
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (6): 1550-1564.doi: 10.23919/JSEE.2022.000098
• SYSTEMS ENGINEERING • Previous Articles Next Articles
Jinming LIU( ), Yingguo CHEN(), Rui WANG(), Yingwu CHEN()
), Yingguo CHEN(), Rui WANG(), Yingwu CHEN()
Received:2021-03-22
Online:2023-12-18
Published:2023-12-29
Contact:
Yingguo CHEN
E-mail:liujinming1998@163.com;argguo@163.com;ruiwangnudt@gmail.com;ywchen@nudt.edu.cn
About author:Supported by:Jinming LIU, Yingguo CHEN, Rui WANG, Yingwu CHEN. Complex task planning method of space-aeronautics cooperative observation based on multi-layer interaction[J]. Journal of Systems Engineering and Electronics, 2023, 34(6): 1550-1564.
Table 1
Types of collaborative resource observation tasks"
| Task type | Definition |
| Stationary point target task | A point, a small observation area, or an observation of a building |
| Regional target task | Large continuous area |
| Cooperative target task | Coordinated observation of a target from multiple resources |
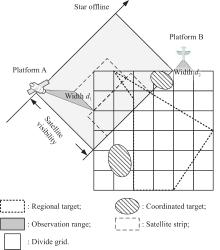
Fig 1
Schematic diagram of meshing"
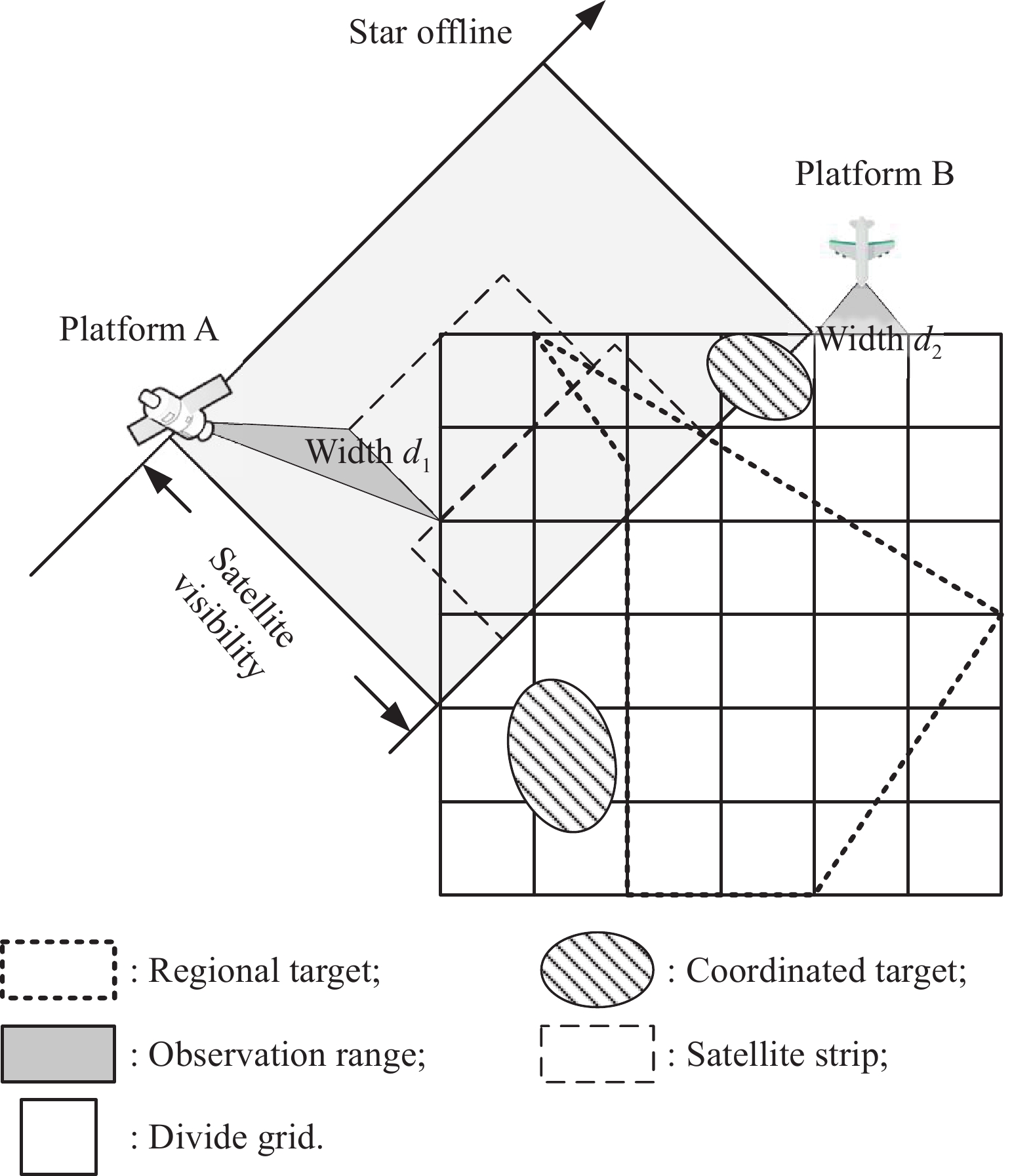
Fig 2
Schematic diagram of point target clustering"
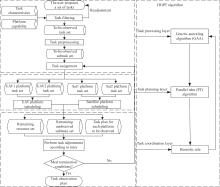
Fig 3
Complex task planning framework for coordinated space-aeronautics observation"
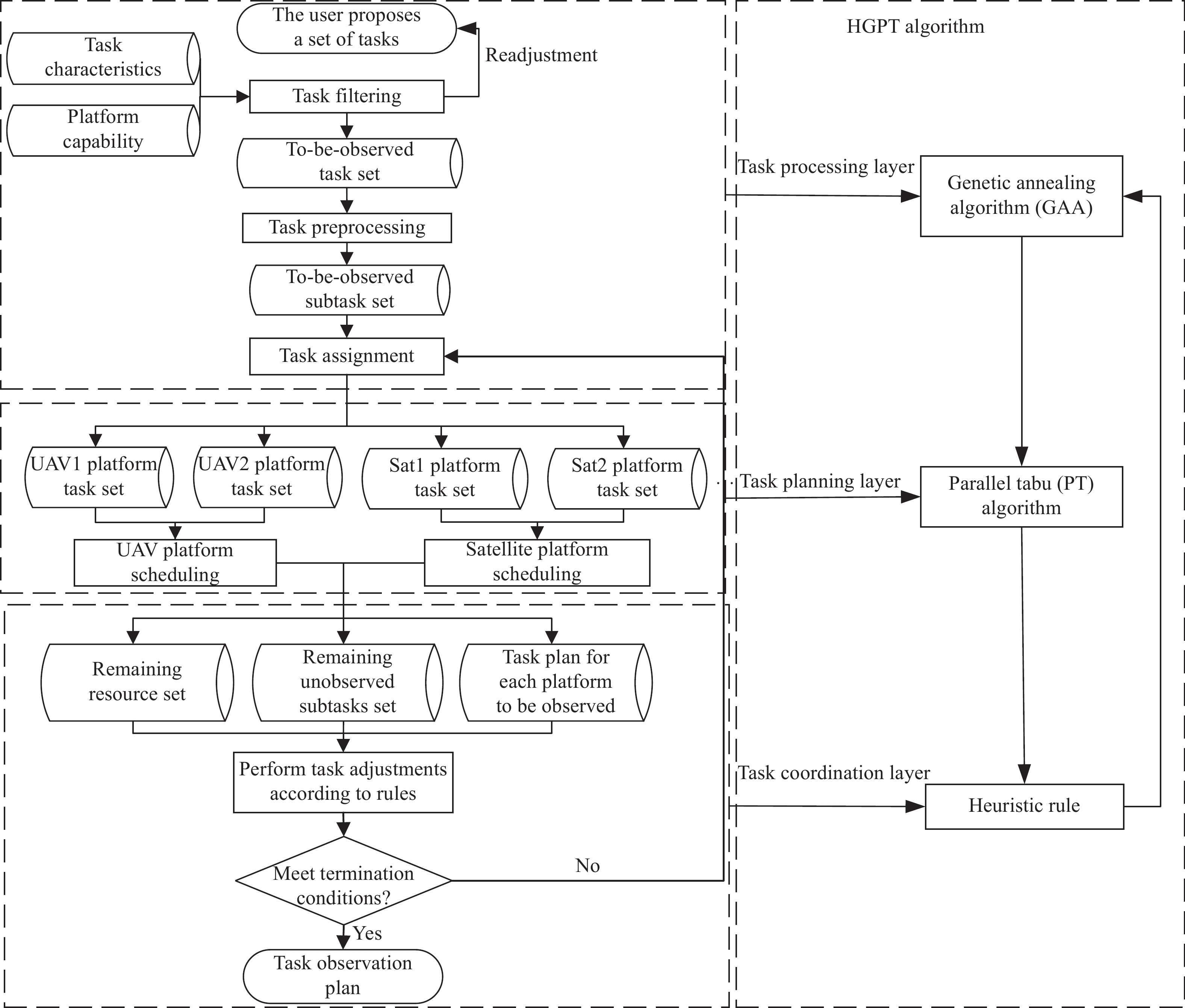

Fig 4
HGPT algorithm flow"


Fig 5
Initial solution generation method"

Fig 6
Neighborhood operators of the PT algorithm"

Fig 7
Small-scale scenario task distribution"

Table 2
Relevant parameters of task planning resources"
| Parameter | Satellite | UAV | Number of initial tasks | Number of meta-tasks |
| Observation rate/(km·h−1) | 3000 | 200 | — | — |
| Observation radius/km | 2 | 1 | — | — |
| Platform dispatch cost | 25 | 10 | — | — |
| Observation angle/(°) | 45 | — | — | — |
| Scale | 1 | 3 | {20,10,20} | {20,63,40} |
| Scale | 2 | 6 | {40,20,40} | {40,130,80} |
| Scale | 3 | 10 | {60,30,60} | {60,191,120} |
Table 3
Configuration and completion of tasks in different scenarios"
| Scene scale/km2 | Number of initial tasks | Number of Meta-tasks | Number of meta- tasks completed | Meta-task completion rate/% | Task completion rate/% | Algorithmic revenue value | Algorithmic revenue ratio/% |
| 50 | 123 | 116 | 94.3 | 96.0 | 457.00 | 94.5 | |
| 100 | 250 | 221 | 84.4 | 87.1 | 813.50 | 85.0 | |
| 150 | 371 | 297 | 80.5 | 83.3 | 1038.25 | 81.3 |

Fig 8
Algorithm running result"

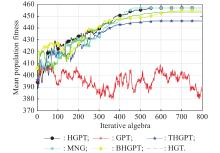
Fig 9
Calculation results of different algorithms (small scale)"
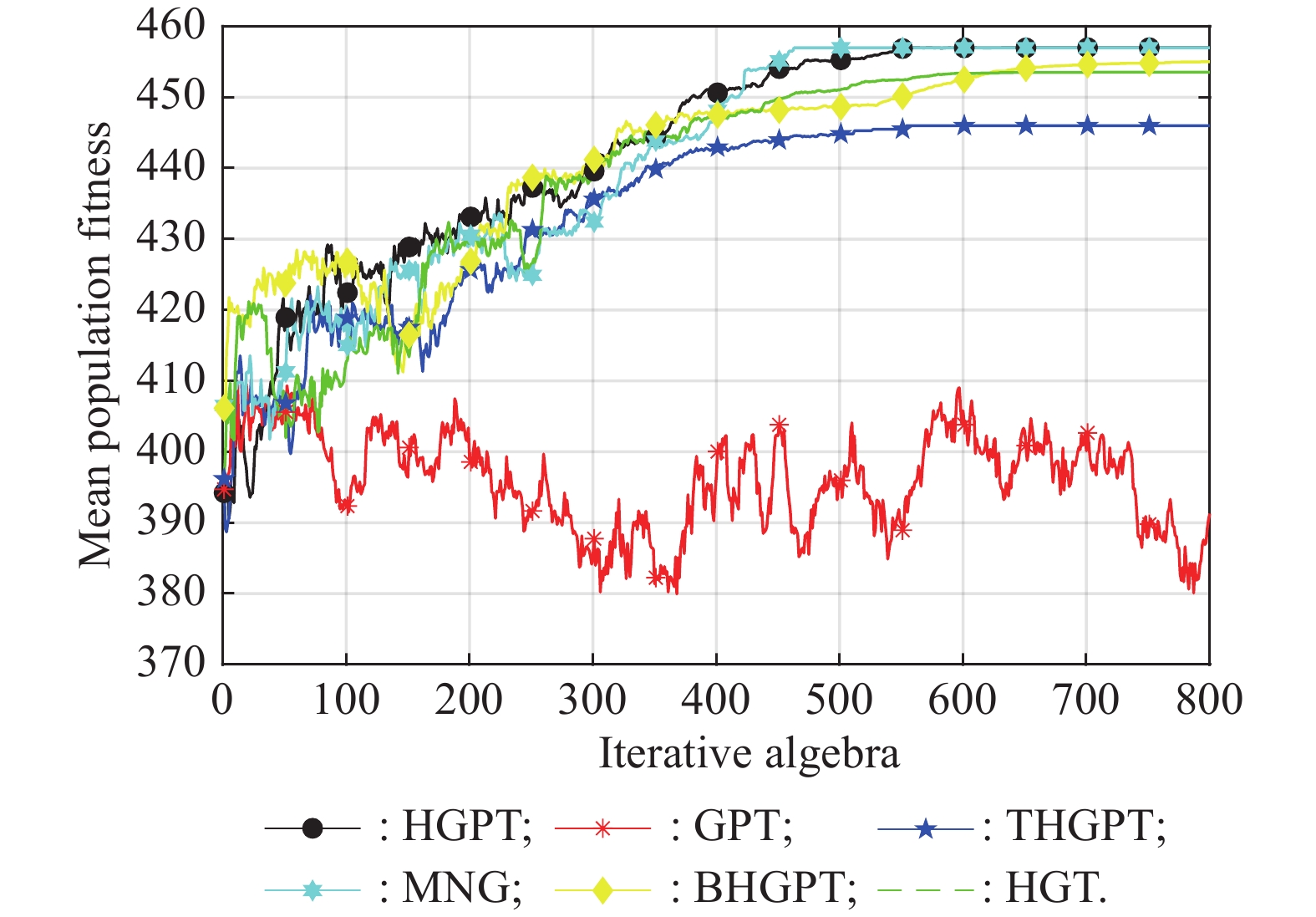
Table 4
Algorithm efficiency values in different scenarios"
| Algorithm | Number of completed meta-tasks | Time/min | Profit value | Standard deviation | |||||||||||
| 50×50 km2 | 100×100 km2 | 150×150 km2 | 50×50 km2 | 100×100 km2 | 150×150 km2 | 50×50 km2 | 100×100 km2 | 150×150 km2 | 50×50 km2 | 100×100 km2 | 150×150 km2 | ||||
| HGPT | 116 | 221 | 297 | 29.5 | 41.1 | 57.3 | 457.0 | 813.5 | 1038.3 | 0.9% | 1.5% | 1.9% | |||
| BHGPT | 112 | 220 | 294 | 29.1 | 41.9 | 56.9 | 455.0 | 811.0 | 1034.5 | 1.1% | 1.2% | 1.5% | |||
| THGPT | 109 | 205 | 278 | 29.2 | 40.7 | 56.7 | 446.0 | 794.0 | 1005.0 | 0.8% | 1.4% | 2.1% | |||
| HGT | 115 | 219 | 298 | 125.4 | 167.6 | 227.9 | 455.0 | 811.0 | 1040.0 | 0.6% | 0.9% | 1.3% | |||
| GPT | 91 | 157 | 223 | 30.5 | 40.3 | 58.6 | 409.5 | 672.0 | 801.5 | 2.3% | 2.5% | 1.7% | |||
| MNG | 116 | 223 | 296 | 231.5 | 316.7 | 464.5 | 457.0 | 816.0 | 1044.0 | 0.4% | 0.5% | 0.7% | |||
| 1 |
SHI H R, LU F X, WANG H Y, et al Optimal observation configuration of UAVs based on angle and range measurements and cooperative target tracking in three-dimensional space. Journal of Systems Engineering and Electronics, 2020, 31 (5): 996- 1008.
doi: 10.23919/JSEE.2020.000074 |
| 2 |
WANG Z N, LIN M, TANG X G, et al Multi-objective robust secure beamforming for cognitive satellite and UAV networks. Journal of Systems Engineering and Electronics, 2021, 32 (4): 789- 798.
doi: 10.23919/JSEE.2021.000068 |
| 3 | MORRIS R, DUNGAN J L, EDGINGTON W, et al. Coordinated science campaign scheduling for sensor webs. Proc. of the IEEE International Geoscience and Remote Sensing Symposium, 2005. DOI: 10.1109/IGARSS.2005.1526213. |
| 4 | MORRIS R, DUNGAN J L, BRESINA J L Challenges in coordinating remote sensing systems. Proc. of the AAAI Spring Symposium: Distributed Plan and Schedule Management, 2006, 65- 72. |
| 5 | HEROLD T, ABRAMSON M, BALAKRISHNAN H, et al. Asynchronous distributed optimization for the coordinated planning of air and space assets. Cambridge: Massachusetts Institute of Technology, 2010. |
| 6 |
LIANG X X, CHEN C, LI J, et al Research on aerospace cooperative continuation observation strategy for maritime moving target. Proc. of the MATEC Web of Conferences, 2016, 81, 04001.
doi: 10.1051/matecconf/20168104001 |
| 7 | YU J Research on key technologies of cooperative task scheduling for airborne and spaceborne earth observing assets. Changsha: National University of Defense Technology, 2011. |
| 8 | LI J, ZHONG Z N, JING N, et al Space-air resources multi-phase cooperation task planning approach based on heterogeneous MAS model. Acta Aeronautica et Astronautica Sinica, 2013, 34 (7): 1682- 1697. |
| 9 | LI J, ZHONG Z N, HU W, et al A service model based on SWE for space-aeronautics cooperation earth observing operations. Journal of National University of Defense Technology, 2013, 35 (3): 108- 113. |
| 10 | LI X M, LIAO W K, WU G H, et al A two-stage iterative optimazation method for the coordinated task planning of space and air observation resources. Control and Decision, 2021, 36 (5): 1147- 1156. |
| 11 |
WANG Y, SHENG M, ZHUANG W H, et al Multi-resource coordinate scheduling for earth observation in space information networks. IEEE Journal on Selected Areas in Communications, 2018, 36 (2): 268- 279.
doi: 10.1109/JSAC.2018.2804045 |
| 12 | HOU K W Research on air-space cooperative task planning for reconnaissance and surveillance. Changsha: National University of Defense Technology, 2009. |
| 13 | BAI G Q, XING L N, CHEN Y W Scheduling multi-platforms collaborative disasters monitoring based on coevolution algorithm. Research Journal of Chemistry and Environment, 2012, 16, 43- 50. |
| 14 |
WU G H, PEDRYCZ W, LI H F, et al Coordinated planning of heterogeneous earth observation resources. IEEE Trans. on Systems Man and Cybernetics-Part A: Systems and Humans, 2015, 46 (1): 109- 125.
doi: 10.1109/TSMC.2015.2431643 |
| 15 | XIANG S, CHEN Y G, LI G L, et al Review on satellite autonomous and cooperative task scheduling planning. Acta Automatica Sinica, 2019, 45 (2): 252- 264. |
| 16 | JIA G W, WANG J F Research review of UAV swarm mission planning method. Systems Engineering and Electronics, 2021, 43 (1): 99- 111. |
| 17 | DU Y H, WANG T, XIN B, et al A data-driven parallel scheduling approach for multiple agile Earth observation satellites. IEEE Trans. on Evolutionary Computation, 2019, 24 (4): 679- 693. |
| 18 |
WU G H, MA M H, ZHU J H, et al Multi-satellite observation integrated scheduling method oriented to emergency tasks and common tasks. Journal of Systems Engineering and Electronics, 2012, 23 (5): 723- 733.
doi: 10.1109/JSEE.2012.00089 |
| 19 | HE L, LIU X L, LAPORTE G, et al An improved adaptive large neighborhood search algorithm for multiple agile satellites scheduling. Computer & Operations Research, 2018, 100 (12): 12- 25. |
| 20 |
WEN J, LIU X L, HE L Real-time online rescheduling for multiple agile satellites with emergent tasks. Journal of Systems Engineering and Electronics, 2021, 32 (6): 1407- 1420.
doi: 10.23919/JSEE.2021.000120 |
| 21 | CHEN H, YANG S, LI J, et al Exact and heuristic methods for observing task-oriented satellite cluster agent team formation. Mathematical Problems in Engineering, 2018, 2008, 2103625. |
| 22 | HE L, DE WEERDT M, YORKE-SMITH N Time/sequence-dependent scheduling: the design and evaluation of a general purpose tabu-based adaptive large neighbourhood search algorithm. Journal of Intelligent Manufacturing, 2019, 31, 1051- 1078. |
| 23 | JIN P, WANG C C, XIA W, et al Two-stage emergency mission planning with satellite instruction release. Systems Engineering and Electronics, 2019, 41 (4): 810- 818. |
| 24 | YAO J Y, JIN P, ZHU W M, et al Multi-satellite scheduling problem for regional targets with uneven income. Systems Engineering and Electronics, 2020, 42 (3): 638- 645. |
| 25 |
ZHAO Z Y, LU G S Receding horizon control for cooperative search of multi-UAVs based on differential evolution. International Journal of Intelligent Computing and Cybernetics, 2012, 5 (1): 145- 158.
doi: 10.1108/17563781211208260 |
| 26 | EDISON E, SHIMA T Integrated task assignment and path optimization for cooperating uninhabited aerial vehicles using genetic algorithms. Computers & Operations Research, 2011, 38 (1): 340- 356. |
| 27 |
HU J Q, WU H S, ZHAN R J, et al Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior. Journal of Systems Engineering and Electronics, 2021, 32 (6): 1463- 1476.
doi: 10.23919/JSEE.2021.000124 |
| 28 | YUNUSOGLU P, TOPALOGLU YILDIZ S Constraint programming approach for multi-resource-constrained unrelated parallel machine scheduling problem with sequence-dependent setup times. International Journal of Production Research, 2021, 60 (7): 2212- 2229. |
| 29 | NATTAF M, DAUZERE-PERES S, YUGMA C, et al Parallel machine scheduling with time constraints on machine qualifications. Computers & Operations Research, 2019, 107 (7): 61- 76. |
| 30 | SHANHCARI O, LOGENDRAN R An enhanced tabu search algorithm to minimize a bi-criteria objective in batching and scheduling problems on unrelated-parallel machines with desired lower bounds on batch sizes. Computers & Operations Research, 2017, 77 (1): 154- 176. |
| 31 |
SUN L Y, WANG Y K, HUANG W D, et al Inter-satellite communication and ranging link assignment for navigation satellite systems. GPS Solutions, 2018, 22 (2): 38.
doi: 10.1007/s10291-018-0704-3 |
| 32 | LUO C L, LI Y N, LIU Y, et al Task allocation in multi-agent system based on simulated annealing genetic algorithm. Application Research of Computers, 2012, 29 (6): 2114- 2116. |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||