
Journal of Systems Engineering and Electronics ›› 2026, Vol. 37 ›› Issue (2): 670-686.doi: 10.23919/JSEE.2026.000098
• CONTROL THEORY AND APPLICATION • Previous Articles
Zhitong YU( ), Haibin SHANG(), Zichen ZHAO(), Xuefen ZHANG()
), Haibin SHANG(), Zichen ZHAO(), Xuefen ZHANG()
Received:2025-03-10
Online:2026-04-18
Published:2026-04-30
Contact:
Haibin SHANG
E-mail:bityzt@163.com;shanghb@bit.edu.cn;BitZhaozc@foxmail.com;bitzxf2021@163.com
About author:Supported by:Zhitong YU, Haibin SHANG, Zichen ZHAO, Xuefen ZHANG. Trajectory tracking near asteroids using relaxed Lyapunov-based model predictive control[J]. Journal of Systems Engineering and Electronics, 2026, 37(2): 670-686.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
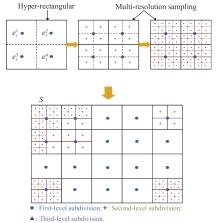
Fig 1
Schematic of multi-resolution sampling-based search method"
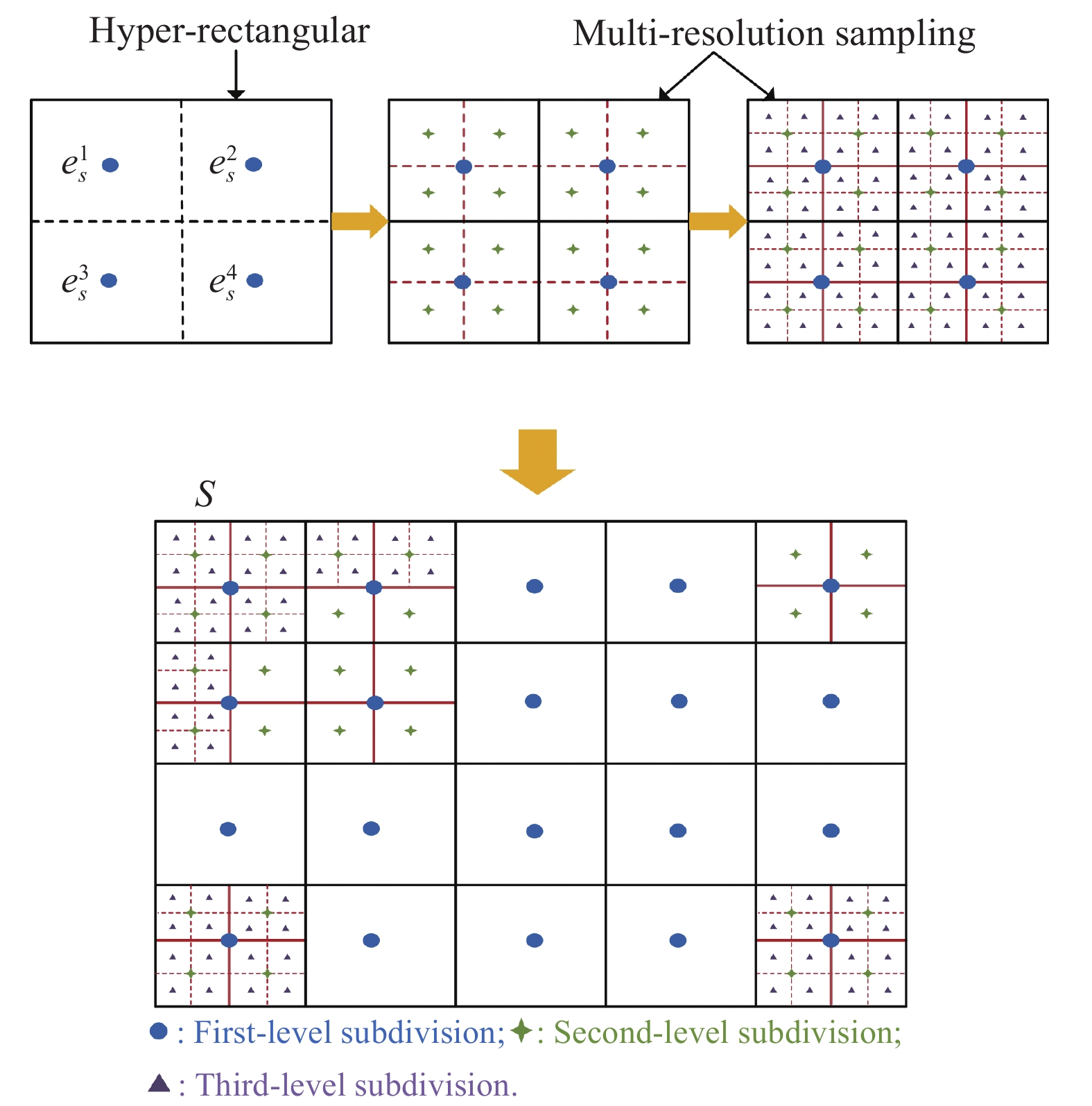
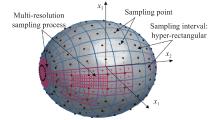
Fig 2
The proposed multi-resolution sampling-based search method"
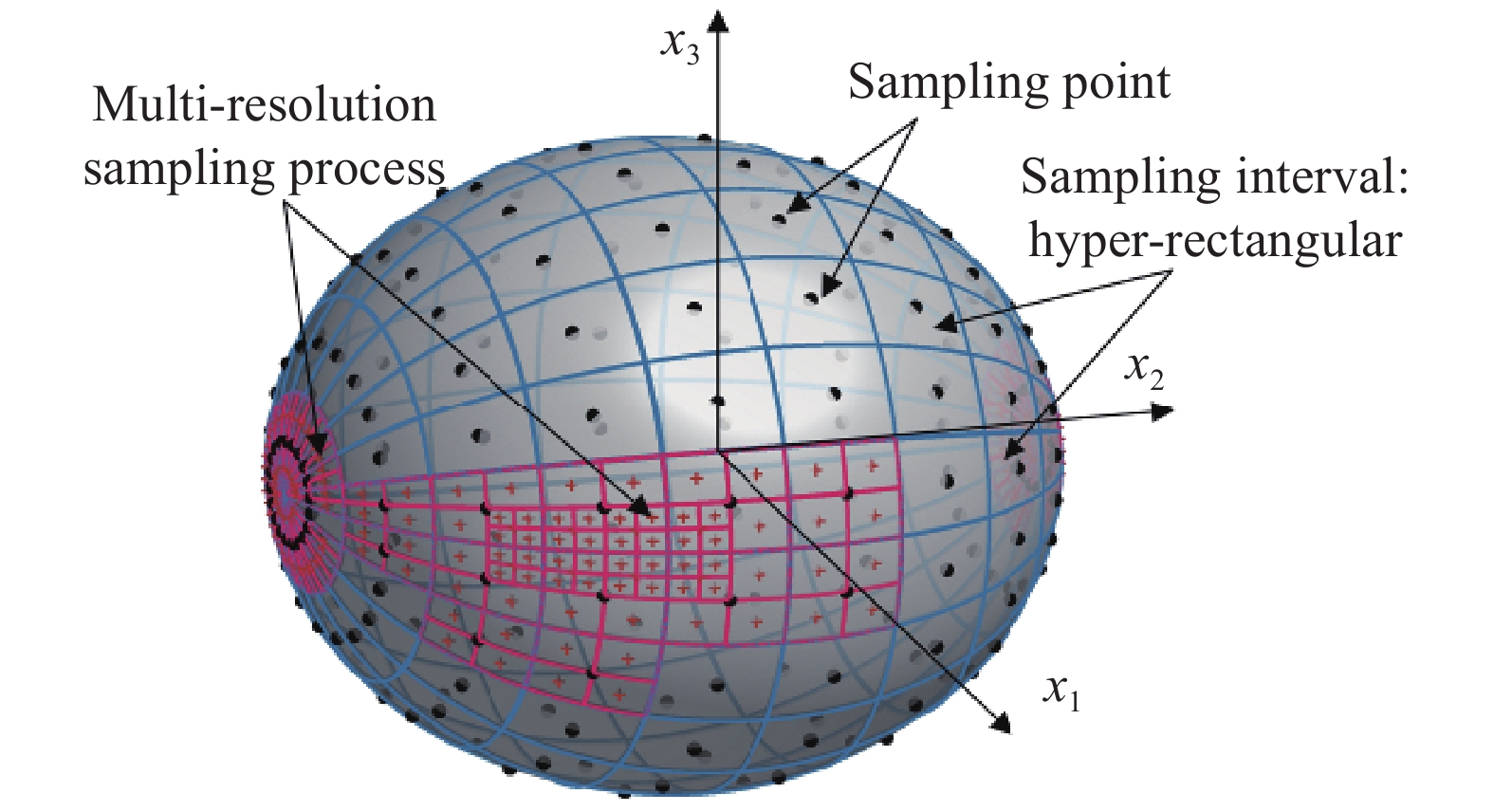

Fig 3
Relationship between convergence rate and DOA"
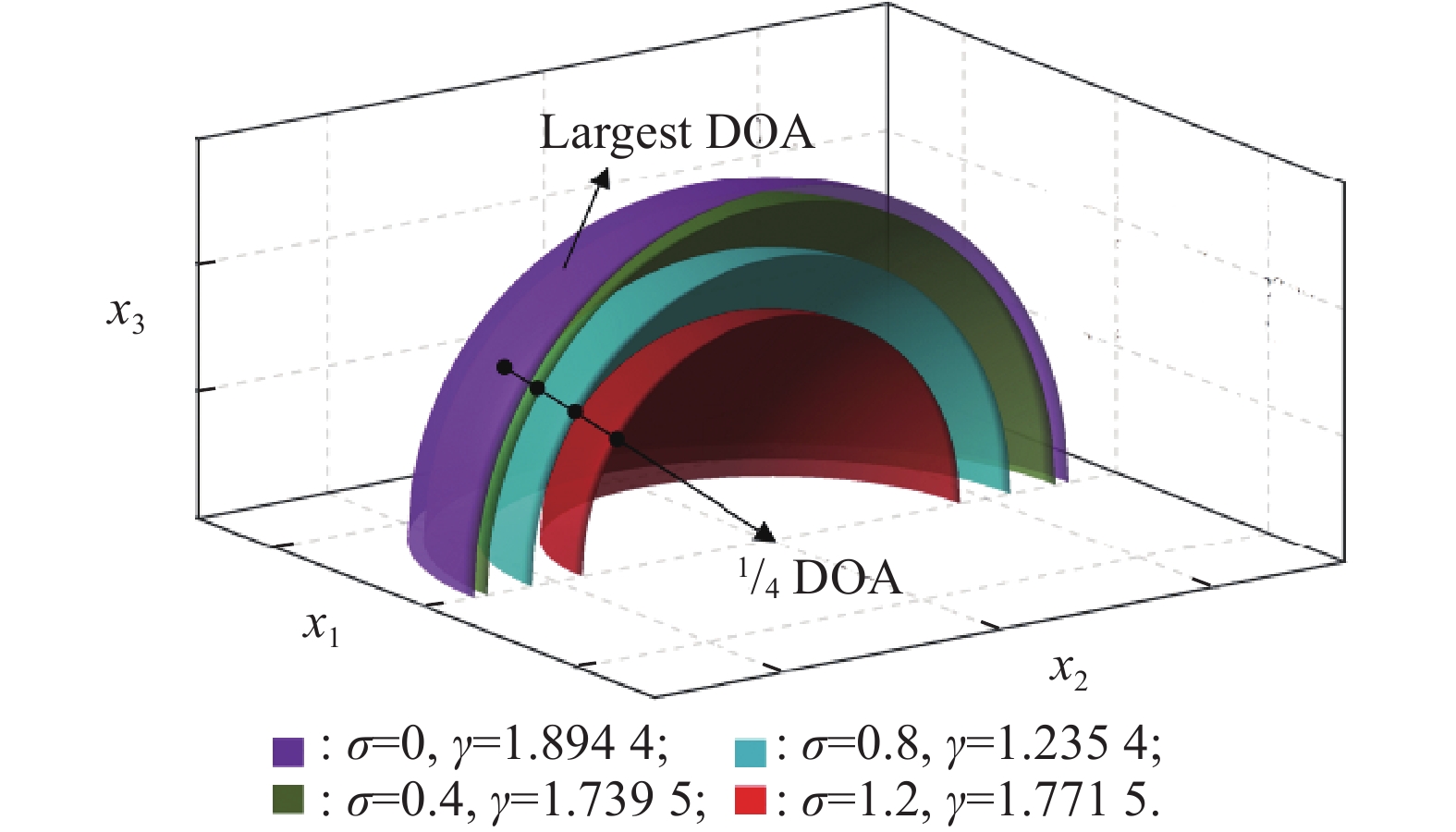

Fig 4
Frame of the proposed RLMPC"
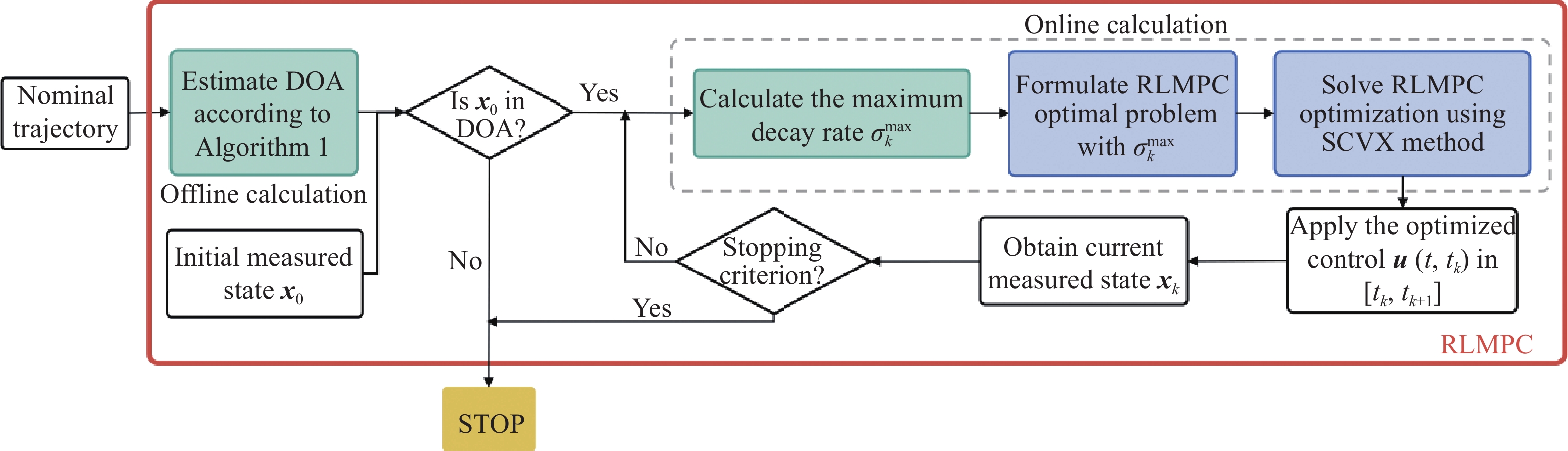

Fig 5
The eight-shaped periodic orbit around the asteroid"
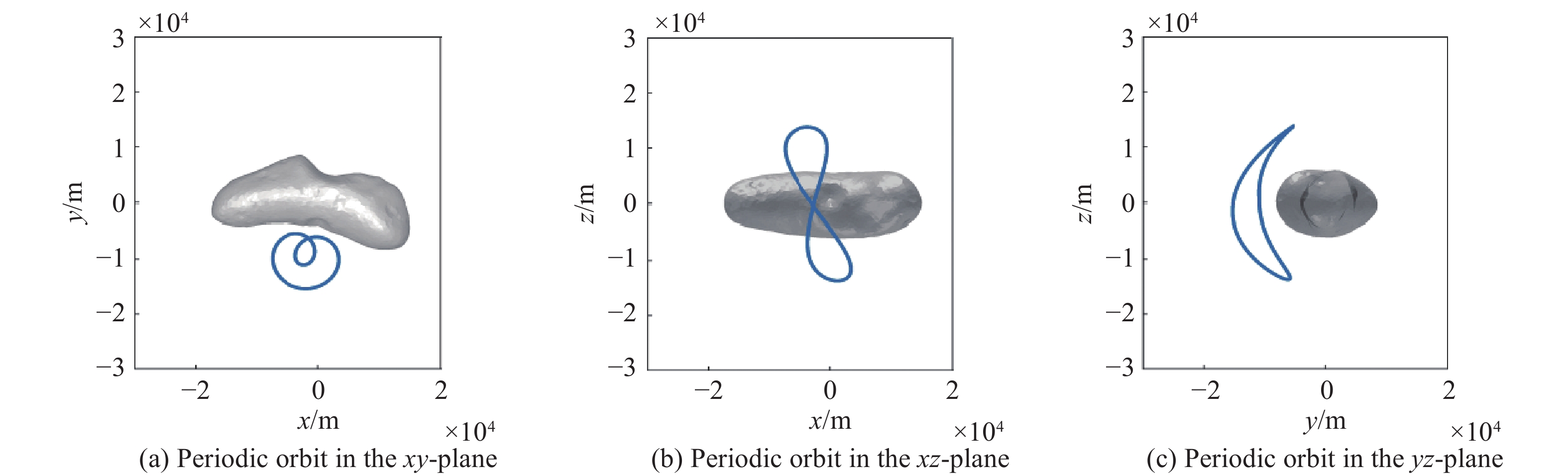
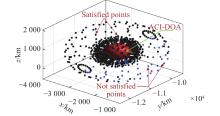
Fig 6
The process of the ACI-DOA estimation for a discrete point"
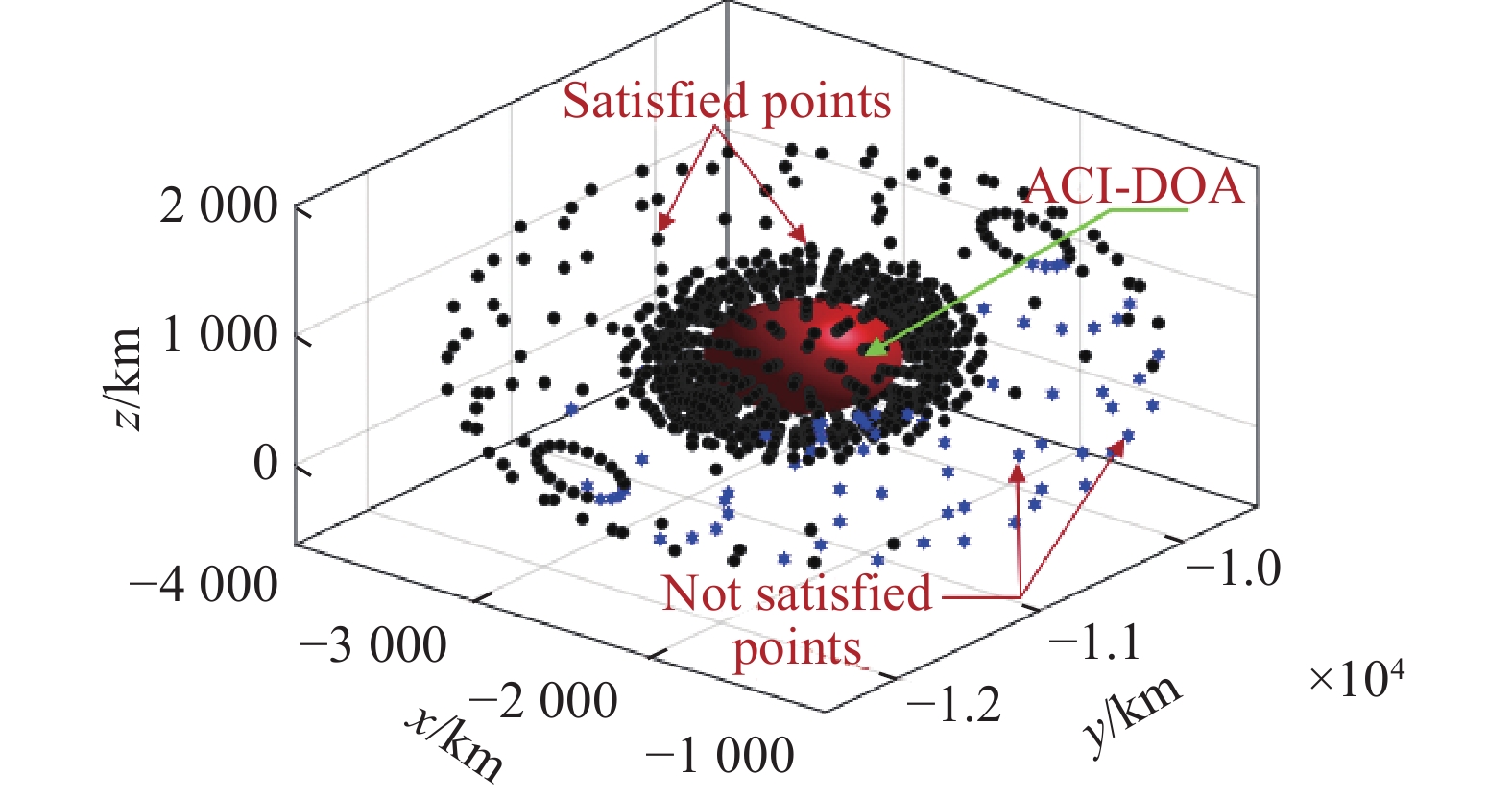

Fig 7
Estimation results of stable domains for RLMPC and LMPC"
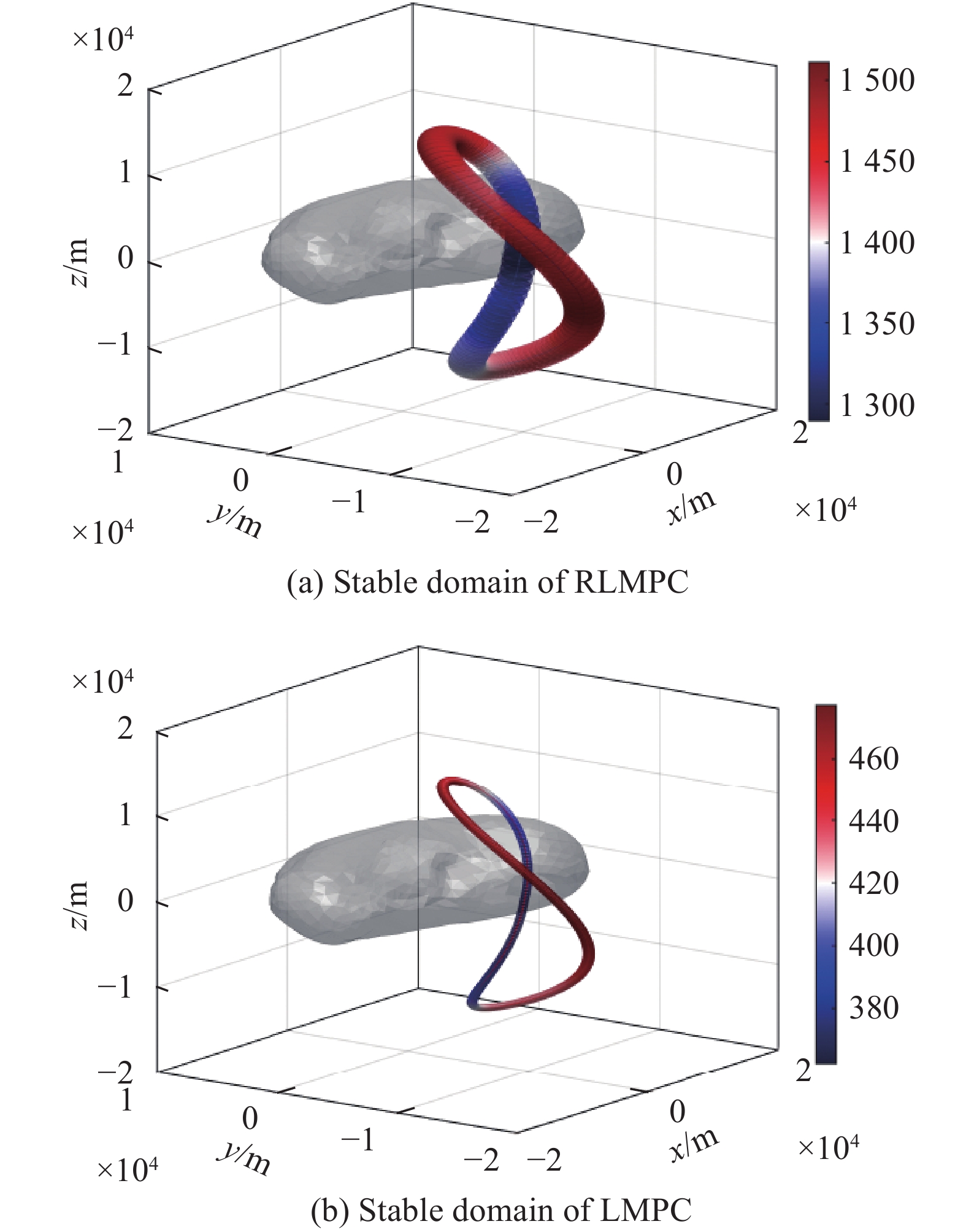

Fig 8
Trajectory tracking results of different control methods in Case 1"
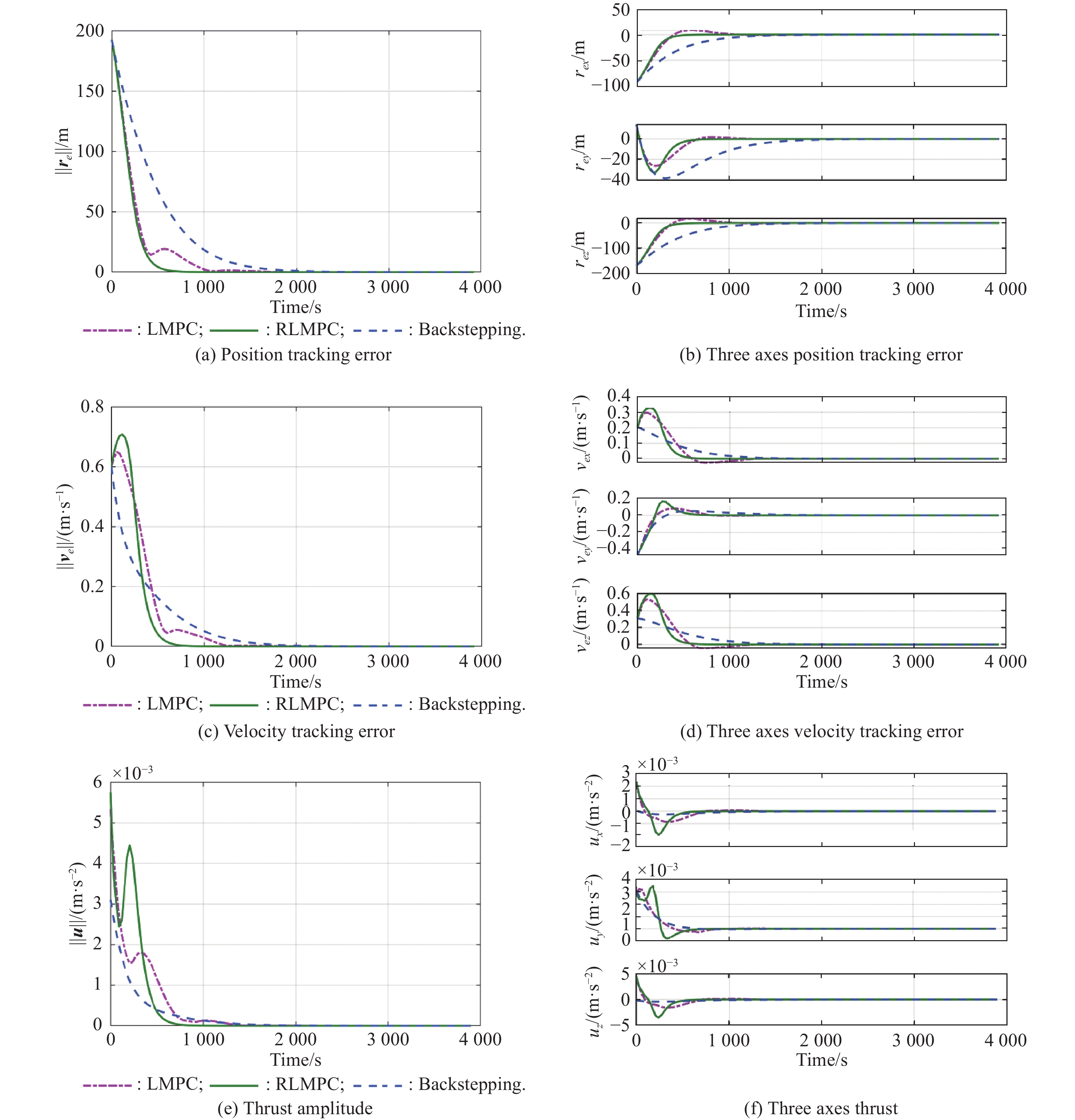

Fig 9
Trajectory tracking results of different control methods in Case 2"
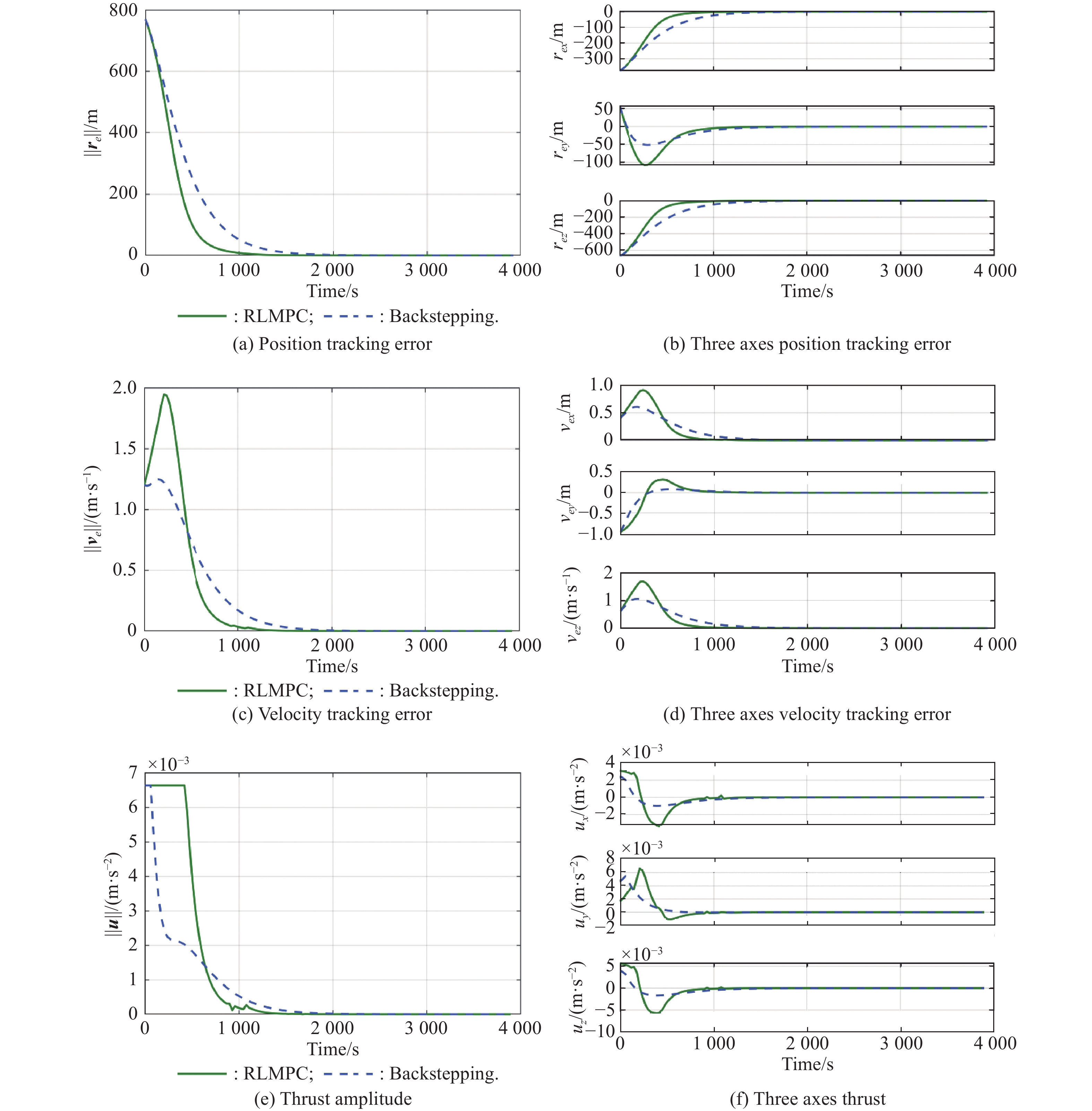
Fig 10
Position and velocity tracking errors of RLMPC with different values of ${{\boldsymbol{\sigma}} _{{\bf{user}}}}$"
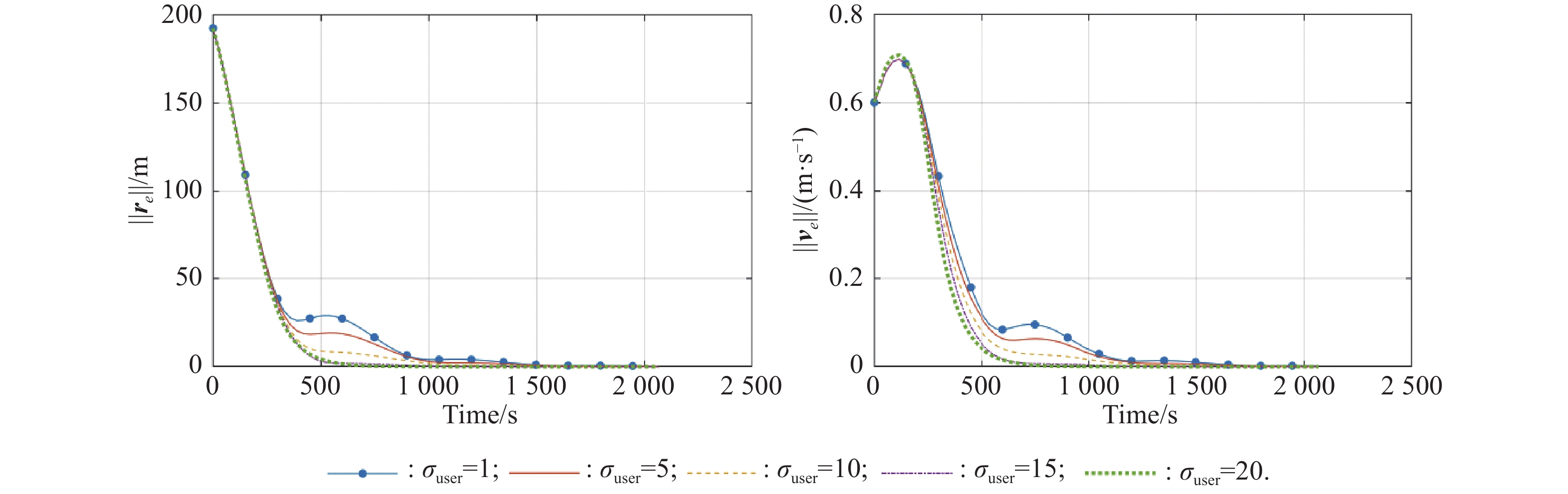
Table 1
Convergence time and control effort of RLMPC with different values of ${{\boldsymbol{\sigma}} _{{\bf{user}}}}$"
| Maximum convergence rate | Convergence time/s | Improvement/% | Control effort/(m/s) | Improvement/% |
| − | 1.60 | − | ||
| 15.87 | 1.55 | 3.13 | ||
| 30.16 | 1.49 | 6.88 | ||
| 987.94 | 47.62 | 1.44 | 10.00 | |
| 718.50 | 61.90 | 1.43 | 10.63 | |
| 808.25 | 57.15 | 1.53 | 4.38 | |
| 834.01 | 55.78 | 1.71 | − | |
| 868.13 | 53.97 | 1.82 | − |
Fig 11
Position tracking errors of the RLMPC method"
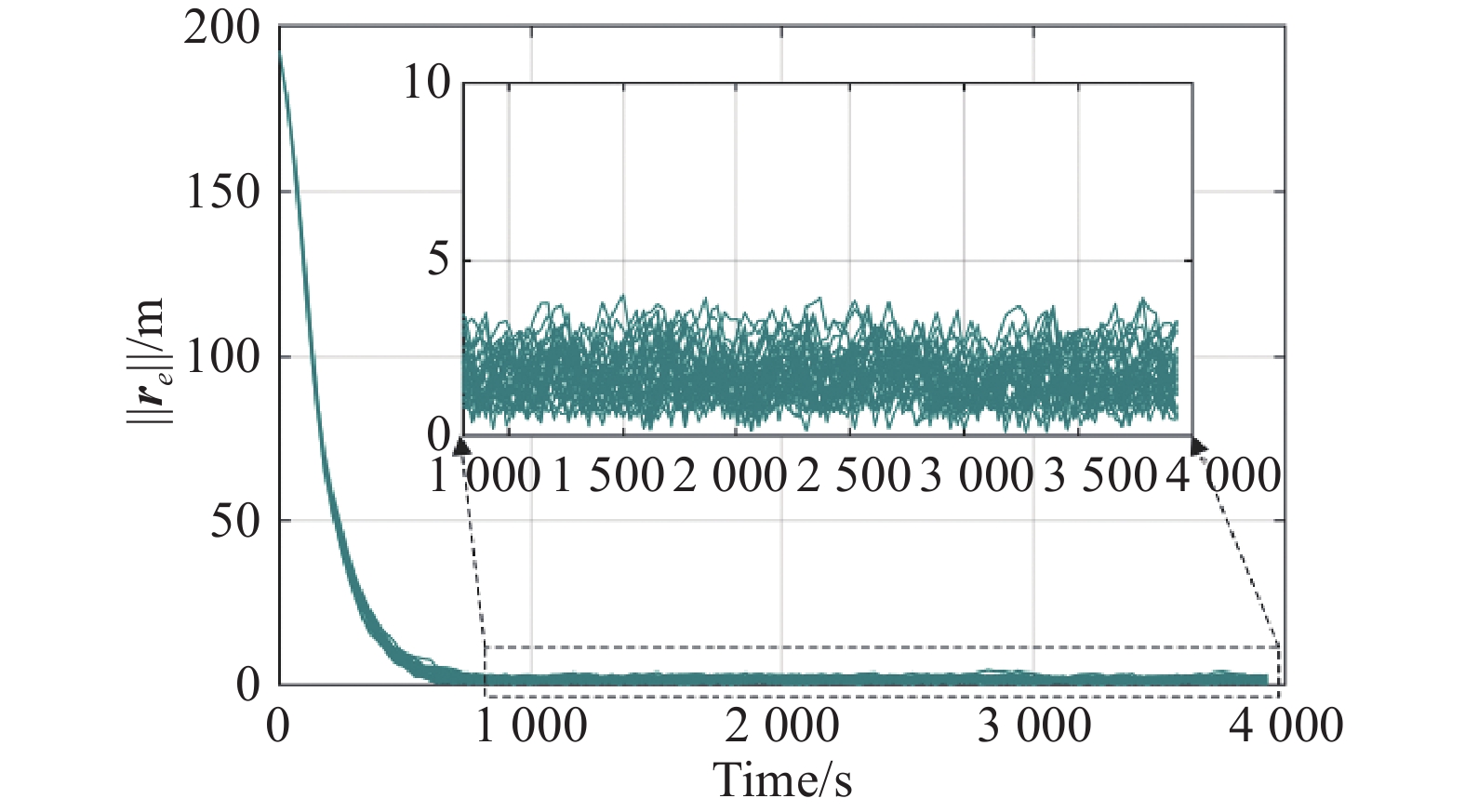
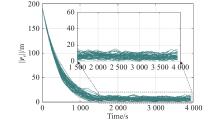
Fig 12
Position tracking errors of the LMPC method"
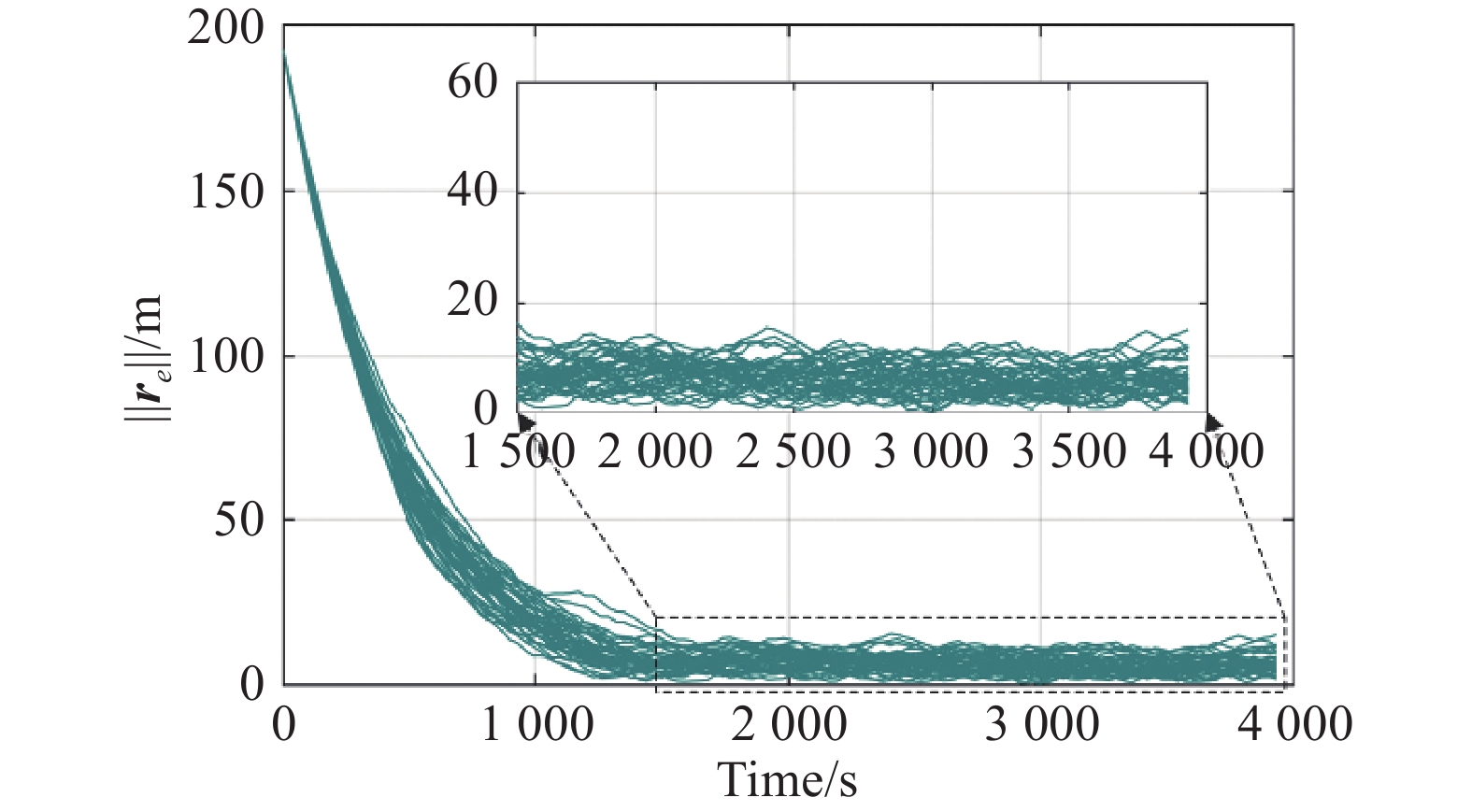
Table 2
Comparison of trajectory tracking under uncertainties with different controllers"
| Results | Statistic | LMPC | RLMPC | Improvement/% |
| Position error/m | Maximum value | 13.88 | 3.06 | − |
| Minimum value | 1.84 | 0.58 | − | |
| Mean value | 7.38 | 1.65 | 77.64 | |
| Control effort/(m/s) | Maximum value | 2.67 | 2.81 | − |
| Minimum value | 2.29 | 2.46 | − | |
| Mean value | 2.40 | 2.63 | − | |
| Convergence time/s | Maximum value | 728.23 | − | |
| Minimum value | 937.41 | − | ||
| Mean value | 849.66 | 41.53 |
| 1 |
TAKAHASHI S, SCHEERES D J Autonomous exploration of a small near-earth asteroid. Journal of Guidance, Control, and Dynamics, 2021, 44 (4): 701- 718.
doi: 10.2514/1.G005733 |
| 2 |
WEI B W, SHANG H B Global gravity field modeling of small bodies with heterogeneous mass distributions. Journal of Guidance, Control, and Dynamics, 2022, 45 (2): 248- 261.
doi: 10.2514/1.G005945 |
| 3 |
SAITO J, MIYAMOTO H, NAKAMURA R, et al Detailed images of asteroid 25143 Itokawa from Hayabusa. Science, 2006, 312 (5778): 1341- 1344.
doi: 10.1126/science.1125722 |
| 4 |
MILLER J K, KONOPLIV A, ANTREASIAN P, et al Determination of shape, gravity, and rotational state of asteroid 433 Eros. Icarus, 2002, 155 (1): 3- 17.
doi: 10.1006/icar.2001.6753 |
| 5 |
ACCOMAZZO A, FERRI P, LODIOT S, et al Rosetta operations at the comet. Acta Astronautica, 2015, 115, 434- 441.
doi: 10.1016/j.actaastro.2015.06.009 |
| 6 |
WILLIAMS B, ANTREASIAN P, CARRANZA E, et al OSIRIS-REx flight dynamics and navigation design. Space Science Reviews, 2018, 214 (69): 1- 43.
doi: 10.1007/s11214-017-0435-8 |
| 7 |
LI X Y, WARIER R R, SANYAL A K, et al Trajectory tracking near small bodies using only attitude control. Journal of Guidance, Control, and Dynamics, 2019, 42 (1): 109- 122.
doi: 10.2514/1.G003653 |
| 8 |
SANCHEZ J C, VAZQUEZ R, BIGGS J D, et al Orbit-attitude predictive control in the vicinity of asteroids with in situ gravity estimation. Journal of Guidance, Control, and Dynamics, 2022, 45 (2): 262- 279.
doi: 10.2514/1.G005572 |
| 9 |
SHI Y, WANG Y, MISRE A K, et al Station-keeping for periodic orbits near strongly perturbed binary asteroid systems. Journal of Guidance, Control, and Dynamics, 2020, 43 (2): 319- 326.
doi: 10.2514/1.G004638 |
| 10 |
BATISTA N R, PRADO A F Autonomous and robust orbit-keeping for small-body missions. Journal of Guidance, Control, and Dynamics, 2022, 45 (3): 587- 598.
doi: 10.2514/1.G005863 |
| 11 |
XIA Y Q, SUN Z Q, DAI L, et al Differential flatness ADRC for high-speed steering of tracked tank systems. Journal of Systems Engineering and Electronics, 2025, 36 (6): 1665- 1678.
doi: 10.23919/JSEE.2023.000046 |
| 12 |
TANIGUCHI A, SATOH S, YAMADA K Simultaneous learning optimization of hamiltonian systems and trajectory tracking around an asteroid. Journal of Guidance, Control, and Dynamics, 2020, 43 (2): 222- 231.
doi: 10.2514/1.G004533 |
| 13 |
CUI P, GAO C S, AN R M Fault-observer-based iterative learning model predictive controller for trajectory tracking of hypersonic vehicles. Journal of Systems Engineering and Electronics, 2025, 36 (3): 803- 813.
doi: 10.21629/jsee.2017.01.13 |
| 14 | CARSON J, ACIKMESE A. A model-predictive control technique with guaranteed resolvability and required thruster silent times for small-body proximity operations. Proc. of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2006: 6780. |
| 15 |
ALANDIHALLAJ M, ASSADIAN N Asteroid precision landing via probabilistic multiple-horizon multiple-model predictive control. Acta Astronautica, 2019, 161, 531- 541.
doi: 10.1016/j.actaastro.2019.04.009 |
| 16 |
HE D F, LUO J, LIN D, et al Flexible predictive power-split control for battery-supercapacitor systems of electric vehicles using IVHS. Journal of Systems Engineering and Electronics, 2023, 34 (1): 224- 235.
doi: 10.23919/JSEE.2023.000013 |
| 17 |
FREKHAUG T A, SANJURJO-RIVO M, SOLER M Output-feedback tube model predictive control for asteroid circumnavigation and descent. Journal of Guidance, Control, and Dynamics, 2023, 46 (11): 2235- 2244.
doi: 10.2514/1.G007522 |
| 18 |
MAYNE D Q, RAWLINGS J B, RAO C V, et al Constrained model predictive control: stability and optimality. Automatica, 2000, 36 (6): 789- 814.
doi: 10.1016/S0005-1098(99)00214-9 |
| 19 | MHASKAR P, EL-FARRA N H, CHRISTOFIDES P D Stabilization of nonlinear systems with state and control constraints using Lyapunov-based predictive control. Systems & Control Letters, 2006, 55 (8): 650- 659. |
| 20 | MHASKAR P, EL-FARRA N H, CHRISTOFIDES P D Predictive control of switched nonlinear systems with scheduled mode transitions. IEEE Trans. on Automatic Control, 2005, 50 (1): 1670- 1680. |
| 21 | SHEN C, SHI Y, BUCKHAM B Trajectory tracking control of an autonomous underwater vehicle using Lyapunov-based model predictive control. IEEE Trans. on Industrial Electronics, 2017, 65 (7): 5796- 5805. |
| 22 |
GONG P, YAN Z P, ZHANG W, et al Lyapunov-based model predictive control trajectory tracking for an autonomous underwater vehicle with external disturbances. Ocean Engineering, 2021, 232, 109010.
doi: 10.1016/j.oceaneng.2021.109010 |
| 23 | KHALIL H K. Nonlinear systems. Upper Saddle River, NJ: Prentice Han, 1991. |
| 24 | MULLER M A, ANGELI D, ALLGOWER F On necessity and robustness of dissipativity in economic model predictive control. IEEE Trans. on Automatic Control, 2014, 60 (6): 1671- 1676. |
| 25 |
TANG W, DAOUTIDIS P A bilevel programming approach to the convergence analysis of control-Lyapunov functions. IEEE Trans. on Automatic Control, 2019, 64 (10): 4174- 4179.
doi: 10.1109/TAC.2019.2892386 |
| 26 |
BOBITI R, LAZAR M Automated sampling-based stability verification and DOA estimation for nonlinear systems. IEEE Trans. on Automatic Control, 2018, 63 (11): 3659- 3674.
doi: 10.1109/TAC.2018.2797196 |
| 27 | RUMP S M. INTLAB-interval laboratory. Developments in reliable computing. Dordrecht: Springer Netherlands, 1999. |
| 28 | BLANCHINI F, MIANI S. Set-theoretic methods in control. Boston: Birkhäuser, 2008. |
| 29 | ZHANG J L, LI J, YE J K, et al Online midcourse guidance method for intercepting high-speed gliding target. Journal of Systems Engineering and Electronics, 2025, 36 (5): 1374- 1388. |
| 30 |
PINSON R M, LU P Trajectory design employing convex optimization for landing on irregularly shaped asteroids. Journal of Guidance, Control, and Dynamics, 2018, 41 (6): 1243- 1256.
doi: 10.2514/1.G003045 |
| 31 | MOSEK A. The MOSEK Optimization Toolbox for MATLAB Manual. https://www.mosek.com. |
| 32 | WERNER R A, SCHEERES D J Exterior gravitation of a polyhedron derived and compared with harmonic and mascon gravitation representations of asteroid 4769 Castalia. Celestial Mechanics and Dynamical Astronomy, 1996, 65 (3): 313- 344. |
| 33 |
SHANG H B, WU X Y, REN Y, et al An efficient algorithm for global periodic orbits generation near irregular-shaped asteroids. Communications in Nonlinear Science and Numerical Simulation, 2017, 48, 550- 568.
doi: 10.1016/j.cnsns.2017.01.021 |
| [1] |
Zhaoying LI, Shuai SHI, Hao LIU.
Trajectory tracking of tail-sitter aircraft by |
| [2] | Yuechen HUANG, Haiyang LI, Hongxin SHEN. Optimal feedback based control for Mars entry trajectory tracking [J]. Journal of Systems Engineering and Electronics, 2018, 29(1): 134-141. |
| [3] | Zhang Yan, Qu Weidong, Xi Yugeng & Cai Zili. Stabilization and trajectory tracking of autonomous airship’s planar motion [J]. Journal of Systems Engineering and Electronics, 2008, 19(5): 974-981. |
| [4] | Tang Qiang, Zhang Xinguo' & Liu Xicheng. TF/TA2 trajectory tracking using nonlinear predictive control approach [J]. Journal of Systems Engineering and Electronics, 2006, 17(2): 396-401. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||