
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (3): 727-736.doi: 10.23919/JSEE.2022.000067
• CONTROL THEORY AND APPLICATION • Previous Articles Next Articles
Jing GUI, Heming ZHAO*( ), Xiang XU()
), Xiang XU()
Received:2021-04-20
Online:2022-06-18
Published:2022-06-24
Contact:
Heming ZHAO
E-mail:hemzhao@163.com;hsianghsu@163.com
About author:Supported by:Jing GUI, Heming ZHAO, Xiang XU. Heading constraint algorithm for foot-mounted PNS using low-cost IMU[J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 727-736.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Diagram of different coordinate system"
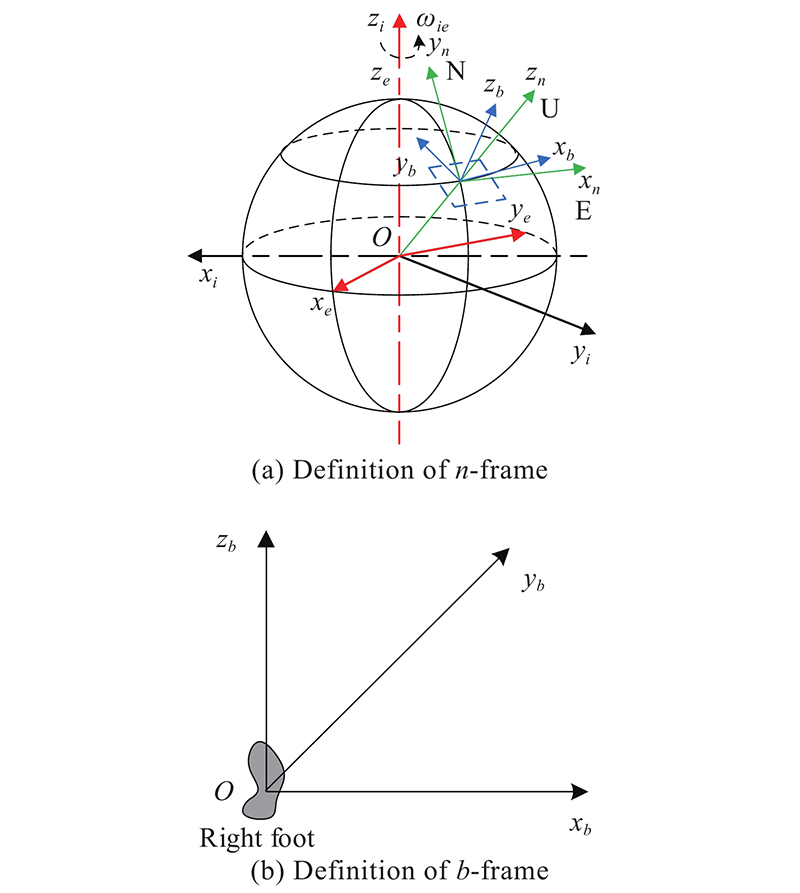

Fig 2
Pedestrian gait classification"

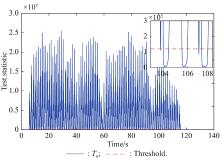
Fig 3
Phenomenon where the swing state is below a threshold value"
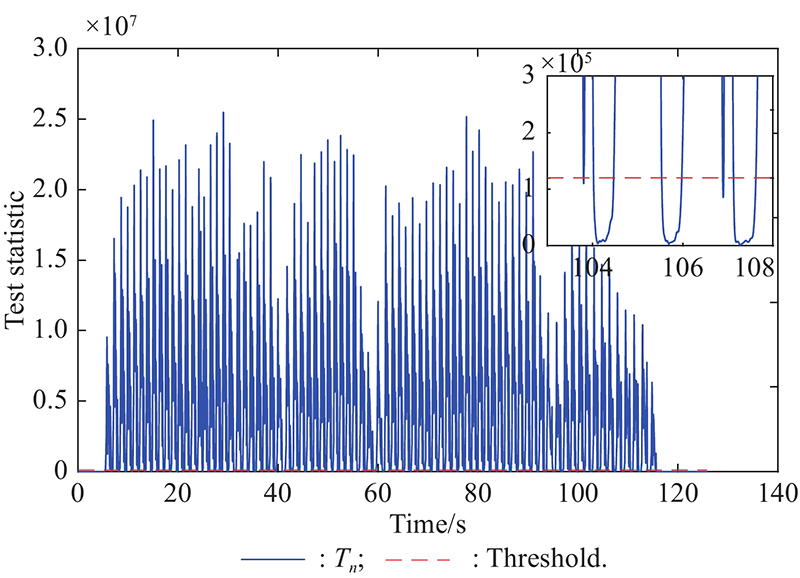

Fig 4
Results of the gait detection and the intercepts"
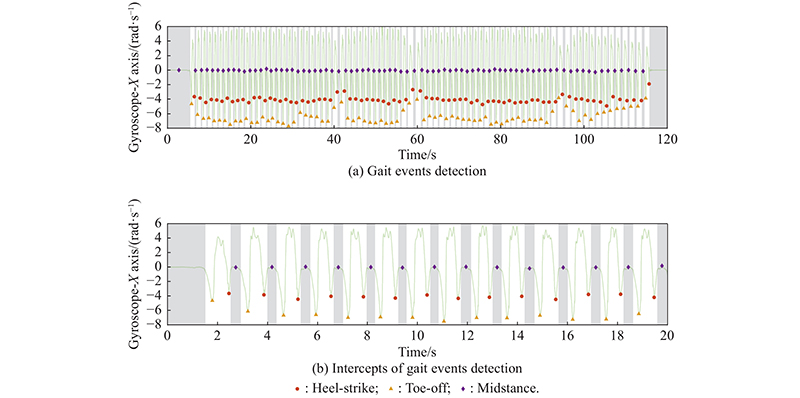
Fig 5
Common eight pre-defined major directions"

Fig 6
Diagram of the walking route under Google maps"
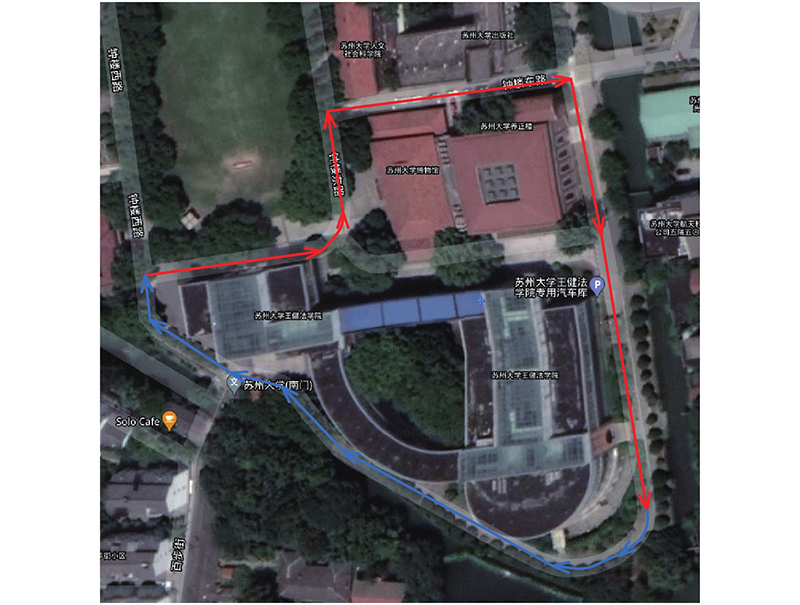
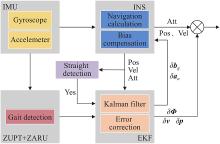
Fig 7
Structure of the proposed algorithm"
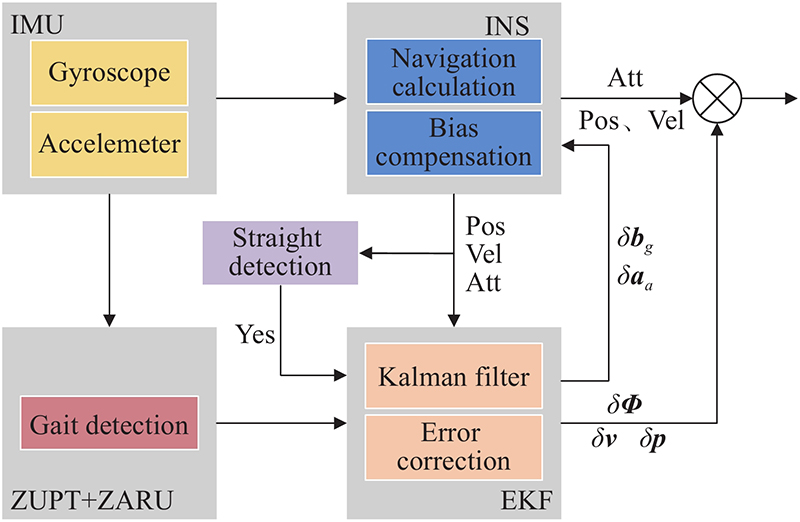
Table 1
Simulation parameter settings"
| Symbol | Parameter | Value |
| | Step length/m | 1.2 |
| | Max height/m | 0.15 |
| | Swing phase cycle/s | 1.0 |
| | Stance phase cycle/s | 0.5 |
| | Max pitch/rad | 0.6 |
| | Turning cycle/s | 0.5 |
| | Gyroscope bias/(°/s) | |
| | Accelerometer bias/(m/s2) | |
| | Gyroscope noise/ | |
| | Accelerometer noise/ | |
| | Initial yaw/(°) | 0 |
| | Sample frequency/Hz | 100 |
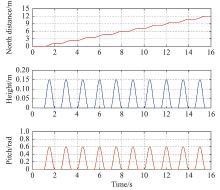
Fig 8
Partial graphics generated by simulation"

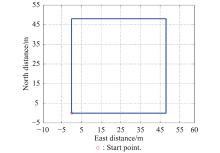
Fig 9
Generated pedestrian trajectory in simulation"
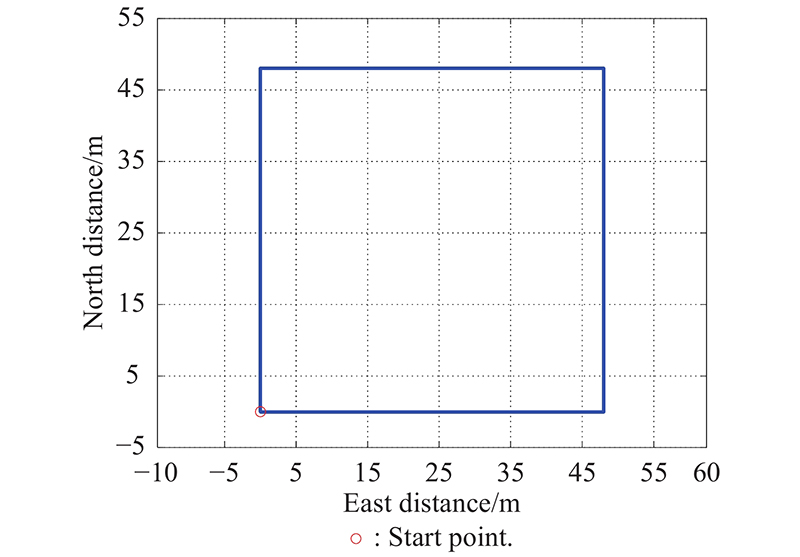
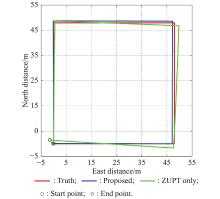
Fig 10
Comparison of results using different methods"
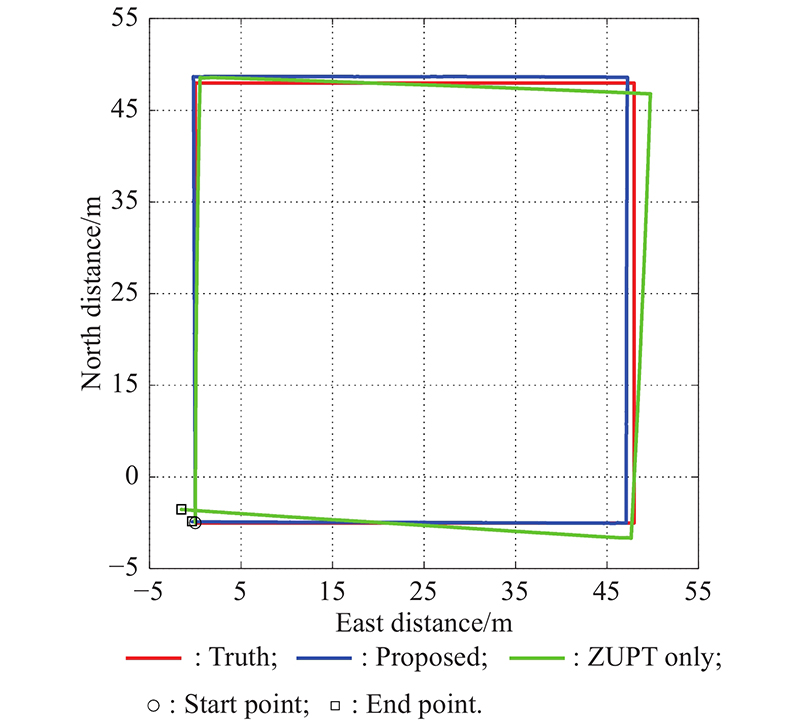
Table 2
MPU9250 sensor performance parameters"
| Parameter | Gyroscope | Accelerometer |
| Maximum range | | |
| Sensitivity | | |
| Non-linearity | 0.2 % | 0.5 % |
| Initial bias | | |
| Noise density | | |
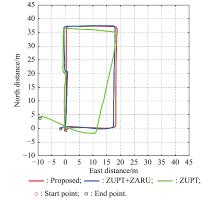
Fig 11
Plane trajectory comparison of closed rectangular paths using different algorithms"
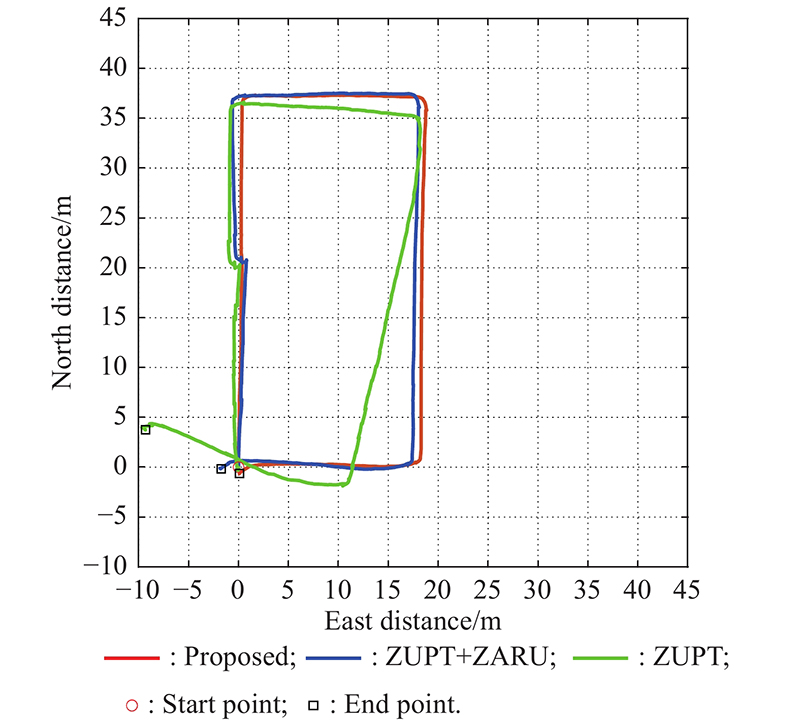
Table 3
Comparison of walking experiment results for different methods"
| Algorithm | Total distance / m | End-point / m | Positioning error /% | |||||
| Test1 | Test2 | Test1 | Test2 | Test1 | Test2 | |||
| Proposed method | 110 | 590 | (0.48,?0.58) | (?0.86,?1.73) | 0.68 | 0.33 | ||
| ZUPT+ZARU | 110 | 590 | (?1.97,?0.12) | (42.65,59.23) | 1.79 | 12.37 | ||
| ZUPT only | 110 | 590 | (?8.10,4.82) | (56.41,58.26) | 8.56 | 13.74 | ||
Fig 12
Attitude angles of a closed rectangular path in the navigation coordinate system"
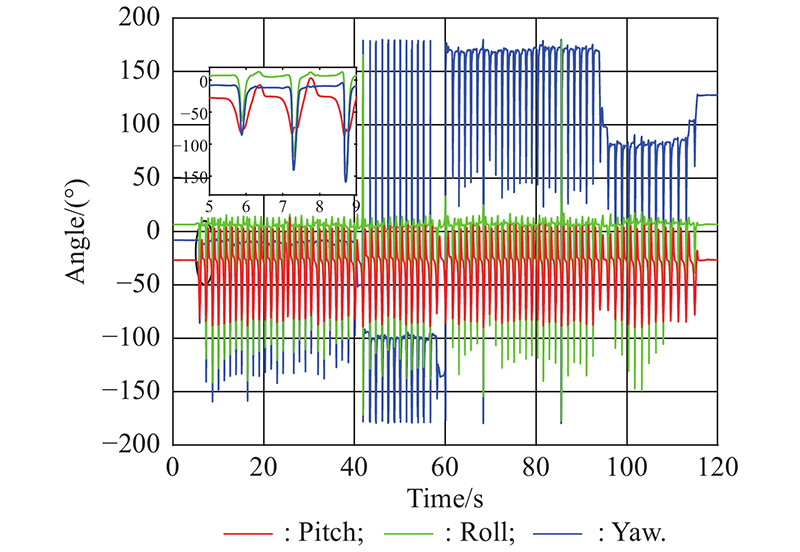
Fig 13
Velocity of the closed rectangular path in the navigation coordinate system"
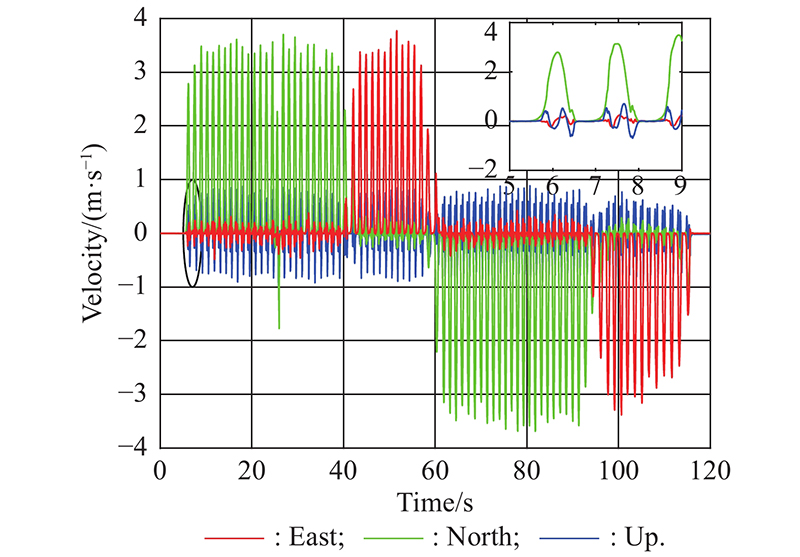
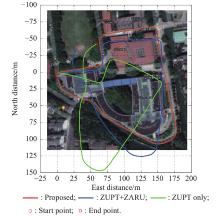
Fig 14
Trajectory comparison of closed curve paths using different algorithms"
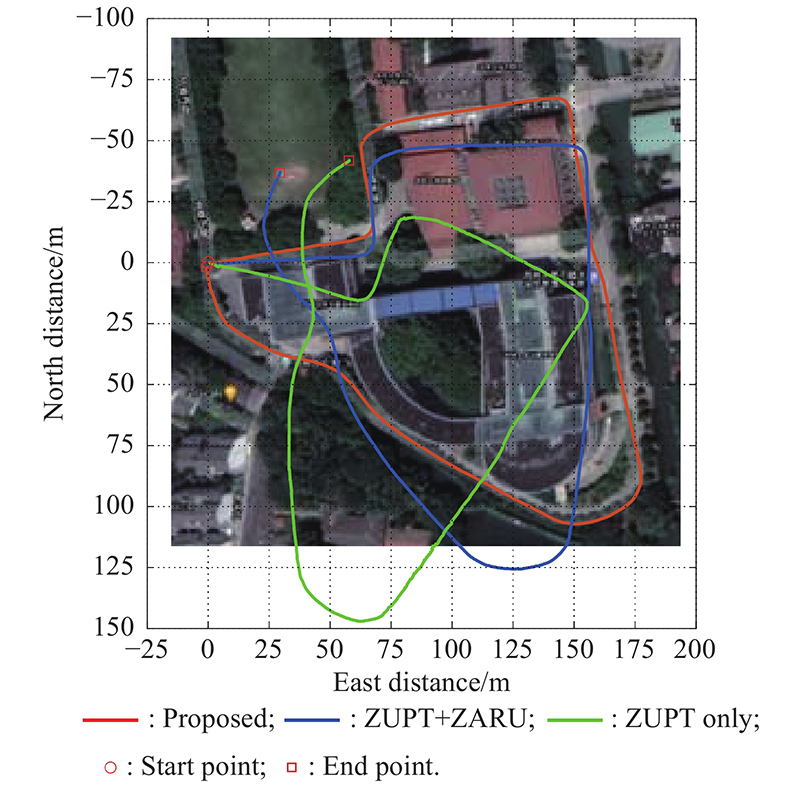
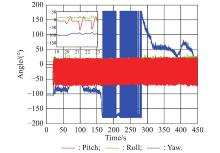
Fig 15
Attitude angles of closed curve paths in the navigation coordinate system"
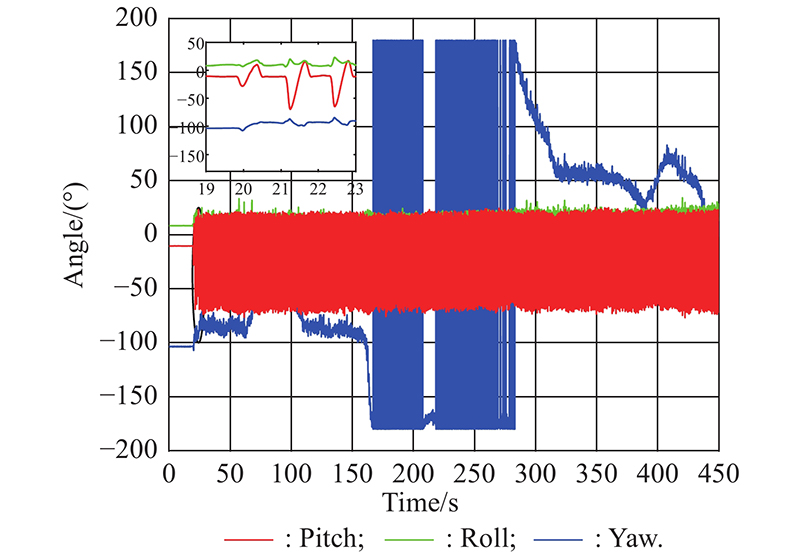
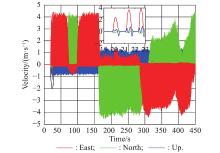
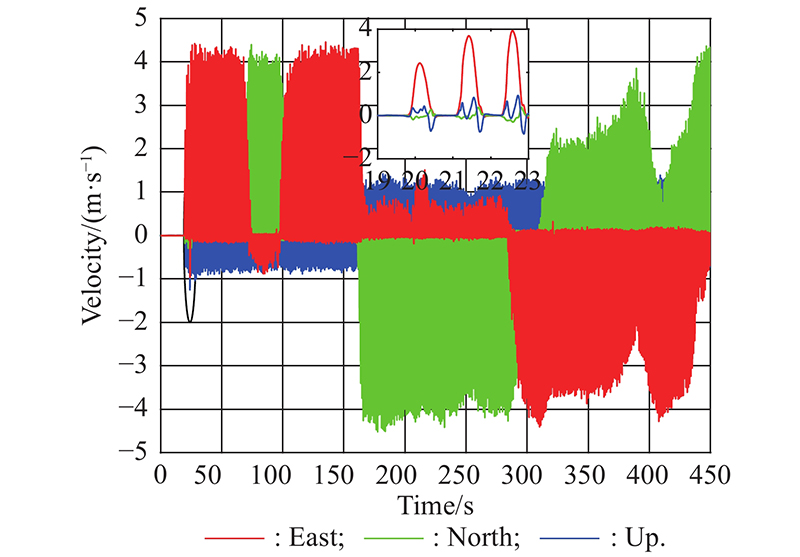
Fig 16
Velocity of closed curve paths in the navigation coordinate system"
| 1 | HARLE R A survey of indoor inertial positioning systems for pedestrians. IEEE Communications Surveys & Tutorials, 2013, 15 (3): 1281- 1293. |
| 2 | FALLAH N, APOSTOLOPOULOS I, BEKRIS K, et al Indoor human navigation systems: a survey. Interacting with Computers, 2013, 25 (1): 21- 33. |
| 3 | HONKAVIRTA V, PERALA T, ALI-LOYTTY S, et al A comparative survey of WLAN location fingerprinting methods. Proc. of the 6th Workshop on Positioning, Navigation and Communication, 2009, 243- 251. |
| 4 |
ELLOUMI W, LATOUI A, CANALS R, et al Indoor pedestrian localization with a smartphone: a comparison of inertial and vision-based methods. IEEE Sensors Journal, 2016, 16 (13): 5376- 5388.
doi: 10.1109/JSEN.2016.2565899 |
| 5 |
HSU Y L, WANG J S, CHANG C W A wearable inertial pedestrian navigation system with quaternion-based extended Kalman filter for pedestrian localization. IEEE Sensors Journal, 2017, 17 (10): 3193- 3206.
doi: 10.1109/JSEN.2017.2679138 |
| 6 |
ZHAO Y L, LIANG J Q, SHA X P, et al Estimation of pedestrian altitude inside a multi-story building using an integrated micro-IMU and barometer device. IEEE Access, 2019, 7, 84680- 84689.
doi: 10.1109/ACCESS.2019.2924664 |
| 7 | MADGWICK S O H, HARRISON A J L, VAIDYANATHAN R Estimation of IMU and MARG orientation using a gradient descent algorithm. Proc. of the IEEE International Conference on Rehabilitation Robotics, 2011, 1- 7. |
| 8 |
GROVES P D Navigation using inertial sensors. IEEE Aerospace and Electronic Systems Magazine, 2015, 30 (2): 42- 69.
doi: 10.1109/MAES.2014.130191 |
| 9 |
FOXLIN E Pedestrian tracking with shoe-mounted inertial sensors. IEEE Computer Graphics and Applications, 2005, 25 (6): 38- 46.
doi: 10.1109/MCG.2005.140 |
| 10 |
PARK S K, SUH Y S A zero velocity detection algorithm using inertial sensors for pedestrian navigation systems. Sensors, 2010, 10 (10): 9163- 9178.
doi: 10.3390/s101009163 |
| 11 | WAHLSTROM J, SKOG I Fifteen years of progress at zero velocity: a review. IEEE Sensors Journal, 2020, 21 (2): 1139- 1151. |
| 12 | TJHAI C. Integration of multiple low-cost wearable inertial/magnetic sensors and kinematics of lower limbs for improving pedestrian navigation systems. Alberta: University of Calgary, 2019. |
| 13 |
NORRDINE A, KASMI Z, BLANKENBACH J Step detection for ZUPT-aided inertial pedestrian navigation system using foot-mounted permanent magnet. IEEE Sensors Journal, 2016, 16 (17): 6766- 6773.
doi: 10.1109/JSEN.2016.2585599 |
| 14 |
JIMENEZ A R, SECO F, ZAMPELLA F, et al PDR with a foot-mounted IMU and ramp detection. Sensors, 2011, 11 (10): 9393- 9410.
doi: 10.3390/s111009393 |
| 15 |
BORENSTEIN J, OJEDA L Heuristic drift elimination for personnel tracking systems. The Journal of Navigation, 2010, 63 (4): 591- 606.
doi: 10.1017/S0373463310000184 |
| 16 | JIMENEZ A R, SECO F, ZAMPELLA F, et al Improved heuristic drift elimination (iHDE) for pedestrian navigation in complex buildings. Proc. of the International Conference on Indoor Positioning and Indoor Navigation, 2011, 1- 8. |
| 17 |
SKOG I, HANDEL P, NILSSON J O, et al Zero-velocity detection—an algorithm evaluation. IEEE Trans. on Biomedical Engineering, 2010, 57 (11): 2657- 2666.
doi: 10.1109/TBME.2010.2060723 |
| 18 | CGROVES P D. Principles of GNSS, inertial, and multi-sensor integrated navigation systems. USA: Artech House Verlag, 2013. |
| 19 | FISCHER C, SUKUMAR P T, HAZAS M Tutorial: implementing a pedestrian tracker using inertial sensors. IEEE Pervasive Computing, 2012, 12 (2): 17- 27. |
| 20 | SKOG I, HANDEL P A low-cost GPS aided inertial navigation system for vehicle applications. Proc. of the 13th European Signal Processing Conference, 2005, 1- 4. |
| 21 | WANG Y S, CHERNYSHOFF A, SHKEL A M Study on estimation errors in ZUPT-aided pedestrian inertial navigation due to IMU noises. IEEE Trans. on Aerospace and Electronic Systems, 2019, 56 (3): 2280- 2291. |
| 22 | ZHU M, WU Y, LUO S. A pedestrian navigation system by low-cost dual foot-mounted IMUs and inter-foot ranging. Proc. of the German Institute of Navigation Inertial Sensors and Systems, 2020: 1−20. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||