
Journal of Systems Engineering and Electronics ›› 2020, Vol. 31 ›› Issue (5): 1019-1030.doi: 10.23919/JSEE.2020.000076
• Control Theory and Application • Previous Articles Next Articles
Enjiao ZHAO1,*( ), Zenan ZHONG1(), Xin ZHENG2()
), Zenan ZHONG1(), Xin ZHENG2()
Received:2012-12-06
Online:2020-10-01
Published:2020-10-30
Contact:
Enjiao ZHAO
E-mail:zhaoenjiao935@163.com;zhongzenan@hrbeu.edu.cn;felgus@126.com
About author:ZHAO Enjiao was born in 1989. She received her B.S. and M.S. degrees from Harbin Engineering University, Harbin, China, in 2011 and 2013, respectively. She received her Ph.D. degree in control science and engineering from the School of Astronautics, Harbin Institute of Technology in 2018. She is currently a lecturer in Harbin Engineering University. Her current research interests include cooperative control and formation control of multiple flight vehicles. E-mail: Supported by:Enjiao ZHAO, Zenan ZHONG, Xin ZHENG. Finite-time control of formation system for multiple flight vehicles subject to actuator saturation[J]. Journal of Systems Engineering and Electronics, 2020, 31(5): 1019-1030.
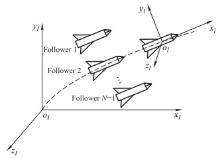
Fig 1
Leader-follower relative coordinate"
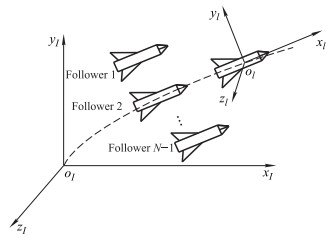
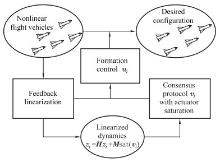
Fig 2
Formation control based on consensus theory"
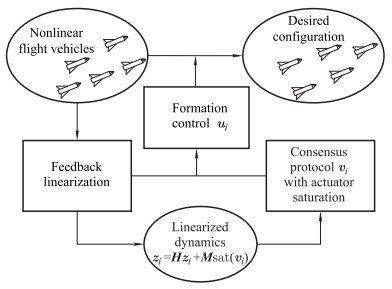
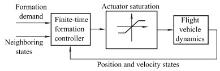
Fig 3
Finite-time formation control structure with actuator saturation"
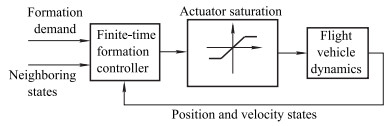
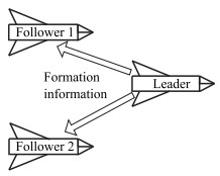
Fig 4
Communication topology of flight vehicles"
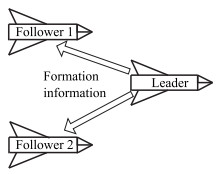
Table 1
Initial condition of flight vehicles"
| Flight vehicle | (x, y, z)/m | θ/(°) | ψV/(°) | V/(m·s-1) |
| Leader | (2 000, 500, 0) | 0 | 0 | 240 |
| Follower 1 | (900, 500, 700) | 10 | 10 | 240 |
| Follower 2 | (900, 500, -700) | 10 | 10 | 240 |
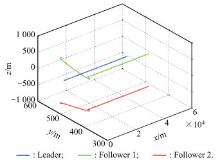
Fig 5
Flight trajectories in Case 1"
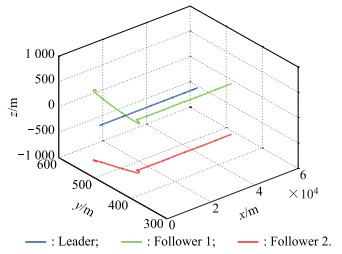
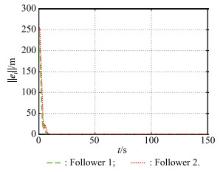
Fig 6
Position track errors $|e_i|$ in Case 1"
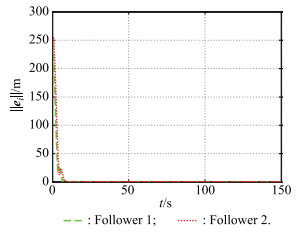
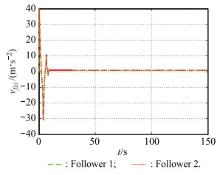
Fig 7
Bounded control input $v_{fxi}$ in Case 1"
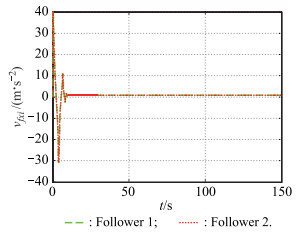
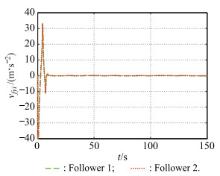
Fig 8
Bounded control input $v_{fyi}$ in Case 1"
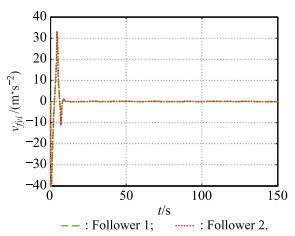
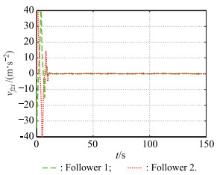
Fig 9
Bounded control input $v_{fzi}$ in Case 1"
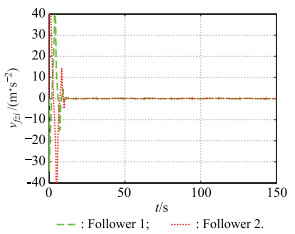
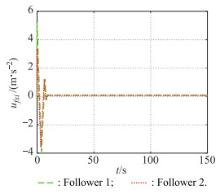
Fig 10
Origin control input $u_{fxi}$ in Case 1"
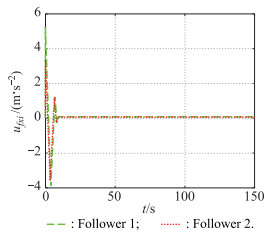
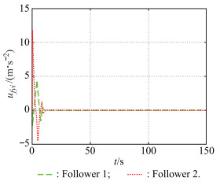
Fig 11
Origin control input $u_{fyi}$ in Case 1"
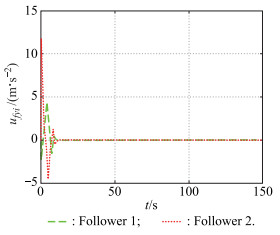
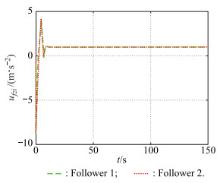
Fig 12
Origin control input $u_{fzi}$ in Case 1"
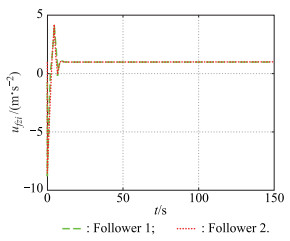
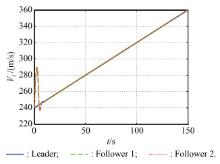
Fig 13
Velocity $V_i$ in Case 1"
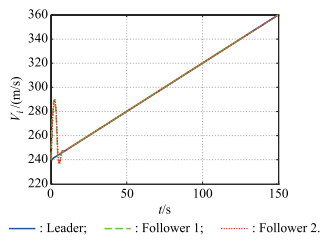
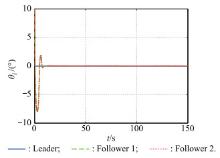
Fig 14
Flight-path angle $\mathit{\theta _i}$ in Case 1"
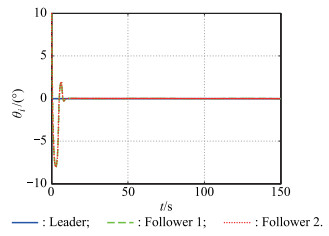
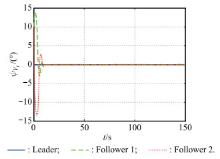
Fig 15
Heading angle $\mathit{\psi _{V_i}}$ in Case 1"
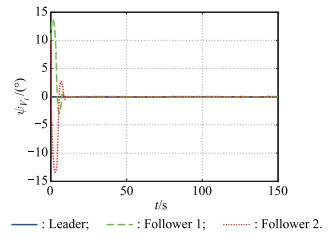
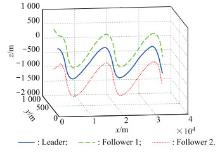
Fig 16
Flight trajectories in Case 2"
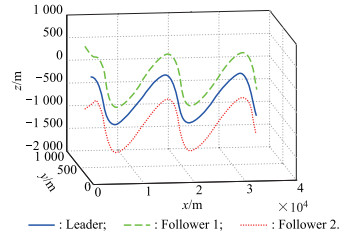
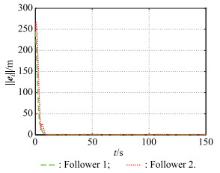
Fig 17
Position track errors $\mathit{|e_i|}$ in Case 2"
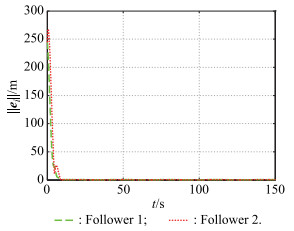
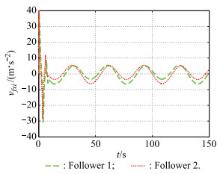
Fig 18
Bounded control input $\mathit{v_{fxi}}$ in Case 2"
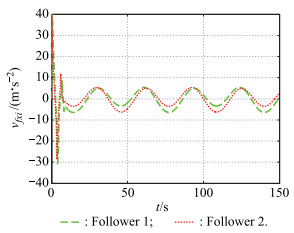
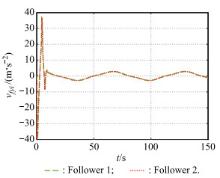
Fig 19
Bounded control input $\mathit{v_{fyi}}$ in Case 2"
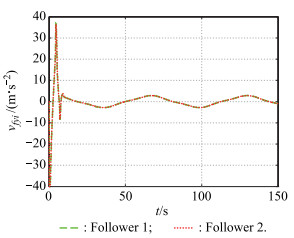
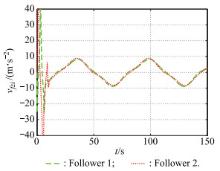
Fig 20
Bounded control input $\mathit{v_{fzi}}$ in Case 2"
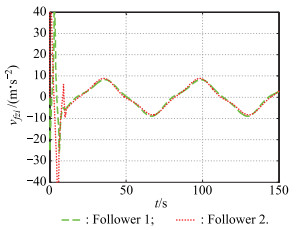
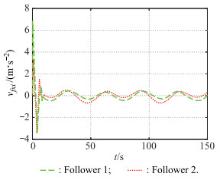
Fig 21
Origin control input $\mathit{v_{fxi}}$ in Case 2"
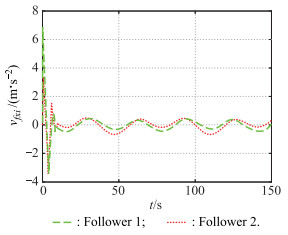
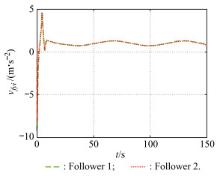
Fig 22
Origin control input $\mathit{v_{fyi}}$ in Case 2"
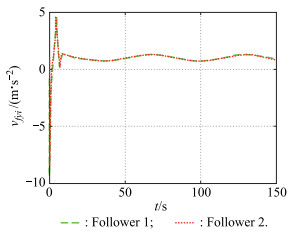
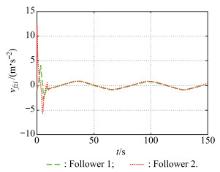
Fig 23
Origin control input $\mathit{{v_{fzi}}}$ in Case 2"
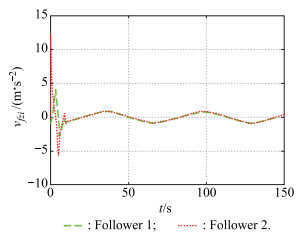
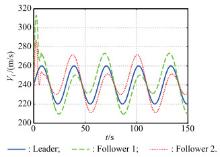
Fig 24
Velocity $\mathit{V_i}$ in Case 2"
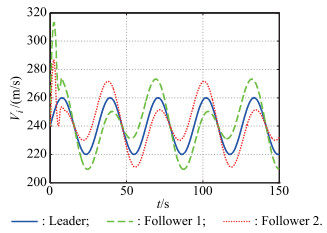
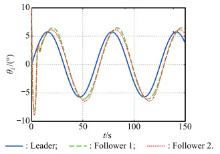
Fig 25
Flight-path angle $\mathit{\theta _i}$ in Case 2"
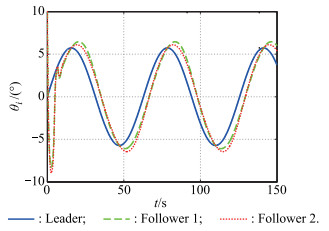
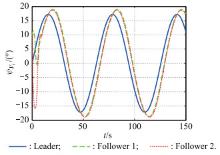
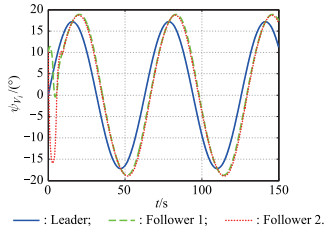
Fig 26
Heading angle $\mathit{\psi _{V_i}}$ in Case 2"
| 1 |
ZHUANG Y F, HUANG H B, SHARMA S, et al. Cooperative path planning of multiple autonomous underwater vehicles operating in dynamic ocean environment. ISA Transactions, 2019, 94, 174- 186.
doi: 10.1016/j.isatra.2019.04.012 |
| 2 | JING G, WANG L. Multiagent flocking with angle-based formation shape control. IEEE Trans. on Automatic Control, 2020, 65 (2): 817- 823. |
| 3 |
YU J L, DONG X W, LI Q D, et al. Cooperative guidance strategy for multiple hypersonic gliding vehicles system. Chinese Journal of Aeronautics, 2020, 33 (3): 990- 1005.
doi: 10.1016/j.cja.2019.12.003 |
| 4 |
CHANDRA K P B, DAROUACH M. Two-stage information filters for single and multiple sensors, and their square-root versions. Automatica, 2018, 98, 20- 27.
doi: 10.1016/j.automatica.2018.09.001 |
| 5 |
HAN L, XIE Y X, LI X D, et al. Time-varying group formation tracking control for second-order multi-agent systems with communication delays and multiple leaders. Journal of the Franklin Institute, 2020, 357 (14): 9761- 9780.
doi: 10.1016/j.jfranklin.2020.07.048 |
| 6 | XU J. Fault tolerant finite-time leader-follower formation control for autonomous surface vessels with LOS range and angle constraints. Automatica, 2016, 68, 228- 236. |
| 7 | SHOJAEI K. Leader-follower formation control of underactuated autonomous marine surface vehicles with limited torque. Ocean Engineering, 2015, 105, 196- 205. |
| 8 |
YANG Z W, ZHU S Y, CHEN C L, et al. Leader-follower formation control of nonholonomic mobile robots with bearing-only measurements. Journal of the Franklin Institute, 2020, 357 (3): 1628- 1643.
doi: 10.1016/j.jfranklin.2019.11.025 |
| 9 | CAI Z H, WANG L H, ZHAO J, et al. Virtual target guidance-based distributed model predictive control for formation control of multiple UAVs. Chinese Journal of Aeronautics, 2020, 33 (3): 1037- 1056. |
| 10 |
GU N, WANG D, PENG Z H, et al. Distributed containment maneuvering of uncertain under-actuated unmanned surface vehicles guided by multiple virtual leaders with a formation. Ocean Engineering, 2019, 187, 105996.
doi: 10.1016/j.oceaneng.2019.04.077 |
| 11 |
WANG J N, XIN M. Integrated optimal formation control of multiple unmanned aerial vehicles. IEEE Trans. on Control System Technology, 2013, 21 (5): 1731- 1744.
doi: 10.1109/TCST.2012.2218815 |
| 12 |
LAWTON J R, BEARD R W, YOUNG B. A decentralized approach to formation maneuvers. IEEE Journal on Robotics and Automation, 2003, 19 (6): 933- 941.
doi: 10.1109/TRA.2003.819598 |
| 13 | NIU X, LIU Y, MAN Y. Adaptive leader-following consensus for uncertain nonlinear multi-agent systems. Asian Journal of Control, 2017, 19 (3): 1189- 1196. |
| 14 | KANG S, AHN H. Design and realization of distributed adaptive formation control law for multi-agent systems with moving leader. IEEE Trans. on Industrial Electronics, 2014, 63 (2): 1268- 1279. |
| 15 |
ARTEAGA-PÉREZ A M, NUÑO E. Velocity observer design for the consensus in delayed robot networks. Journal of the Franklin Institute, 2018, 355 (14): 6810- 6829.
doi: 10.1016/j.jfranklin.2018.07.001 |
| 16 | REN W. Consensus strategies for cooperative control of vehicle formations. IET Control Theory and Applications, 2007, 1 (2): 505- 512. |
| 17 |
LIN Z, WANG L, HAN Z, et al. Distributed formation control of multi-agent systems using complex laplacian. IEEE Trans. on Automatic Control, 2014, 59 (7): 1765- 1777.
doi: 10.1109/TAC.2014.2309031 |
| 18 |
REZAEEE H, ABDOLLAHI F. Pursuit formation of double-integrator dynamics using consensus control approach. IEEE Trans. on Industrial Electronics, 2015, 62 (7): 4249- 4256.
doi: 10.1109/TIE.2014.2384479 |
| 19 |
ZHAI D H, XIA Y. Adaptive control for teleoperation system with varying time delays and input saturation constraints. IEEE Trans. on Industrial Electronics, 2016, 63 (11): 6921- 6929.
doi: 10.1109/TIE.2016.2583199 |
| 20 |
ZHAI D H, XIA Y. Finite-time control of teleoperation systems with input saturation and varying time delays. IEEE Trans. on System, Man, and Cybernetics: Systems, 2017, 47 (7): 1522- 1534.
doi: 10.1109/TSMC.2016.2631601 |
| 21 |
WANG Q, PENG C, GAO H, et al. Global consensus of single-integrator agents subject to saturation constraints. IET Control Theory and Applications, 2014, 8 (9): 765- 771.
doi: 10.1049/iet-cta.2013.0402 |
| 22 |
LI Y, XIANG J, WEI W. Consensus problems for linear time invariant multi-agent systems with saturation constraints. IET Control Theory and Applications, 2011, 5 (6): 823- 829.
doi: 10.1049/iet-cta.2009.0299 |
| 23 |
GUAN Z H, SUN F L, WANG Y W, et al. Finite-time consensus for leader-following second-order multi-agent networks. IEEE Trans. on Circuits and Systems I: Regular Paper, 2012, 59 (11): 2646- 2654.
doi: 10.1109/TCSI.2012.2190676 |
| 24 | HONG Y, XU Y, HUANG J. Finite-time control for robot manipulators. System and Control Letter, 2002, 46 (4): 243- 253. |
| [1] | Yuanyuan TU, Dayi WANG, Wenbo LI. Reconfigurability evaluation method for input-constrained control systems [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1023-1030. |
| [2] | Juan Antonio VAZQUEZ TREJO, Adrien GUENARD, Manuel ADAM-MEDINA, Jean-Christophe PONSART, Laurent CIARLETTA, Damiano ROTONDO, Didier THEILLIOL. Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles [J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1014-1022. |
| [3] | Biao YANG, Wuxing JING, Changsheng GAO. Three-dimensional cooperative guidance law for multiple missiles with impact angle constraint [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1286-1296. |
| [4] | Kada BELKACEM, Khalid MUNAWAR, Shafique Shaikh MUHAMMAD. Distributed cooperative control of autonomous multi-agent UAV systems using smooth control [J]. Journal of Systems Engineering and Electronics, 2020, 31(6): 1297-1307. |
| [5] | Yandong LI, Ling ZHU, Yuan GUO. Observer-based multivariable fixed-time formation control of mobile robots [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 403-414. |
| [6] | Ping MA, Denghui ZHANG, Songyan WANG, Tao CHAO. Integrated guidance and control design method based on finite-time state observer [J]. Journal of Systems Engineering and Electronics, 2018, 29(6): 1251-1262. |
| [7] | Jianguo GUO, Yuchao LIU, Jun ZHOU. Integral terminal sliding mode control for nonlinear systems [J]. Journal of Systems Engineering and Electronics, 2018, 29(3): 571-579. |
| [8] | Li Yuan, Guangfu Ma, Chuanjiang Li, and Boyan Jiang. Finite-time attitude tracking control for spacecraft without angular velocity measurements#br# [J]. Journal of Systems Engineering and Electronics, 2017, 28(6): 1174-1185. |
| [9] | Ri Liu, Xiuxia Sun, Wenhan Dong, and Dong Wang. Finite-time adaptive sliding mode control for heavyweight airdrop operations [J]. Systems Engineering and Electronics, 2017, 28(2): 338-346. |
| [10] | Zhanshan Zhao, Hongru Gu, Jing Zhang, and Gang Ding. Terminal sliding mode control based on super-twisting algorithm [J]. Systems Engineering and Electronics, 2017, 28(1): 145-. |
| [11] | Kun Zhang and Xiaoguang Gao. Distributed tracking control of unmanned aerial vehicles under wind disturbance and model uncertainty [J]. Journal of Systems Engineering and Electronics, 2016, 27(6): 1262-1271. |
| [12] | Chutiphon Pukdeboon. Adaptive backstepping finite-time sliding mode control of spacecraft attitude tracking [J]. Journal of Systems Engineering and Electronics, 2015, 26(4): 826-. |
| [13] | Maopeng Ran, Qing Wang, Chaoyang Dong, and Maolin Ni. Simultaneous anti-windup synthesis for linear systems subject to actuator saturation [J]. Journal of Systems Engineering and Electronics, 2015, 26(1): 119-. |
| [14] | Yong Guo, Shenmin Song, and Liwei Deng. Finite-time coordination control for formation flying spacecraft [J]. Journal of Systems Engineering and Electronics, 2014, 25(5): 859-867. |
| [15] | Li Song, Qinghe Wu, Di Yu, and Yinqiu Wang. Distributed stereoscopic rotating formation control of networks of second-order agents [J]. Journal of Systems Engineering and Electronics, 2013, 24(3): 480-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||