
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (4): 812-826.doi: 10.23919/JSEE.2022.000081
• CLOUD CONTROL SYSTEMS • Previous Articles Next Articles
Shuyan LI1( ), Keke WAN1, Bolin GAO2,*(), Rui LI1(), Yue WANG2(), Keqiang LI2
), Keke WAN1, Bolin GAO2,*(), Rui LI1(), Yue WANG2(), Keqiang LI2
Received:2022-03-01
Online:2022-08-30
Published:2022-08-30
Contact:
Bolin GAO
E-mail:lishuyan@cau.edu.cn;gaobolin@tsinghua.edu.cn;lirui@cau.edu.cn;wyue@mail.tsinghua.edu.cn
About author:Supported by:Shuyan LI, Keke WAN, Bolin GAO, Rui LI, Yue WANG, Keqiang LI. Predictive cruise control for heavy trucks based on slope information under cloud control system[J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 812-826.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
Fig 1
Architecture of CCS for ICVs [6] "
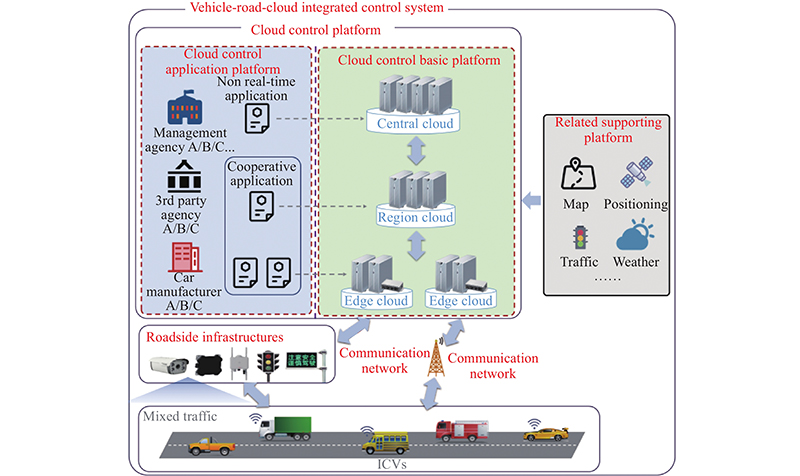
Fig 2
Schematic diagram of layered architecture"
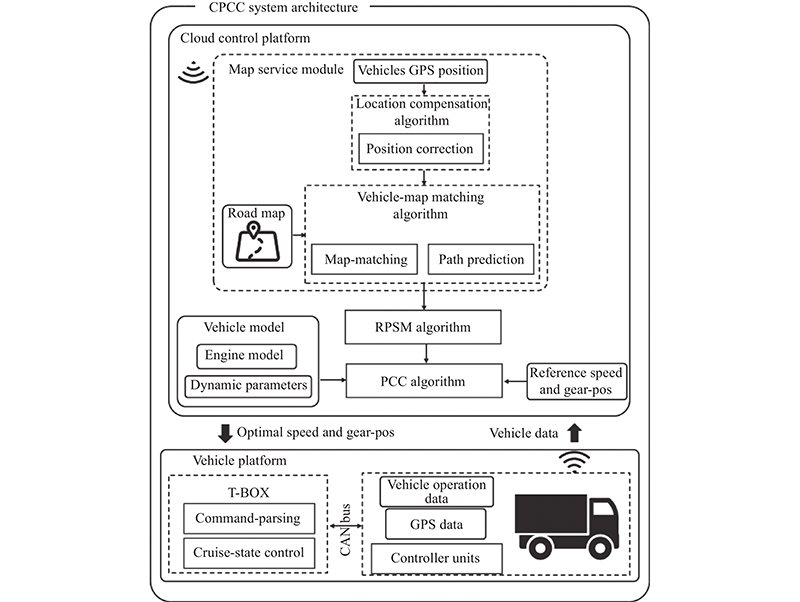
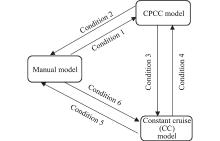
Fig 3
Transformation logic diagram"
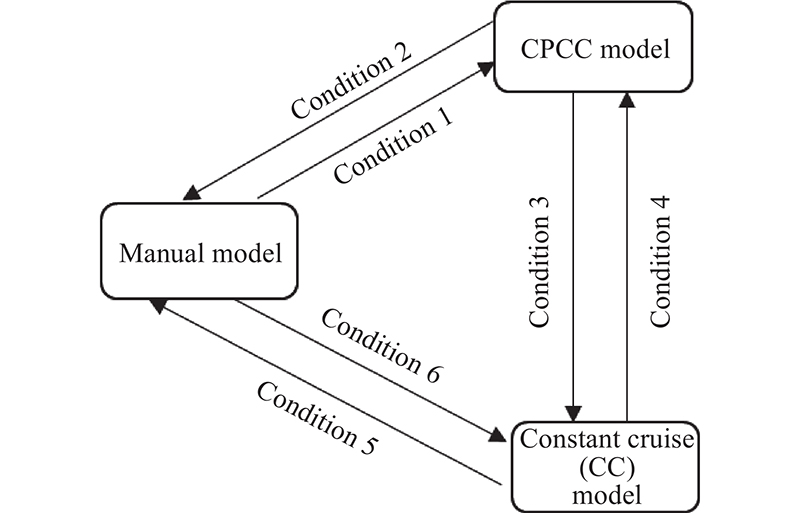
Table 1
Table of conditions"
| Condition series | Value of relevant signals |
| Condition 1 | CPCC switch=1 and data format=1 and network status=1 and GPS signal quality=1 and vehicle speed |
| Condition 2 | CC switch=0 |
| Condition 3 | CPCC switch=0 or data format=0 or network status=0 or GPS signal quality=0 or vehicle speed |
| Condition 4 | Same as Condition 1 |
| Condition 5 | Same as Condition 2 |
| Condition 6 | CC switch=1 |

Fig 4
Prototype of the investigated truck"

Table 2
Parameters of the truck"
| Item | Parameter | Symbol | Value |
| Engine | Engine speed range/(r/min) | | [700 2100] |
| Engine torque range/Nm | | [?160 2549] | |
| Moment of inertia /kgm2 | | [2.5 3.5] | |
| Driveline | Final drive ratio | | 3.7 |
| Transmission ratio | | [12.26,9.56,7.36,5.8, 4.52,3.53,2.71,2.12, 1.62,1.29,1,0.78] | |
| Final drive efficiency | | 0.95 | |
| Transmission efficiency | | [0.966,0.966,0.969,0.971, 0.975,0.977,0.985,0.988, 0.988,0.989,0.989,0.99] | |
| Longitudinal force | Vehicle curb mass/kg | | 49000 |
| Effective tire radius/m | | 0.459 | |
| Frontal area/m2 | | [5.0 10.0] | |
| Air drag coefficient | | [0.5 1.0] | |
| Rolling resistance coefficient | | [0.010 0.018] |
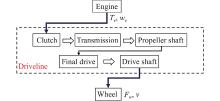
Fig 5
Power transfer route of the vehicle"
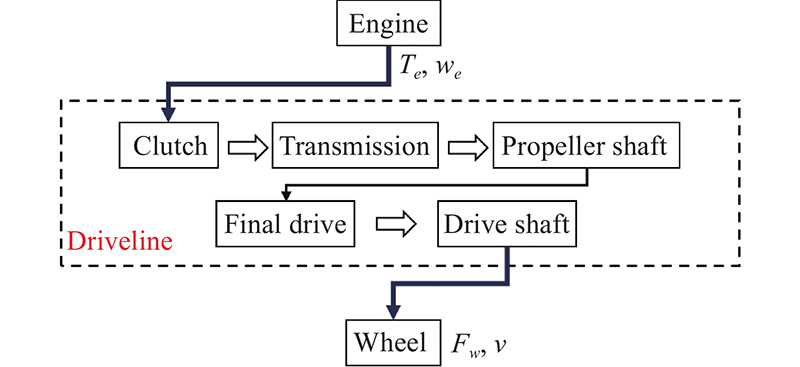
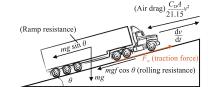
Fig 6
Force analysis diagram of vehicle driving"
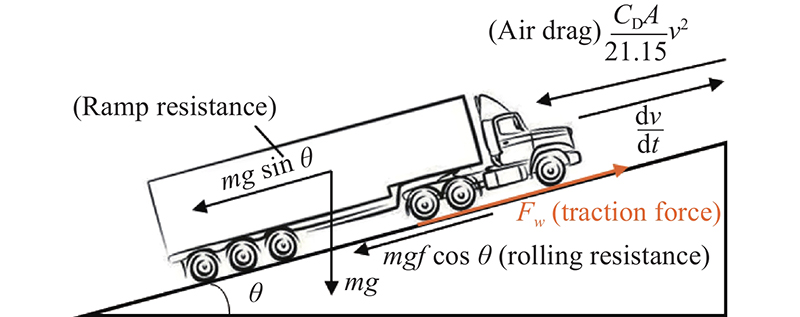
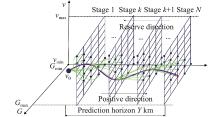
Fig 7
State space and computational logic diagram of the PCC algorithm"
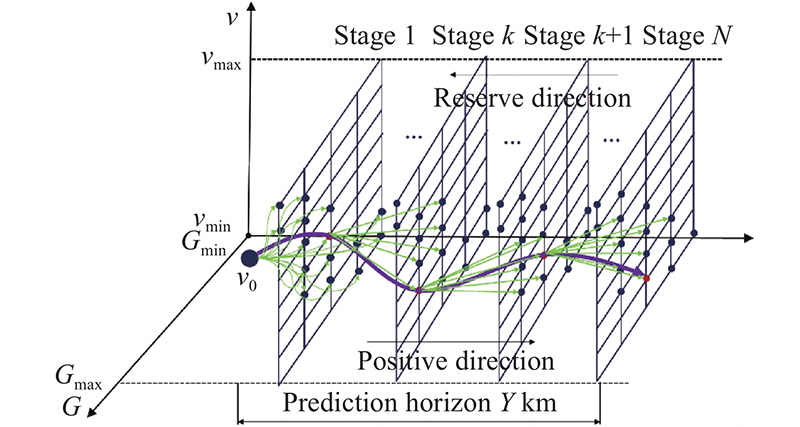

Fig 8
Algorithm flow chart of RPSM"
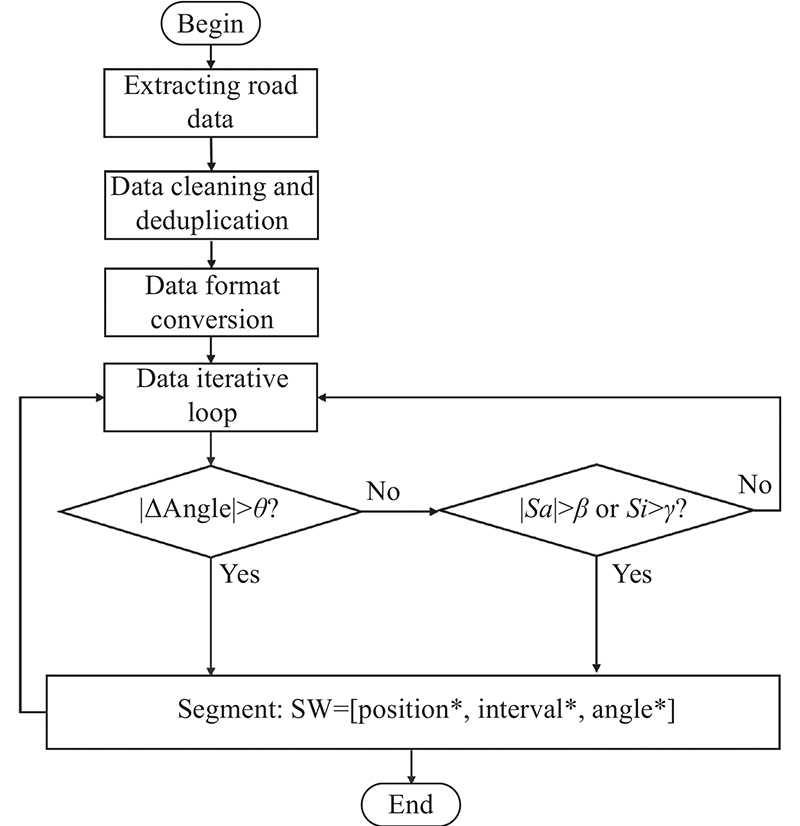
Fig 9
Control process and method of CPCC system"
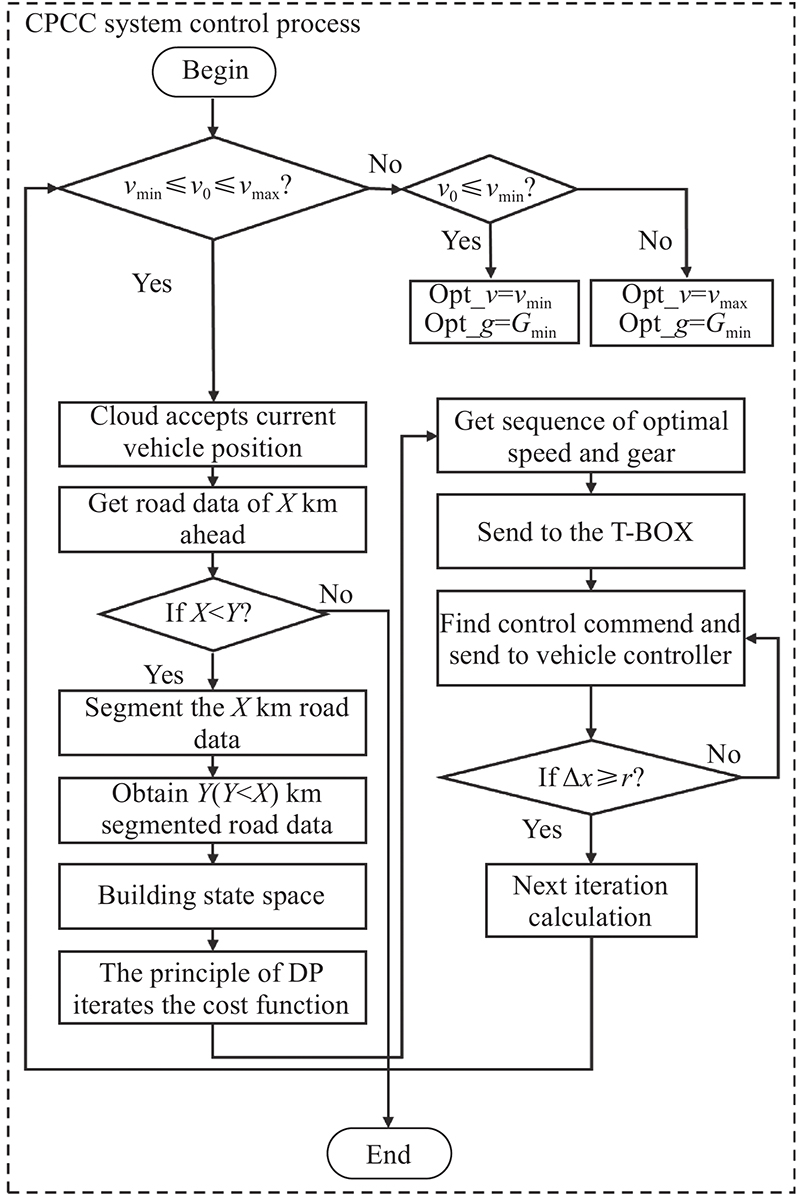

Fig 10
Aerial view of the simulated road"
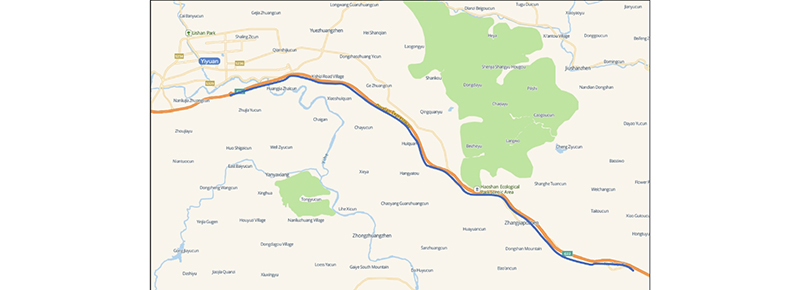
Fig 11
Segmentation effect of the RPSM algorithm"
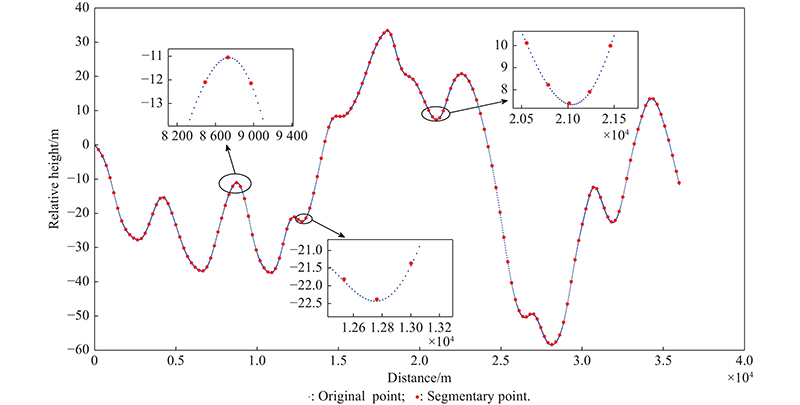
Fig 12
Histogram of data volume comparison (roadpoint reduction rate of 91%)"
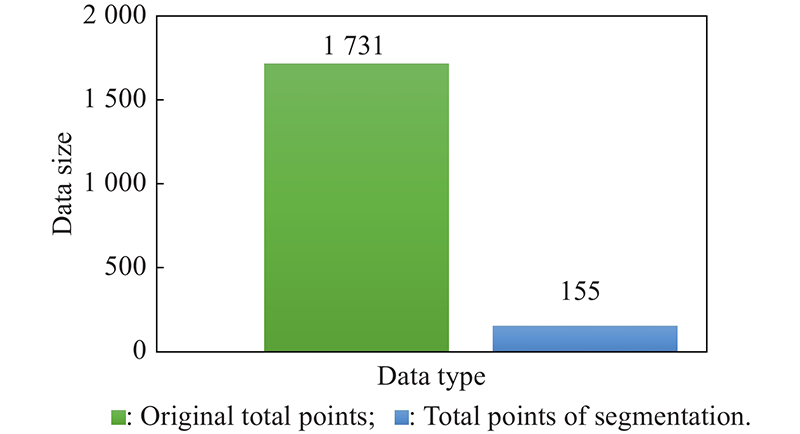
Fig 13
Simulation model of the CPCC system"
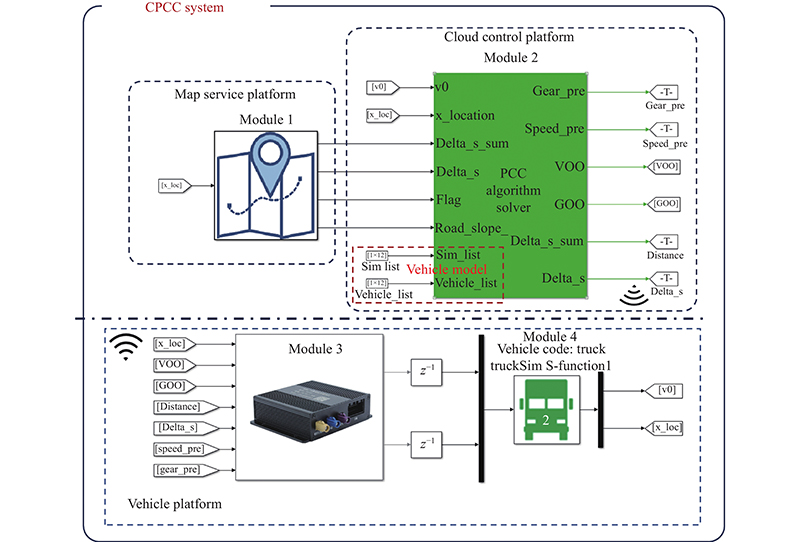
Table 3
Weight parameter of the cost function"
| Weight factor | value |
| | 1 |
| | 0.025 |
| | 0.01 |
| | 0.02 |
| | 1 |
Table 4
Simulation parameters of the CPCC system"
| Parameter | Symbol | Value |
| Predictive horizon/km | Y | 3 |
| Segmentation horizon/km | X | 9 |
| Iteration distance/m | | 200 |
| Discrete interval /(m/s) | | 0.2 |
| Reference velocity /(km/h) | | 70 |
| Engine min rpm /(r/min) | | 1000 |
| Engine max rpm /(r/min) | | 1800 |
| Min gear position | | 10 |
| Max gear position | | 12 |
| Maximum acceleration /(m/s2) | | 0.4 |
| Minimum acceleration /(m/s2) | | ?0.4 |

Fig 14
General diagram of simulation results in the entire section"
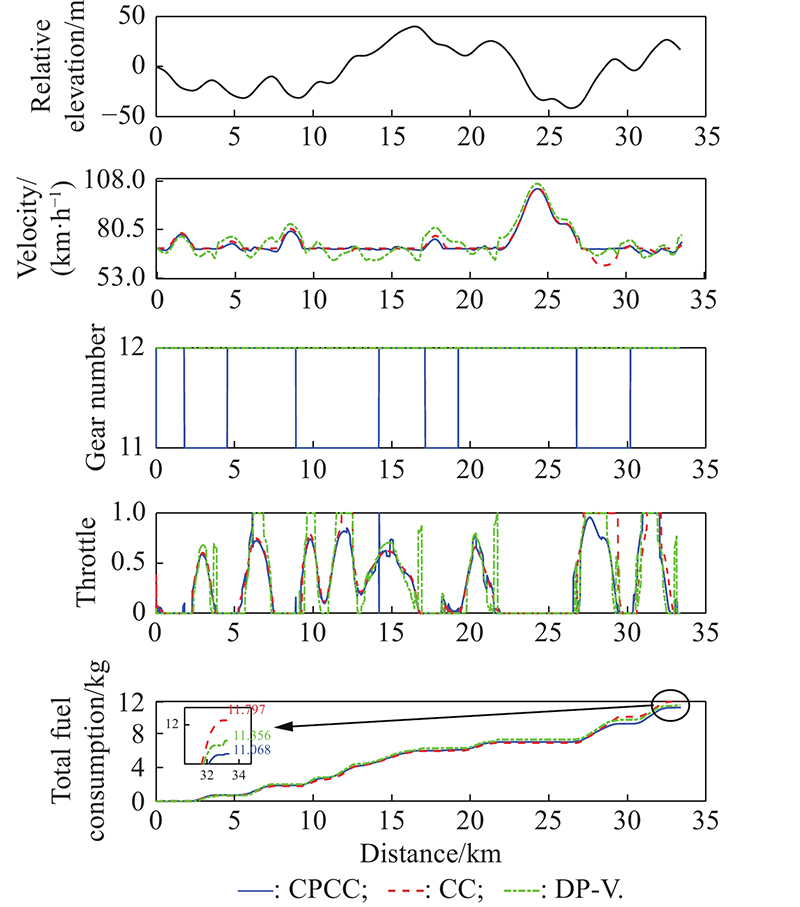
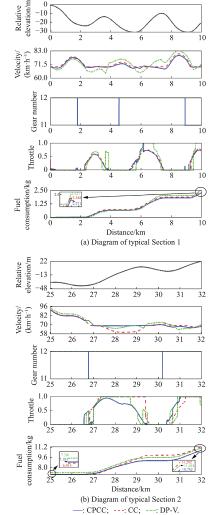
Fig 15
Simulation result sub-diagram in typical section"
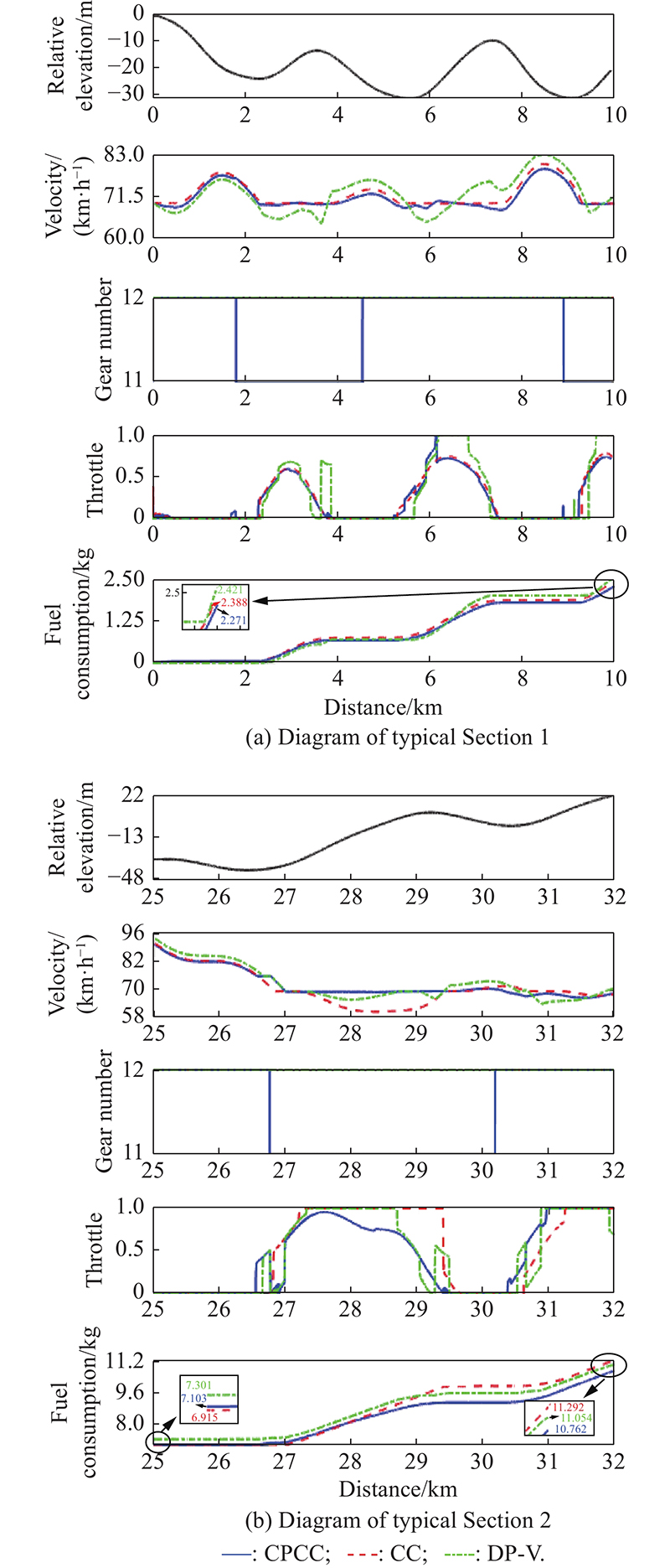
Table 5
Simulation results of the various algorithms"
| Type | Distance /km | Time /s | Fuel consumption /kg | Fuel-saving rate/% |
| CC | 34 | 1648.3 | 11.797 | ? |
| DP-V | 34 | 1655.4 | 11.356 | 3.74 |
| CPCC | 34 | 1658.8 | 11.068 | 6.17 |

Fig 16
Interval distribution of engine working in the CC mode"
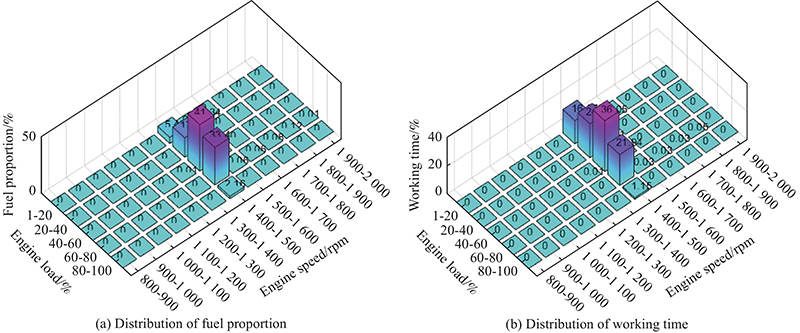

Fig 17
Interval distribution of engine working in the DP-V mode"
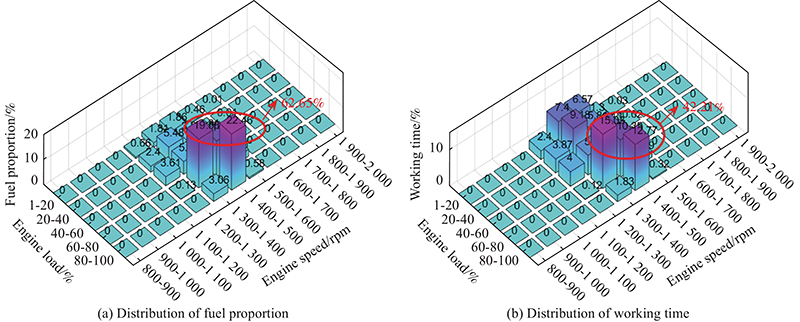

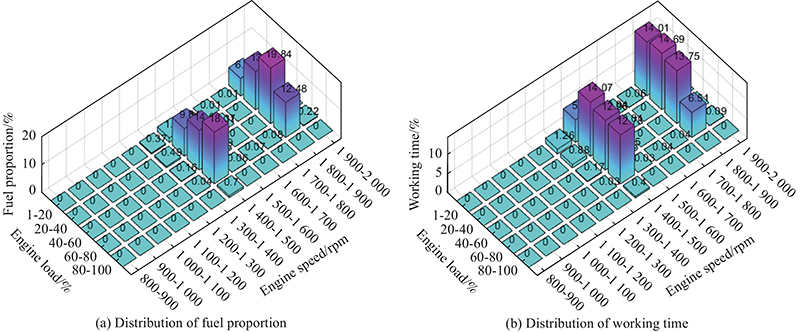
Fig 18
Interval distribution of engine working in the CPCC mode"
| 1 |
XIA Y Q Cloud control systems. IEEE/CAA Journal of Automatica Sinica, 2015, 2 (2): 134- 142.
doi: 10.1109/JAS.2015.7081652 |
| 2 |
CHU W B, WUNIRI Q, DU X P, et al Cloud control system architectures, technologies and applications on intelligent and connected vehicles: a review. Chinese Journal of Mechanical Engineering, 2021, 34 (1): 1- 23.
doi: 10.1186/s10033-020-00524-5 |
| 3 |
YANG S C, ZHANG Z J, CAO R, et al Implementation for a cloud battery management system based on the CHAIN framework. Energy and AI, 2021, 5, 100088.
doi: 10.1016/j.egyai.2021.100088 |
| 4 |
XU X L, WU J X, YANG G, et al Low-power task scheduling algorithm for large-scale cloud data centers. Journal of Systems Engineering and Electronics, 2013, 24 (5): 870- 878.
doi: 10.1109/JSEE.2013.00101 |
| 5 |
XU X L, ZHANG Q T, MOU Y Q, et al Server load prediction algorithm based on CM-MC for cloud systems. Journal of Systems Engineering and Electronics, 2018, 29 (5): 1069- 1078.
doi: 10.21629/JSEE.2018.05.17 |
| 6 | LI K Q, LI J W, CHANG X Y, et al Principles and typical applications of cloud control system for intelligent and connected vehicles. Journal of Automotive Safety and Energy, 2020, 11 (3): 261- 275. |
| 7 | HELLSTROM E Explicit use of road topography for model predictive cruise control in heavy trucks. Linkoping: Linkoping University, 2005. |
| 8 | LATTEMANN F, NEISS K, TERWEN S, et al The predictive cruise control–a system to reduce fuel consumption of heavy duty trucks. SAE Transactions, 2004, 113 (2): 139- 146. |
| 9 | LI K Q, CHANG X Y, LI J W Cloud control system for intelligent and connected vehicles and its application. Automotive Engineering, 2020, 42 (12): 1595- 1605. |
| 10 | XIA Y Q From networked control systems to cloud control systems. Proc. of the 31st Chinese Control Conference, 2012, 5878- 5883. |
| 11 | KHATTAB A, ABDELGAWAD A, YELMARTHI K Design and implementation of a cloud-based IoT scheme for precision agriculture. Proc. of the 28th International Conference on Microelectronics, 2016, 201- 204. |
| 12 | ET-TAIBI B, ABID M R, BOUMHIDI I, et al Smart agriculture as a cyber physical system: a real-world deployment. Proc. of the 4th International Conference on Intelligent Computing in Data Sciences, 2020, 1- 7. |
| 13 |
HU L, MIAO Y M, WU G X, et al iRobot-Factory: an intelligent robot factory based on cognitive manufacturing and edge computing. Future Generation Computer Systems, 2019, 90, 569- 577.
doi: 10.1016/j.future.2018.08.006 |
| 14 |
CHEN G G, WANG P, FENG B, et al The framework design of smart factory in discrete manufacturing industry based on cyber-physical system. International Journal of Computer Integrated Manufacturing, 2020, 33 (1): 79- 101.
doi: 10.1080/0951192X.2019.1699254 |
| 15 | XIA Y Q, YAN C, WANG X J, et al Intelligent transportation cyber-physical cloud control systems. Acta Automatica Sinica, 2019, 45 (1): 132- 142. |
| 16 |
OZATAY E, ONORI S, WOLLAEGER J, et al Cloud-based velocity profile optimization for everyday driving: a dynamic-programming-based solution. IEEE Trans. on Intelligent Transportation Systems, 2014, 15 (6): 2491- 2505.
doi: 10.1109/TITS.2014.2319812 |
| 17 |
HAMEDNIA A, MURGOVSKI N, FREDRIKSSON J Predictive velocity control in a hilly terrain over a long look-ahead horizon. IFAC-PapersOnLine, 2018, 51 (31): 485- 492.
doi: 10.1016/j.ifacol.2018.10.107 |
| 18 |
SCHWARZKOPF A B, LEIPNIK R B Control of highway vehicles for minimum fuel consumption over varying terrain. Transportation Research, 1977, 11 (4): 279- 286.
doi: 10.1016/0041-1647(77)90093-4 |
| 19 | LIN Y C, HSU H C, KUO I C An eco-cruising control systems using nonlinear predictive control approach. Proc. of the International Automatic Control Conference, 2016, 56- 94. |
| 20 |
WEIBMANN A, GORGES D, LIN X H Energy-optimal adaptive cruise control based on model predictive control. IFAC-PapersOnLine, 2017, 50 (1): 12563- 12568.
doi: 10.1016/j.ifacol.2017.08.2196 |
| 21 | GUO L L, GAO B Z, GAO Y, et al Optimal energy management for HEVs in eco-driving applications using bi-level MPC. IEEE Trans. on Intelligent Transportation Systems, 2016, 18 (8): 2153- 2162. |
| 22 |
KUMAR R, IVANTYSYNOVA M An instantaneous optimization based power management strategy to reduce fuel consumption in hydraulic hybrids. International Journal of Fluid Power, 2011, 12 (2): 15- 25.
doi: 10.1080/14399776.2011.10781027 |
| 23 |
HUANG Y J, YIN C L, ZHANG J W Design of an energy management strategy for parallel hybrid electric vehicles using a logic threshold and instantaneous optimization method. International Journal of Automotive Technology, 2009, 10 (4): 513- 521.
doi: 10.1007/s12239-009-0059-4 |
| 24 |
HELLSTROM E, ASLUND J, NIELSEN L Design of an efficient algorithm for fuel-optimal look-ahead control. Control Engineering Practice, 2010, 18 (11): 1318- 1327.
doi: 10.1016/j.conengprac.2009.12.008 |
| 25 |
HELLSTROM E, IVARSSON M, NIELSEN L Look-ahead control for heavy trucks to minimize trip time and fuel consumption. IFAC Proceedings Volumes, 2007, 40 (10): 439- 446.
doi: 10.3182/20070820-3-US-2918.00060 |
| 26 | CONG X Y, ZHANG Y G, WANG C P, et al Look-ahead gear-shifting strategy on ramps for heavy trucks with automated mechanical transmission. Advances in Mechanical Engineering, 2019, 11 (1): 1- 13. |
| 27 | HELLSTROM E, FROBERG A, NIELSEN L A real-time fuel-optimal cruise controller for heavy trucks using road topography information. Proc. of the SAE World Congress & Exhibition, 2006, 1- 8. |
| 28 | LIN Y C, NGUYEN H L T, BALAS V E, et al Adaptive prediction-based control for an ecological cruise control system on curved and hilly roads. Journal of Intelligent & Fuzzy Systems, 2020, 38 (5): 6129- 6144. |
| 29 | XU S B, LI S E, CHENG B, et al Instantaneous feedback control for a fuel-prioritized vehicle cruising system on highways with a varying slope. IEEE Trans. on Intelligent Transportation Systems, 2016, 18 (5): 1210- 1220. |
| 30 | QU L H Ecological cruising control strategy design of electric vehicle based on prediction of road slopes. Nanjing: Southeast University, 2019. |
| 31 | GILLESPIE T D Fundamentals of vehicle dynamics. New York: SAE International, 2021. |
| 32 |
ZHANG J, JIN H Optimized calculation of the economic speed profile for slope driving: based on iterative dynamic programming. IEEE Trans. on Intelligent Transportation Systems, 2022, 23 (4): 3313- 3323.
doi: 10.1109/TITS.2020.3035610 |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||