
Journal of Systems Engineering and Electronics ›› 2023, Vol. 34 ›› Issue (2): 501-514.doi: 10.23919/JSEE.2023.000049
• CONTROL THEORY AND APPLICATION • Previous Articles
Xiaoyu WANG1( ), Sijia SUN1(), Feng XIAO1,2,*(), Mei YU1()
), Sijia SUN1(), Feng XIAO1,2,*(), Mei YU1()
Received:2022-09-30
Online:2023-04-18
Published:2023-04-18
Contact:
Feng XIAO
E-mail:xiaoyu_wang@ncepu.edu.cn;Sunsj1998@163.com;fengxiao@ncepu.edu.cn;meiyu@ncepu.edu.cn
About author:Supported by:Xiaoyu WANG, Sijia SUN, Feng XIAO, Mei YU. Dynamic event-triggered formation control of second-order nonholonomic systems[J]. Journal of Systems Engineering and Electronics, 2023, 34(2): 501-514.
Add to citation manager EndNote|Reference Manager|ProCite|BibTeX|RefWorks
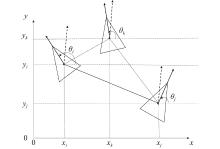
Fig 1
States between two robots in the Cartesian coordinate"
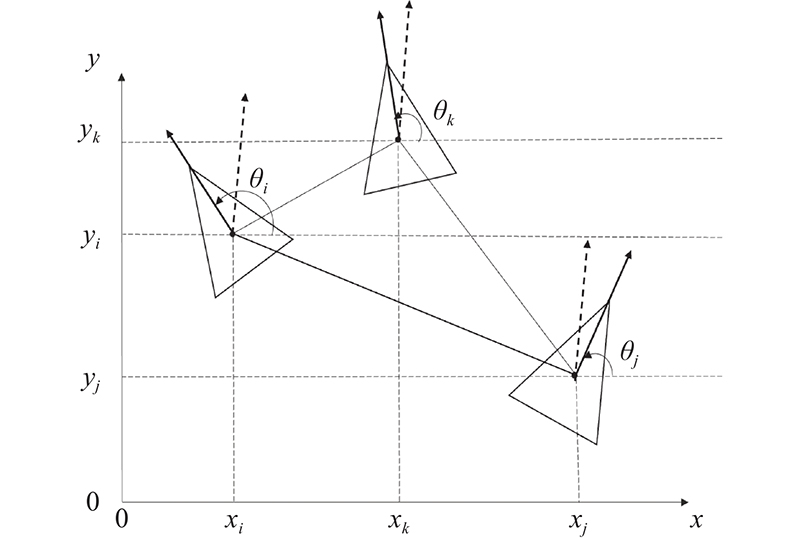
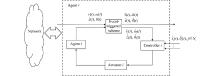
Fig 2
Event-triggered control with velocity measurements"
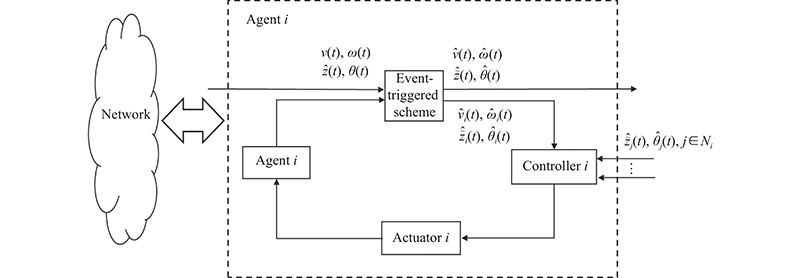

Fig 3
Event-detecting process"

Fig 4
Event-triggered control without velocity measurements"
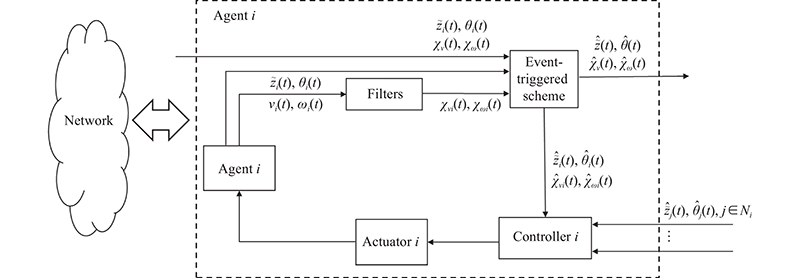
Fig 5
Communication topology $ {\boldsymbol{G}} $ "
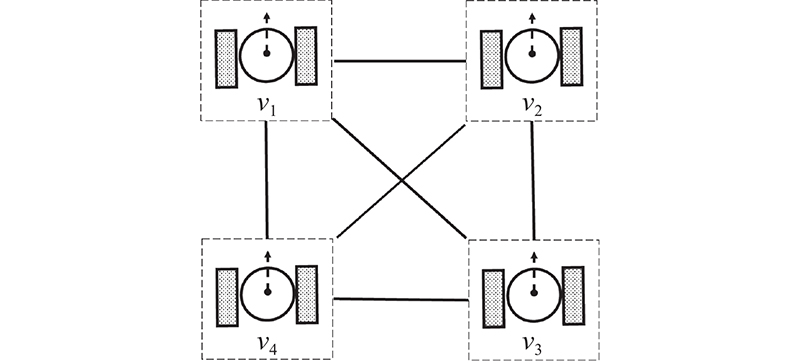
Table 1
Initial conditions and relative desired positions"
| Parameter | Agent 1 | Agent 2 | Agent 3 | Agent 4 |
| | 4 | −2 | 2 | 6 |
| | 8 | 8 | −2 | −2 |
| | | | | |
| | 0.001 | 0.002 | 0 | 0.003 |
| | 0.05 | 0.06 | 0.08 | 0.03 |
| | 2 | −2 | −2 | 2 |
| | 2 | 2 | −2 | −2 |
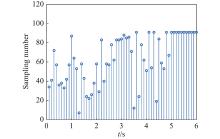
Fig 6
Total numbers of data sampling for the four mobile robots every 1/10 unit of time within 6 s"
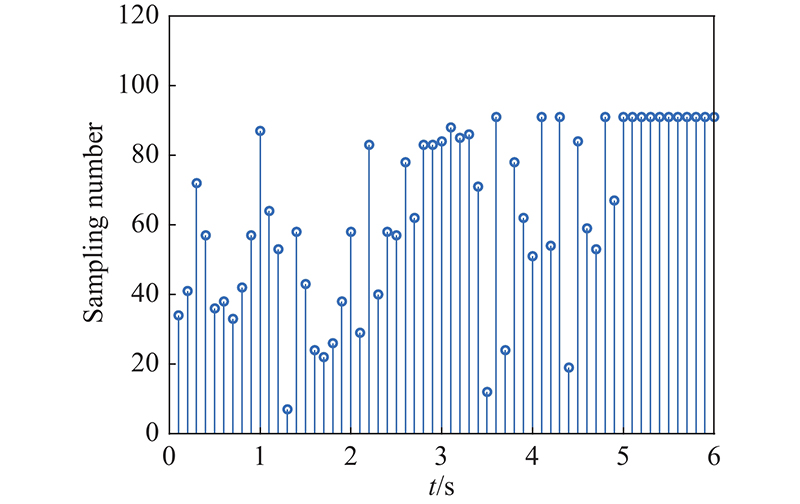
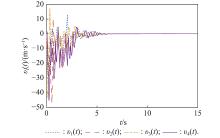
Fig 7
Evolution of ${\boldsymbol{v}}_{\boldsymbol{i}}({\boldsymbol{t}})$ "
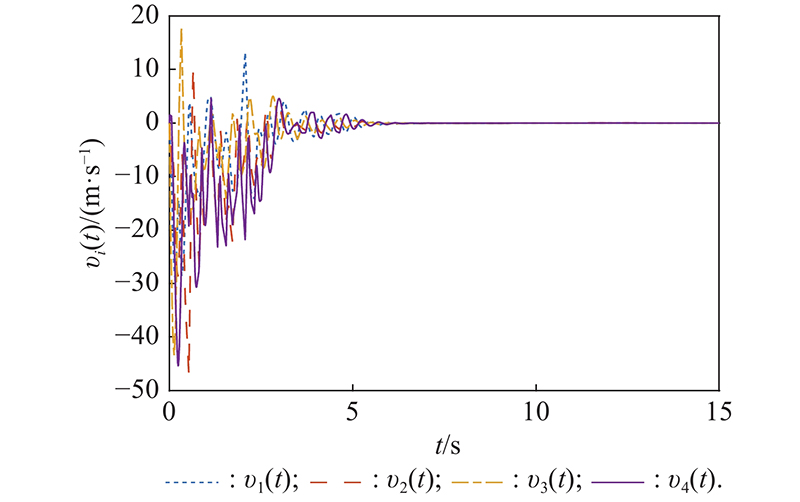
Fig 8
Evolution of ${\boldsymbol{\omega}}_{\boldsymbol{i}}({\boldsymbol{t}})$ "
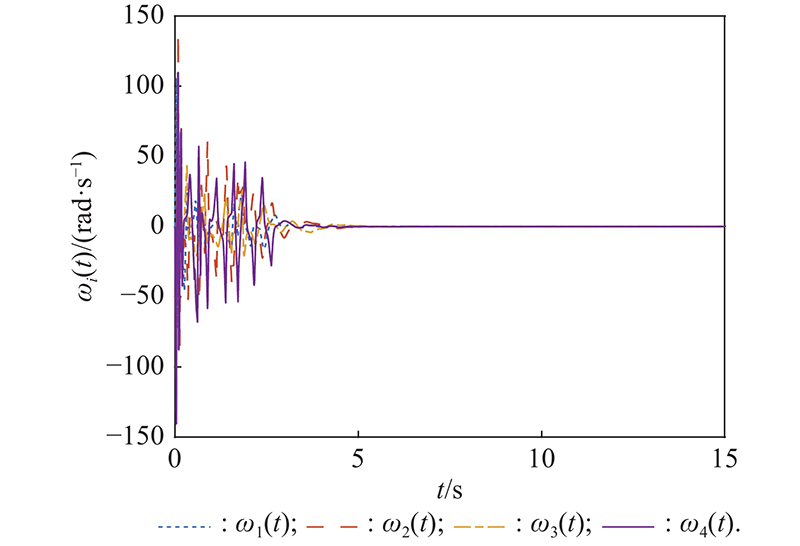
Fig 9
Evolution of ${\boldsymbol{\theta}}_{\boldsymbol{i}}({\boldsymbol{t}})$ "
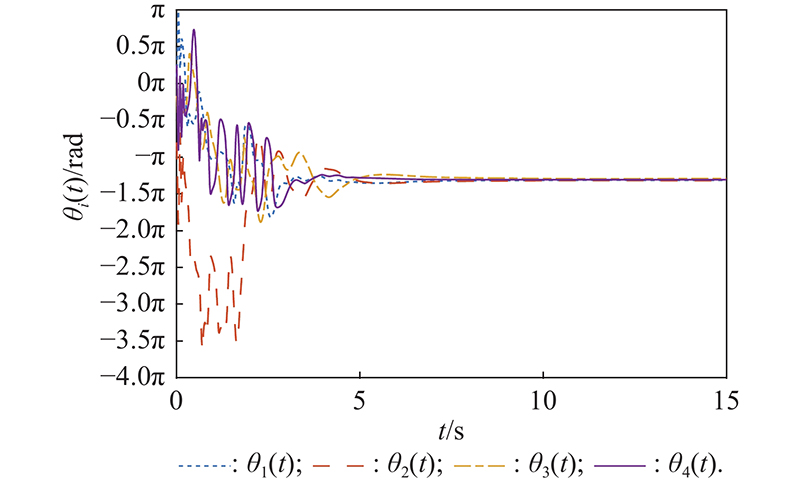
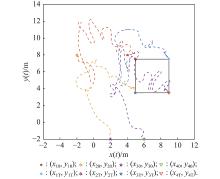
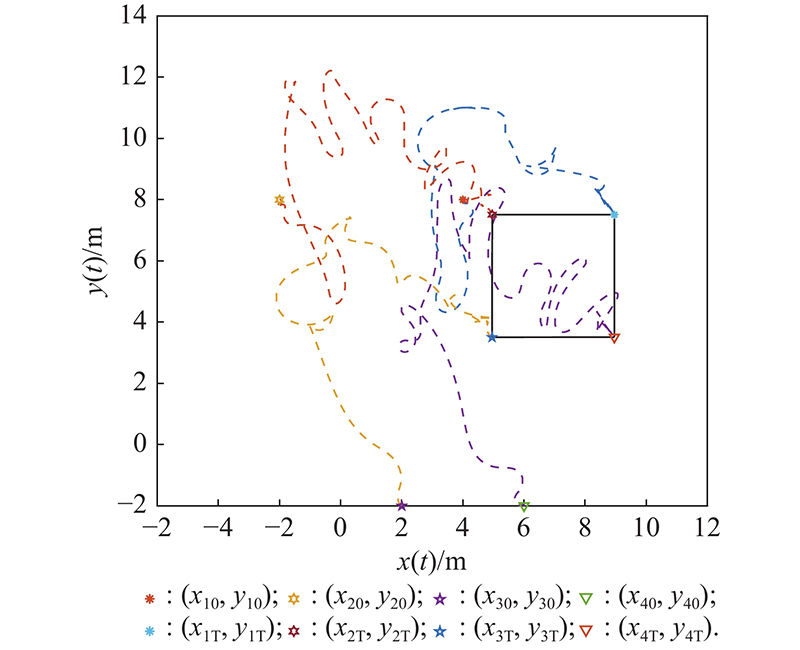
Fig 10
Trajectories and formation of the four mobile robots"
| 1 |
KNORN S, CHEN Z, MIDDLETON R H Overview: collective control of multiagent systems. IEEE Trans. on Control of Network Systems, 2016, 3 (4): 334- 347.
doi: 10.1109/TCNS.2015.2468991 |
| 2 | CAI X, XIAO F, WEI B, et al. Nash equilibrium seeking for general linear systems with disturbance rejection. IEEE Trans. on Cybernetics, 2022. DOI: 10.1109/TCYB.2022.3195361. |
| 3 |
CAI X, XIAO F, WEI B Distributed generalized Nash equilibrium seeking for noncooperative games with unknown cost functions. International Journal of Robust and Nonlinear Control, 2022, 32 (16): 8948- 8964.
doi: 10.1002/rnc.6314 |
| 4 | CAO M, MORSE A S, YU C, et al Controlling a triangular formation of mobile autonomous agents. Proc. of the IEEE 46th Conference on Decision and Control, 2007, 3603- 3608. |
| 5 |
OH K K, PARK M C, AHN H S A survey of multi-agent formation control. Automatica, 2015, 53, 424- 440.
doi: 10.1016/j.automatica.2014.10.022 |
| 6 |
LI X, ZHU D Q, QIAN Y A survey on formation control algorithms for multi-AUV system. Unmanned Systems, 2014, 2 (4): 351- 359.
doi: 10.1142/S2301385014400093 |
| 7 | REN W. Consensus based formation control strategies for multi-vehicle systems. Proc. of the American Control Conference, 2006. DOI: 10.1109/ACC.2006.1657384. |
| 8 |
YU W W, CHEN G R, CAO M Consensus in directed networks of agents with nonlinear dynamics. IEEE Trans. on Automatic Control, 2011, 56 (6): 1436- 1441.
doi: 10.1109/TAC.2011.2112477 |
| 9 | ZHOU L Q, LIU J, ZHENG Y S, et al. Game-based consensus of hybrid multiagent systems. IEEE Trans. on Cybernetics, 2022. DOI: 10.1109/TCYB.2022.3215619. |
| 10 |
WEI B, XIAO F Distributed consensus control of linear multiagent systems with adaptive nonlinear couplings. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2021, 51 (2): 1365- 1370.
doi: 10.1109/TSMC.2019.2896915 |
| 11 |
LIANG Z, YI L U, XU S D, et al Multiple UAVs cooperative formation forming control based on back-stepping-like approach. Journal of Systems Engineering and Electronics, 2018, 29 (4): 816- 822.
doi: 10.21629/JSEE.2018.04.16 |
| 12 |
ANTONIO V T J, ADRIEN G, MANUEL A M, et al Event-triggered leader-following formation control for multi-agent systems under communication faults: application to a fleet of unmanned aerial vehicles. Journal of Systems Engineering and Electronics, 2021, 32 (5): 1014- 1022.
doi: 10.23919/JSEE.2021.000086 |
| 13 |
ZHAO S Y Affine formation maneuver control of multiagent systems. IEEE Trans. on Automatic Control, 2018, 63 (12): 4140- 4155.
doi: 10.1109/TAC.2018.2798805 |
| 14 | YUAN Y, WANG Y J, GUO L Sliding-mode-observer-based time-varying formation tracking for multispacecrafts subjected to switching topologies and time-delays. IEEE Trans. on Automatic Control, 2020, 66 (8): 3848- 3855. |
| 15 | SHARMA R S, MONDAL A, BEHERA L Tracking control of mobile robots in formation in the presence of disturbances. IEEE Trans. on Industrial Informatics, 2020, 17 (1): 110- 123. |
| 16 | AJWAD S A, MOULAY E, DEFOORT M, et al Collision-free formation tracking of multi-agent systems under communication constraints. IEEE Control Systems Letters, 2020, 5 (4): 1345- 1350. |
| 17 | REN W, BEARD R W. Distributed consensus in multi-vehicle cooperative control. New York: Springer Verlag, 2008. |
| 18 |
LORIA A, PANTELEY E, POPOVIC D, et al A nested matrosov theorem and persistency of excitation for uniform convergence in stable nonautonomous systems. IEEE Trans. on Automatic Control, 2005, 50 (2): 183- 198.
doi: 10.1109/TAC.2004.841939 |
| 19 |
YANG J Y, XIAO F, CHEN T W Formation tracking of nonholonomic systems on the special euclidean group under fixed and switching topologies: an affine formation strategy. SIAM Journal on Control and Optimization, 2021, 59 (4): 2850- 2874.
doi: 10.1137/20M1328130 |
| 20 |
MIAO Z Q, LIU Y H, WANG Y N, et al Distributed estimation and control for leader-following formations of nonholonomic mobile robots. IEEE Trans. on Automation Science and Engineering, 2018, 15 (4): 1946- 1954.
doi: 10.1109/TASE.2018.2810253 |
| 21 |
YU X, LIU L Distributed formation control of nonholonomic vehicles subject to velocity constraints. IEEE Trans. on Industrial Electronics, 2016, 63 (2): 1289- 1298.
doi: 10.1109/TIE.2015.2504042 |
| 22 |
WANG P, DING B C Distributed RHC for tracking and formation of nonholonomic multi-vehicle systems. IEEE Trans. on Automatic Control, 2014, 59 (6): 1439- 1453.
doi: 10.1109/TAC.2014.2304175 |
| 23 |
WU K, SU J Y, SUN C Y Output feedback control for mobile robot systems with significant external disturbances. Science in China Series F: Information Sciences, 2020, 63 (9): 199201.
doi: 10.1007/s11432-018-9768-8 |
| 24 | XUE Q Y, YU X State feedback finite-time tracking controller of nonholonomic mobile robot with actuator delay. Proc. of the Chinese Control and Decision Conference, 2018, 2832- 2836. |
| 25 |
MAGHENEM M, BAUTISTA A, NUNO E, et al Consensus of multi-agent systems with nonholonomic restrictions via Lyapunov’s direct method. IEEE Control Systems Letters, 2019, 3 (2): 344- 349.
doi: 10.1109/LCSYS.2018.2879043 |
| 26 | MAGHENEM M, LORIA A, NUNO E, et al Consensus-based formation control of networked nonholonomic vehicles with delayed communications. IEEE Trans. on Automatic Control, 2020, 66 (5): 2242- 2249. |
| 27 |
NUNO E, LORIA A, HERNANDEZ T, et al Distributed consensus-formation of force-controlled nonholonomic robots with time-varying delays. Automatica, 2020, 120, 109114.
doi: 10.1016/j.automatica.2020.109114 |
| 28 | LORIA A, NUNO E, PANTELEY E. Observerless output-feedback consensus-based formation control of 2nd-order nonholonomic systems. IEEE Trans. on Automatic Control, 2021.DOI: 10.1109/TAC.2021.3136140. |
| 29 | XIAO F, CHEN T W, GAO H J Consensus in time-delayed multi-agent systems with quantized dwell times. Systems & Control Letters, 2017, 104, 59- 65. |
| 30 |
XIAO F, SHI Y, CHEN T W Robust stability of networked linear control systems with asynchronous continuous-and discrete-time event-triggering schemes. IEEE Trans. on Automatic Control, 2021, 66 (2): 932- 939.
doi: 10.1109/TAC.2020.2987649 |
| 31 | GIRARD A Dynamic triggering mechanisms for event-triggered control. IEEE Trans. on Automatic Control, 2014, 60 (7): 1992- 1997. |
| 32 | YI X L, LIU K, DIMAROGONAS D V, et al Dynamic event-triggered and self-triggered control for multi-agent systems. IEEE Trans. on Automatic Control, 2018, 64 (8): 3300- 3307. |
| 33 |
POSTOYAN R, BRAGAGNOLO M C, GALBRUN E, et al Event-triggered tracking control of unicycle mobile robots. Automatica, 2015, 52, 302- 308.
doi: 10.1016/j.automatica.2014.12.009 |
| 34 | CHEN S, FAN Y, CHEN J, et al Zeno-free analysis for non-holonomic mobile robots tracking based on event-triggered mechanism. Proc. of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2019, 907- 911. |
| 35 | UZEY H M. VIGNESH N. JAGANNATHAN S, et al Distributed consensus-based event-triggered approximate control of nonholonomic mobile robot formations. Proc. of the American Control Conference, 2017, 3194- 3199. |
| 36 |
CHU X, PENG Z X, WEN G G, et al Distributed formation tracking of multi-robot systems with nonholonomic constraint via event-triggered approach. Neurocomputing, 2018, 275, 121- 131.
doi: 10.1016/j.neucom.2017.05.007 |
| 37 |
YANG J Y, YU H, XIAO F Hybrid-triggered formation tracking control of mobile robots without velocity measurements. International Journal of Robust and Nonlinear Control, 2022, 32 (3): 1796- 1827.
doi: 10.1002/rnc.5908 |
| 38 |
YANG J Y, XIAO F, CHEN T W Event-triggered formation tracking control of nonholonomic mobile robots without velocity measurements. Automatica, 2020, 112, 108671.
doi: 10.1016/j.automatica.2019.108671 |
| 39 |
HEEMELS W H, DONKERS M, TEEL A R Periodic event-triggered control for linear systems. IEEE Trans. on Automatic Control, 2013, 58 (4): 847- 861.
doi: 10.1109/TAC.2012.2220443 |
| 40 | KHALIL H K. Nonlinear systems. 3rd ed. New Jersey: Prentice Hall, 2002. |
| [1] | Zhongcai Zhang, Yuqiang Wu, and Wei Sun. Modeling and adaptive motion/force tracking for vertical wheel on rotating table [J]. Journal of Systems Engineering and Electronics, 2015, 26(5): 1060-1069. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||