAN, Jieyong ZHANG. MAV-UAV combat organization’s force formation plan generation based on NSGA-III[J]. Journal of Systems Engineering and Electronics, 2026, 37(1): 307-317.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
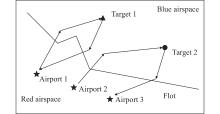
Fig 1
Conceptual diagram of AFGTAP"
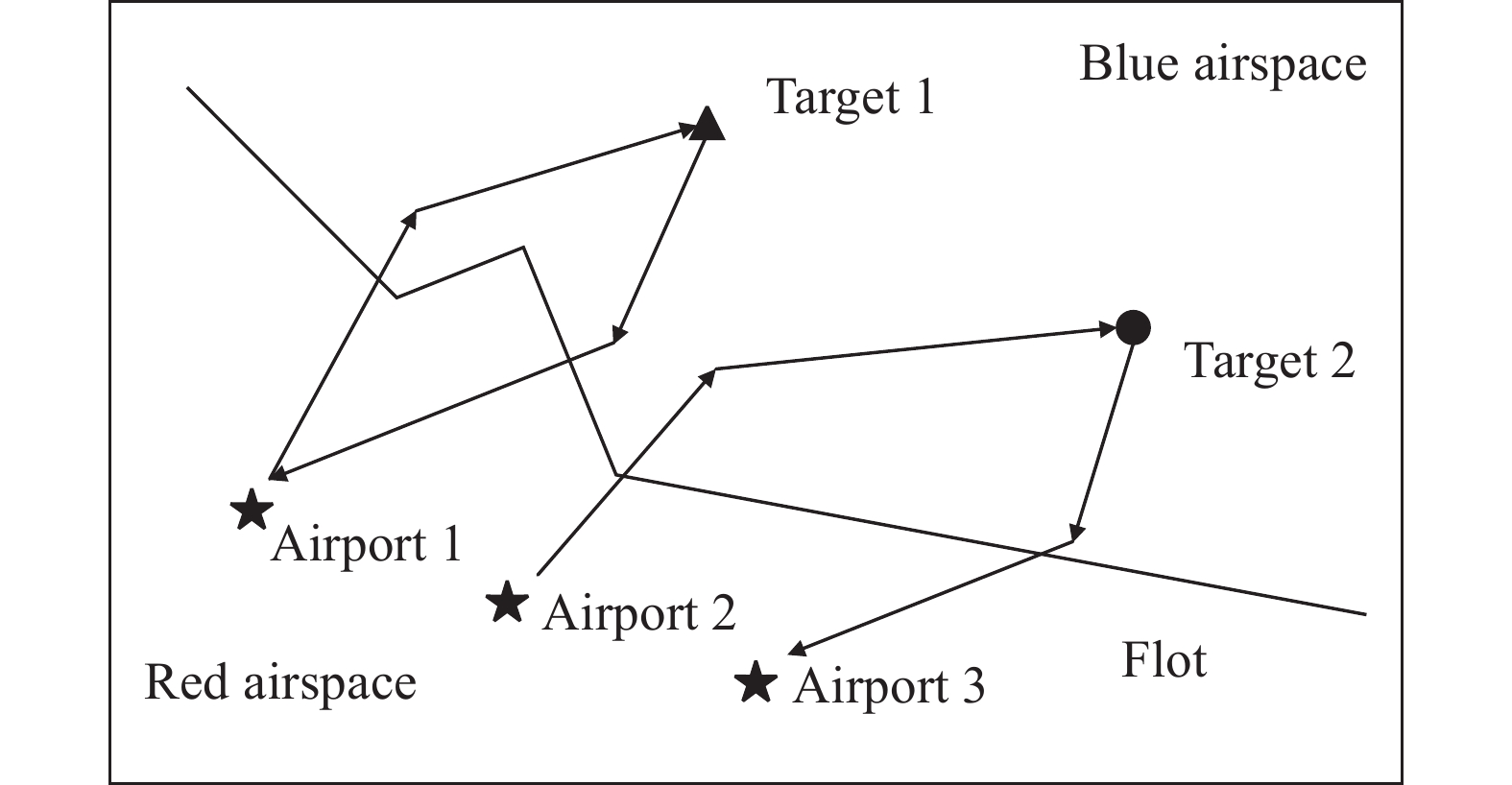
Table 1
Target resource requirements"
| Wave | Target | Resource requirement | |||||
| r1 | r2 | r3 | r4 | r5 | r6 | ||
| Wave 1 | T1 | 3 | 1 | 0 | 0 | 0 | 0 |
| T24 | 1 | 2 | 0 | 0 | 0 | 0 | |
| Wave 2 | T25 | 0 | 3 | 2 | 0 | 0 | 0 |
| T48 | 0 | 2 | 2 | 0 | 0 | 0 | |
| Wave 3 | T49 | 0 | 0 | 2 | 3 | 0 | 0 |
| T71 | 0 | 0 | 1 | 3 | 0 | 0 | |
| Wave 4 | T72 | 0 | 0 | 0 | 0 | 2 | 2 |
| T100 | 0 | 0 | 0 | 0 | 2 | 2 | |
Table 2
UAV resource capability"
| UAV | Resource capability | |||||
| r1 | r2 | r3 | r4 | r5 | r6 | |
| U1 | 4 | 5 | 5 | 3 | 4 | 4 |
| U10 | 3 | 4 | 4 | 6 | 6 | 3 |
| U20 | 6 | 3 | 3 | 5 | 5 | 6 |
| U30 | 5 | 4 | 5 | 2 | 4 | 6 |
| U40 | 4 | 3 | 4 | 3 | 5 | 6 |
| U50 | 3 | 2 | 3 | 4 | 3 | 5 |
| U60 | 2 | 2 | 4 | 4 | 4 | 3 |
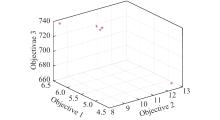
Fig 2
Pareto solution set of the 1st iteration"

Fig 3
Pareto solution set of the 100th iteration"
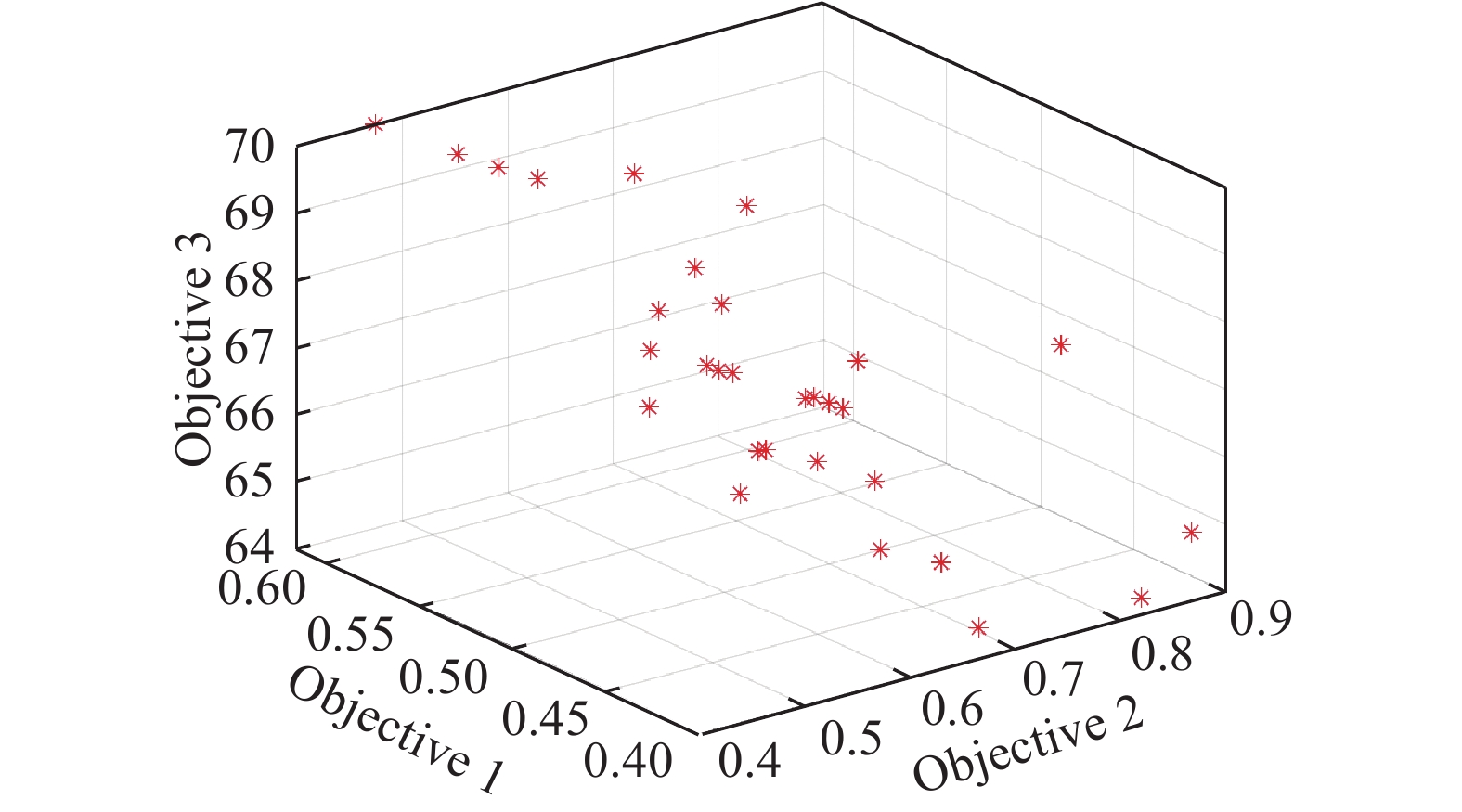
Fig 4
Pareto solution set of the 200th iteration"
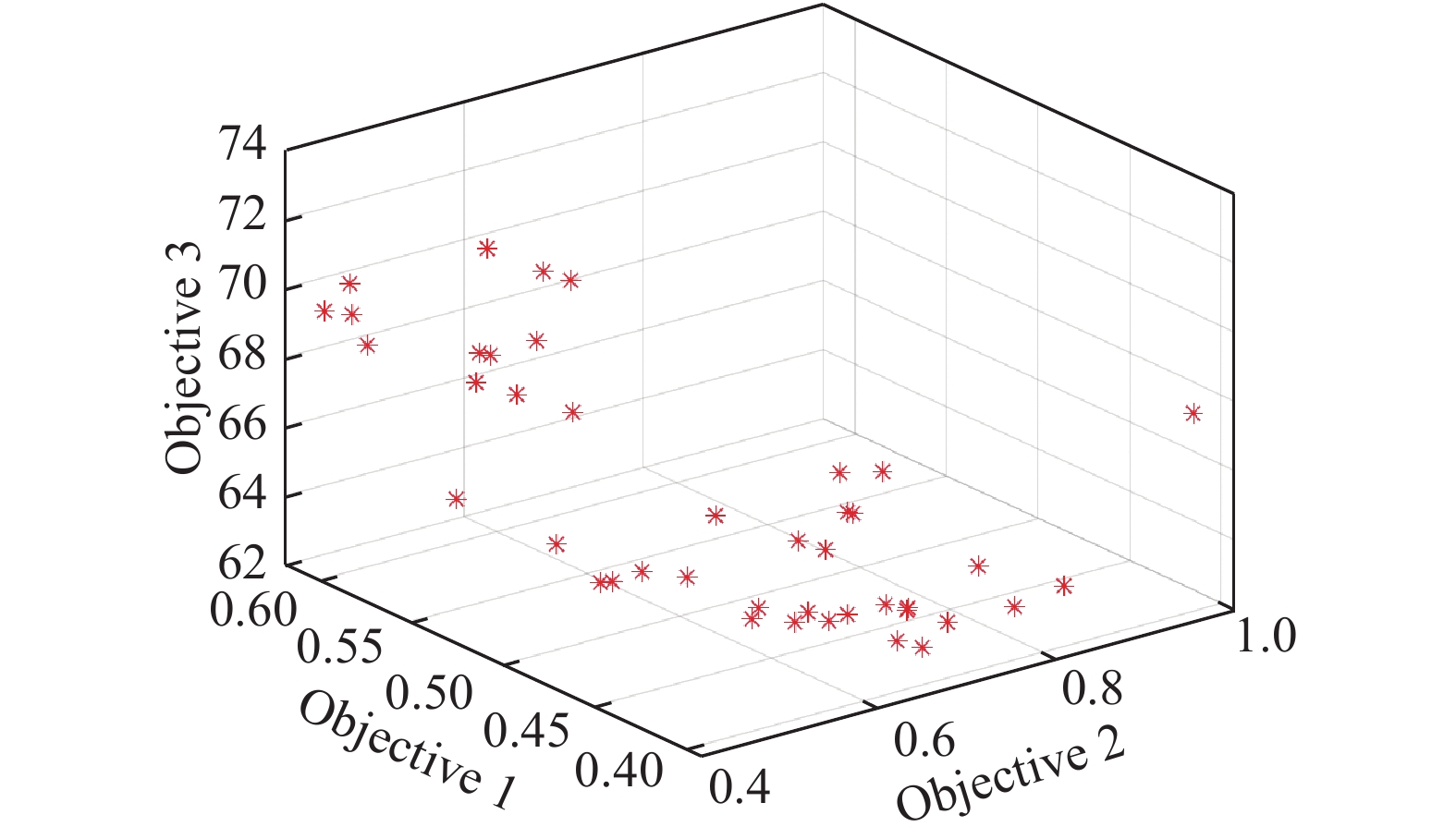
Table 3
Plan for typical solution scenarios"
| Wave | Allocated platform | ||
| Wave 1 | U2, U4, U9, U12, U14, U19, U23, U26, U31, U39, U44, U46, U48, U49, U50, U52, U53, M1, M4, M9, M10 | 0.65 | (0.30,0.40) |
| Wave 2 | U6, U7, U11, U17, U21, U24, U29, U35, U38, U43, U45, U47, U51, U58, U59, M5, M8, M13 | 0.60 | (0.27,0.35) |
| Wave 3 | U1, U2, U3, U5, U9, U10, U13, U16, U18, U19, U20, U27, U30, U33, U39, U50, U52, U55, U56, U57, M1, M3, M6, M7 | 0.55 | (0.89,0.60) |
| Wave 4 | U4, U7, U11, U12, U14, U15, U17, U23, U25, U26, U28, U31, U32, U34, U37, U41, U42, U44, U45, U46, U48, U54, M2, M4, M8, M10, M12, M14 | 0.77 | (0.47,0.37) |
Table 4
Specific allocation of platforms"
| Allocation | Specific platform |
| Unallocated | U8, U22, U36, U40, U60, U71, U75 |
| Allocated to any wave | U1, U3, U5, U6, U10, U13, U15, U16, U18, U20, U21, U24, U25, U27, U28, U29, U30, U32, U33, U34, U35, U37, U38, U41, U42, U43, U47, U49, U51, U53, U54, U55, U56, U57, U58, U59, U62, U63, U65, U66, U67, U69, U72, U73, U74 |
| Allocated to wave 1 and wave 3 | U2, U9, U19, U39, U50, U52, U61 |
| Allocated to wave 1 and wave 4 | U4, U12, U14, U23, U26, U31, U44, U46, U48, U64, U70 |
| Allocated to wave 2 and wave 4 | U7, U11, U17, U45, U68 |
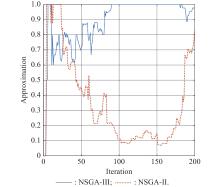
Fig 5
Comparison of approximation"
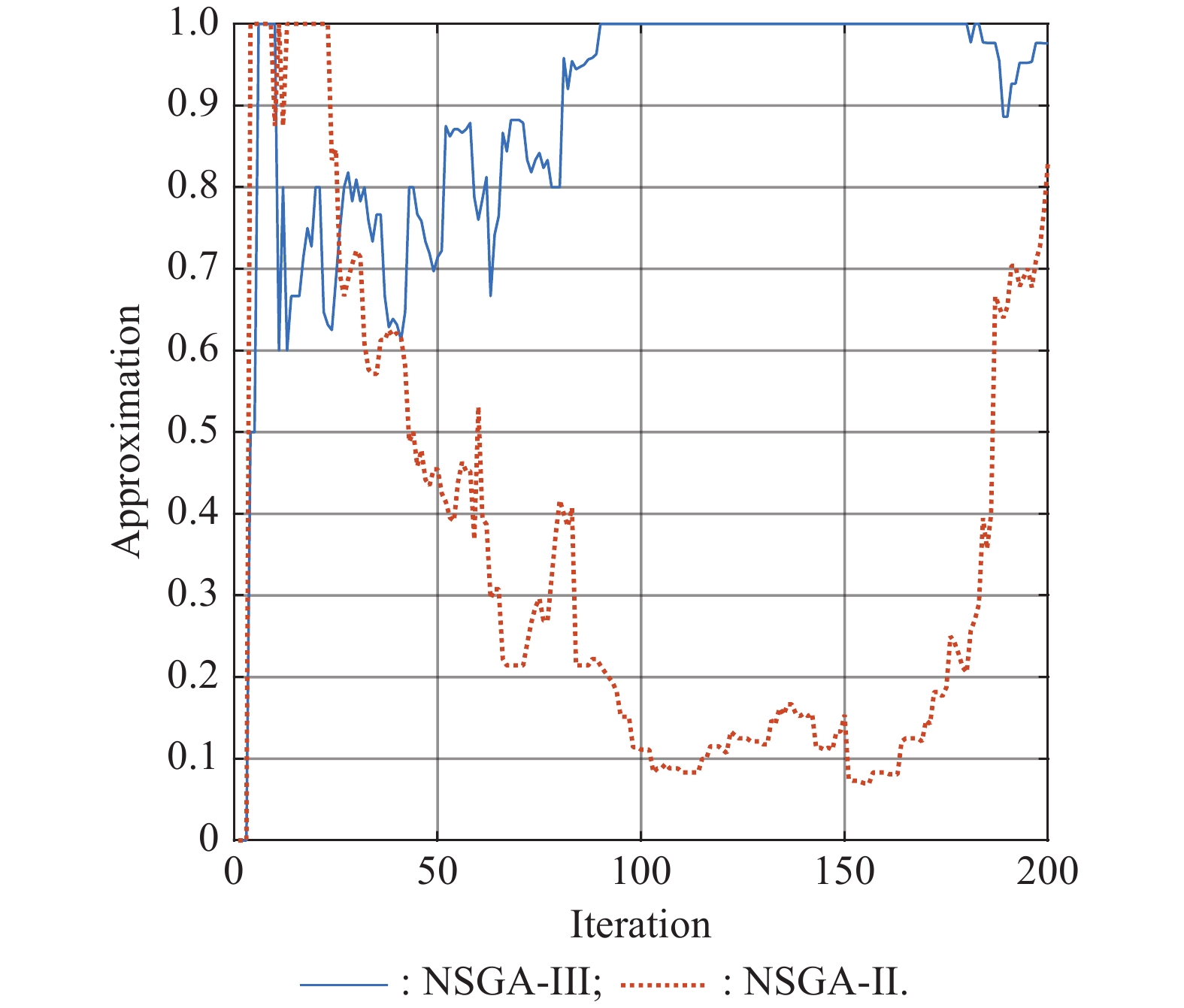
Fig 6
Comparison of uniformity"
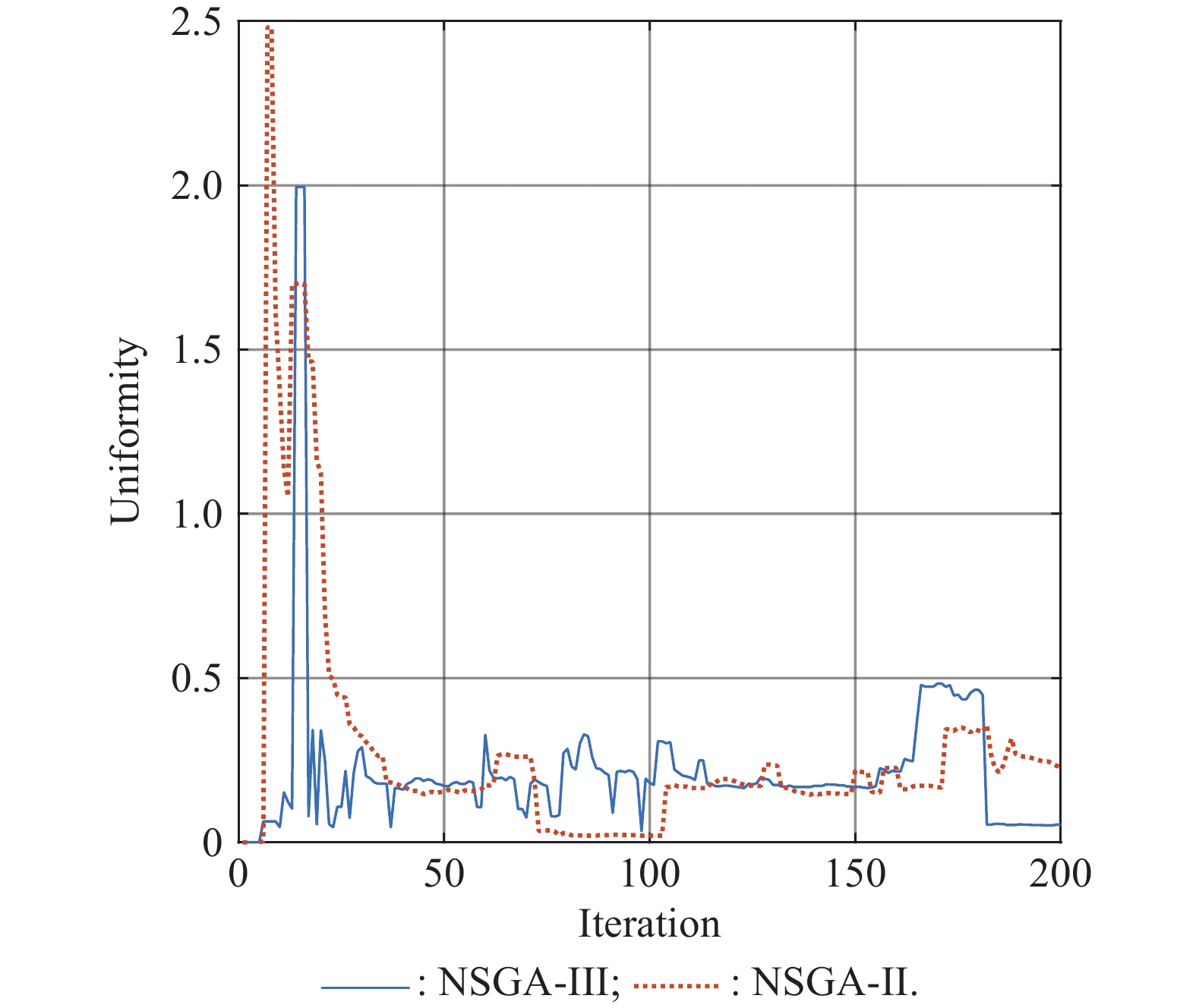
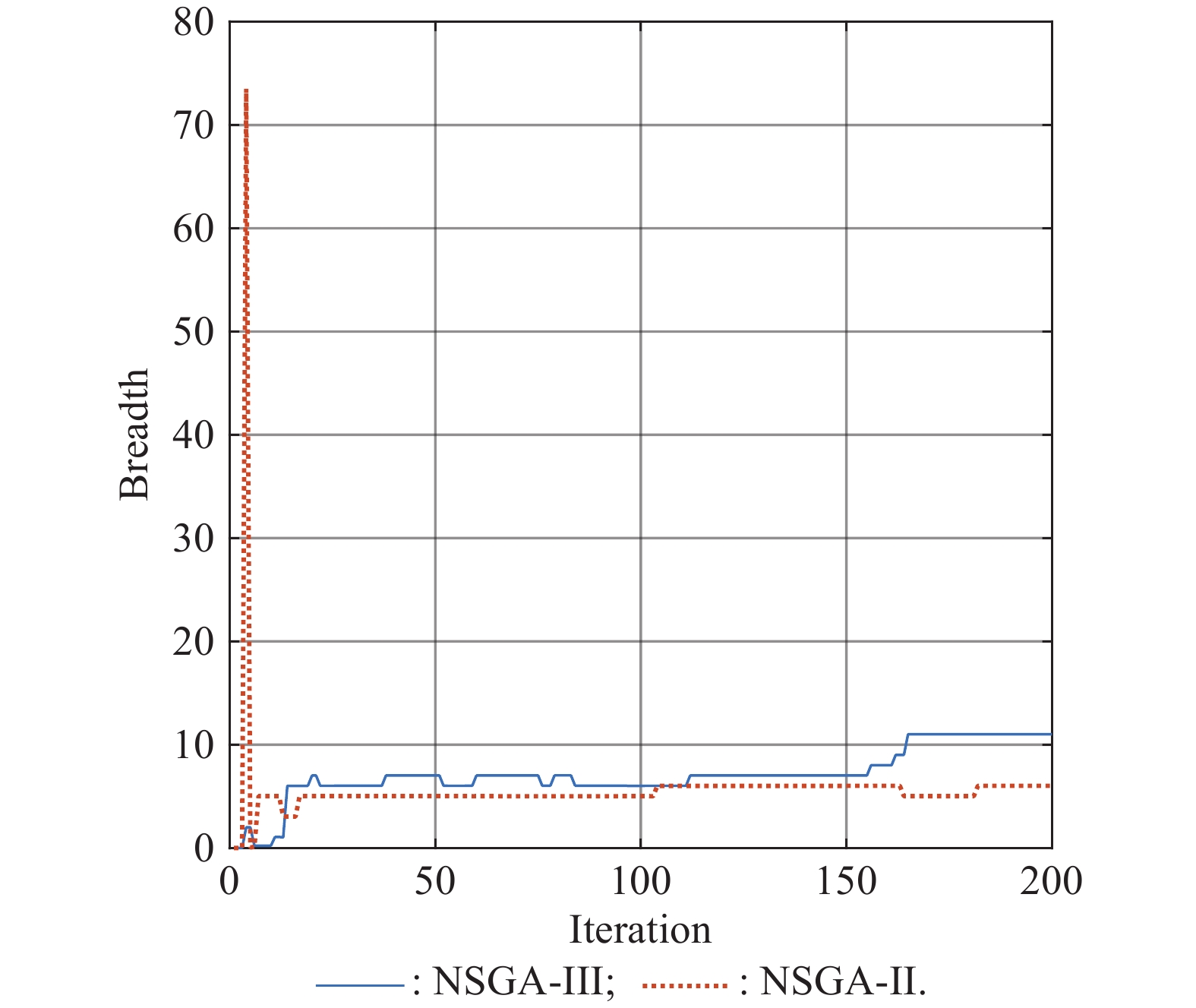
Fig 7
Comparison of breadth"
| 1 |
FAN J R, LI D G, LI R P, et al Analysis on MAV/UAV cooperative combat based on complex network. Defense Technology, 2020, 16 (1): 150- 157.
doi: 10.1016/j.dt.2019.09.002 |
| 2 |
WANG X Y, CAO Y F, DING M, et al Research progress in modeling and evaluation of cooperative operation system-of-systems for manned-unmanned aerial vehicles. IEEE Aerospace and Electronic Systems Magazine, 2024, 39 (4): 6- 31.
doi: 10.1109/MAES.2023.3347504 |
| 3 |
LI W G, LIU Y, SHI F M, et al A review of manned/unmanned aerial vehicle cooperative technology and application in US. military. International Journal of Advanced Network, Monitoring and Controls, 2024, 9 (2): 100- 107.
doi: 10.2478/ijanmc-2024-0020 |
| 4 | LI Y, HAN W, WANG Y Q Deep reinforcement learning with application to air confrontation intelligent decision-making of manned/unmanned aerial vehicle cooperative system. IEEE Access, 2020, 8, 67877- 67898. |
| 5 | HUO M Z, DUAN H B, ZENG Z G Cluster space control method of manned-unmanned aerial team for target search task. IEEE Trans. on Circuits and Systems II: Express Briefs, 2023, 70 (7): 2545- 2549. |
| 6 |
LIAO Y, GAO G, JING Y H Ultra-reliable intelligent link scheduling based on DRL for manned/unmanned aerial vehicle cooperative scenarios. Physical Communication, 2024, 63, 102304.
doi: 10.1016/j.phycom.2024.102304 |
| 7 |
CHEN J, QIU X J, RONG J, et al Design method of organizational structure for MAVs and UAVs heterogeneous team with adjustable autonomy. Journal of Systems Engineering and Electronics, 2018, 29 (2): 286- 295.
doi: 10.21629/JSEE.2018.02.09 |
| 8 | WU H S, PENG Q, SHI M M, et al A survey of UAV swarm task allocation based on the perspective of coalition formation. International Journal of Swarm Intelligence Research, 2022, 13 (1): 1- 22. |
| 9 | HAN B W, YAO P Y Coalition formation of manned/unmanned aerial vehicle cluster based on Holon organization. Systems Engineering and Electronics, 2018, 40 (1): 91- 97. |
| 10 |
ZHONG Y, YAO P Y, ZHANG J Y, et al Formation and adjustment of manned/unmanned combat aerial vehicle cooperative engagement system. Journal of Systems Engineering and Electronics, 2018, 29 (4): 756- 767.
doi: 10.21629/JSEE.2018.04.10 |
| 11 | BO N, LI X M, DAI J J, et al MDP based air-to-ground attack operation planning for manned/unmanned aerial vehicle formation. Electronics Optics & Control, 2019, 26 (2): 16- 22. |
| 12 | ZHOU Y M, ZHAO H R, CHEN J F, et al A novel mission planning method for UAVs’ course of action. Computer Communications, 2020, 152 (4): 345- 356. |
| 13 |
SON S B, KIM D H Searching for scalable networks in unmanned aerial vehicle infrastructure using spatio-attack course-of- action. Drones, 2023, 7, 249.
doi: 10.3390/drones7040249 |
| 14 | ZHONG Y, YAO P Y, SUN Y, et al Phased-forming method of manned/ unmanned aerial vehicle task coalition. Systems Engineering and Electronics, 2017, 39 (9): 2031- 2038. |
| 15 |
JIAO Z Q, YAO P Y, ZHANG J Y, et al MAV/UAV task allocation coalition phased-formation method. Journal of Systems Engineering and Electronics, 2019, 30 (2): 402- 414.
doi: 10.21629/JSEE.2019.02.18 |
| 16 |
RAMIREZ A C, DEL S J, CAMACHO D Weighted strategies to guide a multi-objective evolutionary algorithm for multi-UAV mission planning. Swarm and Evolutionary Computation, 2019, 44, 480- 495.
doi: 10.1016/j.swevo.2018.06.005 |
| 17 | Enterprise Capability Collaboration Team (ECCT). Air superiority 2030 flight plan. https://www.aerotechnews.com/aog/2016/06/01/af-releases-air-superiority-2030-flight-plan/. |
| 18 |
HU X X, MA H W, YE Q S, et al Hierarchical method of task assignment for multiple cooperating UAV teams. Journal of Systems Engineering and Electronics, 2015, 26 (5): 1000- 1009.
doi: 10.1109/JSEE.2015.00109 |
| 19 | TAM J A. Enabling large-scale context in low-echelon training with air tasking order generation. Monterey: Naval Postgraduate School, 2023. |
| 20 | CALHOUN K M. A tabu search for scheduling and rescheduling combat aircraft. Ohio: Air Force Institute of Technology, 2000. |
| 21 |
AHNER D K, PARSON C R Optimal multi-stage allocation of weapons to targets using adaptive dynamic programming. Optimization Letters, 2015, 9 (8): 1689- 1701.
doi: 10.1007/s11590-014-0823-x |
| 22 | LI W G, DONG C. An architecture design of intelligent task planning system for precision strike ammunition. Proc. of the International Conference on Intelligent Systems, Communications, and Computer Networks, 2023. DOI: 10.1117/12.2679761. |
| 23 |
LIU S C, ZHAN Z H, TAN K C, et al A multi-objective framework for many-objective optimization. IEEE Trans. on Cybernetics, 2022, 52 (12): 13654- 13668.
doi: 10.1109/TCYB.2021.3082200 |
| 24 |
LI W H, ZHANG T, WANG R, et al Multimodal multi-objective optimization: comparative study of the state-of-the-art. Swarm and Evolutionary Computation, 2023, 77, 101253.
doi: 10.1016/j.swevo.2023.101253 |
| 25 |
DEB K, JAIN H An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, Part I: solving problems with box constraints. IEEE Trans. on Evolutionary Computation, 2014, 18 (4): 577- 601.
doi: 10.1109/TEVC.2013.2281535 |
| 26 |
LI S C, ZHANG M, WANG N, et al Intelligent scheduling method for multi-machine cooperative operation based on NSGA-III and improved ant colony algorithm. Computers and Electronics in Agriculture, 2023, 204, 107532.
doi: 10.1016/j.compag.2022.107532 |
| 27 |
TANG H T, XIAO Y, ZHANG W, et al A DQL-NSGA-III algorithm for solving the flexible job shop dynamic scheduling problem. Expert Systems with Applications, 2024, 237, 121723.
doi: 10.1016/j.eswa.2023.121723 |
| 28 |
ZHANG J R, CAI J F, ZHANG H C, et al NSGA-III integrating eliminating strategy and dynamic constraint relaxation mechanism to solve many-objective optimal power flow problem. Applied Soft Computing, 2023, 146, 110612.
doi: 10.1016/j.asoc.2023.110612 |
| 29 |
PENG H, XU Z Z, QIAN J Y, et al Evolutionary constrained optimization with hybrid constraint-handling techni- que. Expert Systems with Applications, 2023, 211, 118660.
doi: 10.1016/j.eswa.2022.118660 |
| 30 |
NIKOS D L, MAKIS K, NIKS A K, et al Constraint handling techniques for metaheuristics: a state-of-the-art review and new variants. Optimization and Engineering, 2023, 24, 2251- 2298.
doi: 10.1007/s11081-022-09782-9 |
| 31 |
ZITZLER E, DEB K, THIELE L Comparison of multi-objective evolutionnary algorithms: empirical results. Evolutionary Computation, 2000, 8 (2): 173- 195.
doi: 10.1162/106365600568202 |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||