
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (6): 1320-1331.doi: 10.23919/JSEE.2022.000151
• CONTROL THEORY AND APPLICATION • Previous Articles
Minghong ZHU1,*( ), Shu XIAO2, Fei YU3
), Shu XIAO2, Fei YU3
Received:2021-04-12
Online:2022-12-18
Published:2022-12-24
Contact:
Minghong ZHU
E-mail:zhumh0109@163.com
About author:Supported by:Minghong ZHU, Shu XIAO, Fei YU. Torque estimation for robotic joint with harmonic drive transmission based on system dynamic characteristics[J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1320-1331.

Fig 1
Typical structure of a harmonic drive"
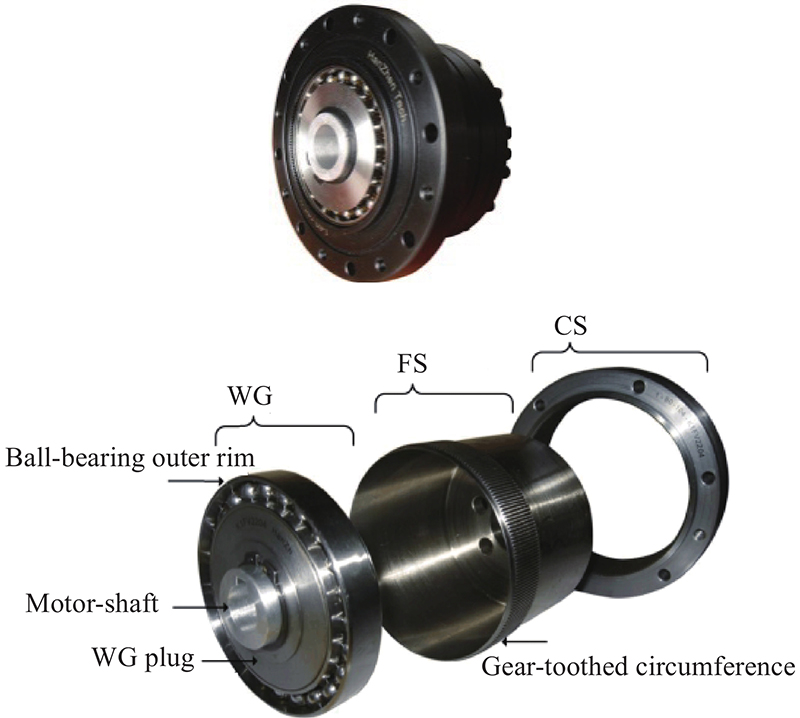
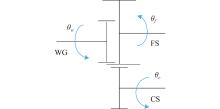
Fig 2
Basic kinematic model of a harmonic drive"
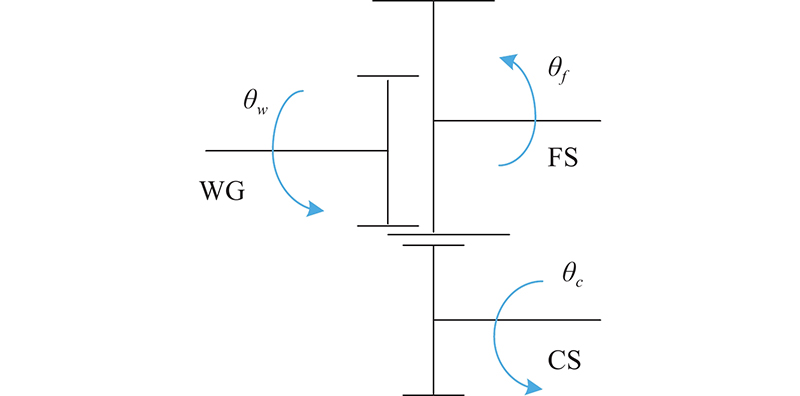
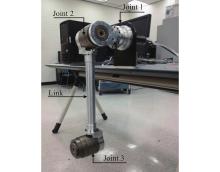
Fig 3
Integration of the joint apparatus"
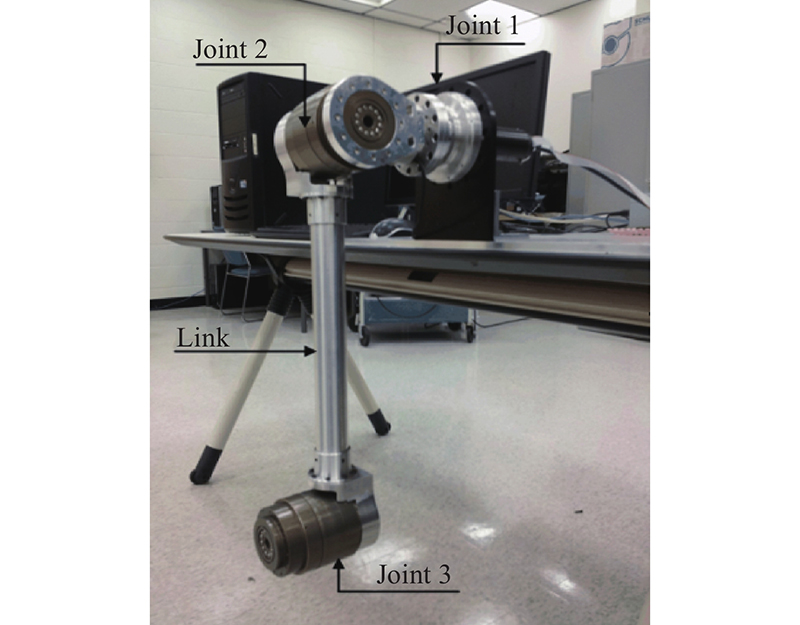
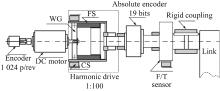
Fig 4
Schematic diagram of the test joint"
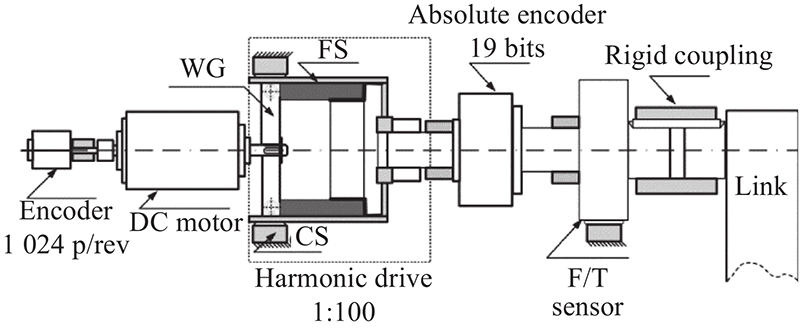
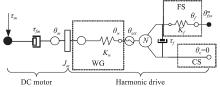
Fig 5
Scheme of harmonic drive compliance components"
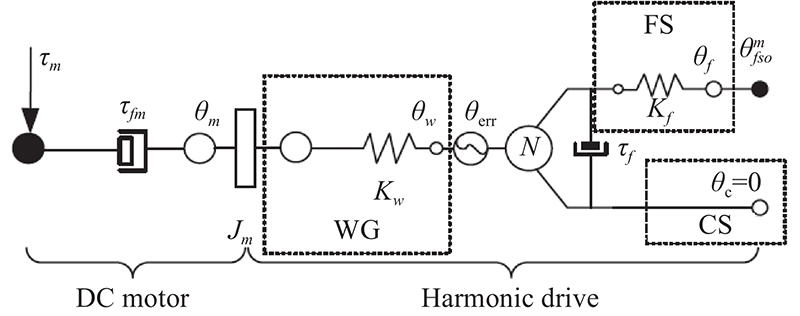
Table 1
Results of experiments running with a relative high frequency and small amplitude torque"
| Model | Maximum torque difference/(N·m) | RMS of the torque difference/(N·m) | Maximum position difference/(°) |
| CM | 1.754 | 0.6022 | 0.1028 |
| CM-KF | 2.132 | 0.1949 | 0.02957 |
| CM-UKF | 0.5793 | 0.0626 | 0.004222 |

Fig 6
Scheme of the torque estimation method"
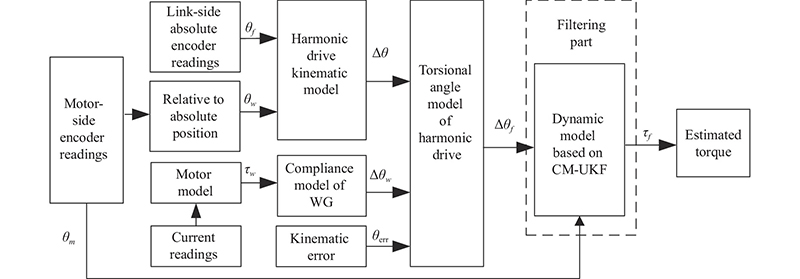
Fig 7
Estimated torque and related difference based on CM compared with torque sensor"
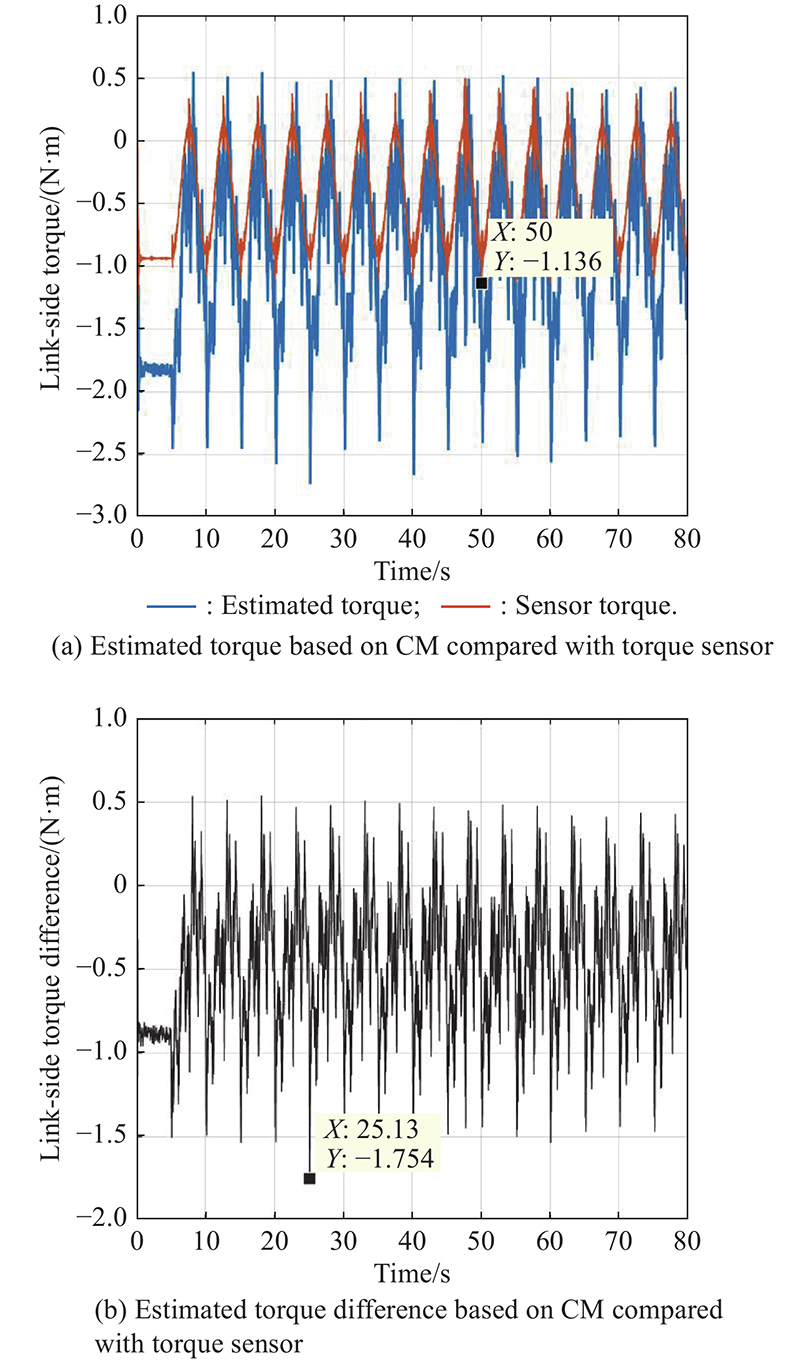
Fig 8
Estimated position difference based on CM compared with torque sensor"
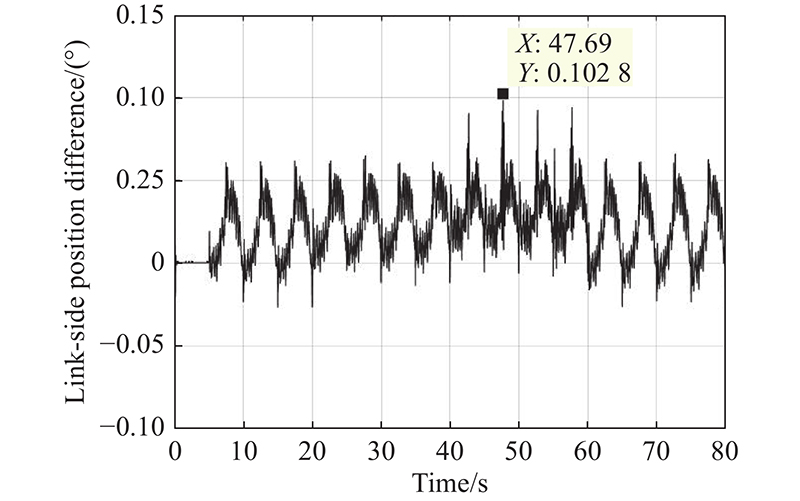

Fig 9
Estimated torque and related difference based on CM-KF compared with torque sensor"
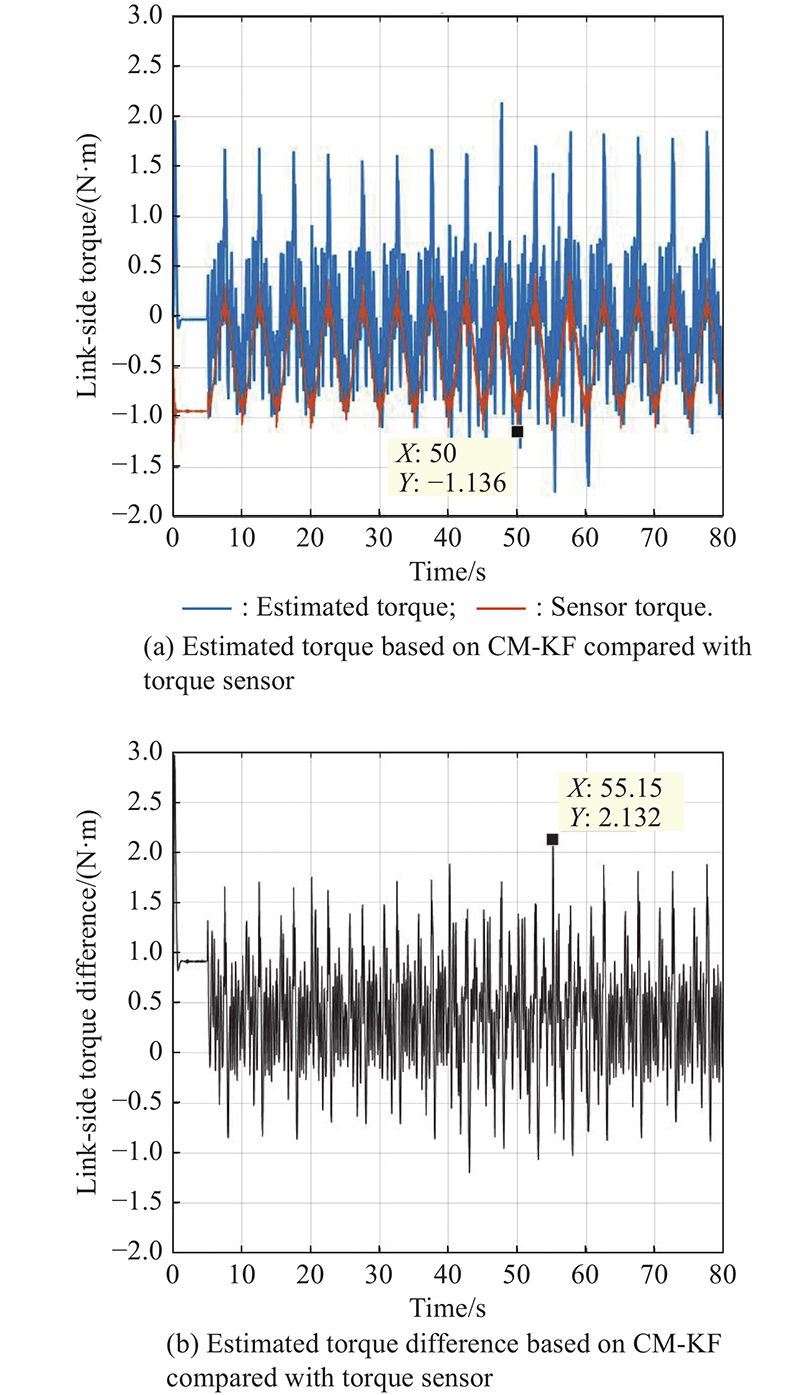
Fig 10
Estimated position difference based on CM-KF compared with torque sensor"
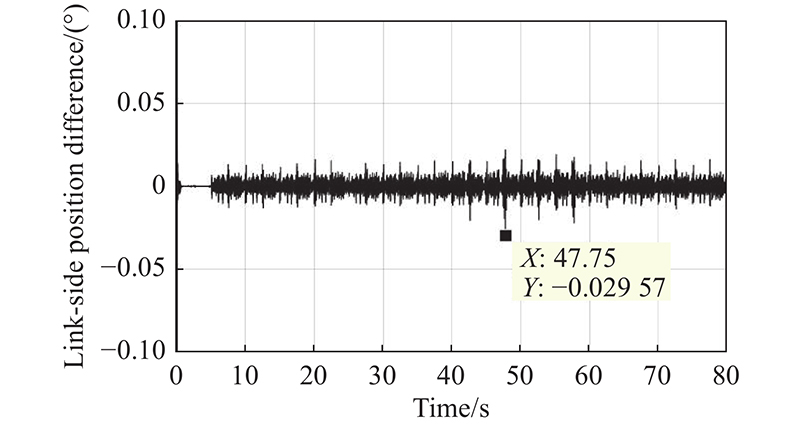
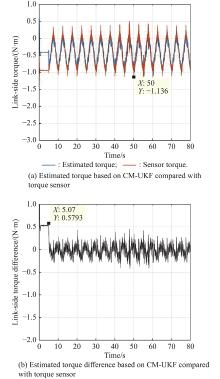
Fig 11
Estimated torque and related difference based on CM-UKF compared with torque sensor"
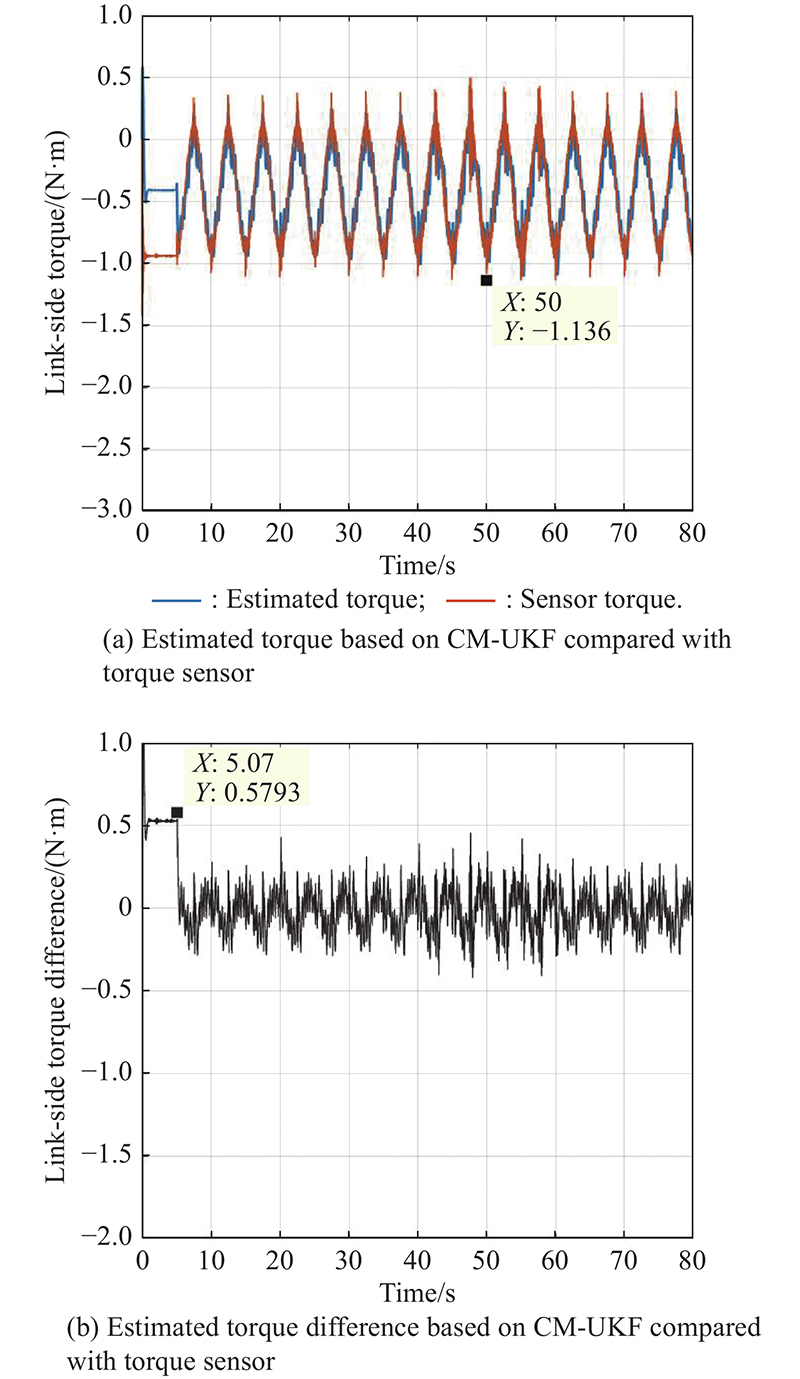
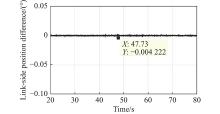
Fig 12
Estimated position difference based on CM-UKF compared with torque sensor"
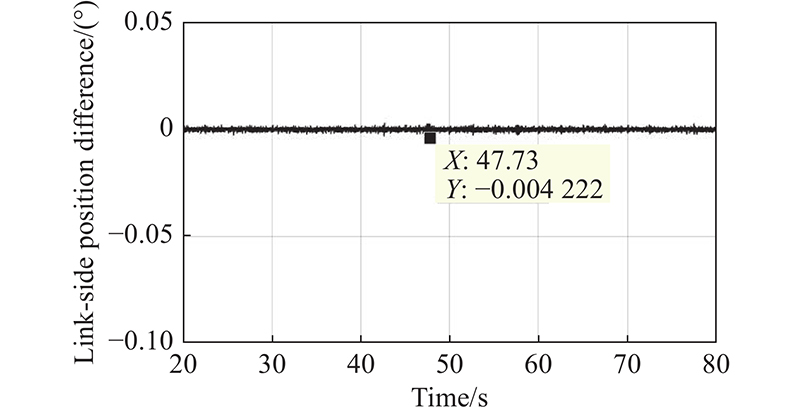
Fig 13
Estimated torque and related difference based on CM compared with torque sensor"
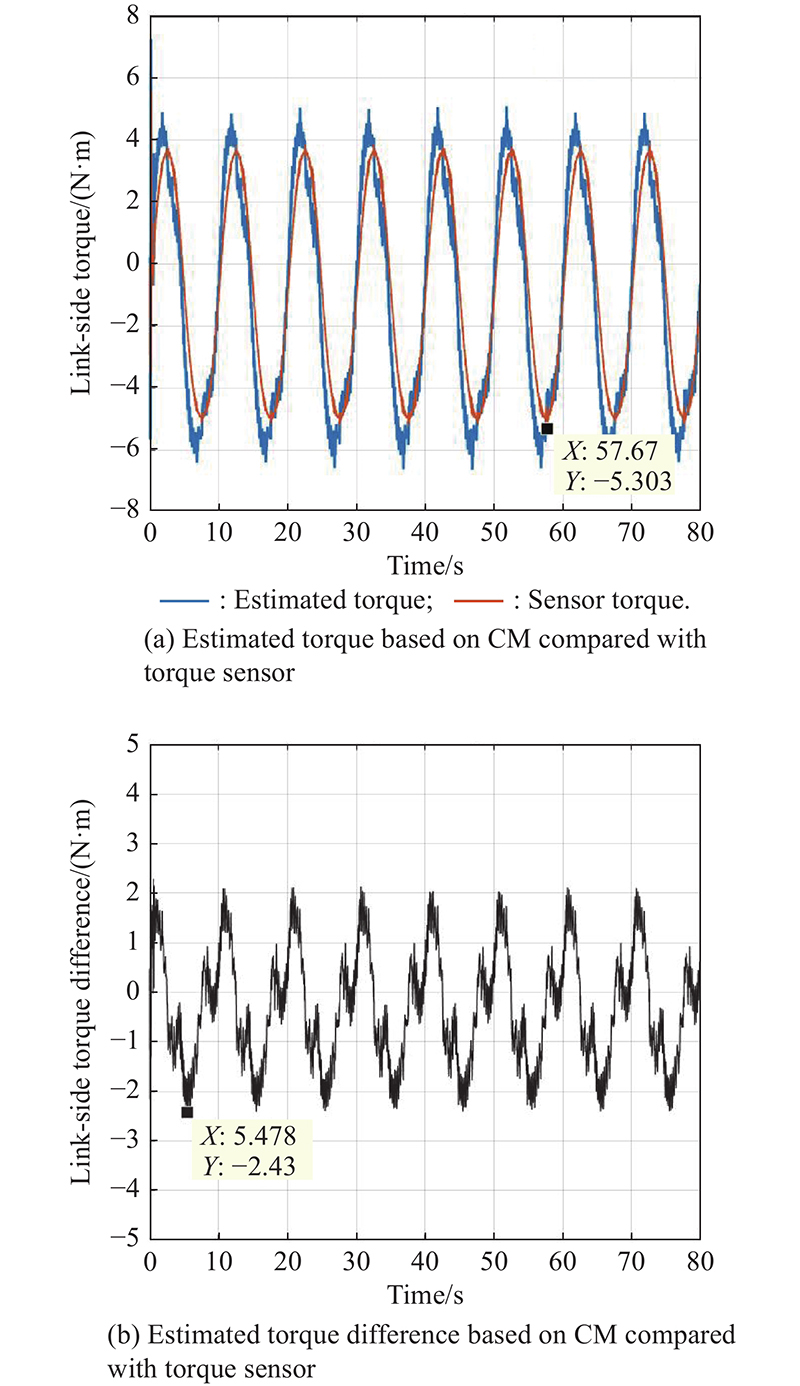
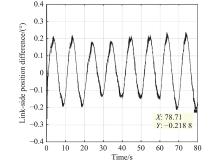
Fig 14
Estimated position difference based on CM compared with torque sensor"
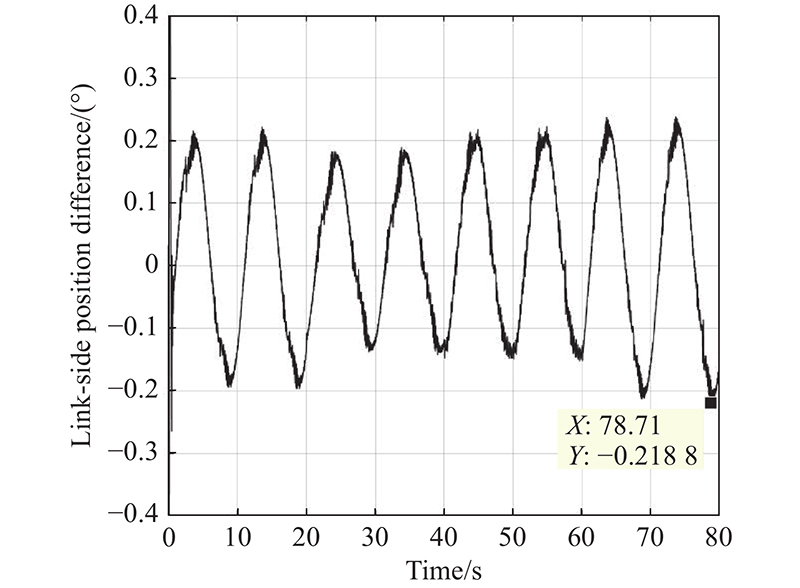

Fig 15
Estimated torque and related difference based on CM-KF compared with torque sensor"
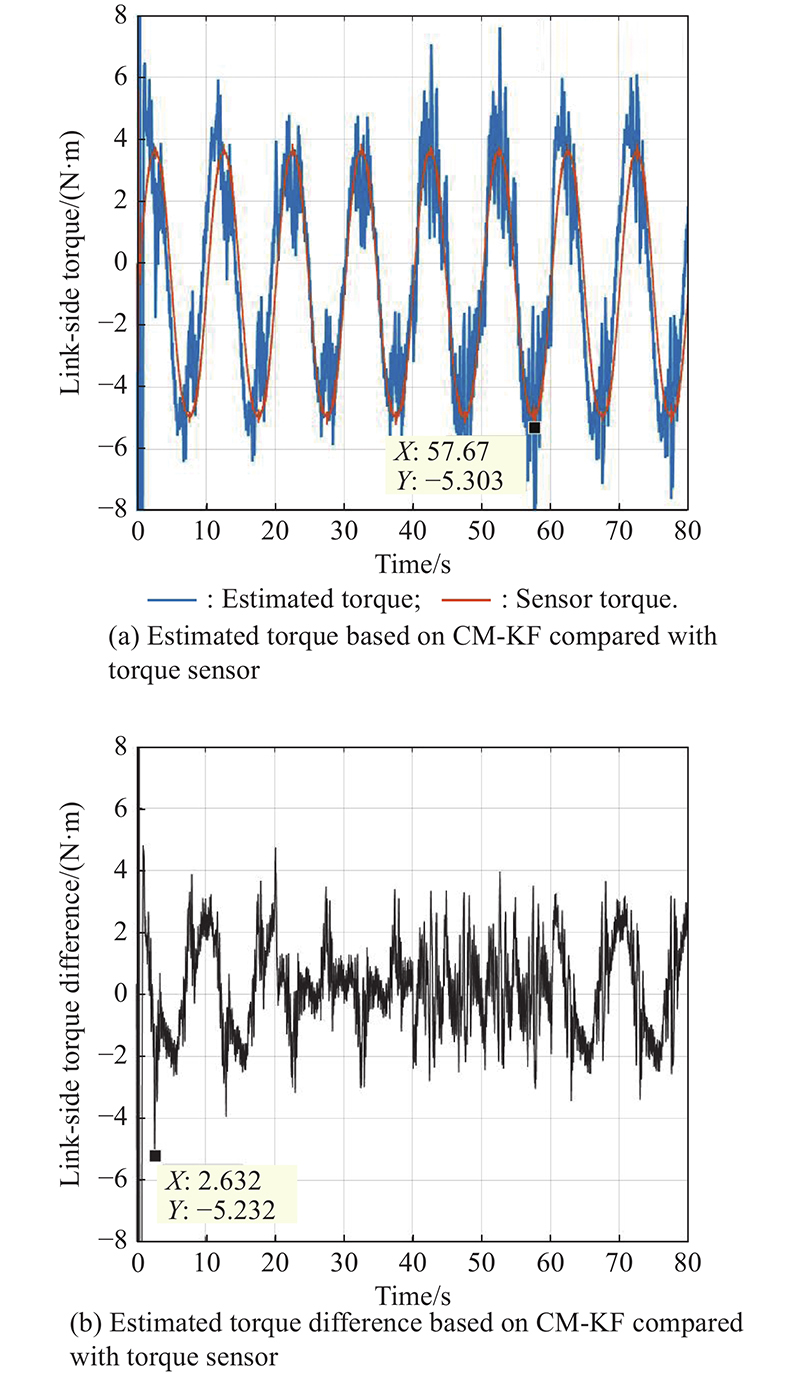
Fig 16
Estimated position difference based on CM-KF compared with torque sensor"
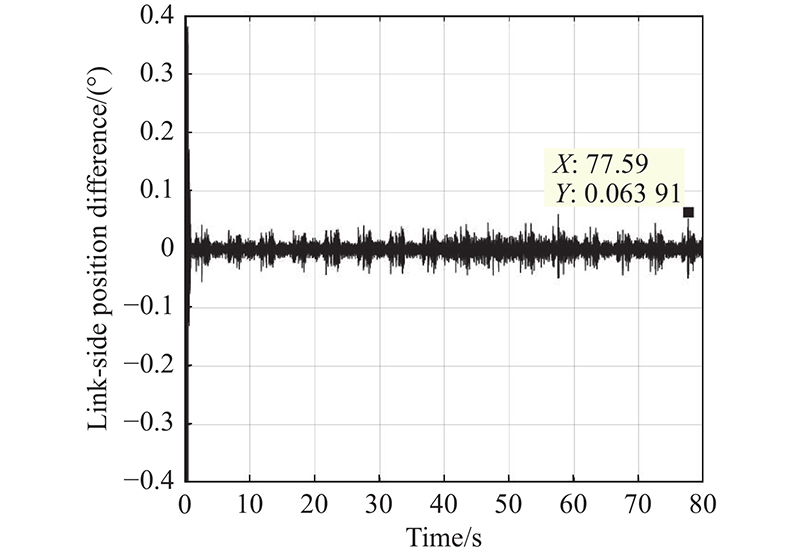
Fig 17
Estimated torque and related difference based on CM-UKF compared with torque sensor"
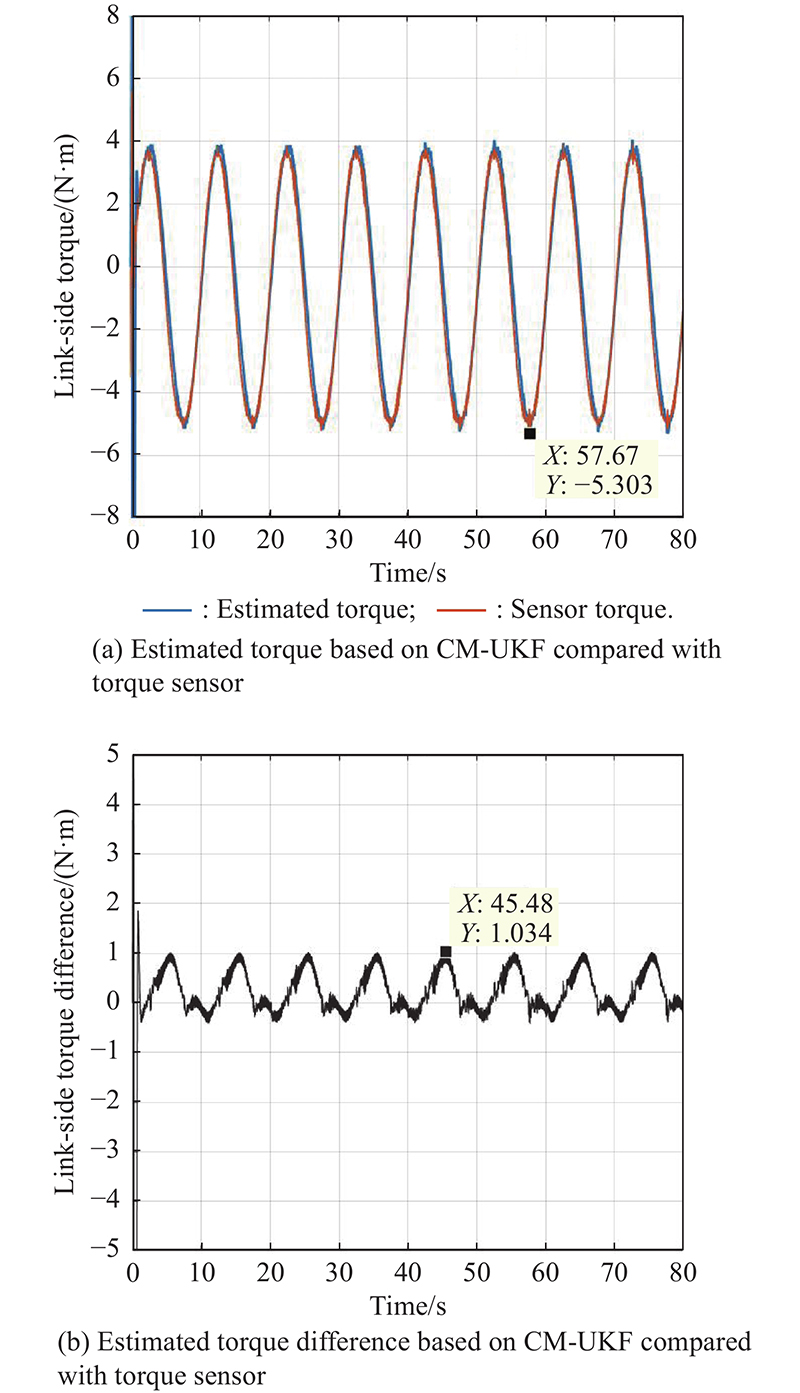
Fig 18
Estimated position difference based on CM-UKF compared with torque sensor"
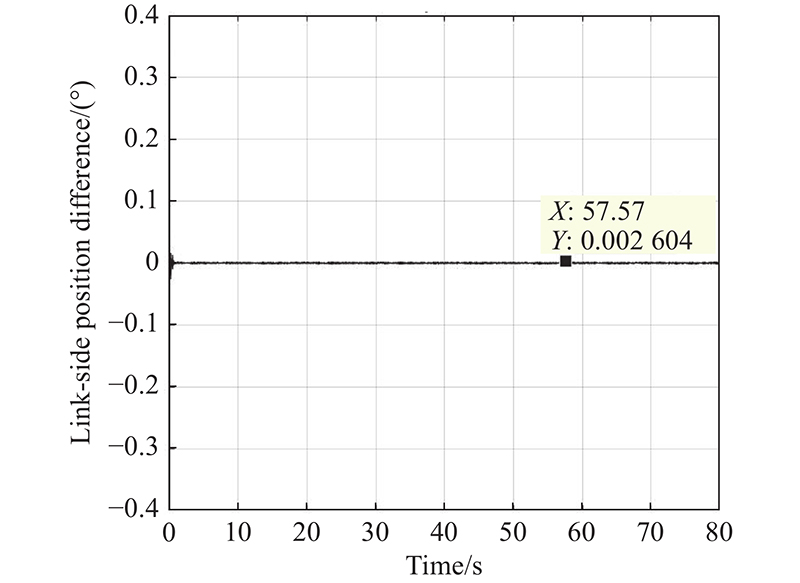
Table 2
Results of experiments running with a relative low frequency and large amplitude torque"
| Model | Maximum torque difference/(N·m) | RMS of the torque difference/(N·m) | Maximum position difference/(°) |
| CM | 2.430 | 1.1723 | 0.2188 |
| CM-KF | 5.232 | 2.9487 | 0.06391 |
| CM-UKF | 1.034 | 0.0482 | 0.0002604 |
| 1 |
AGHILI F, NAMVAR M Adaptive control of manipulators using uncalibrated joint-torque sensing. IEEE Trans. on Robotics, 2006, 22 (4): 854- 860.
doi: 10.1109/TRO.2006.875489 |
| 2 |
YANG G C, LIU Y C, JIN M H A new control method of flexible-joint manipulator with harmonic drive. Proc. of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2020, 234 (9): 1868- 1883.
doi: 10.1177/0954406219899697 |
| 3 | RAMADURAI S, KOSARI S N, KING H H, et al Application of unscented Kalman filter to a cable driven surgical robot: a simulation study. Proc. of the IEEE International Conference on Robotics and Automation, 2012, 1495- 1500. |
| 4 | ULRICH S, SASIADEK J Z Extended Kalman filtering for flexible joint space robot control. Proc. of the American Control Conference, 2011, 1021- 1026. |
| 5 | HE W, GAO H J, ZHOU C, et al Reinforcement learning control of a flexible two-link manipulator: an experimental investigation. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2021, 51 (12): 7326- 7336. |
| 6 | TSETSERUKOU D, TADAKUMA R, KAJIMOTO H, et al Optical torque sensors for implementation of local impedance control of the arm of humanoid robot. Proc. of the IEEE International Conference on Robotics and Automation, 2006, 1674- 1679. |
| 7 |
JUNG B, KIM B, KOO J C, et al Joint torque sensor embedded in harmonic drive using order tracking method for robotic application. IEEE/ASME Trans. on Mechatronics, 2017, 22 (4): 1594- 1599.
doi: 10.1109/TMECH.2017.2694039 |
| 8 | PAN X N, WANG H G, JIANG Y A Torque measuring method for robot joints with harmonic drives. Advanced Materials Research, 2013, 694/697, 981- 986. |
| 9 |
ZHANG H X, RYOO Y J, BYUN K S Development of torque sensor with high sensitivity for joint of robot manipulator using 4-Bar linkage shape. Sensors, 2016, 16 (7): 991.
doi: 10.3390/s16070991 |
| 10 | LIU G, ABDUL S, GOLDENBERG A A Distributed modular and reconfigurable robot control with torque sensing. Proc. of the International Conference on Mechatronics and Automation, 2006, 384- 389. |
| 11 |
LIU G J, ABDUL S, GOLDENBERG A A Distributed control of modular and reconfigurable robot with torque sensing. Robotica, 2008, 26 (1): 75- 84.
doi: 10.1017/S0263574707003608 |
| 12 | ZHANG H W, AHMAD S, LIU G J Torque estimation technique of robotic joint with harmonic drive transmission. Proc. of the IEEE International Conference on Robotics and Automation, 2013, 3034- 3039. |
| 13 |
ZHANG H W, AHMAD S, LIU G J Torque estimation for robotic joint with harmonic drive transmission based on position measurements. IEEE Trans. on Robotics, 2015, 31 (2): 322- 330.
doi: 10.1109/TRO.2015.2402511 |
| 14 |
LIGHTCAP C A, BANKS S A An extended Kalman filter for real-time estimation and control of a rigid-link flexible-joint manipulator. IEEE Trans. on Control Systems Technology, 2010, 18 (1): 91- 103.
doi: 10.1109/TCST.2009.2014959 |
| 15 | NAERUM E, KING H H, HANNAFORD B Robustness of the unscented Kalman filter for state and parameter estimation in an elastic transmission. Robotics: Science and Systems, 2010, 5, 193- 200. |
| 16 | YU F, XIAO S, ZHU M H, et al A novel method to improve the accuracy of torque estimation for robotic joint with harmonic drive transmission. Engineering Letters, 2018, 26 (4): 455- 460. |
| 17 | TECHNOLOGIES H D. CSD and SHD ultra-flat component sets and gearheads. https://www.harmonicdrive.net/_hd/content/catalogs/pdf/csd-shd-catalog.pdf. |
| 18 |
ZHANG H W, AHMAD S, LIU G J Modeling of torsional compliance and hysteresis behaviors in harmonic drives. IEEE/ASME Trans. on Mechatronics, 2015, 20 (1): 178- 185.
doi: 10.1109/TMECH.2014.2311382 |
| 19 |
KIRCANSKI N M, GOLDENBERG A A An experimental study of nonlinear stiffness, hysteresis, and friction effects in robot joints with harmonic drives and torque sensors. The International Journal of Robotics Research, 1997, 16 (2): 214- 239.
doi: 10.1177/027836499701600207 |
| 20 |
RUDERMAN M, HOFFMANN F, BERTRAM T Modeling and identification of elastic robot joints with hysteresis and backlash. IEEE Trans. on Industrial Electronics, 2009, 56 (10): 3840- 3847.
doi: 10.1109/TIE.2009.2015752 |
| 21 | SHI Z G, LIU G J Torque estimation of robot joint with harmonic drive transmission using a redundant adaptive robust extended Kalman filter. Proc. of the International Conference on Robotics and Automation, 2014, 6382- 6387. |
| 22 |
SEO J, YU M J, PARK C G, et al An extended robust H∞ filter for nonlinear constrained uncertain systems . IEEE Trans. on Signal Processing, 2006, 54 (11): 4471- 4475.
doi: 10.1109/TSP.2006.880308 |
| 23 |
SZABAT K, WROBEL K, DROD K, et al A fuzzy unscented Kalman filter in the adaptive control system of a drive system with a flexible joint. Energies, 2020, 13 (8): 2056- 2074.
doi: 10.3390/en13082056 |
| 24 |
YAN Y S, YU L T, LI C S, et al UKF-based motion estimation of cable-driven forceps for robot-assisted surgical system. IEEE Access, 2020, 8, 94912- 94922.
doi: 10.1109/ACCESS.2020.2992457 |
| 25 | HAGHIGHIPANAH M, LI Y, MIYASAKA M, et al Improving position precision of a servo-controlled elastic cable driven surgical robot using unscented Kalman filter. Proc. of the IEEE/RSJ International Conference on Intelligent Robots & Systems, 2015, 2030- 2036. |
| 26 | HAGHIGHIPANAH M, MIYASAKA M, LI Y, et al Unscented Kalman filter and 3D vision to improve cable driven surgical robot joint angle estimation. Proc. of the IEEE International Conference on Robotics & Automation, 2016, 4135- 4142. |
| 27 |
URREA C, MUNOZ R Joints position estimation of a redundant Scara robot by means of the unscented Kalman filter and inertial sensors. Asian Journal of Control, 2016, 18 (2): 481- 493.
doi: 10.1002/asjc.1111 |
| 28 | ROYA E, ESMAEIL A M Nonlinear H∞ control for uncertain flexible joint robots with unscented Kalman filter . Journal of Artificial Intelligence in Electrical Engineering, 2014, 2 (8): 40- 47. |
| [1] | Keyi LI, Zhengkun GUO, Gongjian ZHOU. State estimation in range coordinate using range-only measurements [J]. Journal of Systems Engineering and Electronics, 2022, 33(3): 497-510. |
| [2] | Muhammad WASIM, Ahsan ALI. Airship aerodynamic model estimation using unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1318-1329. |
| [3] | Changyun Liu, Penglang Shui, Gang Wei, and Song Li. Modified unscented Kalman filter using modified filter gain and variance scale factor for highly maneuvering target tracking [J]. Journal of Systems Engineering and Electronics, 2014, 25(3): 380-385. |
| [4] | Halil Ersin S¨oken and Chingiz Hajiyev. REKF and RUKF for pico satellite attitude estimation in the presence of measurement faults [J]. Journal of Systems Engineering and Electronics, 2014, 25(2): 288-297. |
| [5] | Fang Deng, Jie Chen, and Chen Chen. Adaptive unscented Kalman filter for parameter and state estimation of nonlinear high-speed objects [J]. Journal of Systems Engineering and Electronics, 2013, 24(4): 655-665. |
| [6] | Yali Wang and Wenhai Wang. Failure prognostic of systems with hidden degradation process [J]. Journal of Systems Engineering and Electronics, 2012, 23(2): 314-324. |
| [7] | Xianming Xie and Yiming Pi. Phase noise filtering and phase unwrapping method based on unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2011, 22(3): 365-372. |
| [8] | Jin Liu, Jie Ma, and Jinwen Tian. Pulsar/CNS integrated navigation based on federated UKF [J]. Journal of Systems Engineering and Electronics, 2010, 21(4): 675-681. |
| [9] | Dan Li, Jianye Liu, Li Qiao, and Zhi Xiong. Fault tolerant navigation method for satellite based on information fusion and unscented Kalman filter [J]. Journal of Systems Engineering and Electronics, 2010, 21(4): 682-687. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||