
Journal of Systems Engineering and Electronics ›› 2026, Vol. 37 ›› Issue (3): 1019-1029.doi: 10.23919/JSEE.2026.000125
• CONTROL THEORY AND APPLICATION • Previous Articles
Yiheng LI1( ), Wenjie ZHANG2,*(), Mingkai WANG3(), Qunli XIA1(), Yangxin LIU1()
), Wenjie ZHANG2,*(), Mingkai WANG3(), Qunli XIA1(), Yangxin LIU1()
Received:2024-12-12
Online:2026-06-18
Published:2026-06-29
Contact:
Wenjie ZHANG
E-mail:YIHENGLI727@163.com;l013763956@qq.com;wangmk@buaa.edu.cn;1010@bit.edu.cn;1459518359@qq.com
Yiheng LI, Wenjie ZHANG, Mingkai WANG, Qunli XIA, Yangxin LIU. Fault-tolerant control of hypersonic morphing vehicle based on the predefined-time disturbance observer[J]. Journal of Systems Engineering and Electronics, 2026, 37(3): 1019-1029.
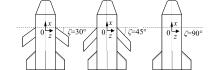
Fig 1
Schematic diagram of the HMV configuration"
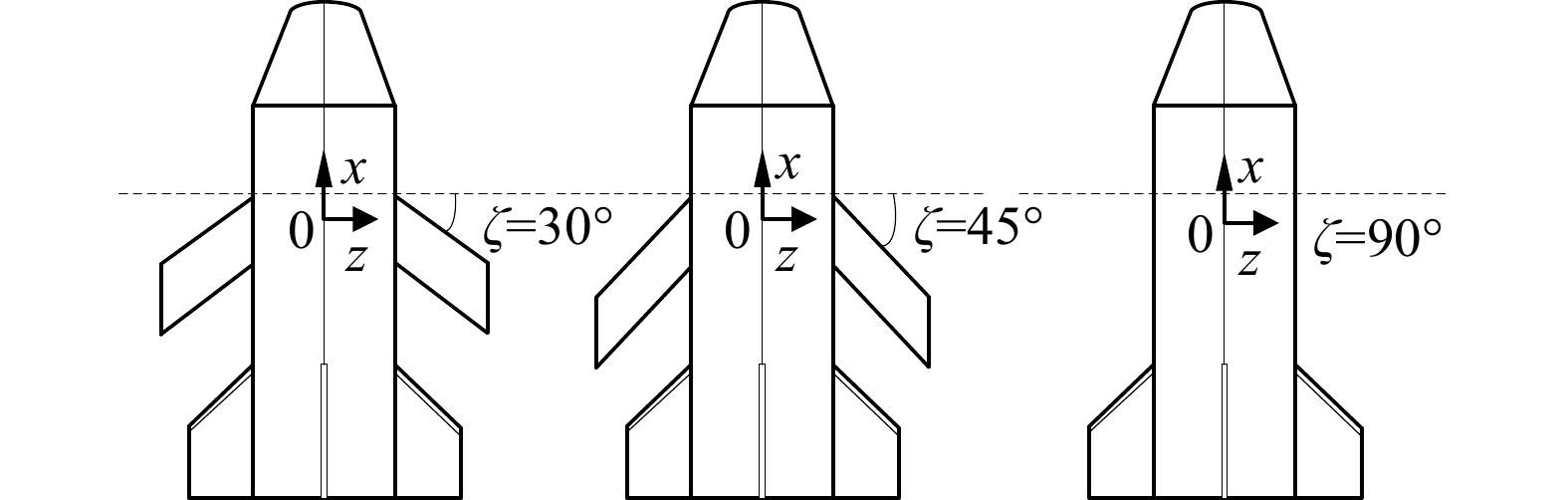

Fig 2
Controllor scheme"
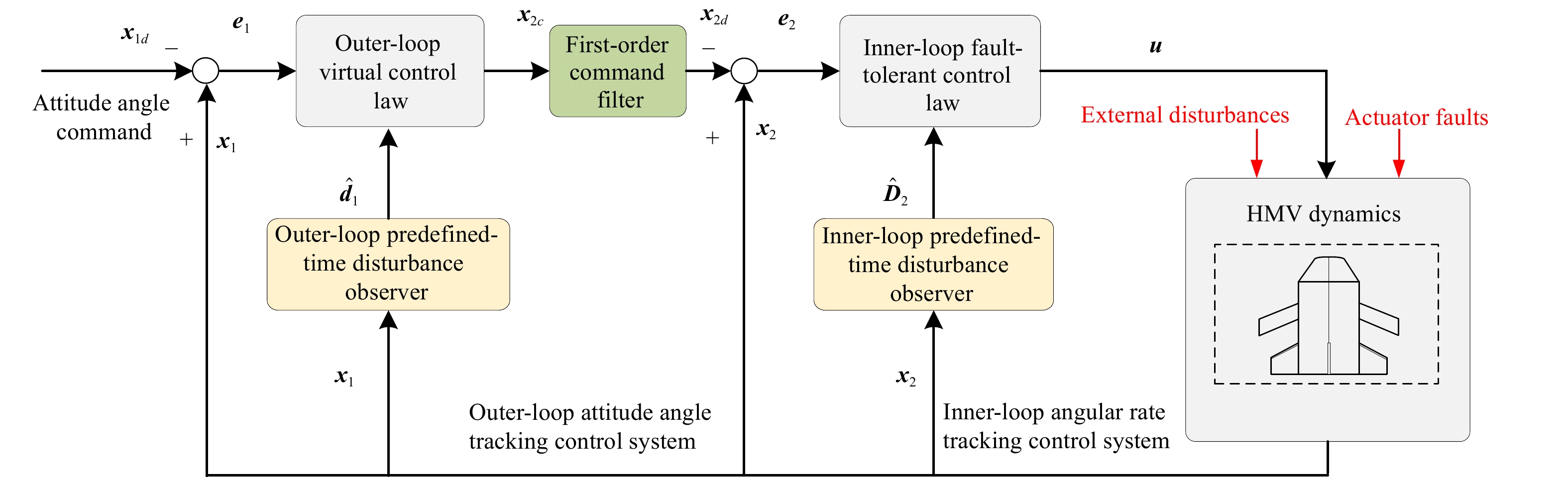
Fig 3
Attitude angle tracking curve"
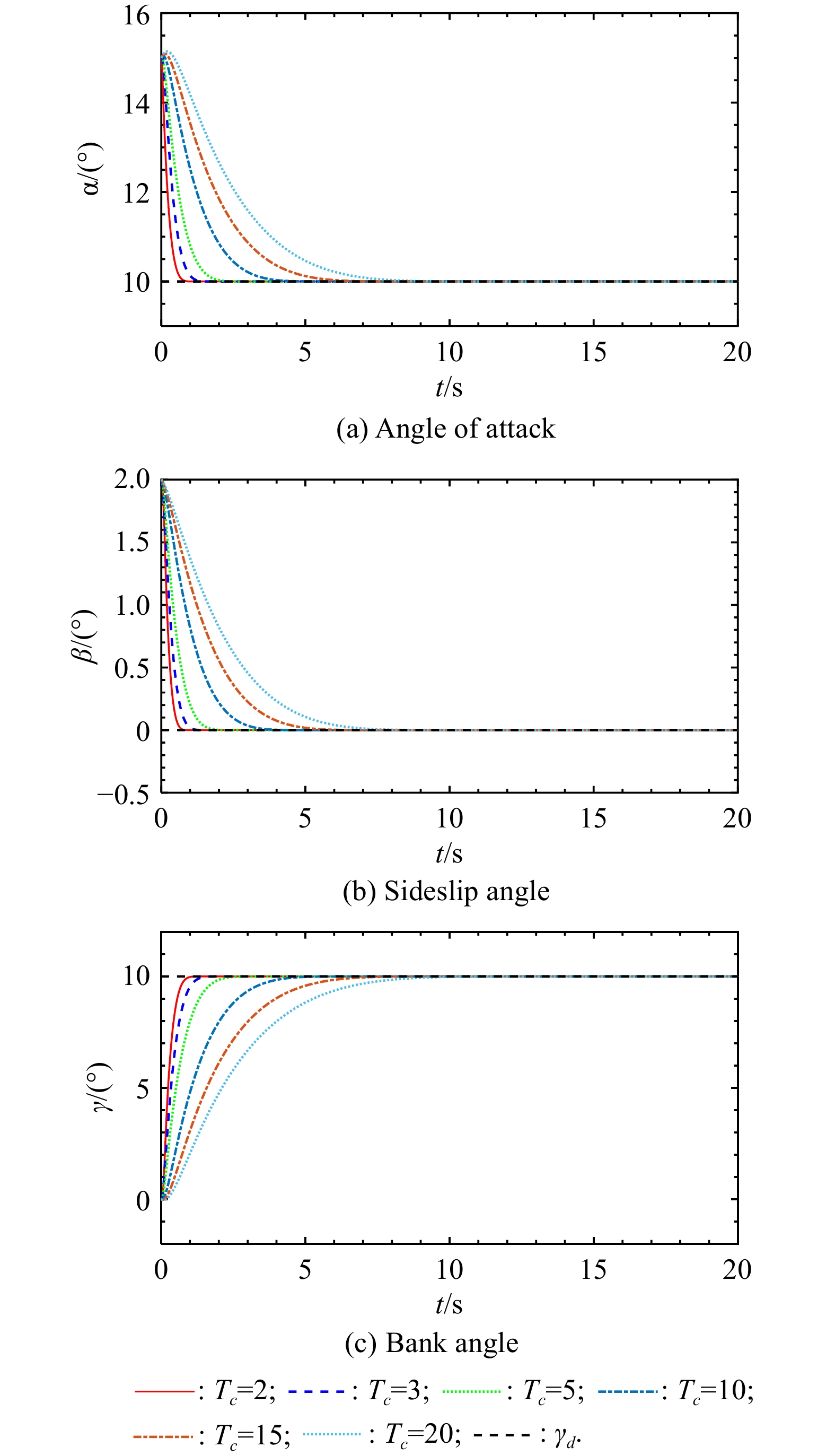
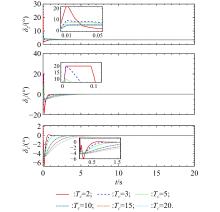
Fig 4
Control input"
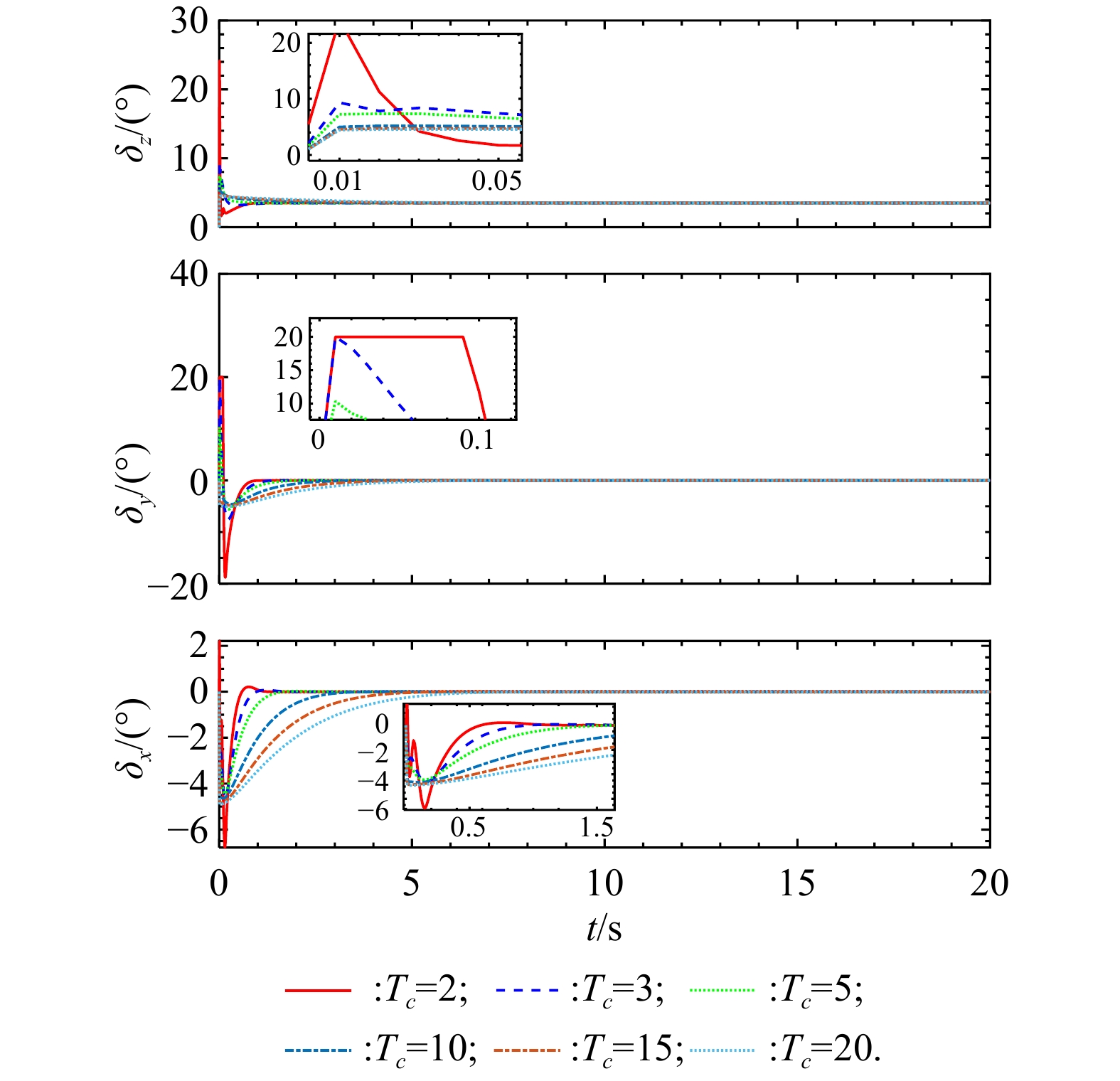
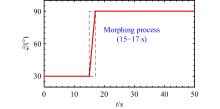
Fig 5
Curve of sweep angle"
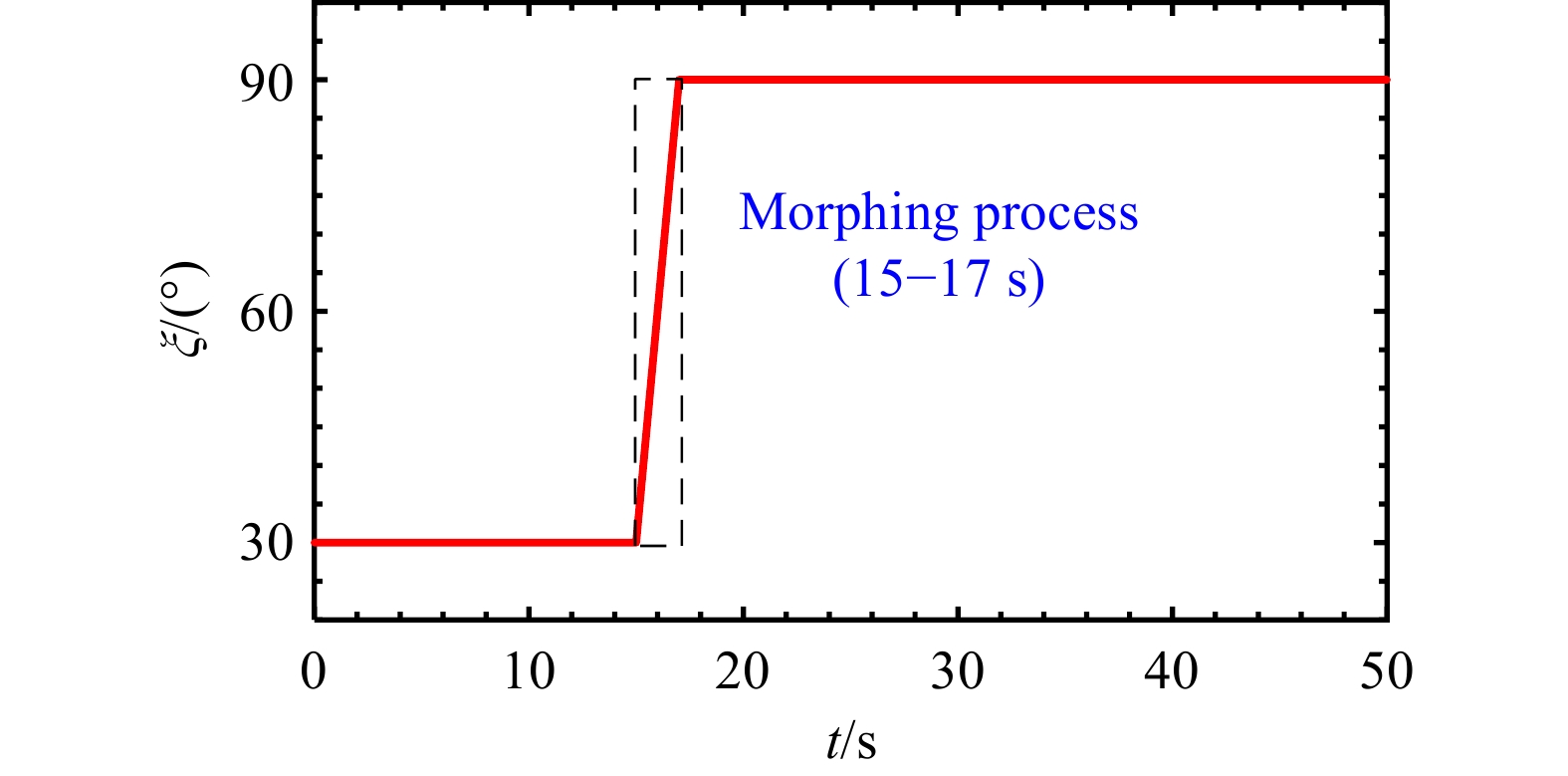

Fig 6
Attitude angle tracking response"
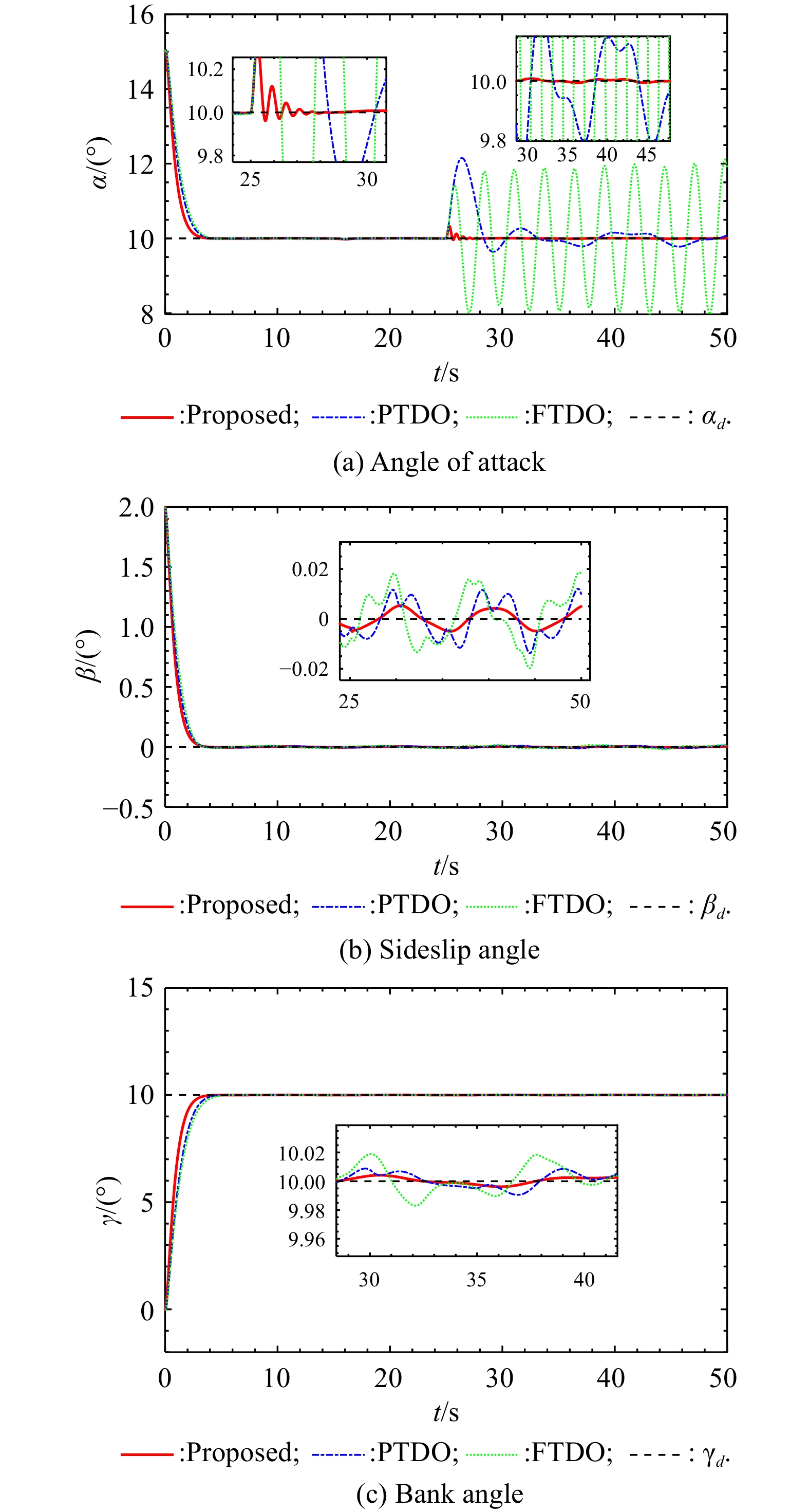

Fig 7
Tracking error of the attitude angle"
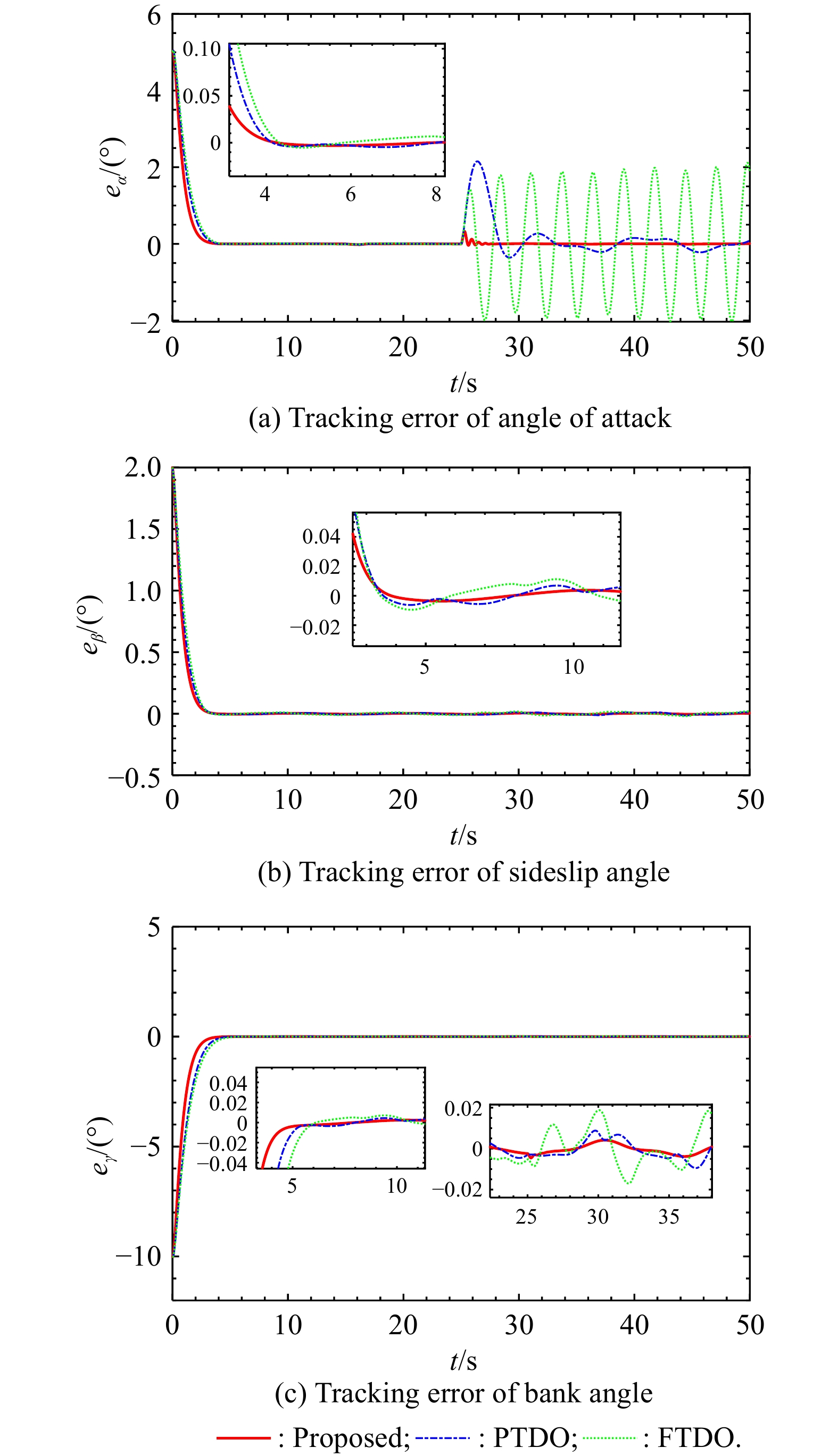
Fig 8
Attitude angular rate curve"
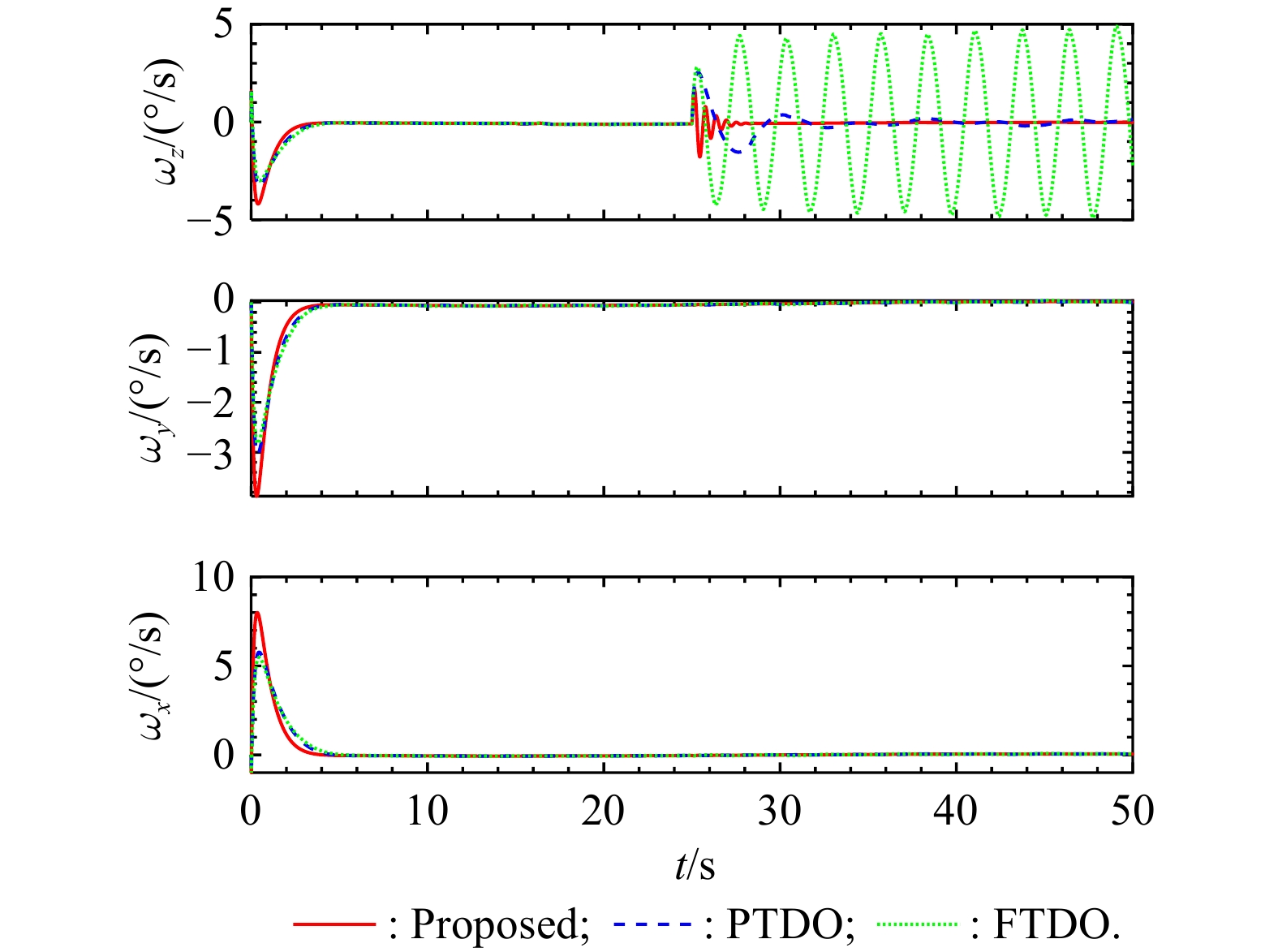
Fig 9
Control input"
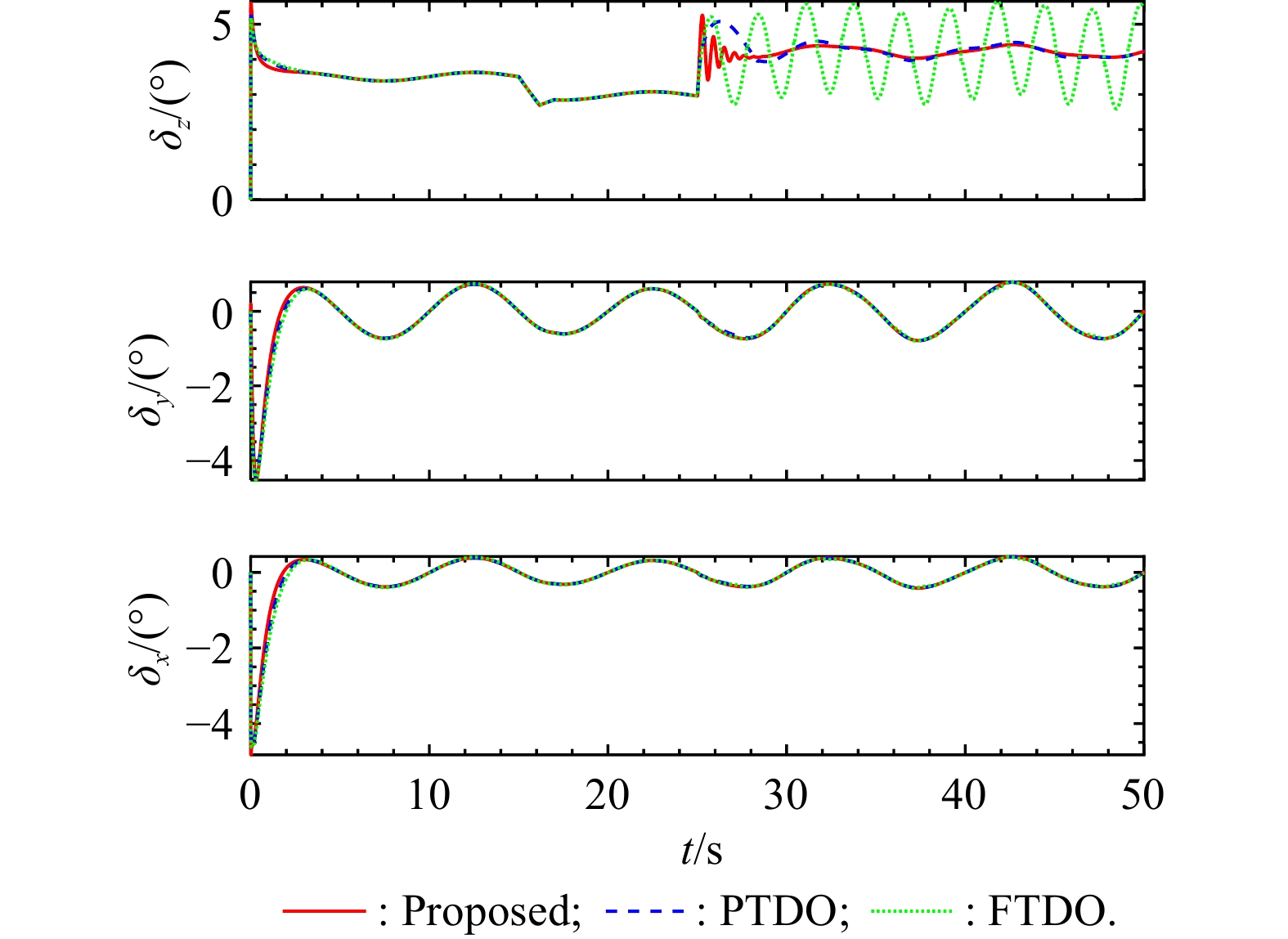
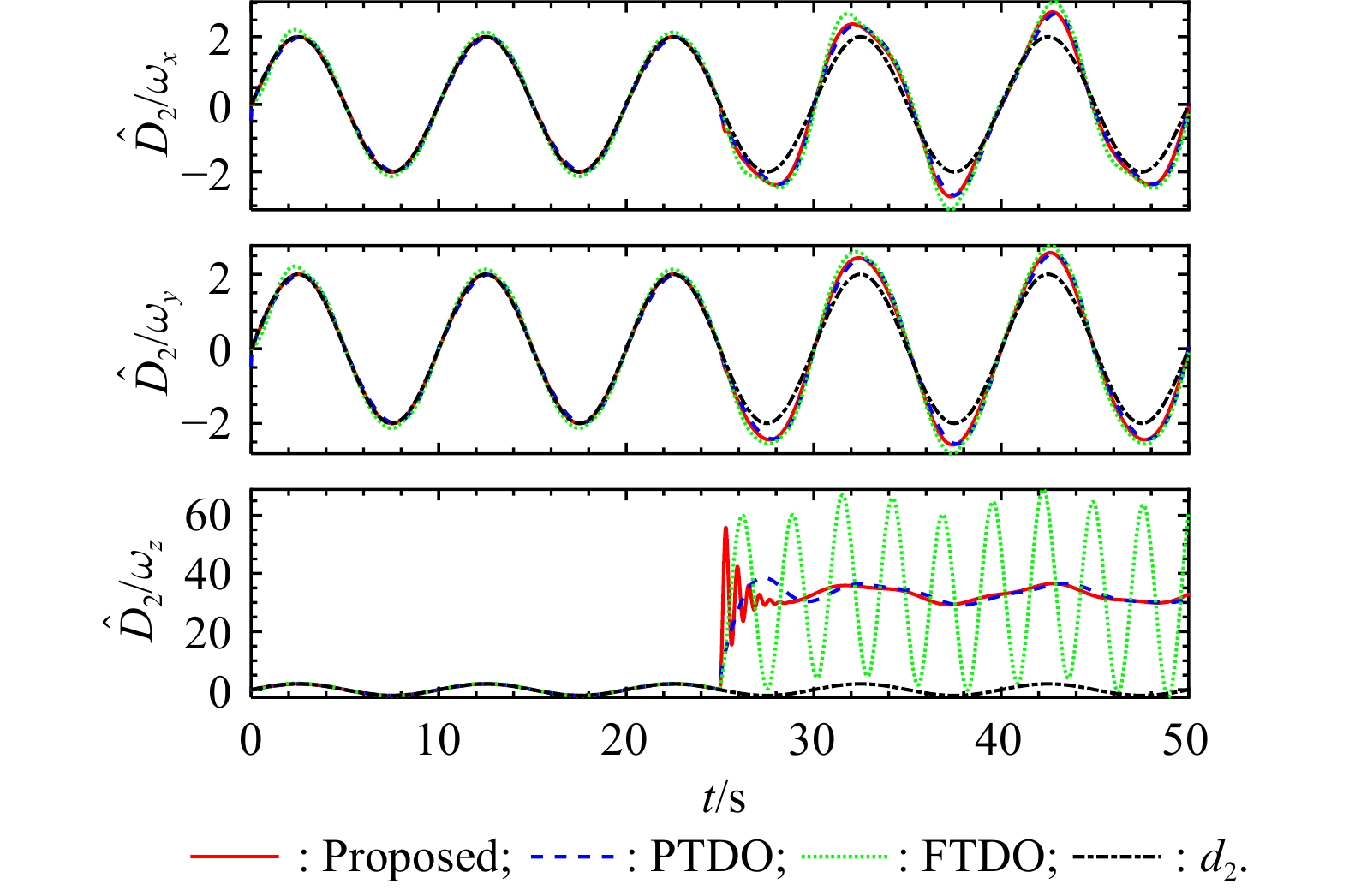
Fig 10
Outer-loop disturbance estimation value"
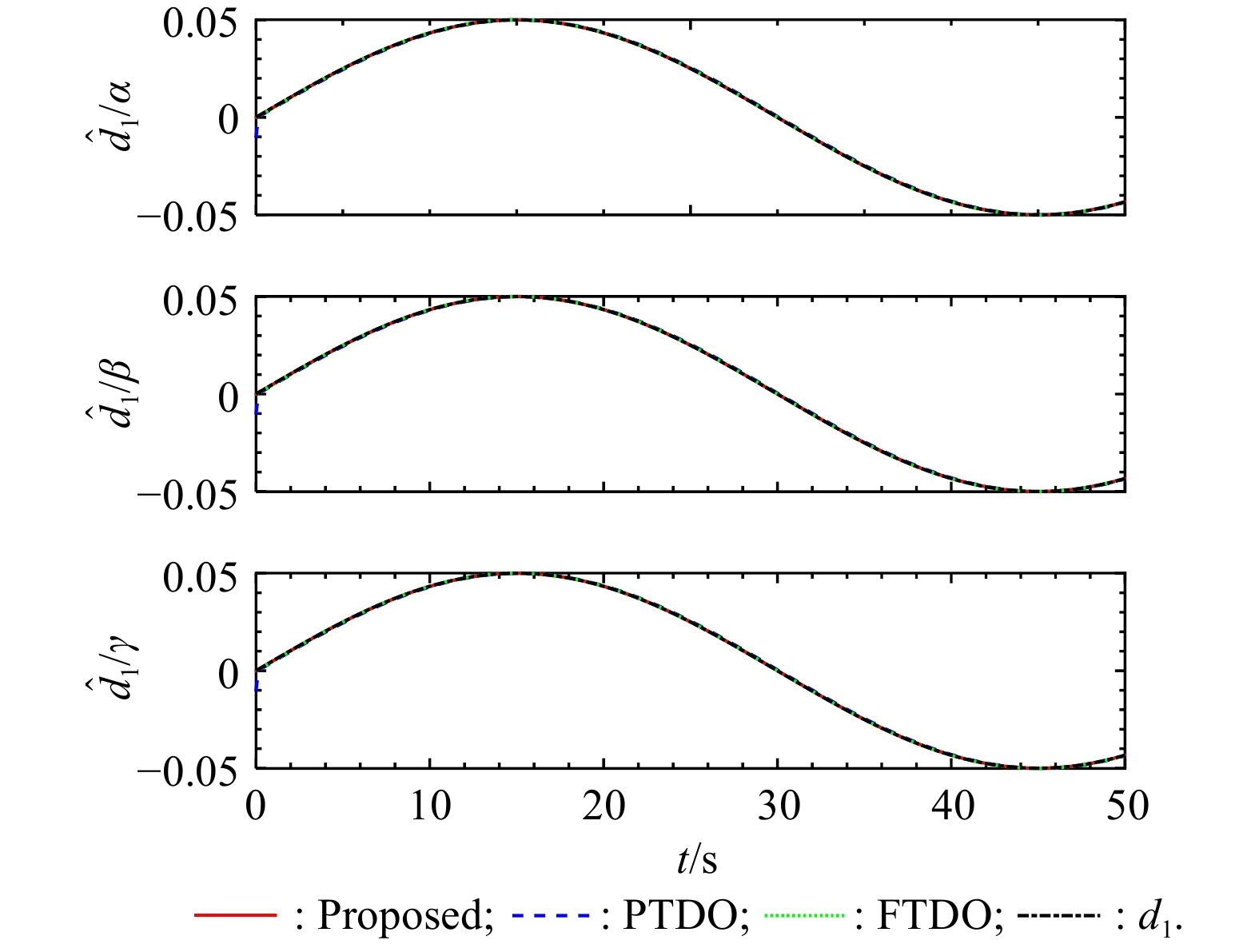
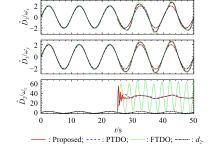
Fig 11
Inner-loop disturbance estimation value"
| 1 |
BAO C Y, WANG P, TANG G J Integrated method of guidance, control and morphing for hypersonic morphing vehicle in glide phase. Chinese Journal of Aeronautics, 2021, 34 (5): 535- 553.
doi: 10.1016/j.cja.2020.11.009 |
| 2 |
DONG C Y, LIU C, WANG Q, et al Switched adaptive active disturbance rejection control of variable structure near space vehicles based on adaptive dynamic programming. Chinese Journal of Aeronautics, 2019, 32 (7): 1684- 1694.
doi: 10.1016/j.cja.2019.03.009 |
| 3 |
DAI P, FENG D Z, ZHAO J Q, et al Asymmetric integral barrier Lyapunov function based dynamic surface control of a state-constrained morphing waverider with anti-saturation compensator. Aerospace Science and Technology, 2022, 131, 107975.
doi: 10.1016/j.ast.2022.107975 |
| 4 |
CHU L, LI Q, GU F, et al Design, modeling, and control of morphing aircraft: a review. Chinese Journal of Aeronautics, 2022, 35 (5): 220- 246.
doi: 10.1016/j.cja.2021.09.013 |
| 5 |
YAN B B, LI Y, DAI P, et al Aerodynamic analysis, dynamic modeling, and control of a morphing aircraft. Journal of Aerospace Engineering, 2019, 32 (5): 04019058.
doi: 10.1061/(ASCE)AS.1943-5525.0001047 |
| 6 |
YUE T, WANG L X, AI J Q Gain self-scheduled H∞ control for morphing aircraft in the wing transition process based on an LPV model. Chinese Journal of Aeronautics, 2013, 26 (4): 909- 917.
doi: 10.1016/j.cja.2013.06.004 |
| 7 |
JIANG W L, WU K S, WANG Z L, et al Gain-scheduled control for morphing aircraft via switching polytopic linear parameter-varying systems. Aerospace Science and Technology, 2020, 107, 106242.
doi: 10.1016/j.ast.2020.106242 |
| 8 |
WU Q, LIU Z H, LIU F N, et al LPV-based self-adaption integral sliding mode controller with L2 gain performance for a morphing aircraft. IEEE Access, 2019, 7, 81515- 81531.
doi: 10.1109/ACCESS.2019.2923313 |
| 9 |
JIANG W L, DONG C Y, WANG Q A systematic method of smooth switching LPV controllers design for a morphing aircraft. Chinese Journal of Aeronautics, 2015, 28 (6): 1640- 1649.
doi: 10.1016/j.cja.2015.10.005 |
| 10 |
GONG L G, WANG Q, DONG C Y Disturbance rejection control of morphing aircraft based on switched nonlinear systems. Nonlinear Dynamics, 2019, 96 (2): 975- 995.
doi: 10.1007/s11071-019-04834-9 |
| 11 | LI Y H, LIU D W, ZHOU H, et al. Adaptive backstepping control of morphing aircraft based on RBF neural networks. Proc. of the International Symposium on Aerospace Engineering and Systems 2023: 195−201. |
| 12 |
WU Z H, LU J C, ZHOU Q, et al Modified adaptive neural dynamic surface control for morphing aircraft with input and output constraints. Nonlinear Dynamics, 2017, 87 (4): 2367- 2383.
doi: 10.1007/s11071-016-3196-0 |
| 13 |
QIAO F X, SHI J P, QU X B, et al Adaptive back-stepping neural control for an embedded and tiltable V-tail morphing aircraft. International Journal of Control, Automation and Systems, 2022, 20 (2): 678- 690.
doi: 10.1007/s12555-020-0694-0 |
| 14 | XIE S Z, CHEN Q Predefined-time disturbance estimation and attitude control for rigid spacecraft. IEEE Trans. on Circuits and Systems II: Express Briefs, 2024, 71 (4): 2089- 2093. |
| 15 | CHEN J Y, ZHANG H C, XIAO B, et al Predefined-time observer-based nonsingular sliding-mode control for spacecraft attitude stabilization. IEEE Trans. on Circuits and Systems II: Express Briefs, 2024, 71 (3): 1291- 1295. |
| 16 | ZHANG H C, HUANG H W, XIAO B, et al Command-filtered incremental backstepping attitude control of spacecraft with predefined-time stability. Aerospace Science and Technology, 2024, 155 (1): 109552. |
| 17 |
LI H, YANG H S, LIU Z C Command filter-based adaptive predefined-time control for non-strict feedback nonlinear systems with unmodeled dynamics. Journal of the Franklin Institute, 2024, 361 (12): 106936.
doi: 10.1016/j.jfranklin.2024.106936 |
| 18 | SUN H B, LI S H, SUN C Y Finite time integral sliding mode control of hypersonic vehicle. Nonlinear Dynamics, 2013, 73 (1): 229- 424. |
| 19 |
SUN J L, YI J Q, PU Z Q, et al Adaptive fuzzy nonsmooth back-stepping output-feedback control for hypersonic vehicles with finite-time convergence. IEEE Trans. on Fuzzy Systems, 2020, 28 (10): 2320- 2034.
doi: 10.1109/TFUZZ.2019.2934934 |
| 20 |
TANG X N, ZHAI D, LI X J Adaptive fault-tolerance control based finite-time backstepping for hypersonic flight vehicle with full state constrains. Information Sciences, 2020, 507, 53- 66.
doi: 10.1016/j.ins.2019.08.012 |
| 21 | POLYAKOV A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. on Automatic Control, 2012, 57(8): 2106–2110. |
| 22 |
WANG X, GUO J, TANG S J, et al Fixed-time disturbance observer based fixed-time back-stepping control for an air-breathing hypersonic vehicl. ISA Transactions, 2019, 88, 233- 245.
doi: 10.1016/j.isatra.2018.12.013 |
| 23 |
DONG Z H, LI Y H, LV M L Adaptive nonsingular fixed-time control for hypersonic flight vehicle considering angle of attack constraints. International Journal of Robust and Nonlinear Control, 2023, 33 (12): 6754- 6777.
doi: 10.1002/rnc.6722 |
| 24 |
ZHANG Y C, MA M C, YANG X Y, et al Disturbance-observer-based fixed-time control for 6-DOF spacecraft rendezvous and docking operations under full-state constraint. Acta Astronautica, 2023, 205, 225- 238.
doi: 10.1016/j.actaastro.2023.02.005 |
| 25 |
SUN J L, YI J Q, PU Z Q, et al Fixed-time sliding mode disturbance observer-based nonsmooth backstepping control for hypersonic vehicles. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2020, 50 (11): 4377- 4386.
doi: 10.1109/TSMC.2018.2847706 |
| 26 |
JIMÉNEZ-RODRÍGUEZ E, MUÑOZ-VÁZQUEZ A J, SÁNCHEZ-TORRES J D, et al A Lyapunov-like characterization of predefined-time stability. IEEE Trans. on Automatical Control, 2020, 65 (11): 4922- 4927.
doi: 10.1109/TAC.2020.2967555 |
| 27 | LU X Y, WANG J Y, WANG Y H, et al Neural network observer-based predefined-time attitude control for morphing hypersonic vehicles. Aerospace Science and Technology, 2024, 52, 109333. |
| 28 |
LIANG X H, WANG Q, XU B, et al Back-stepping fault-tolerant control for morphing aircraft based on fixed-time observer. International Journal of Control, Automation and Systems, 2021, 19 (12): 3924- 36.
doi: 10.1007/s12555-020-0764-3 |
| 29 | LI Y H, WANG M K, XIA Q L Back-stepping fault-tolerant control method of morphing aircraft based on fixed-time neural network observer. Journal of Aerospace Engineering, 2025, 38 (2): 04024119. |
| 30 |
JU X Z, WEI C Z, XU H C, et al Fractional-order sliding mode control with a predefined-time observer for VTVL reusable launch vehicles under actuator faults and saturation constraints. ISA Transactions, 2022, 129, 55- 72.
doi: 10.1016/j.isatra.2022.02.003 |
| 31 |
YUAN L H, WANG L D, XU J T Adaptive fault-tolerant controller for morphing aircraft based on the L2 gain and a neural network. Aerospace Science and Technology, 2023, 132, 107985.
doi: 10.1016/j.ast.2022.107985 |
| 32 |
XU S H, WEI C Z, ZHANG L T, et al Neural network based adaptive nonsingular practical predefined-time fault-tolerant control for hypersonic morphing aircraft. Chinese Journal of Aeronautics, 2024, 37 (4): 421- 435.
doi: 10.1016/j.cja.2023.12.020 |
| 33 |
LIANG S, XU B, ZHANG Y M Robust self-learning fault-tolerant control for hypersonic flight vehicle based on ADHDP. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2023, 53 (9): 5295- 5306.
doi: 10.1109/TSMC.2023.3264552 |
| 34 | ZHANG Y, HUANG W, LU K F, et al Modeling and finite-time control for the hypersonic morphing flight vehicle. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48 (10): 1979- 1993. |
| [1] | Hang GUO, Zheng WANG, Bin FU, Kang CHEN, Wenxing FU, Jie YAN. Impact angle constrained fuzzy adaptive fault tolerant IGC method for Ski-to-Turn missiles with unsteady aerodynamics and multiple disturbances [J]. Journal of Systems Engineering and Electronics, 2022, 33(5): 1210-1226. |
| [2] | Xuelian Yao, Gang Tao, and Ruiyun Qi. Adaptive actuator failure compensation and disturbance rejection scheme for spacecraft [J]. Journal of Systems Engineering and Electronics, 2014, 25(4): 648-. |
| [3] | Wei Wang and Changyun Wen. Adaptive failure compensation for uncertain systems with multiple inputs [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 70-76. |
| [4] | Gang Tao, Ruiyun Qi, and Chang Tan. A parameter estimation based adaptive actuator failure compensation control scheme [J]. Journal of Systems Engineering and Electronics, 2011, 22(1): 1-11. |
| [5] | Xiaodong Han1, 2,*, Jiangong Liu1, Dexiao Xie2, Dengfeng Zhang2, and Zhiquan Wan. Robust H∞ guaranteed cost satisfactory fault-tolerant control for discrete-time systems with quadratic D stabilizability [J]. Journal of Systems Engineering and Electronics, 2010, 21(3): 496-502. |
| [6] | Qixun Lan, Yuxiao Liu, Huawei Niu, and Jiarong Liang. Robust reliable guaranteed cost control for uncertain singular systems with time-delay [J]. Journal of Systems Engineering and Electronics, 2010, 21(1): 110-117. |
| [7] | Chen Jiaorong & Liu Fei. Robust reliable H∞ control for discrete-time Markov jump linear systems with actuator failures [J]. Journal of Systems Engineering and Electronics, 2008, 19(5): 965-973. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||