
Journal of Systems Engineering and Electronics ›› 2022, Vol. 33 ›› Issue (6): 1190-1207.doi: 10.23919/JSEE.2022.000142
• SYSTEMS ENGINEERING • Previous Articles
Lei HU1( ), Boqi XI1(), Guoxing YI1,*(), Hui ZHAO1(), Jiapeng ZHONG2()
), Boqi XI1(), Guoxing YI1,*(), Hui ZHAO1(), Jiapeng ZHONG2()
Received:2021-03-15
Online:2022-12-18
Published:2022-12-24
Contact:
Guoxing YI
E-mail:maple_hsjz@163.com;xiboqi@163.com;ygx@hit.edu.cn;zhaohui@hit.edu.cn;zhong-j-p@163.com
About author:Lei HU, Boqi XI, Guoxing YI, Hui ZHAO, Jiapeng ZHONG. A multiple heterogeneous UAVs reconnaissance mission planning and re-planning algorithm[J]. Journal of Systems Engineering and Electronics, 2022, 33(6): 1190-1207.
Table 1
Nomenclature"
| Parameter | Definition | Parameter | Definition | |
| | Time | | Velocity of UAV i | |
| | Type of UAV sensor, type of targets | | Minimum turning radius of UAVi | |
| | Number of all targets in mission area | | Dubins path of any two points | |
| | Number of UAVs | | Number of targets visited by UAV i | |
| | Maximum voyage of UAV i | | Number of nodes visited by UAV i | |
| | Indicator function, sensor type loaded in UAV i | | PDM of reconnaissance mission corresponding to UAVi | |
| | Indicator function, the type of target j | | Decision vector of UAV i | |
| | Indicator function, whether the target j can be detected by UAVi | | Voyage distance cost function of UAV i | |
| | Indicator function, whether the target j is detected by UAV i | | Total voyage distance cost function of UAVs | |
| | Indicator function, the healthy state of UAV i at time | | Sampling number | |
| K | K sub-missions | PDM | Probability density matrix |
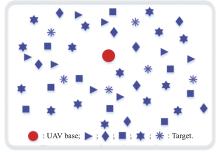
Fig 1
Reconnaissance mission scenario"
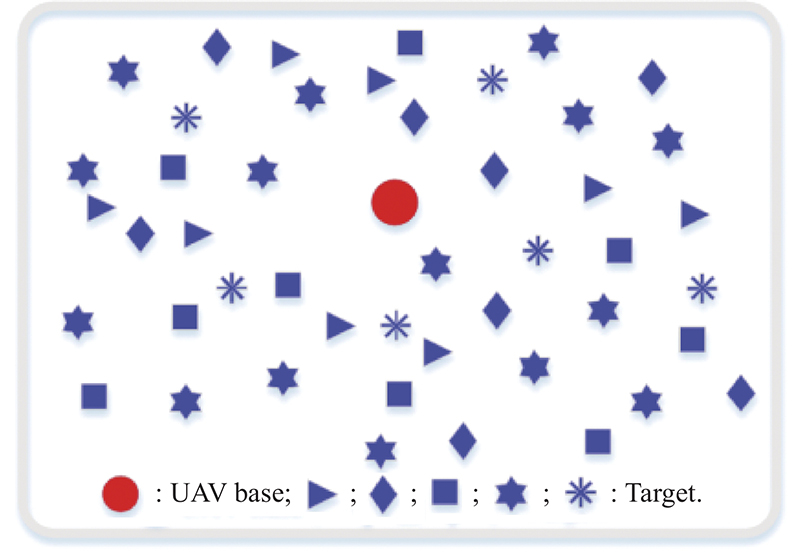

Fig 2
Reconnaissance mission planning and re-planning framework"
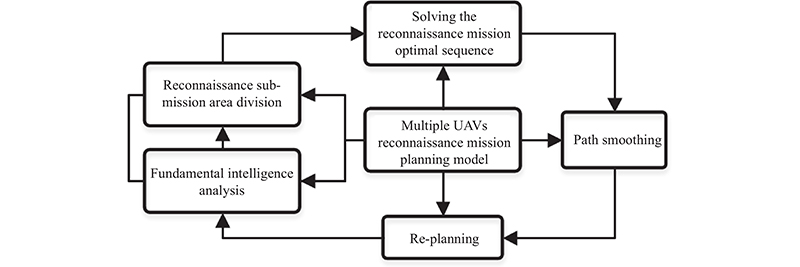

Fig 3
Dubins path diagram"
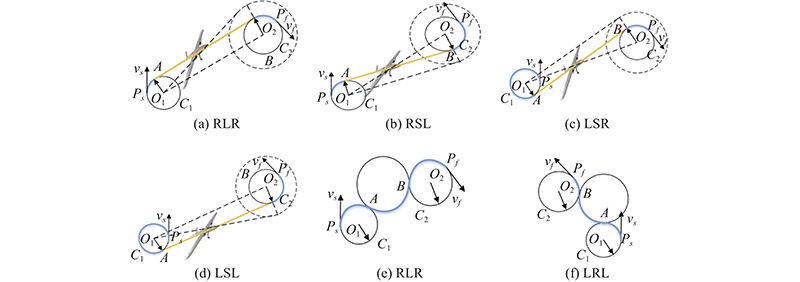
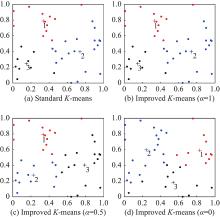
Fig 4
Clustering results"
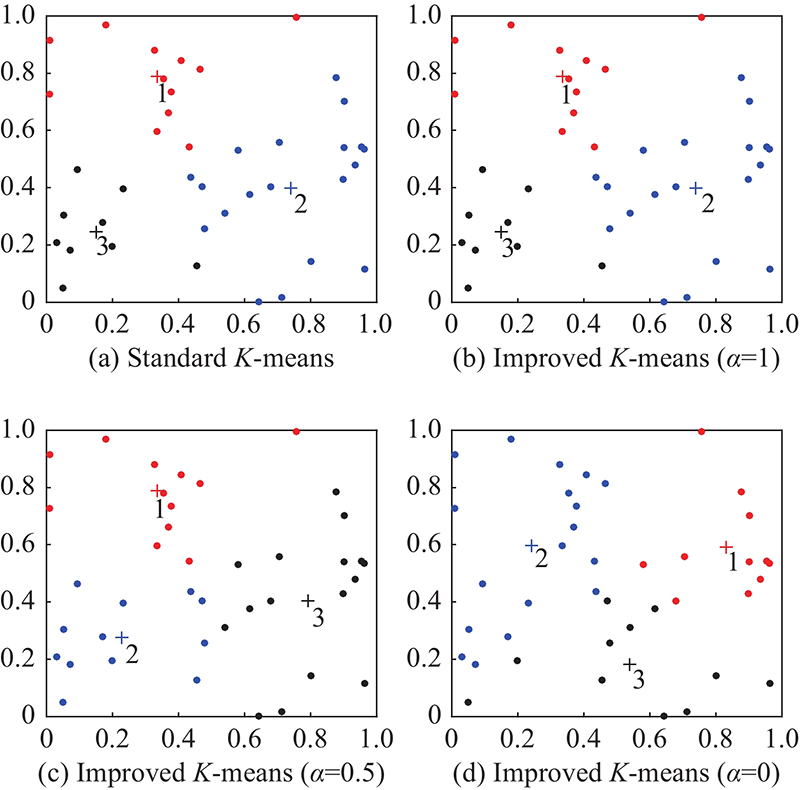
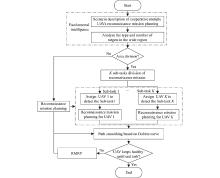
Fig 5
Flow chart of multiple UAVs RMRP"


Fig 6
Targets distribution information map"
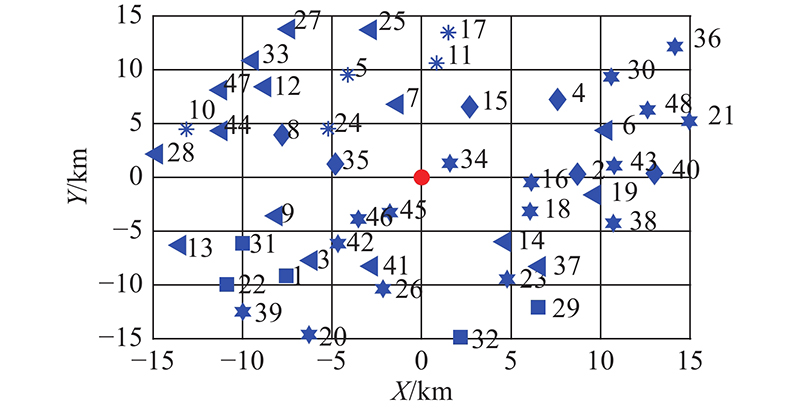
Table 2
Target type and shape"
| Parameter | Shape | ||||
| Square | Hexagons | Triangle | Diamond | Star | |
| Target type | a | b | c | d | e |
Table 3
Parameters of UAVs"
| UAV | Loaded sensors | Maximum voyage/km | Flight velocity/(m·s−1) | Minimum turning radius/m |
| UAV 1 | a, b, c | 210 | 180 | 760 |
| UAV 2 | b, c, d | 180 | 200 | 800 |
| UAV 3 | a, b, c, d | 220 | 165 | 700 |
| UAV 4 | b, c, d, e | 200 | 170 | 700 |
| UAV 5 | a, c, e | 180 | 210 | 820 |
| UAV 6 | c, d, e | 210 | 190 | 780 |
| UAV 7 | a, b, c, d, e | 230 | 150 | 660 |
Table 4
Parameters setting of proposed algorithm and benchmark algorithms"
| Method | Parameter | Parameter setting rule |
| RMP-ISCE | Ns | 200 |
| | 0.4 | |
| T | 500 | |
| OPSO, GADO, IDACO | Num | 200 |
| D | 500 | |
| MC | NMC | |
Fig 7
Initial clustering centers"
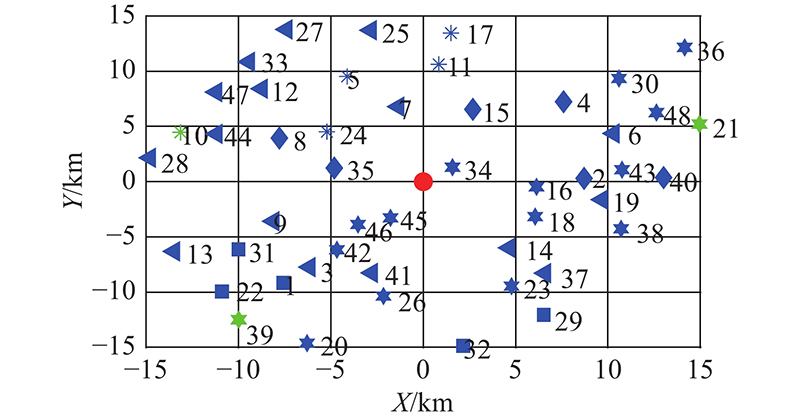

Fig 8
Submission division based on IKMC algorithm"
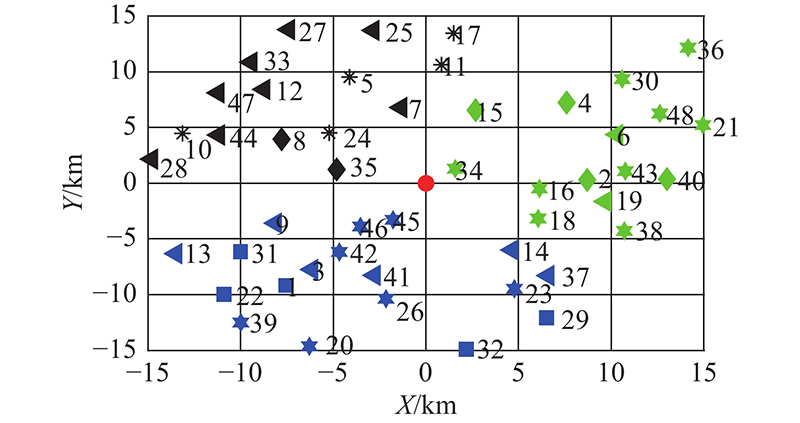
Table 5
Assignment results"
| Parameter | Submission area | ||
| 1 | 2 | 3 | |
| Number of targets | 18 | 15 | 15 |
| UAV code | UAV 1 | UAV 2 | UAV 6 |
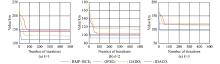
Fig 9
Fitness curve corresponding to three sub-missions"
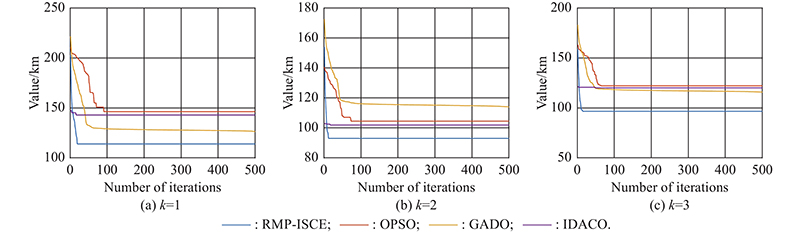
Fig 10
Average voyage distance cost"
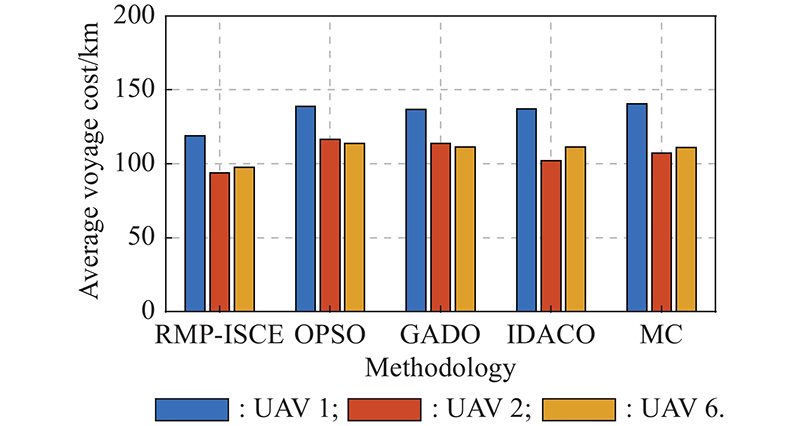
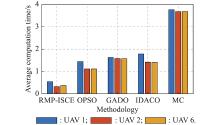
Fig 11
Average computation time"
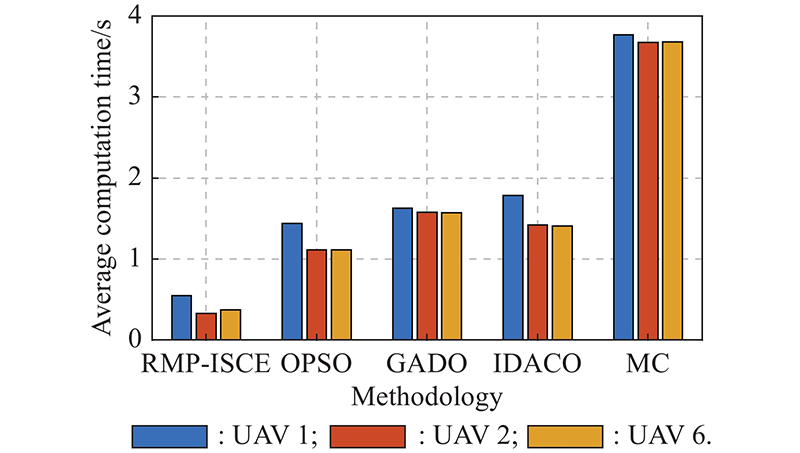

Fig 12
Path smoothing results based on Dubins curve"
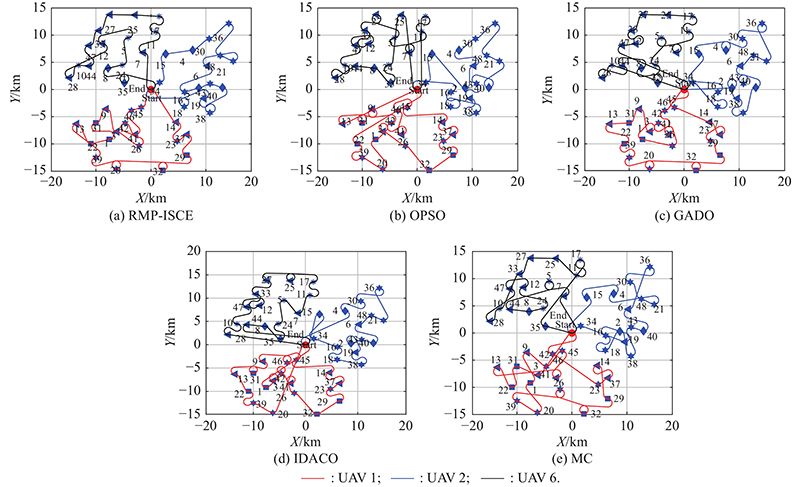
Table 6
UAVs state information"
| UAV serial number | Time/s | Healthy state | Remaining target | Re-assignment |
| UAV 1 | − | Healthy | 22,1,31,9,3,26,42,41,46,45 | 18 |
| UAV 2 | 354 | Damaged | 19,18 | − |
| UAV 6 | − | Healthy | 25,17,11,7 | 19 |
Table 7
Voyage distance cost planned by RMRP algorithm"
| UAV serial number | Before/km | After/km | Total voyage distance/km |
| UAV1 | 63.72 | 75.44 | 139.16 |
| UAV2 | 70.8 | − | 70.8 |
| UAV6 | 67.26 | 58.2 | 125.46 |
Fig 13
Average voyage distance cost"
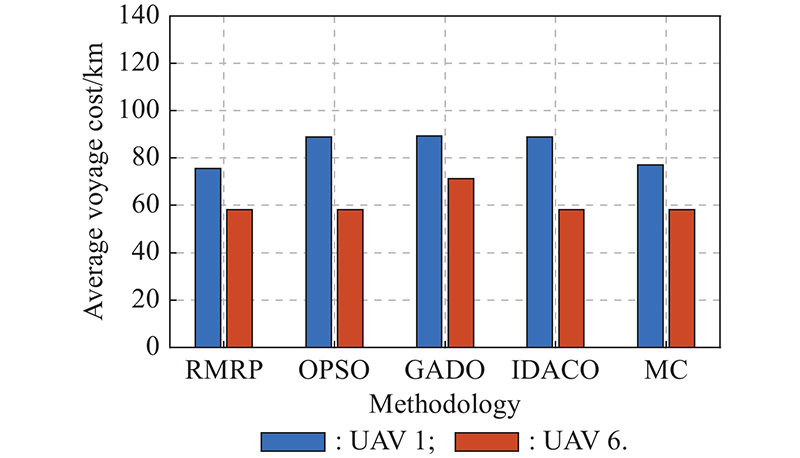
Fig 14
Average computation time"
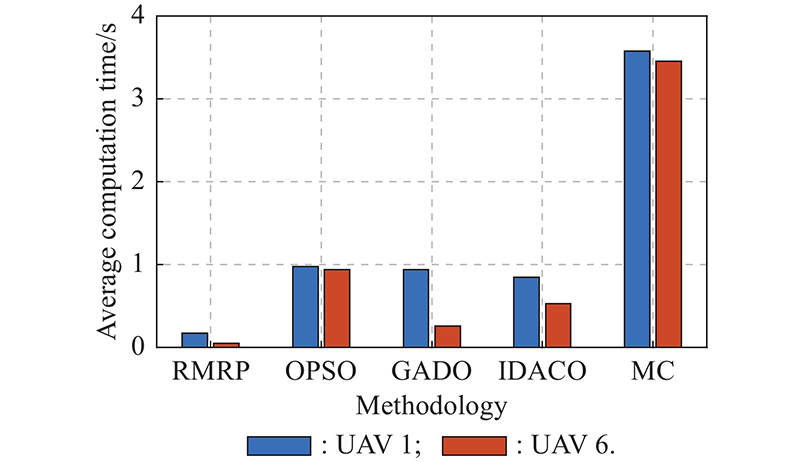

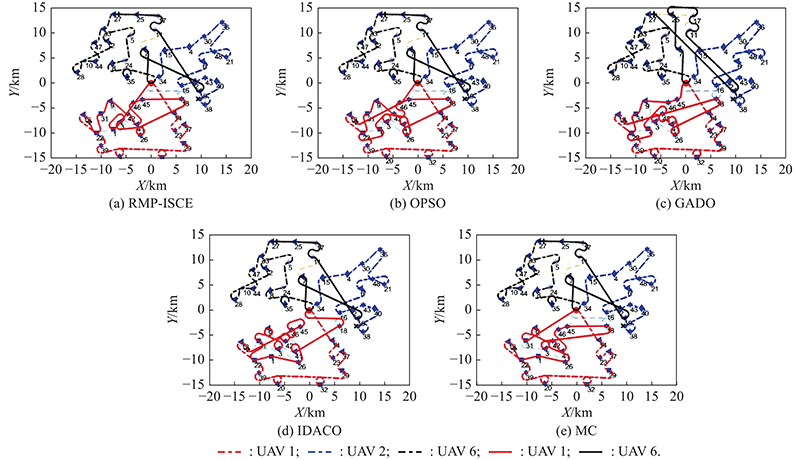
Fig 15
Path re-planning results based on Dubins curve"
| 44 | HU L, YI G X, HUANG C, et al Research on dynamic weapon target assignment based on cross-entropy. Mathematical Problems in Engineering, 2020, 2020, 8618065. |
| 1 | HADDON D R, WHITTAKER C J Office of the secretary of defense, unmanned aircraft systems roadmap. Implementation of Network, 2005, 8 (14): 263- 278. |
| 2 | JIA G W, WANG J F Research review of UAV swarm mission planning method. Journal of Systems Engineering and Electronics, 2021, 43 (1): 99- 111. |
| 3 | JOSHUA A L. Network level control of collaborative UAVs. California, USA: University of California, 2011. |
| 4 | MA C Y, FENG Z Q, ZHENG X M Development of bionic UAVs cluster technology. Transactions of Nanjing University of Aeronautics and Astronautics, 2018, 35 (1): 1- 8. |
| 5 | KHAN A, AFTAB F, ZHANG Z S UAPM: an urgency-aware packet management for disaster management using flying ad-hoc networks. China Communications, 2019, 16 (11): 167- 182. |
| 6 |
ZAFAR Z, AWAIS M, JALEEL A, et al A distributed framework of autonomous drones for planning and execution of relief operations during flood situations. International Arab Journal of Information Technology, 2020, 18 (1): 16- 24.
doi: 10.34028/iajit/18/1/3 |
| 7 |
VIDAL T, CRAINIC T G, GENDREAU M A hybrid genetic algorithm for multi-depot and periodic vehicle routing problems. Operations Research, 2012, 60 (3): 611- 624.
doi: 10.1287/opre.1120.1048 |
| 8 | CRISTIAN R A, JAVIER D S, DAVID C Weighted strategies to guide a multi-objective evolutionary algorithm for multi-UAV mission planning. Swarm & Evolutionary Computation, 2019, 44, 480- 495. |
| 9 |
THIBBOTUWAWA A, BOCEWICZ, G RADZKI G, et al UAV mission planning resistant to weather uncertainty. Sensors, 2020, 20 (2): 31963338.
doi: 10.3390/s20020515 |
| 10 | KURDI H A, EBTESAM A, MARAM A, et al Autonomous mission allocation for multi-UAV systems based on the locust elastic behavior. Applied Soft Computing, 2018, 71, 110- 126. |
| 11 |
MOTLAGH N H, BAGAA M, TALEB T Energy and delay aware mission assignment mechanism for UAV-based IoT platform. IEEE Internet of Things Journal, 2019, 6 (4): 6523- 6536.
doi: 10.1109/JIOT.2019.2907873 |
| 12 | OH G, KIM Y, AHN J Market-based mission assignment for cooperative timing missions in dynamic environments. Journal of Intelligent & Robotic Systems, 2017, 87 (1): 97- 123. |
| 13 |
CHEN H X, NAN Y, YANG Y Multi-UAV reconnaissance mission assignment for heterogeneous targets based on modified symbiotic organisms search algorithm. Sensors, 2019, 19 (3): 734- 754.
doi: 10.3390/s19030734 |
| 14 | GRIPPA P Decision making in a UAV-based delivery system with impatient customers. Proc. of the IEEE/RSJ International Conference on Intelligent Robots & Systems, 2016, 5034- 5039. |
| 15 |
PADILLA G E G, KIM K J, PARK S H Flight path planning of solar-powered UAV for sustainable communication relay. IEEE Robotics and Automation Letters, 2020, 5 (4): 6772- 6779.
doi: 10.1109/LRA.2020.3014635 |
| 16 |
YAO P, XIE Z X, REN P Optimal UAV route planning for coverage search of stationary target in river. IEEE Trans. on Control Systems Technology, 2019, 27 (2): 822- 829.
doi: 10.1109/TCST.2017.2781655 |
| 17 |
MURRAY C, KARWAN M A branch-and-bound-based solution approach for dynamic rerouting of airborne platforms. Naval Research Logistics, 2013, 60 (2): 141- 159.
doi: 10.1002/nav.21526 |
| 18 | HUANG C Q, ZHAO K X, HAN B J, et al Maneuvering decision-making method of UAV based on approximate dynamic programming. Journal of Electronics & Information Technology, 2018, 40 (10): 2447- 2452. |
| 19 | LIN C E, SYU Y M GA/DP hybrid solution for UAV multi-target path planning. Journal of Aeronautics Astronautics and Aviation, 2016, 48 (3): 203- 220. |
| 20 | PONDA S S, JOHNSON L B, GERAMIFARD A, et al Cooperative mission planning for multi-UAV teams. Handbook of Unmanned Aerial Vehicles, Dordrechit: Spring, 2015. |
| 21 | ZHEN Z, XING D J, GAO C Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm. Aerospace Science & Technology, 2018, 76, 402- 411. |
| 22 | KIVANC O C An approach to improve the performance of cooperative unmanned vehicle team. Turkish Journal of Electrical Engineering & Computer Sciences, 2019, 27 (2): 1428- 1444. |
| 23 | HU C Y, LIU W D, YU T X, et al Analysis of multi task planning model based on UAV real-time data. Journal of Systems Engineering and Electronics, 2021, 43 (3): 747- 754. |
| 24 | PENG Y F, YU Q, LI Q Y Method of multi-object equipment support task planning based on improved particle swarm optimization. Journal of Systems Engineering and Electronics, 2017, 39 (3): 562- 568. |
| 25 |
GOEZ G D, VELEZ R A V, VALENCIA J S B UAV route planning optimization using PSO implemented on microcontrollers. IEEE Latin America Transactions, 2016, 14 (4): 1705- 1710.
doi: 10.1109/TLA.2016.7483504 |
| 26 | SHIVGAN R, DONG Z Q. Energy-efficient drone coverage path planning using genetic algorithm. Proc. of the IEEE 21st International Conference on High Performance Switching and Routing, 2020: 1−6. DOI: 10.1109/HPSR48589.2020.9098989. |
| 27 |
WU W N, WANG X G, CUI N G Fast and coupled solution for cooperative task planning of multiple heterogeneous unmanned aerial vehicles. Aerospace Science and Technology, 2018, 79, 131- 144.
doi: 10.3390/app10124154 |
| 28 | RADMANESHA M, KUMARB M, SARIMB M Grey wolf optimization-based sense and avoid algorithm in a Bayesian framework for multiple UAV path planning in an uncertain environment. Aerospace Science and Technology, 2018, 77, 168- 179. |
| 29 |
GAO C, ZHEN Z Y, GONG H J A self-organized search and attack algorithm for multiple unmanned aerial vehicles. Aerospace Science and Technology, 2016, 54, 229- 240.
doi: 10.3390/info11040226 |
| 30 |
LI P, DUAN H B A potential game approach to multiple UAV cooperative search and surveillance. Aerospace Science and Technology, 2017, 68, 403- 415.
doi: 10.1016/j.ast.2017.05.031 |
| 31 | LIU Q, SHI L, SUN L L. Path planning for UAV-mounted mobile edge computing with deep reinforcement learning. IEEE Trans. on Vehicular Technology 2020, 69(5): 5723−5728. |
| 32 | WANG B H, WU C, KE W J Intelligent planning method of combat mission based on probability graph. Journal of Systems Engineering and Electronics, 2020, 42 (12): 2795- 2801. |
| 33 |
THI H A L, NGUYEN D M, DINH T P Globally solving a nonlinear UAV mission assignment problem by stochastic and deterministic optimization approaches. Optimization Letters, 2012, 6, 315- 329.
doi: 10.1007/s11590-010-0259-x |
| 34 | EDISON E, SHIMA T Integrated mission assignment and path optimization for cooperating uninhabited aerial vehicles using genetic algorithms. Computers & Operations Research, 2011, 38 (1): 340- 356. |
| 35 |
FOSSEN T I, PETTERSEN K Y, GALEAZZI R Line-of-sight path following for Dubins paths with adaptive sideslip compensation of drift forces. IEEE Trans. on Control Systems Technology, 2015, 23 (2): 820- 827.
doi: 10.1109/TCST.2014.2338354 |
| 36 |
DUBINS L E On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents. American Journal of Mathematics, 1957, 79 (3): 497- 516.
doi: 10.2307/2372560 |
| 37 | SHKEL A M, LUMELSKY V Classification of the Dubins set. Robotics & Autonomous Systems, 2001, 34 (4): 179- 202. |
| 38 |
LIKAS A, VLASSIS N, VERBEEK J J The global k-means clustering algorithm. Pattern Recognition, 2003, 36 (2): 451- 461.
doi: 10.1016/S0031-3203(02)00060-2 |
| 39 |
MODHA D S, SPANGLER W S Feature weighting in k-means clustering . Machine Learning, 2003, 52, 217- 237.
doi: 10.1023/A:1024016609528 |
| 40 |
RODRIGUEZ A, LAIO A Clustering by fast search and find of density peaks. Science, 2014, 344 (6191): 1492- 1496.
doi: 10.1126/science.1242072 |
| 41 |
RUBINSTEIN R Y Optimization of computer simulation models with rare events. European Journal of Operational Research, 1997, 99, 89- 112.
doi: 10.1016/S0377-2217(96)00385-2 |
| 42 | RUBINSTEIN R Y The cross-entropy method for combinatorial and continuous optimization. Methodology and Computing in Applied Probability, 1999, 2, 127- 190. |
| 43 |
BOER P T D, KROESE D P, MANNOR S A tutorial on the cross-entropy method. Annals of Operations Research, 2005, 134, 19- 67.
doi: 10.1007/s10479-005-5724-z |
| [1] | Wu Hao & Zuo Hongfu. Using genetic/simulated annealing algorithm to solve disassembly sequence planning [J]. Journal of Systems Engineering and Electronics, 2009, 20(4): 906-912. |
| [2] |
Li Bo , Li Xinjun & Ζhao Zhiyan.
Novel algorithm for constructing support vector machine regression ensemble
[J]. Journal of Systems Engineering and Electronics, 2006, 17(3): 541-545.
|
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||