
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (3): 783-797.doi: 10.23919/JSEE.2023.000075
• CONTROL THEORY AND APPLICATION • Previous Articles
Hua CHEN1,2,*( ), Chao SHEN1(), Jiahui HUANG1(), Yuhan CAO3()
), Chao SHEN1(), Jiahui HUANG1(), Yuhan CAO3()
Received:2022-05-06
Online:2023-06-15
Published:2023-06-30
Contact:
Hua CHEN
E-mail:chenhua112@163.com;1277220206@qq.com;1353988290@qq.com;1371615921@qq.com
About author:Supported by:Hua CHEN, Chao SHEN, Jiahui HUANG, Yuhan CAO. Event-triggered model-free adaptive control for a class of surface vessels with time-delay and external disturbance via state observer[J]. Journal of Systems Engineering and Electronics, 2023, 34(3): 783-797.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
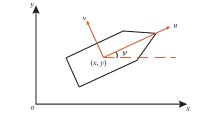
Fig 1
SV model"
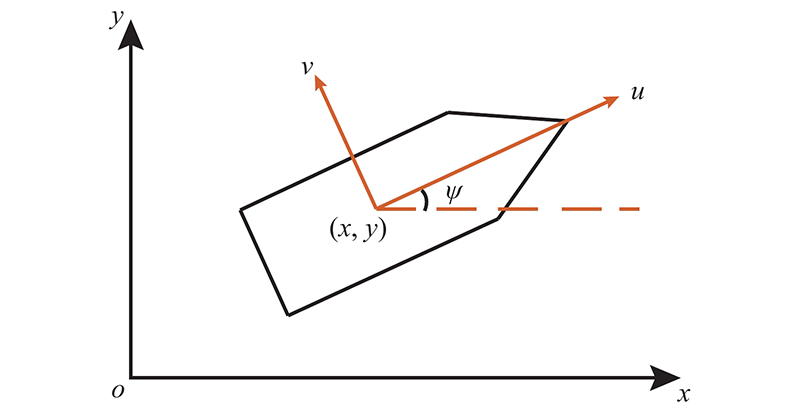

Fig 2
Block diagram of DESO-MFAC control system"
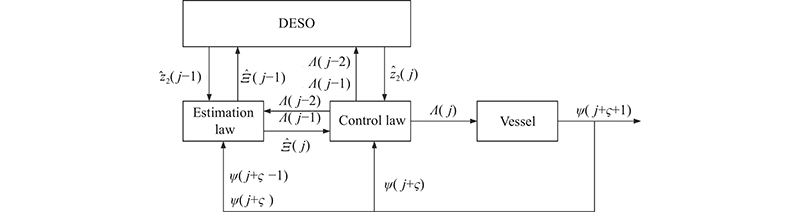

Fig 3
Principle of desired angle compensation"
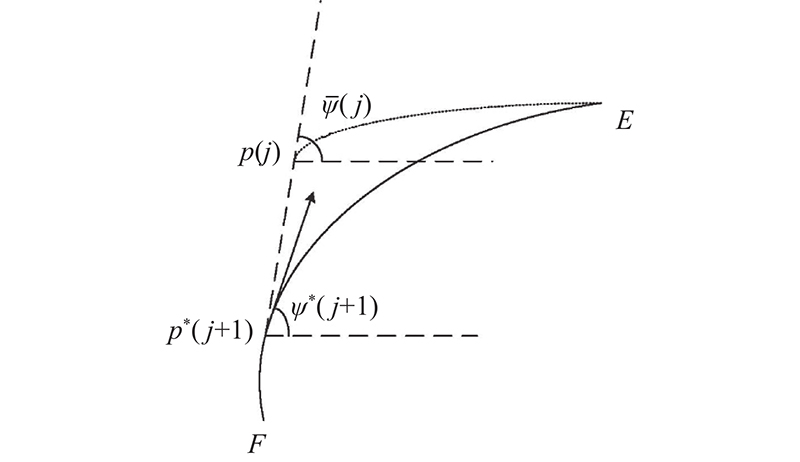

Fig 4
Block diagram of DESO-MFAC control system with coordinate compensation"
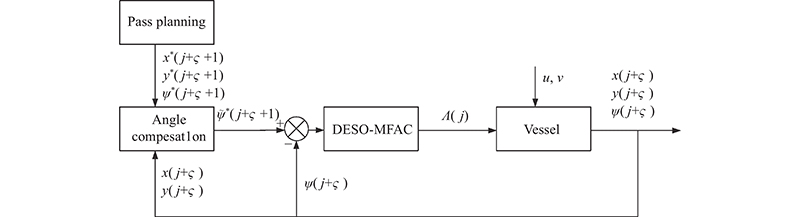
Table 1
Time of different algorithms"
| Parameter | Value |
| | 1.0 |
| | 0.1 |
| | 0.1 |
| | 0.992 |
| | 0.1 |
| | 0.1 |
| | 0.8 |
| | 0.2 |
| | 0.01 |
Fig 5
Angle tracking error of ET-DESO-MFAC method with coordinate compensation"
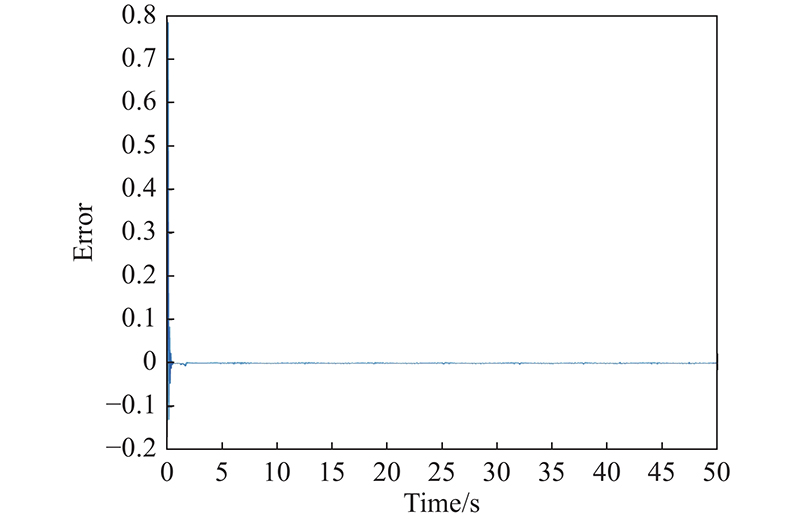
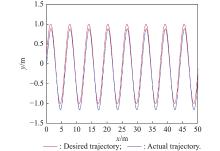
Fig 6
Trajectory tracking of ET-DESO-MFAC method with coordinate compensation"
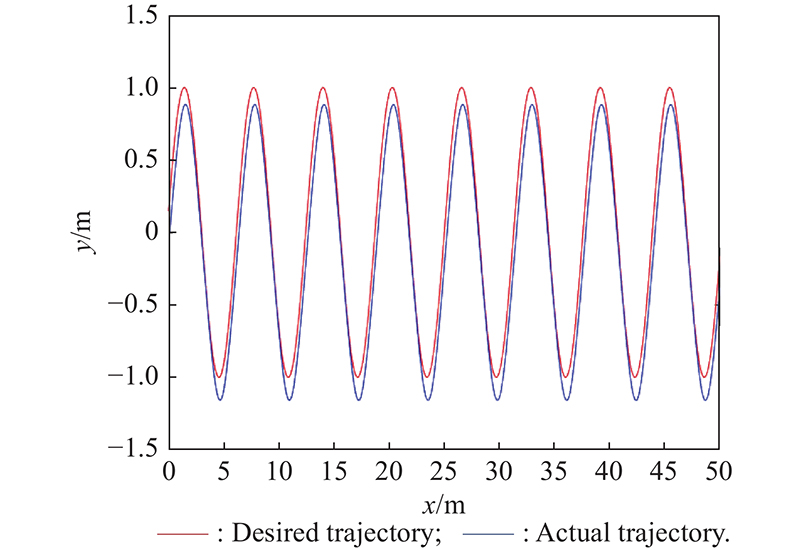
Fig 7
Trajectory tracking of DESO-MFAC method"
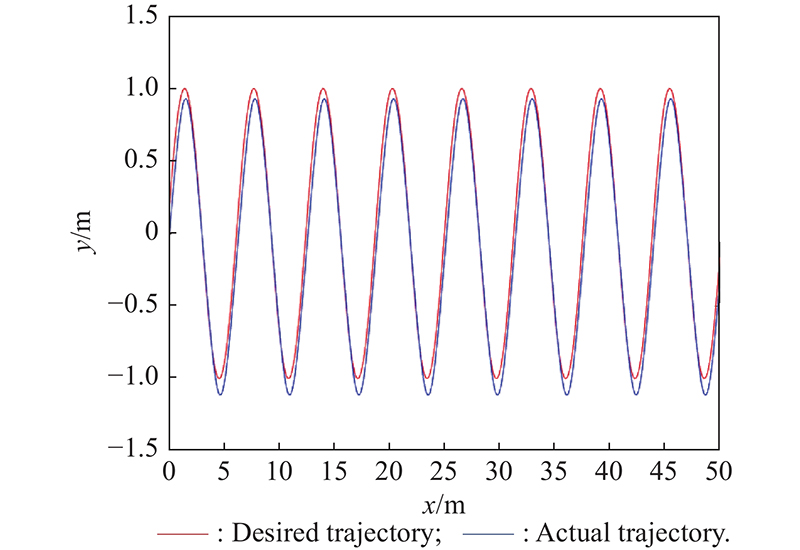
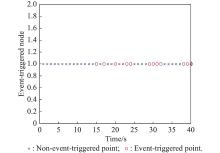
Fig 8
Event-triggered points"
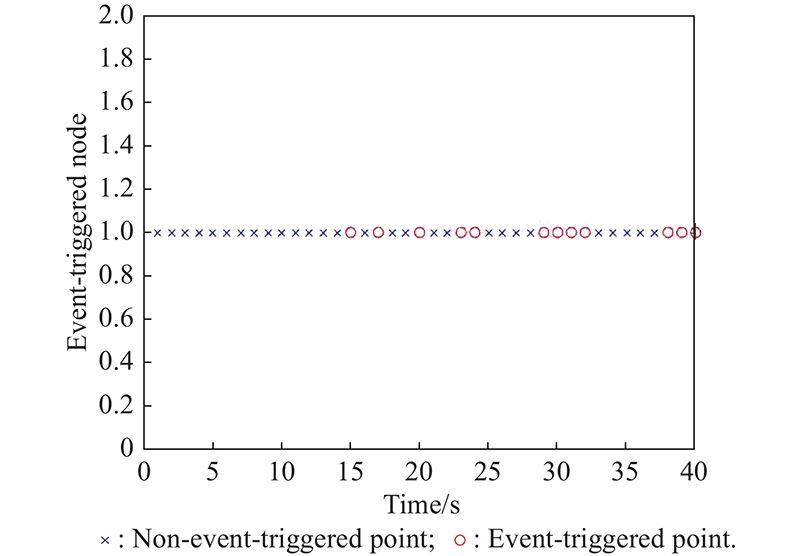
Fig 9
Change of control law"
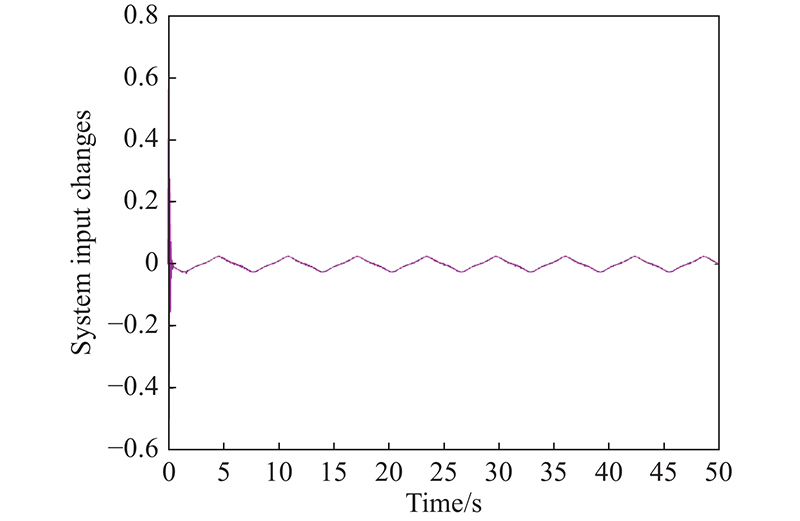
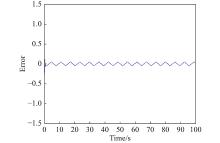
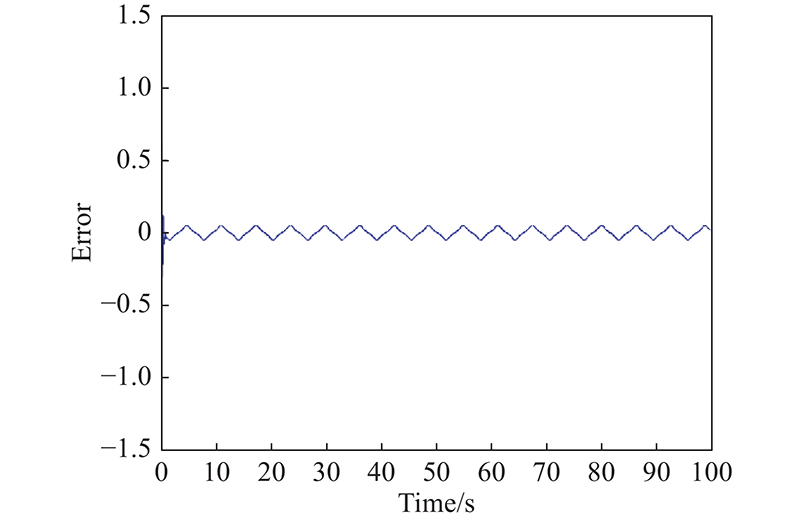
Fig 10
DESO error"
| 1 |
NAEEM W, XU T, TIANO A The design of a navigation, guidance, and control system for an unmanned surface vehicle for environmental monitoring. Proceedings of the Institution of Mechanical Engineers Part M Journal of Engineering for the Maritime Environment, 2008, 222 (2): 67- 79.
doi: 10.1243/14750902JEME80 |
| 2 |
CACCIA M, BIBULI M, BONO R, et al Unmanned surface vehicle for coastal and protected waters applications: the charlie project. Marine Technology Society Journal, 2007, 41 (2): 62- 71.
doi: 10.4031/002533207787442259 |
| 3 | PRABHU T Unmanned surface vehicle(USV) for coastal surveillance. International Journal of Mechanical Engineering and Technology, 2016, 7, 13- 28. |
| 4 | WANG J H, GU W, ZHU J X, et al. An unmanned surface vehicle for multi-mission applications. Proc. of the International Conference on Electronic Computer Technology, 2009: 358−361. |
| 5 | QIAO L, ZHANG W D Adaptive non-singular integral terminal sliding mode tracking control for autonomous underwater vehicles. IET Control Theory & Applications, 2017, 11 (8): 1293- 1306. |
| 6 |
CHEN H, ZHANG B W, ZHAO T B, et al Finite-time tracking control for extended nonholonomic chained-form systems with parametric uncertainty and external disturbance. Journal of Vibration and Control, 2018, 24 (1): 100- 109.
doi: 10.1177/1077546316633568 |
| 7 | CHEN H Robust stabilization for a class of dynamic feedback uncertain nonholonomic mobile robots with input saturation. International Journal of Control Automation & Systems, 2014, 12 (6): 1216- 1224. |
| 8 |
XU J, WANG M, QIAO L Dynamical sliding mode control for the trajectory tracking of underactuated unmanned underwater vehicles. Ocean Engineering, 2015, 105, 54- 63.
doi: 10.1016/j.oceaneng.2015.06.022 |
| 9 | LI X D, LI P Stability of time-delay systems with impulsive control involving stabilizing delays. Automatica, 2020, 124, 109336. |
| 10 |
YUAN J X, QIU Z, WANG F X Sliding mode observer controller design for a two-dimensional aeroelastic system with gust load. Asian Journal of Control, 2019, 21 (1): 130- 142.
doi: 10.1002/asjc.1902 |
| 11 |
AN H, FIDAN B, WU Q Q Sliding mode differentiator based tracking control of uncertain nonlinear systems with application to hypersonic flight. Asian Journal of Control, 2019, 21 (1): 143- 155.
doi: 10.1002/asjc.1932 |
| 12 | LIU Y C, ZHU Q D. Adaptive fuzzy control for ship autopilot with course constraint based on event-triggered mechanism. Proc. of the 7th International Conference on Information, Cybernetics, and Computational Social Systems, 2020: 175−179. |
| 13 |
DU J L, GUO C, YU S H, et al Adaptive autopilot design of time-varying uncertain ships with completely unknown control coefficient. IEEE Journal of Oceanic Engineering, 2007, 32 (2): 346- 352.
doi: 10.1109/JOE.2007.893684 |
| 14 |
VELAGIC J, VUKIC Z, OMERDIC E Adaptive fuzzy ship autopilot for track-keeping. Control Engineering Practice, 2003, 11 (4): 433- 443.
doi: 10.1016/S0967-0661(02)00009-6 |
| 15 |
DIMAROGONAS D, FRAZZOLI E, JOHANSSON K Distributed event-triggered control for multi-agent systems. IEEE Trans. on Automatic Control, 2012, 57 (5): 1291- 1297.
doi: 10.1109/TAC.2011.2174666 |
| 16 |
LI S, AHN C K, GUO J, et al Neural-network approximation-based adaptive periodic event-triggered output-feedback control of switched nonlinear systems. IEEE Trans. on Cybernetics, 2021, 51 (8): 4011- 4020.
doi: 10.1109/TCYB.2020.3022270 |
| 17 |
LI M, LI S, AHN C K, et al Adaptive fuzzy event-triggered command-filtered control for nonlinear time-delay systems. IEEE Trans. on Fuzzy Systems, 2022, 30 (4): 1025- 1035.
doi: 10.1109/TFUZZ.2021.3052095 |
| 18 | SUN Y J, LIU Y, TIAN X C. Realization of coordinate compensation algorithm in numerical control for steel grating flame cutting system. Proc. of the Chinese Automation Congress, 2017: 2266−2270. |
| 19 |
MA Y H, LI Y, JIANG L, et al A compensation algorithm of tool path for grinding wheel wear in solid cutting tool flank grinding. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture, 2022, 236 (3): 245- 254.
doi: 10.1177/09544054211028843 |
| 20 | HOU Z S, DONG H R, JIN S T Model-free adaptive control with coordinates compensation for automatic car parking systems. Acta Automatica Sinica, 2015, 41 (4): 823- 831. |
| 21 | GRABMAIR G, MAYR S, HOCHWALLNER M, et al. Model based control design-a free tool-chain. Proc. of the European Control Conference, 2014: 826 −831. |
| 22 |
GAN M G, ZHANG M, MA H X, et al Adaptive control of a servo system based on multiple models. Asian Journal of Control, 2016, 18 (2): 652- 663.
doi: 10.1002/asjc.1201 |
| 23 |
WANG Y, WEI X Z, ZHANG H Dynamic event-based control of nonlinear stochastic systems. IEEE Trans. on Automatic Control, 2017, 62 (12): 6544- 6551.
doi: 10.1109/TAC.2017.2707520 |
| 24 |
LIU Y, BU R X, GAO X R Ship trajectory tracking control system design based on sliding mode control algorithm. Polish Maritime Research, 2018, 25 (3): 26- 34.
doi: 10.2478/pomr-2018-0093 |
| 25 | SHEN Z P, ZHANG X L, ZHANG N, et al Recursive sliding mode dynamic surface output feedback control for ship trajectory tracking based on neural network observer. Control Theory and Applications, 2018, 35 (8): 1092- 1100. |
| 26 | HOU Z S On model-free adaptive control: the state of the art and perspective. Control Theory and Applications, 2006, 23 (4): 586- 592. |
| 27 |
HOU Z S, JIN S T Data-driven model-free adaptive control for a class of mimo nonlinear discrete-time systems. IEEE Trans. on Neural Networks, 2011, 22 (12): 2173.
doi: 10.1109/TNN.2011.2176141 |
| 28 |
HOU Z S, WANG Z From model-based control to data-driven control: survey, classification and perspective. Information Sciences, 2013, 235, 3- 35.
doi: 10.1016/j.ins.2012.07.014 |
| 29 | CAO Z Q, CAO R M, HOU Z S, et al Multiple input multiple output model free adaptive contour control for two-dimensional linear motor. Control Theory and Applications, 2020, 37 (5): 1007- 1017. |
| 30 |
GAO H, MA G F, GUO Y N, et al Data-driven model-free adaptive attitude control of partially constrained combined spacecraft with external disturbances and input saturation. Chinese Journal of Aeronautics, 2019, 32 (5): 1281- 1293.
doi: 10.1016/j.cja.2019.01.018 |
| 31 | WANG J H, TAN G X, SUN C M. Research on vehicle four-wheel steering based on model-free adaptive control. Proc. of the 5th International Conference on Electromechanical Control Technology and Transportation, 2020: 372−376. |
| 32 | YAO W L, LIU Y, ZHANG J D, et al. Ship electrical propulsion control system based on improved model-free adaptive control. Proc. of the 26th Chinese Control and Decision Conference, 2014: 1526−1529. |
| 33 |
TUTSOY O, BARKANA D E Model free adaptive control of the under-actuated robot manipulator with the chaotic dynamics. ISA Transactions, 2021, 118, 106- 115.
doi: 10.1016/j.isatra.2021.02.006 |
| 34 |
HUANG Y, WANG J Z, SHI D W, et al Performance assessment of discrete-time extended state observers: theoretical and experimental results. IEEE Trans. on Circuits and Systems I: Regular Papers, 2018, 65 (7): 2256- 2268.
doi: 10.1109/TCSI.2017.2780161 |
| 35 |
CHI R H, HUI Y, ZHANG S H, et al Discrete-time extended state observer-based model-free adaptive control via local dynamic linearization. IEEE Trans. on Industrial Electronics, 2020, 67 (10): 8691- 8701.
doi: 10.1109/TIE.2019.2947873 |
| 36 | HOU M D, WANG Y S Data-driven trajectory tracking sliding mode constraint control for wheeled mobile robot. Control and Decision, 2020, 35 (6): 1353- 1360. |
| 37 | FOSSEN T. Guidance and control of ocean vehicle. New York: John Wiley & Sons, 1994. |
| 38 | ZHOU P, ZHANG S, WEN L, et al Kalman filter-based data-driven robust model-free adaptive predictive control of a complicated industrial process. IEEE Trans. on Automation Science and Engineering, 2022, 19 (2): 788- 803. |
| 39 |
DONG N, LYU W J, ZHU S, et al Anti-noise model-free adaptive control and its application in the circulating fluidized bed boiler. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2021, 235 (8): 1472- 1481.
doi: 10.1177/0959651820979376 |
| 40 | HOU Z S, JIN S T. Model free adaptive control: theory and applications. New York: John Wiley & Sons, 2013. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||