
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (2): 259-268.doi: 10.23919/JSEE.2022.000026
• ELECTRONICS TECHNOLOGY • Previous Articles Next Articles
Jun HAN( ), Weixing LI*(), Kai FENG(), Feng PAN()
), Weixing LI*(), Kai FENG(), Feng PAN()
Received:2020-09-25
Accepted:2022-02-15
Online:2022-05-06
Published:2022-05-06
Contact:
Weixing LI
E-mail:3120190878@bit.edu.cn;liweixing@bit.edu.cn;fengkai_bit@outlook.com;andropanfeng@126.com
About author:Supported by:Jun HAN, Weixing LI, Kai FENG, Feng PAN. Vision-based aerial image mosaicking algorithm with object detection[J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 259-268.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks

Fig 1
Overall workflow of our proposed algorithm"
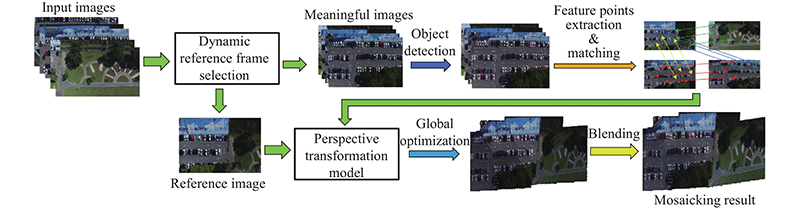

Fig 2
Results of our feature extraction and matching method"


Fig 3
Excessive overlap v.s. appropriate overlap"
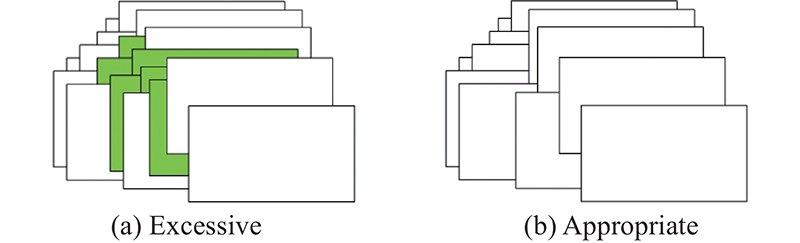

Fig 4
Adaptively selecting Frame 10 as the reference"
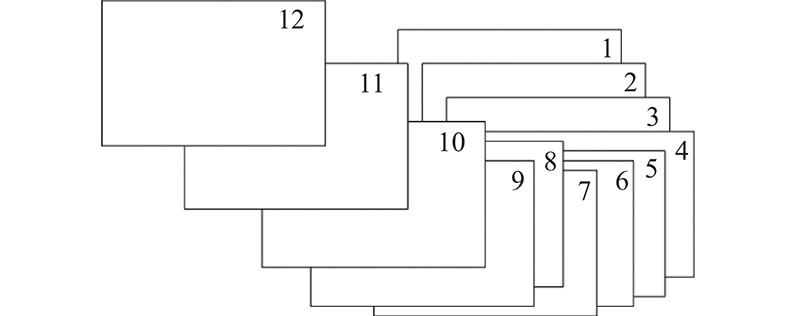

Fig 5
Mosaicking results of different reference frame selections"
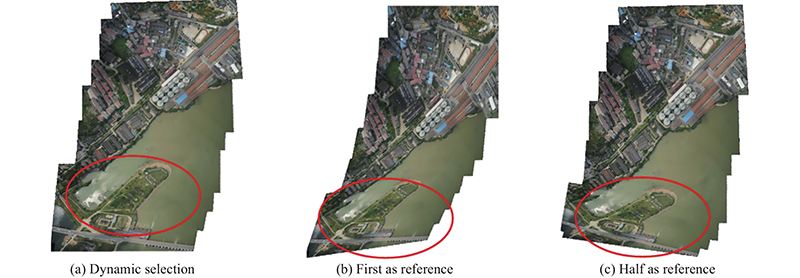

Fig 6
Mosaicking results of Dataset 1"
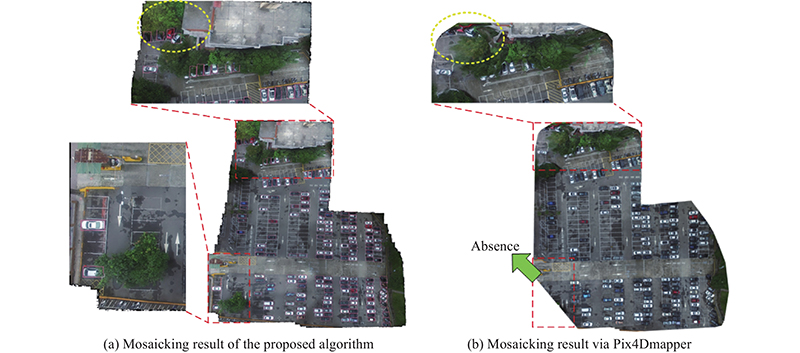

Fig 7
Mosaicking results of Dataset 2"
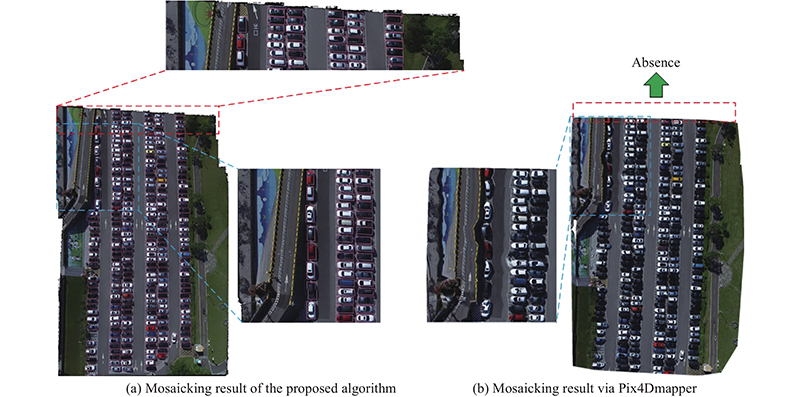
Fig 8
Mosaicking results of Dataset 3"
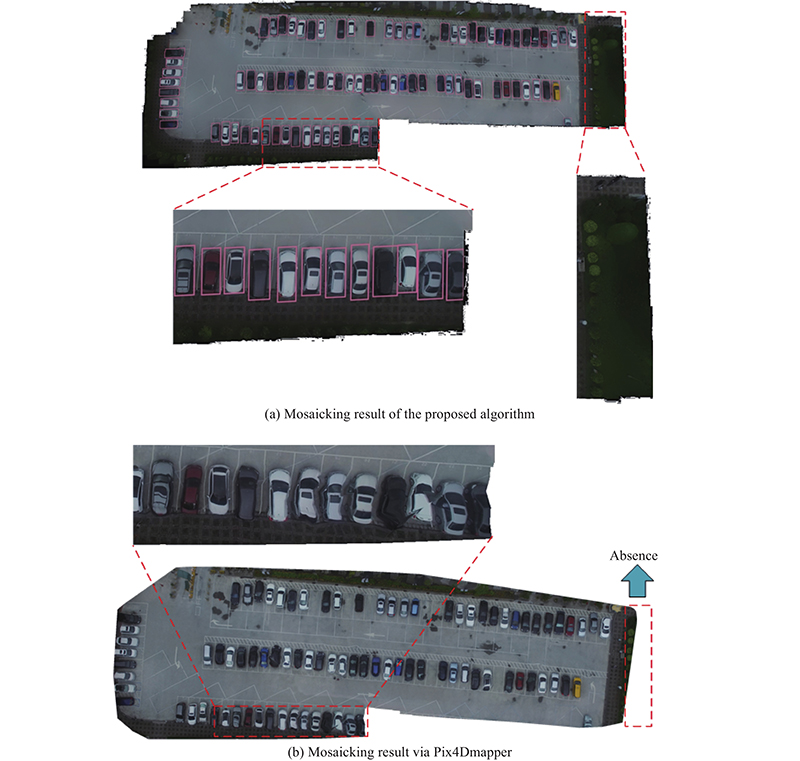

Fig 9
Mosaicking results of Dataset 4"
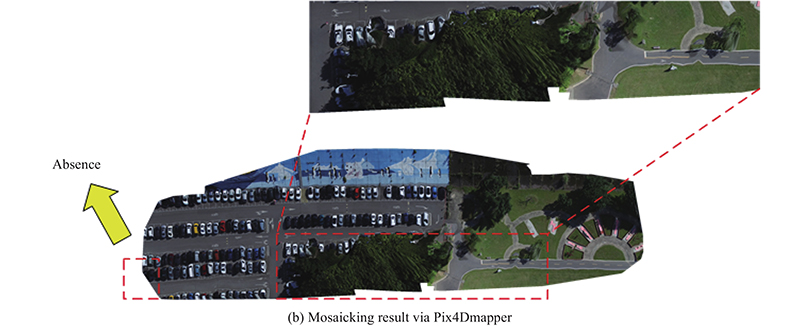

Fig 10
Mosaicking result of data in the paper"

Fig 9
"
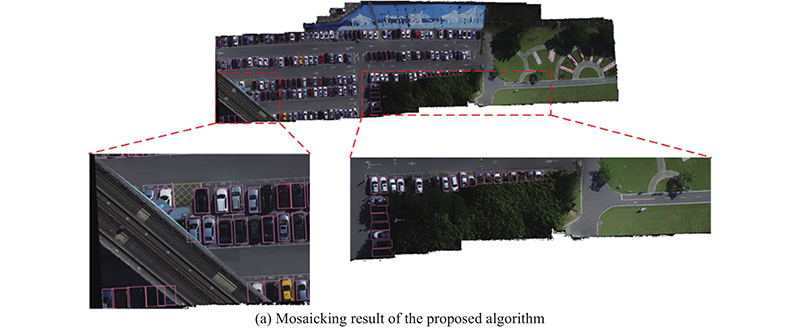
Table 1
Time cost comparison"
| Image data | Sequence length | Mosaicking time/s | |
| Pix4Dmapper | Ours | ||
| Dataset 1 | 71 | 169 | 14 |
| Dataset 2 | 37 | 92 | 8 |
| Dataset 3 | 40 | 113 | 7 |
| Dataset 4 | 24 | 58 | 4 |
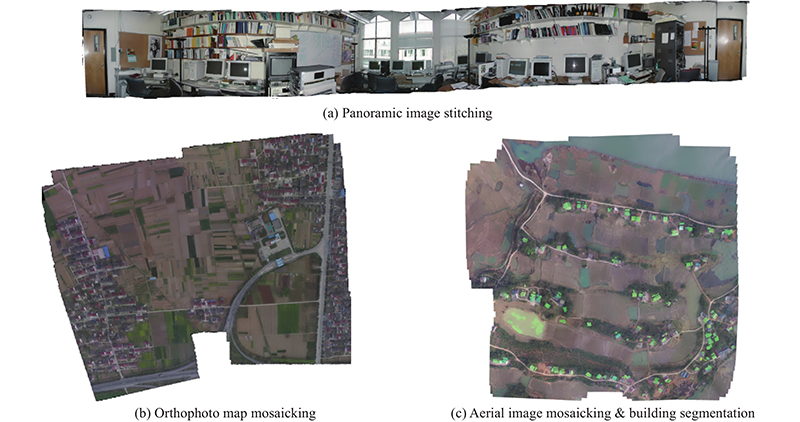
Fig 11
Extended applications of our proposed method"
| 1 |
CUI J G, LIU M, ZHANG Z T, et al Robust UAV thermal infrared remote sensing images stitching via overlap-prior-based global similarity prior model. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14, 270- 282.
doi: 10.1109/JSTARS.2020.3032011 |
| 2 |
LIU C, ZHANG S H, AKBAR A Ground feature oriented path planning for unmanned aerial vehicle mapping. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12 (4): 1175- 1187.
doi: 10.1109/JSTARS.2019.2899369 |
| 3 | BU S H, ZHAO Y, WAN G, et al Map2DFusion: real-time incremental UAV image mosaicing based on monocular SLAM. Proc. of the IEEE International Conference on Intelligent Robots and Systems, 2016, 4564- 4571. |
| 4 |
ZHANG J M, ZHU H Q, WANG P Y, et al ATT squeeze U-Net: a lightweight network for forest fire detection and recognition. IEEE Access, 2021, 9, 10858- 10870.
doi: 10.1109/ACCESS.2021.3050628 |
| 5 |
CAO Y C, YANG F, TANG Q F, et al An attention enhanced bidirectional LSTM for early forest fire smoke recognition. IEEE Access, 2019, 7, 154732- 154742.
doi: 10.1109/ACCESS.2019.2946712 |
| 6 |
AVOLA D, CINQUE L, FORESTI G L, et al A UAV video dataset for mosaicking and change detection from low-altitude flights. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2020, 50 (6): 2139- 2149.
doi: 10.1109/TSMC.2018.2804766 |
| 7 | SZELISKI R Image alignment and stitching: a tutorial. Boston: Now Foundations and Trends, 2006. |
| 8 |
ZITOVA B, FLUSSER J Image registration methods: a survey. Image and Vision Computing, 2003, 21 (11): 977- 1000.
doi: 10.1016/S0262-8856(03)00137-9 |
| 9 |
LOWE D G Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 2004, 60 (2): 91- 110.
doi: 10.1023/B:VISI.0000029664.99615.94 |
| 10 |
BAY H, ESS A, TUYTELAARS T, et al Speeded-up robust features (SURF). Computer Vision and Image Understanding, 2008, 110 (3): 346- 359.
doi: 10.1016/j.cviu.2007.09.014 |
| 11 | RUBLEE E, RABAUD V, KONOLIGE K, et al ORB: an efficient alternative to SIFT or SURF. Proc. of the IEEE International Conference on Computer Vision, 2011, 2564- 2571. |
| 12 | EDWARD R, REID B P, TOM D Faster and better: a machine learning approach to corner detection. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2010, 32 (1): 105- 119. |
| 13 | BIAN J W, LIN W Y, LIU Y, et al GMS: grid-based motion statistics for fast, ultra-robust feature correspondence. Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017, 2828- 2837. |
| 14 |
AN M, JIANG Z G, ZHAO D P High speed robust image registration and localization using optimized algorithm and its performances evaluation. Journal of Systems Engineering and Electronics, 2010, 21 (3): 520- 526.
doi: 10.3969/j.issn.1004-4132.2010.03.026 |
| 15 | AMIRI A J, MORADI H Real-time video stabilization and mosaicking for monitoring and surveillance. Proc. of the 4th International Conference on Robotics and Mechatronics, 2016, 613- 618. |
| 16 | LI C, GUO B L, GUO X X, et al Real-time UAV imagery stitching based on grid-based motion statistics. Journal of Physics: Conference Series, 2018, (1069): 012163. |
| 17 |
MCLAUCHLAN P F, JAENICKE A Image mosaicing using sequential bundle adjustment. Image and Vision Computing, 2002, 20 (9/10): 751- 759.
doi: 10.1016/S0262-8856(02)00064-1 |
| 18 |
XU Q, CHEN J, LUO L B, et al UAV image mosaicking based on multiregion guided local projection deformation. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13, 3844- 3855.
doi: 10.1109/JSTARS.2020.3006289 |
| 19 |
WU F L, GUAN H N, YAN D J, et al Precise geometric correction and robust mosaicking for airborne lightweight optical butting infrared imaging system. IEEE Access, 2019, 7, 93569- 93579.
doi: 10.1109/ACCESS.2019.2928380 |
| 20 |
LI M, LI D R, GUO B X, et al Automatic seam-line detection in UAV remote sensing image mosaicking by use of graph cuts. International Journal of Geo-Information, 2018, 7 (9): 361.
doi: 10.3390/ijgi7090361 |
| 21 |
YUAN Y T, FANG F M, ZHANG G X Superpixel-based seamless image stitching for UAV images. IEEE Trans. on Geoscience and Remote Sensing, 2021, 59 (2): 1565- 1576.
doi: 10.1109/TGRS.2020.2999404 |
| 22 | GE Y, WEN G J, YANG X L A fast mosaicking method for small UAV image sequence using a small number of ground control points. Proc. of the 8th International Conference on Intelligent Human-Machine Systems and Cybernetics, 2016, 90- 94. |
| 23 | REDMON J, FARHADI A. YOLOv3: an incremental improvement. arXiv preprint arXiv: 1804.02767, 2018. |
| 24 |
XU Y H, OU J L, HE H, et al Mosaicking of unmanned aerial vehicle imagery in the absence of camera poses. Remote Sensing, 2016, 8 (3): 204.
doi: 10.3390/rs8030204 |
| 25 | HU J W, ZHOU Y H, ZHAO C H, et al An application of panoramic mosaic in UAV aerial image. Proc. of the IEEE 13th International Conference on Control and Automation, 2017, 1049- 1053. |
| 26 |
QU Z, LI J, BAO K H An unordered image stitching method based on binary tree and estimated overlapping area. IEEE Trans. on Image Processing, 2020, 29, 6734- 6744.
doi: 10.1109/TIP.2020.2993134 |
| 27 |
JI Y F, LI W X, FENG K, et al Automatic video mosaicking algorithm via dynamic key-frame. Journal of Systems Engineering and Electronics, 2020, 31 (2): 272- 278.
doi: 10.23919/JSEE.2020.000005 |
| 28 | HSIEH M R, LIN Y L, HSU W H Drone-based object counting by spatially regularized regional proposal network. Proc. of the IEEE International Conference on Computer Vision, 2017, 4165- 4173. |
| [1] | Xiaoli WU, Wentao WEI, Sabrina CALDWELL, Chengqi XUE, Linlin WANG. Optimization method for a radar situation interface from error-cognition to information feature mapping [J]. Journal of Systems Engineering and Electronics, 2022, 33(4): 924-937. |
| [2] | Yangyang JIANG, Yan GAO, Wenqi SONG, Yue LI, Quan QUAN. Bibliometric analysis of UAV swarms [J]. Journal of Systems Engineering and Electronics, 2022, 33(2): 406-425. |
| [3] | Tao YE, Zongyang ZHAO, Jun ZHANG, Xinghua CHAI, Fuqiang ZHOU. Low-altitude small-sized object detection using lightweight feature-enhanced convolutional neural network [J]. Journal of Systems Engineering and Electronics, 2021, 32(4): 841-853. |
| [4] | Yufeng JI, Weixing LI, Kai FENG, Boyang XING, Feng PAN. Automatic video mosaicking algorithm via dynamic key-frame [J]. Journal of Systems Engineering and Electronics, 2020, 31(2): 272-278. |
| [5] | Zhenxing ZHANG, Rennong YANG, Huanyu LI, Yuhuan FANG, Zhenyu HUANG, Ying ZHANG. Antlion optimizer algorithm based on chaos search and its application [J]. Journal of Systems Engineering and Electronics, 2019, 30(2): 352-365. |
| [6] | Baojun ZHAO, Boya ZHAO, Linbo TANG, Wenzheng WANG, Chen WU. Multi-scale object detection by top-down and bottom-up feature pyramid network [J]. Journal of Systems Engineering and Electronics, 2019, 30(1): 1-12. |
| [7] | Jinbo CHEN, Zhiheng WANG, Hengyu LI. Real-time object segmentation based on convolutional neural network with saliency optimization for picking [J]. Journal of Systems Engineering and Electronics, 2018, 29(6): 1300-1307. |
| [8] | Shuxia Guo, Yafeng,Ruibing Liu, and Ying Gao. Multi-dimensional and complicated electromagnetic interference hardware-in-the-loop simulation method [J]. Systems Engineering and Electronics, 2015, 26(6): 1142-1148. |
| [9] | Rui Yao and Yanning Zhang. Compressive sensing for small moving space object detection in astronomical images [J]. Journal of Systems Engineering and Electronics, 2012, 23(3): 378-384. |
| [10] | Qunming Wang, Liguo Wang, and Danfeng Liu. Integration of spatial attractions between and within pixels for sub-pixel mapping [J]. Journal of Systems Engineering and Electronics, 2012, 23(2): 293-303. |
| [11] | Qinkun Xiao, Nan Zhang, Fei Li, and Yue Gao. Object detection based on combination of local and spatial information [J]. Journal of Systems Engineering and Electronics, 2011, 22(4): 715-720. |
| [12] | Fuzhen Zhu, Jinzong Li, Bing Zhu, and Dongdong Ma. Super-resolution image reconstruction based on three-step-training neural networks [J]. Journal of Systems Engineering and Electronics, 2010, 21(6): 934-940. |
| [13] | Jing Li, Junzheng Wang, and Wei Shen. Moving object detection in framework of compressive sampling [J]. Journal of Systems Engineering and Electronics, 2010, 21(5): 740-745. |
| [14] | Jianjun Zhang and Hong Yuan. Analysis of unmanned aerial vehicle navigation and height control system based on GPS [J]. Journal of Systems Engineering and Electronics, 2010, 21(4): 643-649. |
| [15] | Zheng Liping, Li Guangyao, Liang Yongquan & Sha Jing. Design of ontology mapping framework and improvement of similarity computation [J]. Journal of Systems Engineering and Electronics, 2007, 18(3): 641-645. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||